
达芬奇手术机器人在Bismuth-Corlette Ⅰ、Ⅱ型肝门部胆管癌根治术中的应用初探索
2023-06-17 01:50董文杰杜羽升马红钦赵文星
腹腔镜外科杂志 2023年5期
董文杰,王 骥,杜羽升,刘 利,马红钦,赵文星
(徐州医科大学附属医院肝胆胰外科,江苏 徐州,221000)
肝门部胆管癌是指起源于肝总管、左右肝管及其汇合部胆管黏膜上皮的恶性肿瘤[1-2]。根治性手术是肝门部胆管癌公认最有效的治疗方法,但传统开腹手术对患者的创伤较大,限制了部分高龄、心肺功能较差患者的手术治疗[3-4]。近年,随着微创技术的发展与普及,国内外一些大的医疗中心开始探索腹腔镜肝门部胆管癌根治术,初期效果较为满意[5-13]。本团队一直致力于腹腔镜微创手术,在肝门部胆管癌的腹腔镜手术方面积累了相对丰富的经验[14-15]。但腹腔镜肝门部胆管癌手术的发展过程中遇到一些困难,如肝门部位置深在,解剖结构复杂,胆管毗邻肝动脉、门静脉及其主要分支,且肿瘤极易侵犯这些血管;同时腹腔镜手术缺乏纵深感,进行精细血管缝合及高位胆肠吻合时需要术者娴熟及稳定的操作技术,具有相当高的挑战性,这些因素均在一定程度上限制了腹腔镜手术的广泛推广。目前机器人手术技术正在蓬勃发展,其既保留了微创手术的优点,又在一定程度上弥补了腹腔镜手术的不足。自2019年本团队完成首例机器人辅助胃癌根治术以来,已相继开展了机器人辅助胰十二指肠切除术、中段胰切除术、胰体尾切除术、脾部分切除术等,在机器人技术的应用方面积累了一定经验。在此基础上本团队对机器人肝门部胆管癌根治术进行了初步探索,目前已完成6例,手术效果及近期疗效较为满意。现通过回顾总结6例患者的临床资料,初步探讨机器人肝门部胆管癌手术的可行性与安全性,以期为相关临床工作提供借鉴与帮助。
1 资料与方法
1.1 临床资料 回顾分析2021年7月至2022年4月徐州医科大学附属医院肝胆胰外科完成机器人辅助肝门部胆管癌手术患者的临床资料,依据纳入标准共入组6例,其中女2例,男4例,平均(66.00±18.38)岁,身体质量指数平均(24.45±4.15)kg/m2;术前合并糖尿病1例,均无腹部手术史,术前Child-Pugh分级A级3例、B级3例。本研究获得医院伦理委员会批准,并征得患者知情同意。入组标准:(1)术前经影像学、术中探查证实为肝门部胆管癌Bismuth-Corlette Ⅰ、Ⅱ型,并判断为可切除性肿瘤;(2)术前影像学检查未发现远处转移迹象;(3)无严重心、肺、脑、肾、肝等脏器功能不全,可耐受手术;(4)接受机器人肝门部胆管癌根治手术,并签署手术相关知情同意书。
