
基于监测数据的电磁频谱地图构建与验证
2023-06-10 07:08夏海洋黄纪军刘继斌
国防科技大学学报 2023年3期
查 淞,夏海洋,黄纪军,刘继斌,马 晨,李 冰
(1. 国防科技大学 电子科学学院, 湖南 长沙 410073; 2. 中国人民解放军32035 部队, 陕西 西安 710060; 3. 中国人民解放军31007 部队, 北京 100000)
电磁频谱地图(spectrum map)[1-2]也被称之为无线电环境地图(radio environment map)或无线电地图(radio map),可从时间、空间、频率和能量等多个维度对电磁环境进行定量描述[3],并结合地理信息系统进行可视化展示。电磁频谱地图为电磁空间认知与控制利用等诸多军民应用提供基础信息[4],其用途主要有四个方面:一是获取电磁频谱资源分布状况[5-6],支撑频谱资源精细化动态管理,实现电磁频谱资源高效利用;二是获取电磁辐射分布状况,为电磁污染监测与防治提供量化依据;三是获取电磁干扰行为规律,支撑黑广播、伪基站等违法行为查处,维护用频秩序;四是在军事应用领域[7],电磁频谱地图可为电磁态势生成、装备部署运用、作战用频规划和用频冲突消解等应用[8]提供辅助决策信息。因此,准确、快速构建电磁频谱地图具有十分重要的意义[9]。
根据是否需要辐射源与传播模型等先验信息,电磁频谱地图构建方法[3,10]通常分为直接构建法、间接构建法和混合构建法三类。直接构建法主要包括最近邻(nearest neighbour, NN)法[11]、自然邻点(natural neighbour interpolation, NNI)法[12]、反距离加权(inverse distance weighted, IDW)法[13]、样条(splines)法[14]、改进Shepard法[15]和梯度距离平方反比(gradient plus inverse distance squared,GIDS)法[16]等确定性插值法、克里金(Kriging)法[17]等地统计学变分插值法以及基于张量补全的多维频谱地图构建算法[18]。间接构建法需利用辐射源和传播模型等先验信息,主要包括基于完备先验信息的正演法、基于发射机位置的估计法[19]、接收信号强度差分法[20]和信噪比辅助法[21]等。混合构建法将直接构建法和间接构建法相结合,包括基于图像处理的混合构建法[22]、基于传播模型参数先验信息的贝叶斯估计构建法[23-24]、利用克里金法对传播模型构建结果进行修正的混合构建法[25-26]和基于多中心幂函数拟合的混合构建法[27]等。当前投入应用的电磁频谱地图[10]主要包括欧盟的“基于认知无线电系统测量与建模的感知无线电接入”项目和美国国防部高级研究计划局的“先进射频地图”项目等,其中前者使用的主要构建方法就是克里金法。
实际应用中,常由于存在非合作辐射源以及传播环境特性未知等原因,难以获得辐射源和传播模型相关的先验信息,使得依赖先验信息的间接构建法和混合构建法适用范围受限。与此同时,信息技术的普及使得各类设备可采集得到大量电磁环境监测数据,其中尤其以幅度的监测最为普遍。因此,如何利用接收功率监测数据,在不依赖于先验信息的条件下进行电磁频谱地图构建,成为电磁频谱地图构建研究的热点。现有构建方法中,克里金法由于其结果为最佳线性无偏估计,具备构建精度高等优点,故而应用更为广泛[28-29]。然而针对电磁频谱地图准确、快速构建的需求,克里金法仍存在如下局限性[10]:一是电磁频谱地图构建不满足克里金法所需的准二阶平稳假设或准内蕴假设前提条件,因而制约其构建精度;二是克里金法的计算复杂度随监测数据量的三次方增大,因而严重限制其构建速度。
针对上述问题,本文提出了一种基于广义回归神经网络拟合和聚类克里金的构建方法,通过趋势面拟合,将电磁频谱地图构建分解为路径衰减和阴影衰落分量的估计问题,以提升构建精度;设计监测数据聚类和自适应最优邻域选取机制,在保证构建精度的条件下减小计算数据量,以提升构建速度,从而利用数量有限的电磁环境监测数据,在不需要先验信息的条件下实现电磁频谱地图的准确、快速构建。设计并实现电磁频谱地图验证系统,搭建车载数据采集设备实测电磁环境监测数据,对所提方法的可行性及构建性能进行验证。
1 问题表述

