基于时空卷积注意力网络的道路速度预测研究
2023-06-22 19:14胡铮林杨曾秋霖舒泰武筱彬
现代信息科技 2023年5期
胡铮 林杨 曾秋霖 舒泰 武筱彬


摘 要:针对交通流数据建模时空特性挖掘不足的问题,提出了STGAN网络。运用时空图卷积和注意力机制挖掘道路网络时空规律。注意力机制使得网络对相邻道路和历史时间数据的关注度不同,其分组注意力卷积的机制能够使得网络训练摆脱路网空间拓扑规模的限制,并使模型可运用在较大规模的路网上。实验表明,STGAN模型在宁波高、快速路和主干路上速度预测误差比DCRNN小,在宁波数据集上预测速度表现出良好的精度。
关键词:公路运输;速度预测;时空依赖;注意力;图卷积
中图分类号:TP39;U495 文献标识码:A 文章编号:2096-4706(2023)05-0128-04
Research on Road Speed Prediction Based on Spatiotemporal Convolution Attention Network
—A Case Study of Ningbo's Main Road Network
HU Zheng, LIN Yang, ZENG Qiulin, SHU Tai, WU Xiaobin
(Ningbo Transportation Development Research Center, Ningbo 315042, China)
Abstract: STGAN network is proposed to solve the problem of insufficient mining of spatiotemporal characteristics of traffic flow data modeling. The spatiotemporal graph convolution and attention mechanism is used to mine the spatiotemporal laws of road network. The attention mechanism makes the network pay different attention to adjacent roads and historical time data. Its grouping attention convolution mechanism can make the network training get rid of the restriction of the spatial topological scale of the road network, and make the model can be applied to a large scale road network. The experiment shows that the STGAN model has a smaller speed prediction error than DCRNN in Ningbo high-speed, expressway and trunk roads, and the prediction speed shows good accuracy on Ningbo data set.
Keywords: road transportation; speed prediction; spatiotemporal dependence; attention; graph convolution
0 引 言
隨着机动车数量的快速增加,而城市路网承载能力有限,城市路网的扩张难以企及机动车数量的增加速度,道路交通管理已经成为当前城市治理的难题之一。在互联网技术和人工智能技术高度发达的今天,智能交通系统已被广泛应用于城市交通监测及治理[1],交通管理部门可以基于历史路网交通流数据预测得到未来时段的交通状况,预先进行交通资源分配或智能调度交通信号来对道路通行进行控制。出行者可以根据预测得到的路网交通状态来规划出行时间及出行方式,更好地进行路径规划。精确实时的交通流预测可以帮助改善交通堵塞、交通事故等一系列道路交通问题,对城市交通管理和综合治理水平的提高具有重要意义。
