
基于STM32单片机+X7043的四轴伺服控制器设计
2023-06-17 08:39高聪
物联网技术 2023年6期
高 聪
(黄河水利职业技术学院,河南 开封 475000)
0 引 言
随着智能制造业的发展,传统意义上的运动控制系统难以满足当今数控加工行业的发展要求[1]。
传统的数控加工系统通常采用固定式的控制模式,并且控制系统稳定性差、出错率高、控制精度较低,一旦控制系统出现故障,难以维护,严重影响生产效率[2]。因此,研发一套具有高精度、高稳定性、高可靠性的伺服控制系统对智能制造领域具有重要的意义。
随着微电子技术和计算机技术的快速发展,运动控制系统逐渐趋于智能化、微型化、标准化等方向发展[3]。由于工业生产领域的自动化程度越来越高,采用专用运动控制芯片的微型化控制系统逐渐成为新的发展趋势。通过专用运动控制芯片发出控制脉冲,经过驱动器进行处理后送至伺服电机,完成伺服运动控制。这种微型化的运动控制模式已经在智能制造领域占据主导地位[4]。针对工业制造领域中传统运动控制系统稳定性差,控制精度低等问题,这里设计一种基于单片机+专用运动控制芯片的四轴伺服控制器。STM32 单片机采用STM32F412RE,专用运动控制芯片采用Kyopal 公司研发的X7043[5-6]。
1 硬件设计
1.1 系统结构设计
运动控制系统结构主要围绕STM32 单片机和四轴伺服运动控制芯片X7043 进行设计。其中,上位机可与STM32单片机进行直接通信,由上位机对STM32 处理器进行初始化设置和程序设计。STM32 单片机对运动控制芯片X7043的D0~D7 寄存器进行控制。运动控制芯片X7043 输出控制脉冲,并送至伺服驱动器。经过伺服驱动器处理过的控制脉冲送至伺服电机。伺服电机工作过程中通过位置检测部件将运动数据信号反馈至伺服驱动器,再由伺服驱动器送至运动控制芯片。这样就形成了一个闭环运动控制系统[7]。运动控制系统结构图如图1所示。
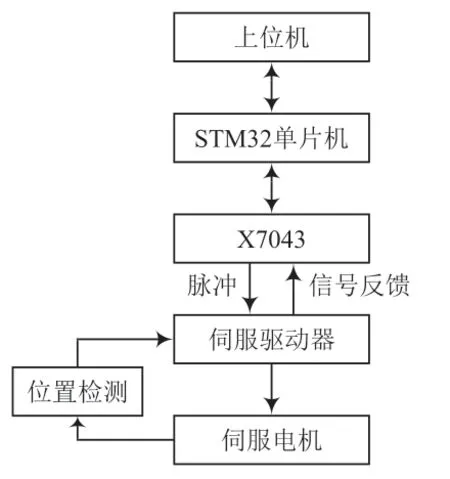
图1 运动控制系统结构图