Pr(n)=Pr,pl(n)+V(n)
(1)
式中,Pr,pl(n)和V(n)分别为确定性的路径衰减分量和随机性的阴影衰落分量。
路径衰减由辐射功率扩散及传播特性造成,因此路径衰减分量Pr,pl(n)为所有辐射源路径衰减影响的叠加,第m个辐射源在第n个监测点处的路径衰落影响[30]可表示为:
Pr,pl(n,m)=Pt(m)+K+10ηlgd0-
(2)

阴影衰落由障碍物阻挡产生的阴影效应造成,现有研究表明,阴影衰落分量为服从对数正态分布的空间相关随机量,常采用Gudmundson模型[31]对其建模,位置sr(ni)与sr(nj)处的阴影衰落分量间的协方差为:
(3)
式中,σψ为阴影衰落标准差,dc为反映衰落变化快慢的相关距离。

2 基于广义回归神经网络和聚类残差克里金的构建方法
由经验传播模型可知,路径衰减分量表征区域内监测数据的主要变化趋势,而阴影衰落分量则可看成是叠加在主要变化趋势上的加性噪声,单个辐射源信号强度随源距离变化基于仿真数据的曲线如图1所示。
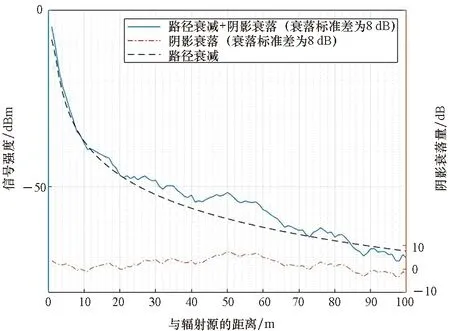
图1 单个辐射源信号强度随源距离变化曲线Fig.1 Curve of signal strength against distance from source on the condition of single radiation source
根据式(1)~(3)可知,由于确定性路径衰减分量Pr,pl(n)的存在,监测数据Pr(n)不满足克里金法所需的准二阶平稳假设或准内蕴假设前提,而其中的阴影衰落分量V(n)数学期望为0,且协方差函数仅与两点之间的距离相关,满足二阶平稳假设。因此,首先使用广义回归神经网络对趋势面进行拟合获得路径衰减分量估计,然后将监测数据与对应位置的路径衰减分量估计值作差,针对残差监测数据使用克里金法获得阴影衰落分量估计,以满足克里金法应用前提条件,提升电磁频谱地图构建精度。此外,克里金法的计算复杂度随数据量的三次方增大,然而由式(3)可知,不同位置阴影衰落分量的相关性随着距离的增加而减小,因而与待估计位置距离越远的残差监测数据参与计算所能获得的构建精度提升越小,同时还会急剧增加克里金法的计算复杂度。本文在阴影衰落分量估计时首先根据监测数据位置进行聚类,然后以克里金方差作为度量选取最优邻域参与计算,从而在保证构建精度的条件下减小参与克里金法计算的数据量,提升电磁频谱地图构建速度。
基于此,为实现电磁频谱地图的准确、快速构建,提出基于广义回归神经网络和聚类克里金的构建方法,实现流程如图2所示,主要包括基于广义回归神经网络的路径衰减分量估计和基于聚类克里金的阴影衰落分量估计两部分。

图2 基于广义回归神经网络和聚类克里金的构建方法流程图Fig.2 Flowchart of map construction method based on general regression neural network and clustering Kriging
2.1 基于广义回归神经网络的路径衰减分量估计
广义回归神经网络[32](general regression neural network,GRNN)是径向基神经网络的一种变形形式,以样本数据为后验条件,输出是输入的径向基函数和神经元参数的线性组合。GRNN以非线性回归分析理论为基础,兼具数据的内插和外推功能,具有非线性映射能力强、收敛速度快的特点,在样本数量较少时有较好的预测效果,对于不稳定的数据也有较强的处理性能。因此本文在趋势面拟合中采用GRNN进行路径衰减分量估计,包含输入层、隐含层、加和层和输出层四层,其估计流程如图3所示。