1.2 手术方法 (1)体位选择与布孔:常规全身麻醉,患者取头高脚低大字位。使用第四代达芬奇机器人,机器人器械臂自右向左编号为1~4号,其中3号臂连接腹腔镜。脐下穿刺建立人工气腹后置入腹腔镜;在镜头直视下布孔,于右侧肋缘下腋前线偏外侧水平布孔连接1号臂,镜孔与1号臂孔连线的中点布孔连接2号臂,左侧肋缘下锁骨中线偏中线侧处布孔连接4号臂;助手操作孔位于脐部左上方(图1)。以上布孔方式需根据患者体型及手术方式调整。(2)腹腔探查:进镜后首先探查腹腔,常规按顺时针方向由上腹至盆腔再到上腹部的顺序,依次探查腹壁、肝脏、网膜及盆腔等,明确腹腔无种植转移。显露并适当解剖肝门板,大体确定肿瘤位置、大小、质地及周围淋巴结肿大情况,初步评估根治手术的可行性,确认后进一步手术。(3)淋巴结的清扫与肿瘤切除(图2A):超声刀沿胃小弯侧切开小网膜囊,显露胃左静脉,沿胃左静脉右侧清扫第3、5、7组淋巴结;然后沿胰腺上缘的肝总动脉清扫第8组淋巴结;显露肝固有动脉及胃十二指肠动脉,并沿肝固有动脉前壁切开肝十二指肠韧带前壁筋膜,裸化肝固有动脉,清扫门静脉左侧的第12组淋巴结。沿裸化的肝固有动脉继续游离,离断胃右动脉,裸化肝左动脉及肝右动脉;再次确定肿瘤可切除后沿胰腺上缘离断胆总管,远端封闭,切缘送快速冰冻病理,确认切缘阴性后,可顺利显露胆总管背侧并清扫该区域淋巴结。沿门静脉右侧壁解剖,直至门静脉后壁裸化,并将肝十二指肠韧带左侧区域的淋巴脂肪组织由门静脉后方拉至右侧,从而保证淋巴脂肪组织能与肿瘤一并完整切除。逆行将胆囊从胆囊床剥除,沿胆管向肝门部游离,至肿瘤上方最少1 cm离断左、右肝胆管及尾状叶胆管,同时一并切除胆管周围肝组织,完成肝门部胆管癌的根治性切除,胆管断端上切缘如有多个胆管开口(图2B),分别送检快速冰冻病理,待病理回报确认阴性后进行吻合。(4)肠肠吻合:标本装袋,充分冲洗手术野并确认无活动性出血。采用Roux-en-Y吻合术进行胆肠吻合,距屈氏韧带15~20 cm处离断空肠,逐支离断系膜血管,充分游离小肠系膜,距胆-肠吻合口40 cm与近端空肠残端通过腔镜下直线切割闭合器行小肠侧-侧吻合,以4-0倒刺线连续全层缝合关闭共同开口。(5)胆肠吻合(图2C、2D):空肠远侧残端经横结肠系膜无血管区提至肝门部,仔细检查肝门部胆管开口情况,对部分胆管开口行适当整形,根据整形后肝门胆管整体横断面直径确定吻合口的大小,在远侧空肠对系膜缘切开,根据胆管直径,较粗的胆管采用4-0倒刺线行胆管空肠连续全层缝合,较细小的胆管选用5-0 PDS吻合,以先后壁、再前壁的顺序进行。完成后关闭横结肠系膜裂孔,取出标本,再一次充分冲洗腹腔,确认术区无出血、吻合口无胆汁漏出,于胆肠吻合口后方置管引流。
