
基于空时滤波的多通道SAR抗欺骗干扰算法
2023-06-26 07:25王跃飞毛新华
雷达科学与技术 2023年2期
王跃飞,董 祺,毛新华
(1.南京航空航天大学雷达成像与微波光子技术教育部重点实验室,江苏南京 211106;2.北京控制与电子技术研究所,北京 100049)
0 引 言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种主动微波成像遥感设备,具有全天时、全天候和穿透力强等特点,可应用于环境监测、地形测绘和军事侦察等领域[1-5]。随着SAR技术不断成熟,SAR 目前已在军事领域中得到了广泛应用。然而,随着电磁环境的日益复杂,特别是在敌方干扰环境下,SAR 成像仍然面临很多挑战,因此如何保证在复杂干扰环境下仍能高精度鲁棒性成像是当前SAR研究的一个热点内容。
SAR 要有效地克服干扰影响,首先需要知己知彼。只有针对性地了解了干扰的特性,才能有效地抑制干扰。当前针对SAR 的干扰技术发展迅速,特别是数字射频存储器的发展,使得欺骗干扰信号从单一种类向复杂多变的方向发展[6-9]。相比噪声压制干扰,欺骗干扰通过截获SAR信号后进行调制并转发,从而在SAR成像结果中形成“真假难辨”的虚假目标;假目标和真实目标具有非常相似的散射特性,增加了干扰检测的难度,易导致对真实目标的误判,对SAR成像威胁性更大。如何有效的检测和抑制欺骗干扰是目前SAR成像系统面临的重要问题[10-11]。
目前SAR抗欺骗干扰方式主要有两类系统。一类是单通道SAR,其主要利用干扰机的调制转发延迟大于一个脉冲重复周期(Pulse Repetition Period,PRT)的特性,采用调频率捷变、随机初始相位等技术,破坏干扰信号的相干性,使其在图像上无法有效聚焦[12-14]。文献[15]利用干扰机转发延迟的特性,采用方位相位编码的方法将干扰信号退化为距离模糊信号,解码后的干扰信号偏离方位频谱支撑区,以此识别和抑制干扰;但是该方法对雷达信号的参数有着较高的要求。除了在发射端进行抗欺骗干扰,单通道SAR还可以在数据采集后建立的干扰和信号的模型,采用不同的成像处理方法分别提取干扰和信号的特征,利用其统计特性对干扰图像进行增强从而将虚假目标分离,并基于分离重构恢复真实目标场景[16]。
另一类是采用多通道或者多基地SAR系统,相比于单通道系统,多通道SAR具有更高的空域自由度,利用各个通道接收干扰信号和目标信号相位的差异,使用空域滤波的方法进行干扰抑制[17]。文献[18]提出了基于慢时间空时自适应处理(Space-Time Adaptive Process,STAP)的直达波欺骗干扰抑制方法,该方法采取增加通道数来提高信干比的方式,但是干扰能量仍然保留在图像中;对于散射波欺骗干扰则是提出了快时间STAP 与脉冲分集结合的方法,采用脉冲分集的方法区分干扰信号,随后采用快时间STAP 逐脉冲进行干扰抑制。文献[6,19-20]提出了多通道对消的欺骗干扰检测方法;利用干扰和信号在空域分布的差异分离干扰信号,但是没有给出后续的抗干扰方法。本文在文献[6]干扰检测方法基础上,做了进一步研究,探究干扰与真实信号的空时分布差异以及干扰抑制方法。基于多通道SAR 系统,针对直达波欺骗干扰,建立干扰信号和真实回波信号的模型。等间距选取其中三个通道,通过DPCA 方法对消静止场景目标,分离出干扰信号;分析表明对消后两个干扰信号之间存在固定的相位差,该相位差对应着干扰机的空间方位;因此采用沿航迹干涉方法可以估计出干扰机的空间位置。最后针对干扰与目标信号的空时二维分布差异,采用基于零点约束的最小二乘误差方向图合成方法设计空域滤波,联合多普勒滤波进行干扰抑制。本文方法基于真实回波和欺骗干扰之间的空时差异进行设计,可适用于多干扰机等复杂干扰环境,同时被假目标遮盖区域也可有效恢复。