图3 路径衰减分量估计流程图Fig.3 Flowchart of path-loss component estimation
输入层接收待估计点位置s0=(x0,y0)T,其神经元的数量与位置向量s0的维数相等,传输函数使用简单的线性函数。隐含层为径向基层。由于路径衰减分量随距离按指数形式变化,因此采用高斯函数作为基函数,即:
(4)
式中:监测数据位置sr(n)为基函数的中心向量;σs为平滑因子,控制感兴趣区域R内路径衰减分量整体趋势的平滑程度,也是广义回归神经网络对于环境特征的描述,与路径衰减指数密切相关。
图4即为仿真实验中,不同平滑因子条件下,广义回归神经网络对于路径衰减趋势面拟合效果的对比。路径衰减指数为3的情况下,由图可见,平滑因子的取值在2~6之间能较好地对路径衰减分量进行拟合。

(a) σs=2
加和层则包含两种神经元:第一种为计算隐含层各神经元的代数和,即分母单元;第二种为计算隐含层神经元的加权和,权值为各训练样本的期望输出值,即分子单元。输出层将加和层的分子单元、分母单元的输出相除,作为待估计点位置的路径衰减分量估计值,即:
(5)
2.2 基于聚类残差克里金的阴影衰落分量估计
步骤1:残差监测数据聚类。近邻传播(affinity propagation,AP)聚类[33]是一种基于近邻信息传递的聚类方法,在线性递归的过程中实现所有点到最近的类代表点的相似度之和最大,可在不预设类数量等信息的前提下自适应聚类,适应基于监测数据的电磁频谱地图构建中监测数据空间采样率低、分布随机性强等特点。定义不同监测数据位置sr(ni)和sr(nj)的相似度为m(i,j),其表达式为:
(6)
使用N阶零矩阵初始化“吸引度”矩阵R和“归属度”矩阵A,并通过式(7)、式(8)分别对两个矩阵中的第i行、第j列元素进行更新。
(7)
(8)
当迭代运算后聚类边界不再发生变化时,或达到预设的最大迭代次数后停止迭代。聚类结果按照与待估计位置s0距离由近至远标记为C1,C2,…,CK,其中K为簇的数量。

(9)
为保证式(9)的估计结果为最优无偏估计,根据二阶平稳假设,式(9)中的克里金权重系数由式(10)求得
Kλ=M
(10)

其中,理论变差函数γ(·)定量描述阴影衰落分量的空间相关性,由残差监测数据计算得到的实验变差函数配以相应理论模型拟合得到。
同时,式(9)估计精度由克里金方差表示:
(11)
式中,L为拉格朗日常数,由式(10)求解。
步骤3:最优邻域选取。由于阴影衰落分量空间相关性随着间距增加而减小,因而与位置s0相距较远的残差监测数据构建式(9)所能获得的精度提升有限,同时还会显著增加式(10)求解的计算复杂度。为量化新增数据对估计结果的贡献,使用增添数据前后克里金方差的相对变化作为最优邻域选取准则。
(12)