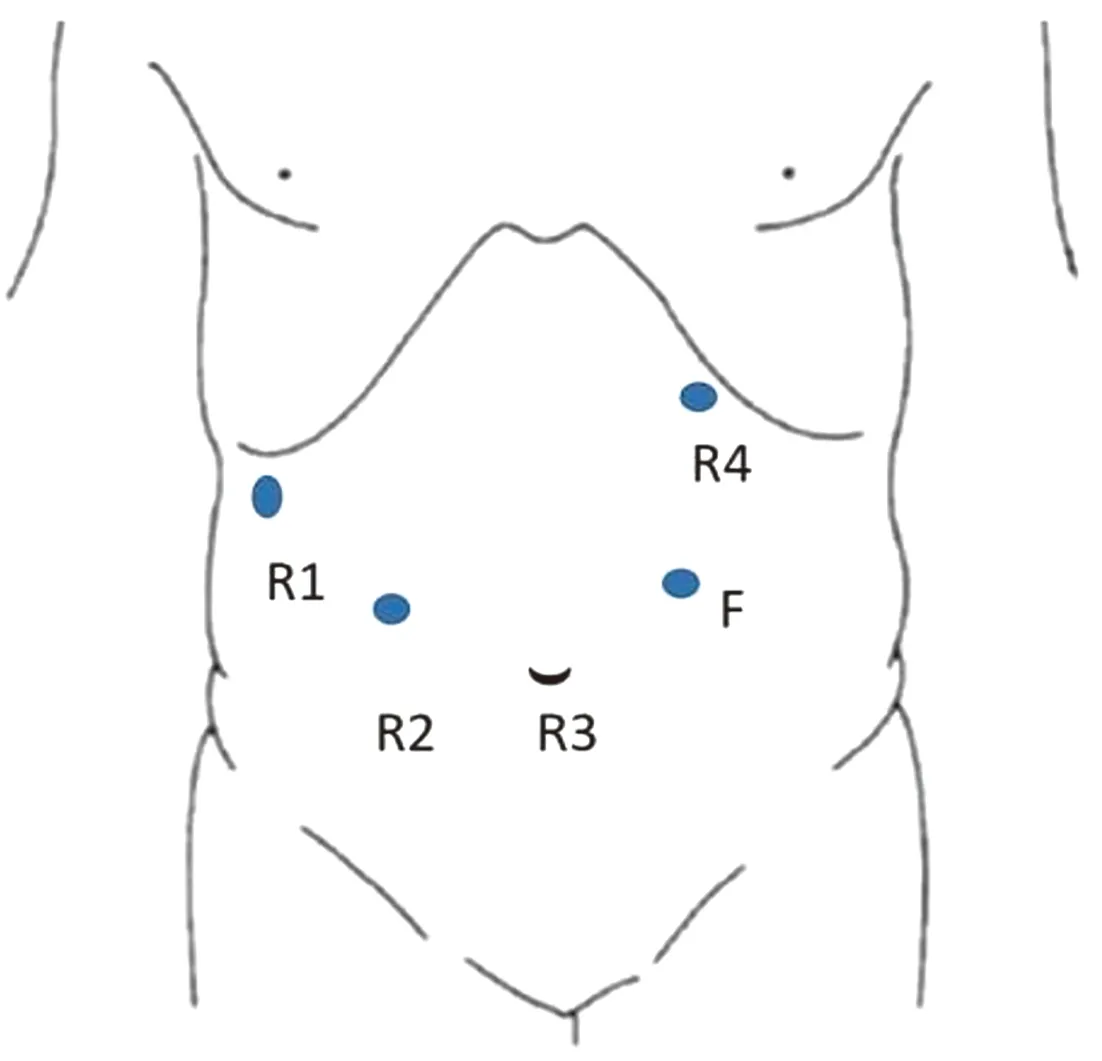
图1 机器人肝门部胆管癌Trocar布局(R1~R4:机械臂;F:辅助孔)

图2 腹腔镜肝门部胆管癌切除术中情况(A:清扫肝十二指肠韧带,该患者肝右动脉变异,起自肠系膜上动脉,PV:门静脉,RHA:右肝动脉,LHA:左肝动脉,GDA:胃十二指肠动脉;B:肿瘤切除后胆管残端开口;C:胆肠吻合;D:完成的胆肠吻合)
1.3 观察指标 统计术前生化指标、手术时间、术中出血量、术后首次肛门排气时间、术后住院时间、胆管肿瘤长径、淋巴结清扫数量、阳性淋巴结数量及术后相关并发症(出血、感染、腹腔积液、吻合口漏、心肺并发症等)。
2 结 果
6例患者均通过达芬奇机器人手术系统顺利完成肿瘤R0根治性切除术,其中Bismuth-Corlette分型Ⅰ型2例、Ⅱ型4例。手术方式均为围肝门切除+区域淋巴结清扫及神经丛廓清+胆管空肠Roux-en-Y吻合术,无一例中转开腹。手术时间平均(318.00±36.16)min,术中出血量120(100,225)mL,无术中输血病例。患者均于术后第1天下床活动并饮水,术后首次排气时间(4.33±1.15)d,术后平均住院(11.00±2.12)d,术后病理均证实为胆管腺癌,切缘均为阴性,平均清扫淋巴结(9.50±2.12)枚。术后1例患者出现反复高热,予以血培养、腹腔引流液培养及痰培养检查,血培养及引流液培养未见细菌,痰培养示肺炎克雷伯菌,考虑肺部感染,及时根据药敏结果更换敏感抗生素,同时予以雾化、拍背排痰,术后早期营养支持后好转出院;1例患者术后复查CT发现包裹性腹腔积液,予以穿刺引流后痊愈。无术后出血、围手术期死亡病例,未发生Clavien-Dindo外科手术并发症分级Ⅲa级以上严重并发症。随访7~12个月,中位随访时间9个月,其中4例患者接受放化疗等辅助治疗,随访至今,均无明显肿瘤复发转移。
3 讨 论
肝门部胆管癌具有特殊的生物学特性,恶性程度较高,对放化疗均不敏感,外科根治性切除是获得治愈的唯一方法。传统的开腹手术创伤大,术后恢复慢,且呼吸循环系统并发症发生率及围手术期死亡率相对较高,尤其对于基础情况较差的高龄患者风险更高[16-18]。
本团队自2016年4月起开展全腹腔镜肝门部胆管癌根治术,截至2022年4月已完成42例,取得了满意的临床疗效,我们体会到了微创手术的巨大优势,极大减轻了患者的疼痛程度,利于早期下床活动,减少静脉血栓的风险;减轻了咳痰的疼痛,使肺部感染的发生率降低;同时早期活动又进一步促进了胃肠蠕动及消化道功能的恢复,有助于术后快速恢复。这些优势已在我们既往的文章中提及,也得到了其他类似研究的证实[19-20]。