交通流数据具有明显的时间和空间的模式规律,国内外众多研究者针对交通流预测问题提出了多种预测方法,分别从交通流的时间特性、空间特性、时空依赖等多方面展开了深入研究,各自具有不同的优点及适用范围:
(1)时间序列模型。早在1975年时空相关性的概念就被提出,将时间序列计算模型延伸至空间领域,构建了时空序列分析模型框架,从而能够定量地测量时空依赖性。Moorthy将时间序列的移动平均自回归方法(ARMA)引入到交通流的预测当中,开启了ARMA预测的大门。
(2)统计方法模型。Asif [2]等考虑到研究时空特性可以改善智能交通系统的性能,提出了利用K-means挖掘路网层面和路段层面的时空性能趋势结合SVM对路网速度进行预测。李树彬[3]等通过层次聚类判定交通流状态,并结合相空间重构和XGBoost算法提出了一种短时交通流预测模型。
(3)深度学习。Yang等[4]使用特征增强的LSTM方法用于交通流量预测,以遏制单一特征长序列卷积导致的梯度下降问题。朱凯利等[5]基于图神经网络进行交通流量和速度预测,利用图卷积(GCN)捕获图的拓扑结构。Li等[6]引入扩散卷积神经网络(DCRNN)进行路网流量预测,基于图上的双向随机游走来捕获空间相关性,并使用具有预定采样的编码器-解码器架构来捕获时间相关性,在规模较大的路网下有效。Wu等[7]基于WaveNet网络预测时空交通流取得不错的效果。Rasaizadi等[8]使用人工神经网络和K-nearest邻居混合的模型预测预测小时交通量和每小时平均流量速度,根据结果敏感性分析后,得出影响K-nearest和预测精度的关键特征。
交通流受到路段状况、天气情况、人为活动等多种事件因素的影响,使得其具有高度的时变性、多模式性以及不确定性等特点,也增加了对交通流准确预测的难度。本文针对短时交通量受随机因素影响大、非线性强、时空规律多模态的特点,将时空卷积注意力网络应用于交通量预测的研究。
1 时空卷积注意力预测模型
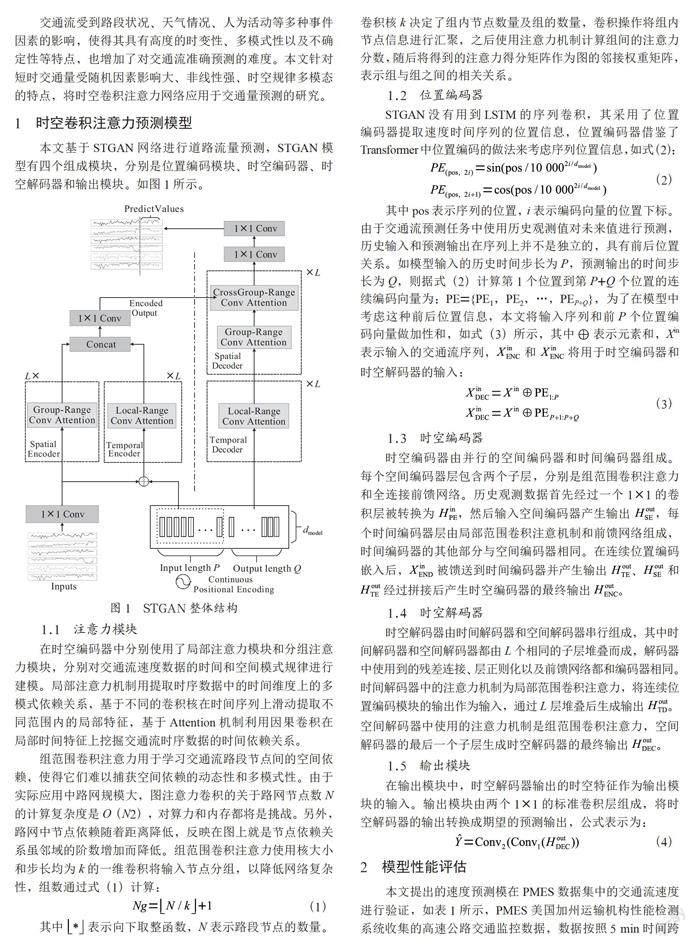
本文基于STGAN网络进行道路流量预测,STGAN模型有四个组成模块,分别是位置编码模块、时空编码器、时空解码器和输出模块。如图1所示。
1.1 注意力模块
在时空编码器中分别使用了局部注意力模块和分组注意力模块,分别对交通流速度数据的时间和空间模式规律进行建模。局部注意力机制用提取时序数据中的时间维度上的多模式依赖关系,基于不同的卷积核在时间序列上滑动提取不同范围内的局部特征,基于Attention机制利用因果卷积在局部时间特征上挖掘交通流时序数据的时间依赖关系。
组范围卷积注意力用于学习交通流路段节点间的空间依赖,使得它们难以捕获空间依赖的动态性和多模式性。由于实际应用中路网规模大,图注意力卷积的关于路网节点数N的计算复杂度是O(N2),对算力和内存都将是挑战。另外,路网中节点依赖随着距离降低,反映在图上就是节点依赖关系虽邻域的阶数增加而降低。组范围卷积注意力使用核大小和步长均为k的一维卷积将输入节点分组,以降低网络复杂性,组数通过式(1)计算:
(1)
其中 表示向下取整函数,N表示路段节点的数量。卷积核k决定了组内节点数量及组的数量,卷积操作将组内节点信息进行汇聚,之后使用注意力机制计算组间的注意力分数,随后将得到的注意力得分矩阵作为图的邻接权重矩阵,表示组与组之间的相关关系。
1.2 位置编码器
STGAN没有用到LSTM的序列卷积,其采用了位置编码器提取速度时间序列的位置信息,位置编码器借鉴了Transformer中位置编码的做法来考虑序列位置信息,如式(2):
(2)
其中pos表示序列的位置,i表示编码向量的位置下标。由于交通流预测任务中使用历史观测值对未来值进行预测,历史输入和预测输出在序列上并不是独立的,具有前后位置关系。如模型输入的历史时间步长为P,预测输出的时间步长为Q,则据式(2)计算第1个位置到第P+Q个位置的连续编码向量为:PE={PE1,PE2,…,PEP+Q},为了在模型中考虑这种前后位置信息,本文将输入序列和前P个位置编码向量做加性和,如式(3)所示,其中⊕表示元素和,Xin表示输入的交通流序列, 和 将用于时空编码器和时空解码器的输入:
(3)
1.3 时空编码器