3 实验验证与性能分析
为验证本文方法的可行性及性能,本节设计并实现电磁频谱地图验证系统,搭建车载数据采集设备实测电磁环境监测数据,并选取应用最为广泛的IDW法、NN法以及普通克里金(ordinary Kriging,OK)法[17]作为参考方法,进行对比分析。
3.1 验证系统组成与实测数据测试
电磁频谱地图验证系统组成如图5所示,主要包含数据采集控制、频谱地图构建、可视化交互和数据库4个软件模块以及数据采集外设。系统工作过程中,数据采集控制模块控制数据采集外设采集预设频段内的监测数据,电磁频谱地图构建模块使用监测数据实现电磁频谱地图构建,可视化交互模块将构建结果结合地理信息(行政图、卫星影像图等)进行展示,数据库模块用于管理监测数据和地理信息等数据。
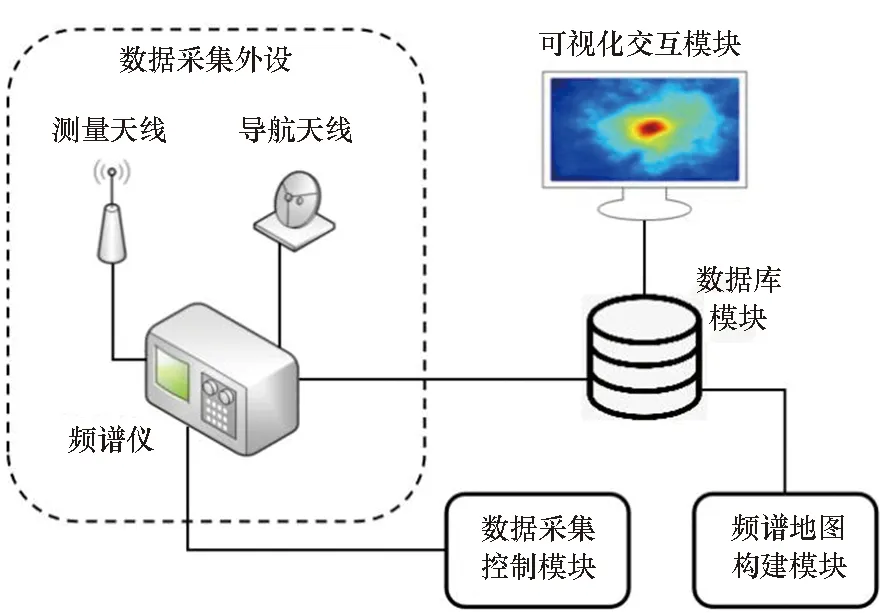
图5 电磁频谱地图验证系统组成Fig.5 Composition of spectrum map verification system
电磁频谱地图验证系统实物图如图6所示,为提升监测数据采集效率,图中将系统搭载于汽车平台。系统中的数据采集外设由频谱仪、导航天线和测量天线等部分构成。频谱仪采用Tektronix公司RSA507A便携式频谱分析仪,工作频率范围为9 kHz~7.5 GHz,实时分析带宽为40 MHz,内置标准GPS/北斗接收机获取监测数据位置信息。导航天线选用商用四星多频蝶形天线。测量天线根据所需监测频率范围进行选取。鉴于移动通信频段的电磁环境相对稳定,图5中使用工作频段为800~2 700 MHz的全向天线进行数据采集。系统软件部分采用BS架构,使用Java语言开发,各软件模块共用同一界面,如图6所示。

图6 电磁频谱地图验证系统实物图Fig.6 Thereal profile of spectrum map verification systems
选取长沙市星沙工业园某区域实地采集监测数据,区域尺寸约为2 km×2 km,便携式频谱分析仪频率范围设置为800~2 700 MHz。为使实测数据可整体、准确反映电磁频谱空间,数据采集点在感兴趣区域中应当尽可能地分散。因此,在实验数据采集过程中车速保持在20 km/h左右,每隔5 s存储接收功率与位置信息,图7中右下方为某一位置处的功率-频率图,水滴状符号为此次数据采集任务中所有监测数据的位置。通过对感兴趣区域的监测数据进行网格化处理,获得243个有效的监测数据,再随机选取一定数量的监测数据,使用本文所提方法构建电磁频谱地图,得到图7所示热力图。某一频率上,区域内的接收信号强度在-64~-28 dBm范围内,且不同位置的信号强弱可通过热力图颜色进行区分。

图7 系统软件界面与构建结果Fig.7 System software interface and construction result
3.2 算法性能对比分析
考虑到电磁态势生成等电磁频谱地图具体应用中,构建精度和构建速度是电磁频谱地图构建的关键,因此本部分选取均方误差(mean-square error, MSE)和构建时间作为评价指标,以OK方法作为参考方法,使用3.1节中实地采集的监测数据,通过十折交叉验证方式,与本文方法进行性能对比分析。
图8给出了不同监测数据量条件下本文方法与DIW、NN和OK方法的均方误差。可以看出:①四种方法的MSE都随着数据量的增大而减小。表明获取的监测数据越多,电磁频谱地图构建精度越高。②在相同的数据量条件下,本文方法的MSE均明显小于其余方法的,且本文方法与OK方法精度较为接近,但两者之间的差值随着数据量的增大而逐渐增大。这表明使用相同数量的监测数据构建电磁频谱地图,本文方法能获得较其余构建方法更高的构建精度,且随着监测数据的增多,本文方法在构建精度方面的优势更显著。