在不断的手术实践中,我们发现腹腔镜技术在肝门部胆管癌根治手术中也存在一定的局限性。首先镜下进行小范围操作时(如肝方叶切除、“哑铃状”肝叶切除),由于腹腔镜器械活动范围的限制[21-22],往往暴露不佳,难以实现最优位置的操作,这会导致“暴力、盲目”操作的发生,容易造成肝脏、血管的副损伤;其次,肿瘤侵犯门静脉、肝动脉血管需行血管重建、细小胆管吻合时,需要求进行大量精细的缝合打结等操作,有时处理紧急情况甚至需要单手缝合,这就需要术者具备强大的心理素质及娴熟的操作技术,而腹腔镜的杠杆效应往往会放大手臂的不稳定性,导致盲目不确切的缝合操作,并最终增加术后胆漏及出血的风险。
3.1 机器人手术的优势 机器人手术从微创手术方面而言,是腹腔镜手术的延伸,达芬奇机器人手术系统的器械臂装有类似手腕关节的具有7个自由度的机械腕,术者对操作手柄的操作被转换为器械臂末端同样的动作,消除了生理抖动的干扰,可在狭小的空间内进行各种方向的动作,克服了传统腹腔镜技术在缝合器械、技术方面的局限性,其精细操作及精细吻合的灵活性、稳定性、准确性均明显优于腹腔镜手术。此外,机器人系统采集的图像在主控台可产生三维立体图像,术野被放大10~20倍,精细解剖结构的辨认性更佳[23-24]。
3.2 机器人手术的可行性 笔者团队在进行机器人辅助肝门部胆管癌根治术前,已开展了大量机器人辅助肝胆胰及胃肠肿瘤的根治手术,其中不乏胰十二指肠切除等复杂手术,通过这些手术,对肝十二指肠韧带脉络化、胆肠吻合等手术难点已度过了学习曲线,并进行模块化应用,极大缩短了学习曲线。手术模块化理念是我们一直推崇与强调的外科重要理念。无论开腹、腹腔镜抑或机器人手术,均可将一个复杂手术根据解剖位置分解为多个操作模块,这些模块可借鉴于其他手术,也可通用于其他手术,如肝门部胆管癌手术对肝十二指肠韧带肝门区的解剖、清扫可借鉴胰十二指肠切除术。有目的、有计划地贯彻模块化理念并加以训练,无疑可有效缩短学习曲线,为开展机器人手术奠定良好基础。本组6例手术均达到R0切除的要求,同时淋巴结清扫数量平均(9.50±2.12)枚,能满足实现精准分期、判断癌变有无转移及预后的需要[25-31],与以往本团队报道的腹腔镜手术相当。
3.3 机器人手术的安全性 本组6例患者均在机器人辅助下顺利完成肝门部胆管癌根治术,手术时间平均(318.00±36.16)min,术中出血量120(100,225)mL,虽然较我们既往报道的腹腔镜根治手术的手术时间更长,但术中出血量有一定减少。我们认为出血量的减少与达芬奇机器人更加高清、三维立体的视野及灵活的操作有关,这使得解剖更加精细,对于肝门部清扫甚至能做到“白手术”。