运动控制系统STM32 处理器与运动控制芯片X7043 总线接口设计中,微处理器WR 引脚与X7043 芯片WR 引脚相连,实现STM32 处理器对X7043 芯片的参数设置功能;微处理器RD 引脚与X7043 芯片RD 引脚相连,实现STM32处理器对X7043 芯片的数据读取功能;微处理器A0~A4引脚与X7043 芯片A0~A4 引脚相连,实现STM32 处理器访问X7043 芯片各个地址对应的寄存器;微处理器D0~D7引脚与X7043 芯片D0~D7 引脚相连,实现STM32 处理器与X7043 芯片各种数据交换;微处理器RESET 引脚与X7043 芯片RESET 引脚相连,实现伺服控制器复位功能。STM32 单片机与X7043 总线接口设计如图2所示。
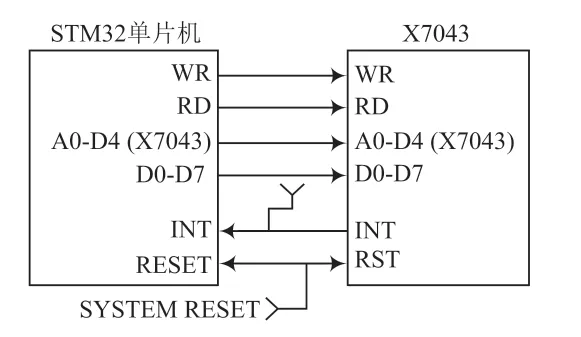
图2 STM32 单片机与X7043 总线接口设计
1.2 X7043 信号驱动电路设计
通过微控制器STM32 对X7043 的内部寄存器进行读写操作,可以实现四轴伺服运动控制。运动控制芯片X7043 控制脉冲输出引脚POUT 与驱动器CW/PULSE 引脚相连,实现控制脉冲驱动功能;X7043 引脚PDIR 与驱动器CCW/DIR引脚相连,实现伺服电机运动方向控制功能;X7043 引脚SON 与驱动器Servo ON 引脚相连,实现伺服使能控制功能;X7043 引脚CLR 与驱动器Reset 引脚相连,实现数据清零功能;X7043引脚INP与驱动器Positioning complete引脚相连,实现伺服定位功能;X7043 引脚ALM 与驱动器Alarm 引脚相连,实现伺服报警功能;X7043 引脚EA、EB、EZ 与驱动器Phase A、Phase B、Phase Z 引脚相连,实现伺服电机运动数据编码反馈功能。X7043 信号驱动电路设计框图如图3所示。
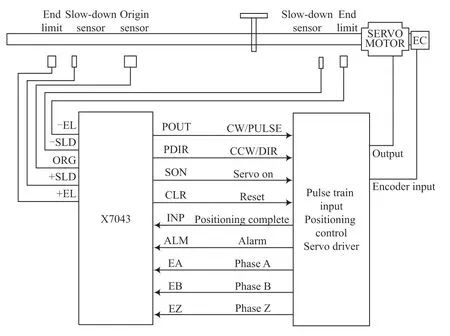
图3 X7043 信号驱动电路设计框图
1.3 电源电路设计