图8 不同监测数据量条件下的均方误差对比Fig.8 MSE comparison on conditions of different amount of monitoring data
由于路径衰减分量的存在,监测数据并不满足克里金法应用前提,相较于直接对监测数据应用克里金法的OK方法,本文方法仅对去除路径衰减分量影响的残差监测数据使用克里金法,更符合克里金法应用前提,因而实现了构建精度的提升。此外,监测数据越多,GRNN对于路径衰减趋势面的拟合效果越好,因而利用残差监测数据通过克里金法估计阴影衰落的效果也就越好,所以相较于OK方法,本文方法构建精度的提升更明显。上述结果说明,将电磁频谱地图构建分解为路径衰减和阴影衰落分量的估计,分别使用广义回归神经网络和克里金法进行拟合和求解,可提升构建精度。
由于构建精度是评价电磁频谱地图构建算法最重要的指标,且本文方法与OK方法相较其余两种方法构建精度更高,因此仅对本文方法和OK方法的时间成本进行对比。图9给出了不同监测数据量条件下本文方法与OK方法的时间成本。可以看出:①两种方法的时间成本均随着数据量的增大而增大。这表明参与计算的监测数据越多,电磁频谱地图构建速度越慢。②在相同的数据量条件下本文方法的时间成本均小于OK方法的,且两者之间的差值随着数据量的增大而逐渐增大。这表明使用相同数量的监测数据构建电磁频谱地图,本文方法能获得较OK方法更优的构建速度,且随着监测数据的增多,本文方法在构建速度方面的优势更显著。
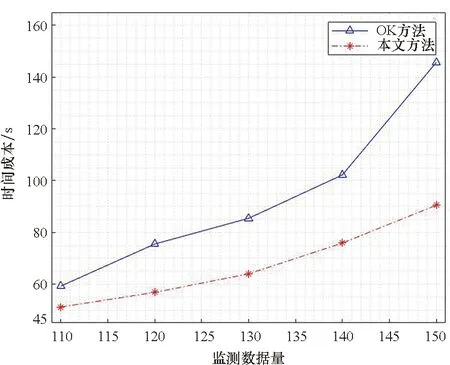
图9 不同监测数据量条件下的时间成本对比Fig.9 Time cost comparison on conditions of different amount of monitoring data
与OK方法使用所有监测数据不同,本文方法从监测数据的空间相关性出发,通过监测数据聚类和最优邻域选取,极大减少了参与克里金法计算的数据量,因而获得构建速度的提升。且随着监测数据量的增大,构建速度方面的提升更明显。上述结果说明,通过监测数据聚类和最优邻域选取可在保证构建精度的条件下提升构建速度,且式(12)所示最优邻域选取标准是合理有效的。
4 结论
针对电磁频谱地图高精度快速构建问题,本文提出基于广义回归神经网络拟合和聚类克里金的构建方法,通过趋势面拟合,将电磁频谱地图构建分解为路径衰减和阴影衰落分量的估计问题,以提升构建精度;设计监测数据聚类和自适应最优邻域选取机制,在保证构建精度的条件下减小计算数据量,以提升构建速度,从而利用数量有限的电磁环境监测数据,在不需要先验信息的条件下实现电磁频谱地图的准确、快速构建。设计并实现电磁频谱地图验证系统,搭建车载数据采集设备实测电磁环境监测数据,验证了所提方法的可行性及构建性能。
下一步将研究泛在感知条件下的电磁频谱地图构建,重点解决基于多精度监测数据的电磁频谱地图构建问题。
猜你喜欢
知识窗(2023年2期)2023-03-05
风流一代·经典文摘(2019年12期)2019-09-10
中国生物医学工程学报(2019年4期)2019-07-16
铁道通信信号(2019年11期)2019-05-21
读者(2018年24期)2018-12-04
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
知识窗(2017年3期)2017-03-09
振动工程学报(2015年1期)2015-03-01
全球定位系统(2015年4期)2015-02-28
电测与仪表(2014年3期)2014-04-04