根据既往经验[32],随着达芬奇机器人学习曲线的度过,我们相信手术时间可达到与腹腔镜手术相同的水平。本组术后无出血、围手术期死亡病例,未发生心血管不良事件等严重并发症,仅1例患者出现术后肺部感染,1例患者出现术后腹腔积液,均经过保守治疗后顺利出院。相较同期国内大中心以Ⅱ型为主的机器人肝门部胆管癌根治术的案例报道,本研究中Clavien-Dindo外科手术并发症分级Ⅲ级以上术后并发症发生率无明显差异[33]。综上,机器人手术治疗Ⅰ、Ⅱ型肝门部胆管癌是安全、可行的。
3.4 问题与经验 机器人手术虽然改善了腹腔镜手术的部分难点,但同时也存在自身问题。首先头高脚低体位会造成肠道自然下垂,牵引器械的缺乏很难将消化道稳固在镜下理想位置;此外,机械臂连接并校正后,需有配套的手术床才可同步调整体位,这一昂贵配件很多医院未配置,术中如需调整体位,需断开所有机械臂,调整后再次连接校正,造成手术时间的浪费及手术连续性的中断。因此机器人手术对体位的调整应有所妥协,需要确定对手术核心操作最有利的体位,减少术中调整,这是机器人手术前必须考虑的内容。
机器人辅助肝门部胆管癌根治术是腹腔镜手术的延伸,开展初期应具备足够的技术储备及果断中转开腹或中转腹腔镜手术的决心,同时需要选择合适的患者进行充分的安全保障,我们认为,开展初期不宜选择Ⅲ型以上、需行血管重建的患者,随着技术的成熟可循序渐进。
我们初步认为,机器人肝门部胆管癌根治术是安全、可行的,近期临床效果满意,其灵活的操作、稳定性等优点对于腹腔镜肝门部胆管癌根治术是很好的补充,但需要选择合适的患者,同时术者需具备丰富的腹腔镜肝门部胆管癌手术及机器人手术经验。目前此术式仍处于探索阶段,完成的病例数较少,局限于Ⅰ型、Ⅱ型患者,相信随着手术的进一步完善,在保证安全性的条件下,我们能完成例数更多、适用范围更广的机器人肝门部胆管癌根治手术,为该手术提供更多的临床依据,同时给肝门部胆管癌的外科治疗提供新的思路与选择。
猜你喜欢
肝博士(2022年3期)2022-06-30
昆明医科大学学报(2021年10期)2021-12-02
现代临床医学(2021年5期)2021-11-02
昆明医科大学学报(2021年4期)2021-07-23
生物医学工程学进展(2018年1期)2018-03-26
河北医学(2016年5期)2016-12-01
中国现代医学杂志(2015年26期)2015-12-23
中国当代医药(2015年26期)2015-03-01
肝胆胰外科杂志(2015年4期)2015-02-27
中国中西医结合外科杂志(2013年3期)2013-03-11