电路中主要用到的电源为5 V 和3.3 V。采用LM2596S-5 芯片提供5 V 电源,通过SPX1117M3-3.3 芯片提供3.3 V 电源。电源电路基本工作原理是首先对24 V 电源电压进行稳压处理。处理方式经过共模抑制电感电路进行稳压。输出的24 V 稳压电源通过LM2596S-5 芯片将24 V 电源转换为5 V 电源;然后再由SPX1117M3-3.3 芯片将5 V 电源转换成3.3 V 电源。电压电路原理图如图4所示。
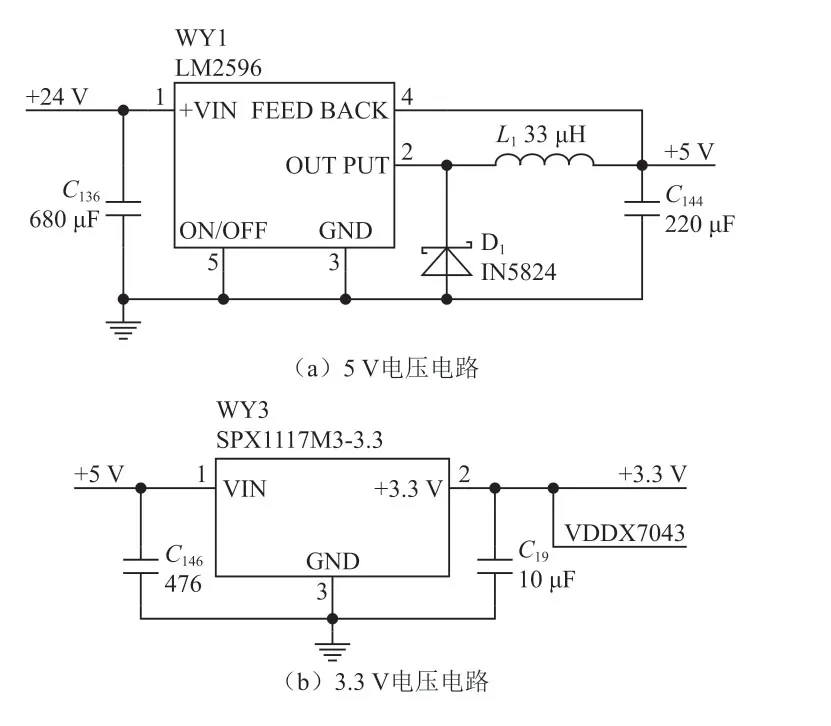
图4 电压电路原理图
1.4 减速停止/立即停止信号输入电路
微处理器通过对运动控制芯片X7043 内部寄存器进行读写操作,以控制X7043 输出控制脉冲,然后经由伺服驱动器放大后送至伺服电机。在这一控制信号传递过程中,为了实现电路安全可靠,在驱动器与伺服电机之间设计了光耦隔离电路和差分电路。伺服电机在运动过程中不断地将运动数据经过差分电路、光耦隔离电路送至运动控制芯片X7043 中。运动控制芯片X7043 在与外围电路的信号传递过程中均设置光耦隔离电路,以实现运动控制芯片的安全防护。
减速停止/立即停止信号主要为了完成伺服电机的减速和停止功能。其中专用运动控制芯片X7043 减速停止或立即停止信号输入引脚为+SLD、-SLD。减速停止/立即停止信号输入电路如图5所示。
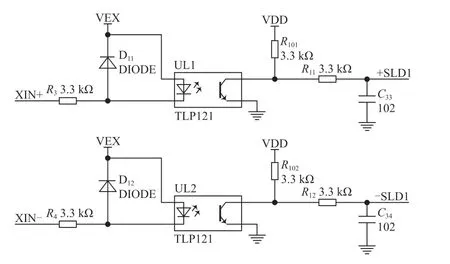
图5 减速停止/立即停止信号输入电路
1.5 急停信号输入电路
因为专用运动控制芯片X7043 的引脚中并没有专用急停信号输入引脚,这里采用另一种设计方案。在X7043 输出驱动脉冲信号后,会将驱动脉冲信号送至数字隔离电路,然后经过差分电路分两路送至伺服驱动器。因此在这个信号流程中的任何位置截断信号的传送即可实现急停的效果。本次急停电路将采用在差分芯片AM26LS31 处进行设计,即在其使能端引出信号,由控制使能端来实现脉冲的中断控制。急停信号输入接口电路如图6所示。
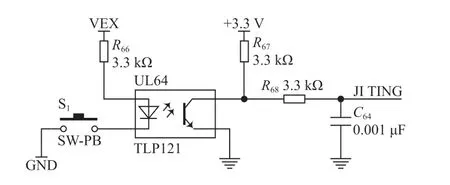
图6 急停信号输入接口电路
2 软件设计
2.1 运行模式设置