时空编码器由并行的空间编码器和时间编码器组成。每个空间编码器层包含两个子层,分别是组范围卷积注意力和全连接前馈网络。历史观测数据首先经过一个1×1的卷积层被转换为 ,然后输入空间编码器产生输出 ,每个时间编码器层由局部范围卷积注意机制和前馈网络组成,时间编码器的其他部分与空间编码器相同。在连续位置编码嵌入后, 被馈送到时间编码器并产生输出 、 和 经过拼接后产生时空编码器的最终输出 。
1.4 时空解码器
时空解码器由时间解码器和空间解码器串行组成,其中时间解码器和空间解码器都由L个相同的子层堆叠而成,解码器中使用到的残差连接、层正则化以及前馈网络都和编码器相同。时间解码器中的注意力机制为局部范围卷积注意力,将连续位置编码模块的输出作为输入,通过L层堆叠后生成输出 。空间解码器中使用的注意力机制是组范围卷积注意力,空间解码器的最后一个子层生成时空解码器的最终输出 。
1.5 输出模块
在输出模块中,时空解码器输出的时空特征作为输出模块的输入。输出模块由两个1×1的标准卷積层组成,将时空解码器的输出转换成期望的预测输出,公式表示为:
(4)
2 模型性能评估
本文提出的速度预测模在PMES数据集中的交通流速度进行验证,如表1所示,PMES美国加州运输机构性能检测系统收集的高速公路交通监控数据,数据按照5 min时间跨度进行切片,分别记录了交通流量、平均速度和路段占用率,该数据集质量较高不存在数据缺失的问题。
2.1 模型试验设置
将PEMS数据集划分为70%训练集、30%验证集,本文使用Adam优化器搭配阈值为5的梯度裁剪来训练模型。初始学习率为0.001,权重衰减为0.000 1,并且在每个数据集上训练模型150个批次,PEMS04数据集batch size为32,PEMS07数据集batch size为16。为防止过拟合,采取drop out和earl stop在验证集上的损失连续10个批次没有减少时,停止训练,所有训练基于i9-9900K、RTX2080和128 GB内存的Windows平台进行。
如表2所示,PEMS04和PEMS07的输入输出步长均12,即用过去一个小时的而速度序列预测未来一个小时的速度序列。由于PEMS07道路数量多,组范围卷积数量调整为100,编码器和解码器堆叠层数设置为4,损失函数选择L1。
2.2 试验结果
本文将所实现的STGAN模型与以下基准模型进行比较,包括传统时间序列分析方法ARMA、时间序列深度学习预测方法FC-LSTM[4]、基于深度图神经网络的方法DCRNN[6]、WaveNet[7]等模型,模型评价指标选择RMSE和MAPE。由表3多步预测平均误差可知,相比FC-LSTM的序列卷积,时空卷积和图注意力机制对交通流的多模式时空建模更有效;加入transformer结构的STGAN比DCRNN在PMES-07数据集上表现更优,原因在于PMES-07相比节点数量PMES-04更多,时空关系更复杂,与此同时,分组卷积在减少计算量的同时,挖掘路网节点之间的时空相关性依赖也更有效。
在图2中的多步预测误差图中,随着预测步长的增加,FC-LSTM、DCRNN和STGAN预测误差都在增加,在PEMS-07上的增加速度大于PEMS-04,STGAN在多步预测中精度较高,误差上升速度慢于DCRNN。
3 宁波路网速度预测
为了验证STGAN网络在国内城市交通速度预测的实际应用效果,本文在宁波市高、快速路速度数据集(NB_expressway)和宁波主干道速度数据(NB_trunk_road)集上,训练STGAN模型并评估预测效果。
3.1 预测案例
宁波路网运行速度由浮动车GPS地图匹配与高德路况数据融合得到,每5 min计算一次全网道路运行速度,几乎覆盖宁波城区所有主要道路,宁波路网信息及数据采集时间如表4所示。
由于车流在路网中时空分布不均匀的天然属性,导致路网速度监控数据存在不同程度的缺失,高速数据缺失9.13%、快速路缺失14.82%、主干道缺失23.36%,缺失程度随道路等级降低而加重。根据历史速度数据分组统计得出宁波市道路运行速度均值如表5所示,针对速度缺失不严重的路段进行缺失值填补,以适当缓解速度缺失对预测模型训练及预测精度的影响。STGCN具体的训练参数设置如表6所示,由于主干道数量多,NB_trunk_road分组卷积数量设置为6,transformer编码解码结构设置为6,为降低显存压力,将批次大小调整为8。
3.2 预测效果