伺服控制器正常工作之前,要进行运行模式设置。首先对控制器进行上电操作,检查硬件电路是否正常工作。如果硬件电路出现故障,停止初始化设置;如果硬件电路正常,则依次对操作控制模式、计数器A/B 控制模式、CLR 输出控制模式、调用减速停止命令字、比较寄存器控制模式进行设置。运行模式设置流程图如图7所示。
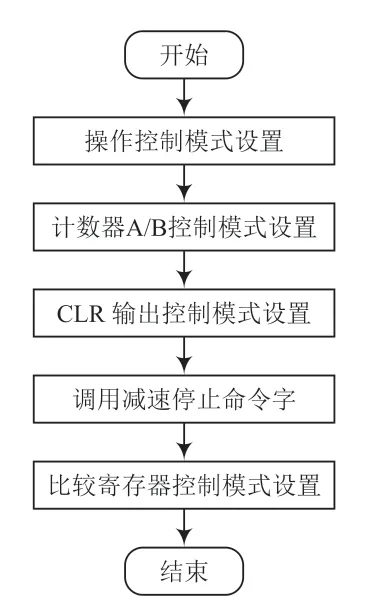
图7 运行模式设置流程
2.2 参数设置
控制器的参数设置主要是针对寄存器R1~R8 进行初始化设置。其中寄存器R1 为输出脉冲寄存器,用来设置输出的脉冲个数。该寄存器通常与预设计数器C 一起使用。如果输出脉冲中断,则剩余脉冲将寄存于计数器C 中,不需要重新设置输出脉冲寄存器。寄存器R2 为减速点寄存器,用来设置减速点,该功能支持手动模式。如果执行手动模式,则计数操作无效。寄存器R3 为启动频率寄存器,用来设置脉冲开始输出时频率参数和脉冲输出结束时频率参数。寄存器R4 为最大频率寄存器,用来设置脉冲最大频率。该寄存器支持多种运行模式下的脉冲最大频率设置,例如:线性运动速率变化、S 型运动速率变化和减速点速率变化等。寄存器模式包括自动模式和手动模式。寄存器R5 和寄存器R6 分别为加速率寄存器和减速率寄存器,用来设置加速率和减速率。通常情况下,寄存器R5 和寄存器R6 一起设置。该寄存器支持自动模式和手动模式,在减速点自动模式时,加速率和减速率应相同。寄存器R7 为S 型加/减速寄存器,该寄存器可根据实际情况决定是否设置。如果程序设计中不需要该功能,则不用设置;需要该功能时,在上电后予以设置。寄存器R8 为线性插补寄存器,用来设置多轴线性插补控制。该寄存器可根据程序功能决定是否设置,如果程序设计中不需要线性插补则不用设置;需要该功能时,则根据寄存器R1的值来设置寄存器R8 的值。
参数设置时,依次对倍频率、启动频率、最大频率、S 型加/减速、加速率、减速率进行设置。参数设置流程如图8所示。
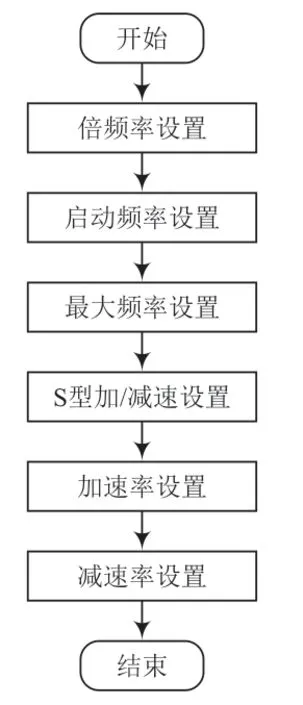
图8 参数设置流程
2.3 指数驱动