由表7知,STGAN模型在宁波高、快速路和主干路上速度预测误差比DCRNN小,在高、快速路上,预测误差低0.39%,在主干路上低0.84%。在图3多步预测误差图中,STGAN在NB_expressway和NB_trunk_road速度数据集上的预测误差均随着预测步长的增加,并且主干道误差上升明显快于高、快速路,表明STGAN对路况更加复杂的城市主干道交通流时空关系建模能力有所下降,STGAN在宁波高快速路和主干路的预测效果如图4所示。
4 结 论
本文提出的STGAN网络预测道路速度,在开放数据集上达到与主流标准模型一致水平的预测精度,其优势在于结合时空注意力机制时,使用局部注意力卷积和分组注意力卷积网络训练参数收敛速度快。另外,分组注意力卷积用于学习交通流路段节点间的空间依赖,使得网络捕获空间依赖的动态性和多模式性。在宁波实际道路速度预测场景中,误差比传统模型小,证明了模型的有效性;同时需要注意的是,在城市主干道速度预测中,由于路网结构复杂,道路数量多,易受交通信号限制,速度预测难度增加,模型存在预测精度下降的问题,下一步需投入更多精力解决此问题。
参考文献:
[1] 冉斌.世界智能交通进展与趋势 [J].中国公路,2018(14):22-23.
[2] ASIF M T,DAUWELS J,CHONG Y G,et al. Spatiotemporal Patterns in Large-Scale Traffic Speed Prediction [J].IEEE Transactions on Intelligent Transportation Systems,2014,15(2):794-804.
[3] 李树彬,孔祥科,李青桐,等.考虑混沌特性的PSR-XGBoost短期交通流预测(英文) [J].东南大学学报:英文版,2022,38(1):92-96.
[4] YANG B L,SUN S L,LI J Y,et al. Traffic flow prediction using LSTM with feature enhancement [J].Neurocomputing,2019,332:320-327.
[5] 朱凱利,朱海龙,刘靖宇,等.基于图卷积神经网络的交通流量预测 [J].智能计算机与应用,2019,9(6):168-170+177.
[6] LI Y G,YU R,SHAHABI C,et al. Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecastingg [J/OL]. arXiv:1707.01926 [cs.LG].[2022-09-28].https://arxiv.org/abs/1707.01926.
[7] WU Z H,PAN S R,LONG G D,et al. Graph WaveNet for Deep Spatial-Temporal Graph Modeling [J/OL]. arXiv:1906.00121 [cs.LG].[2022-09-29].https://arxiv.org/abs/1906.00121.
[8] RASAIZADI A,ARDESTANI A,SEYEDABRISHAMI S. Traffic management via traffic parameters prediction by using machine learning algorithms [J].IJHCM(International Journal of Human Capital Management),2021,6(1):57-68.
作者简介:胡睁(1985—),男,汉族,浙江宁波人,高级工程师,硕士,研究方向:交通信息化。
收稿日期:2022-10-20
基金项目:宁波市交通运输局科技项目(202117)
猜你喜欢
小雪花·成长指南(2022年1期)2022-04-09
甘肃教育(2020年22期)2020-04-13
益寿宝典(2018年5期)2018-10-22
传媒评论(2017年3期)2017-06-13
合作经济与科技(2017年2期)2017-01-03
科教导刊·电子版(2016年22期)2016-11-02
现代经济信息(2016年22期)2016-10-26
第二课堂(课外活动版)(2016年2期)2016-10-21
科教导刊·电子版(2016年20期)2016-10-20
商(2016年27期)2016-10-17