指数驱动设置首先进行初始化设置、控制模式设置、参数设置和输出脉冲数设置。初始化设置内容主要包括:输出脉冲、编码器、计数器、输入/输出、输入/输出逻辑电平、以及灵敏度等;控制模式设置内容主要包括:操作模式、计数器模式、CLR 模式、减速停止命令字、比较寄存器等;参数设置内容主要包括:倍频率、启动频率、最大频率、S 型加/减速、加速率、减速率等;输出脉冲数设置可根据程序功能进行设置。执行指数驱动过程中不断地读取运行状态,根据寄存器的操作完成标志位来判断下一步的操作。如果操作完成标志位为1,则重置操作完成标志位后,写入正方向驱动命令;如果操作完成标志位为0,则写入正方向驱动命令后重置操作完成标志位,直至指数驱动操作完成。指数驱动设置流程如图9所示。
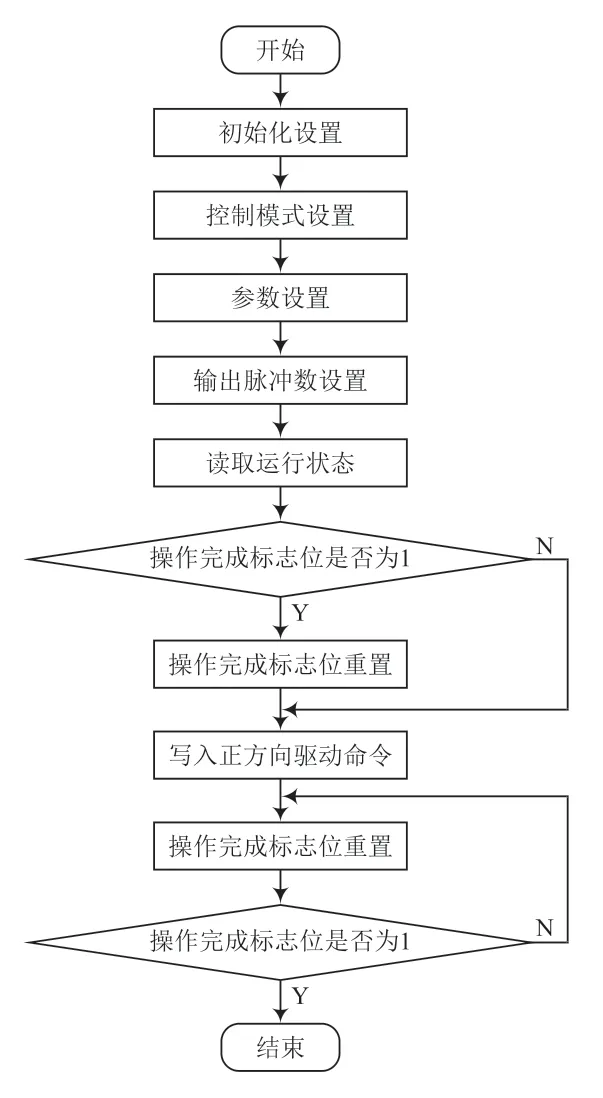
图9 指数驱动设置流程
2.4 连续插补
在伺服运动控制过程中往往会用到连续插补,连续插补设置是实现插补运动的基本操作。在连续插补过程中,通常采用顺序执行模式,例如:在连续插补设置时,首先写入第1节点数据和插补指令;然后判断寄存器RR0/D9 的数值,如果为1,则写入第2 节点数据和插补指令,以此类推。当有错误时,结束插补指令。连续插补设置流程如图10所示。
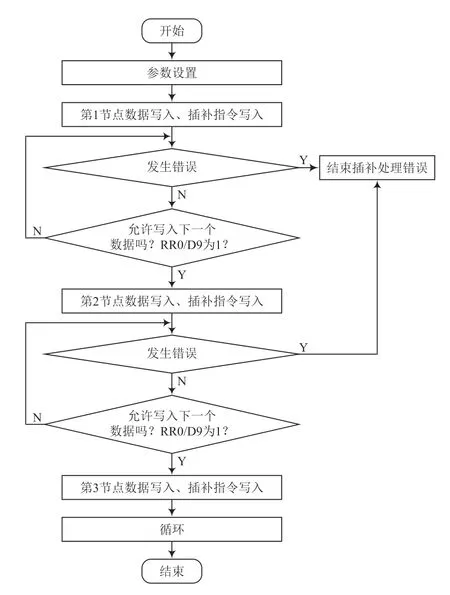
图10 连续插补设置流程
3 结 语
在该伺服运动控制器设计中,运动控制芯片选用Kyopal公司研发的X7043,它是一种四轴伺服运动控制专用芯片。本文设计以STM32F412RE 作为主控制芯片,以X7043 为运动控制处理芯片的微型伺服控制器。通过STM32 单片机对专用运动控制芯片X7043 进行读写操作,从而实现四轴伺服控制器设计。
猜你喜欢
微特电机(2020年11期)2020-12-30
计算机应用(2020年5期)2020-06-07
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
单片机与嵌入式系统应用(2017年7期)2017-07-31
光学精密工程(2016年5期)2016-11-07
上海电机学院学报(2015年3期)2015-02-28
计算物理(2014年2期)2014-03-11
网络安全与数据管理(2011年24期)2011-08-08
通信技术(2010年8期)2010-08-06