1 多通道SAR信号与干扰模型
1.1 目标信号模型
假设多通道SAR工作在正侧视条带模式,其数据采集几何模型如图1所示,设SAR 合成孔径中心位于C点,雷达高度为h,以速度v沿X轴平行方向直线飞行;其N个天线m0,m1,…,mN-1沿雷达航迹等间距放置,相邻天线之间的距离为d;采用单发多收模式,其中,m0是发射和接收共用天线,其他均为接收天线。灰色区域表示SAR天线主瓣照射范围。

图1 多通道SAR数据采集模型
假设天线m0发射的信号为线性调频信号,其表达式为
式中,Tr为信号脉冲宽度,τ为快时间,f0为信号载频,Kr为调频率。对于场景中任意散射点A(x0,y0,0),天线mi接收到的回波信号经过I/Q 解调和距离压缩后可以写为
式中,t为慢时间,λ和c分别为波长和光速,Pr(·)和wa(·) 分别为距离向和方位向包络,tc为波束中心照射到A点时刻,R(t,i)为t时刻天线mi与目标点A的瞬时距离,其表达式可写为
式中,RB=,变量i对应第i个通道。将R(t,i)在t=0 处展开为二阶泰勒级数,同时忽略高阶项可得
式中,
设图1中∠ACB为θ,即向量与零多普勒平面的夹角,合成孔径中心与散射点A斜距CA设为Rc,且Rc=a0;因此式(5)中a1,a2表达式如下:
将式(6)代入式(4)可得
因此瞬时斜距R(t,i)和R(t,0)的差为
由于△r(t,i) ≪R(t,0),为推导方便,忽略各个天线对回波信号幅度加权的影响,即假设
因此,将式(8)和式(9)代入式(2)可以得到
在式(10)中,第二个复指数项是关于i的空域调制项;由于该项中存在关于t和i的耦合,可以通过乘以相位补偿函数的方式去除耦合项,相位补偿函数表达式为
式中θ0为雷达斜视角。在测绘带宽度远小于距离RB条件下,可以假设
将式(10)与式(11)相乘可得
由式(13)可知,exp(j2π/λsin(θ)di)是关于通道i的线性项,对应目标信号的空间位置。
1.2 欺骗干扰信号模型
对于直达波欺骗干扰,其原理是干扰机对截获的雷达信号进行存储,然后进行方位向与距离向的调制,最后发送给雷达,使得SAR 成像图中形成难以分辨的假目标。
如图2所示,干扰机位于点J(xj,yj,0),假设干扰机期望在A点处形成虚假点目标。Rj(t),0 与R(t,0)分别表示天线m0与干扰机和A点的瞬时斜距。

图2 欺骗干扰模型
设干扰机在J点位置截获到雷达的信号为S(τ,t),干扰机对截获的信号进行距离和方位调制,调制过程可以表示为
式中,Sj(τ,t)表示调制后的干扰信号,⊗为卷积运算,δ(·) 表示单位冲激函数,△rj(t)为调制因子,表达式为
因此,干扰机需要通过电子侦察的方式获取自身与SAR 的瞬时距离并且实时计算关于虚假目标的调制因子△rj(t),才能对SAR 造成有效的欺骗干扰。
将式(15)代入式(14),根据上一小节信号模型,多通道SAR接收到的干扰信号表达式为
式中,θj为图2中向量与零多普勒平面夹角。比较式(16)和式(13)可知,理想的干扰信号方位向和距离向调制和真实目标是完全一样的,在SAR 图像中难以区分。然而干扰信号是由干扰机发射,而非真实目标点散射的,所以干扰信号与目标信号的差异体现在信号到达雷达的角度,即波达角(Direction of Arrival,DOA)。
2 干扰检测与定位
上一节分析了目标信号和干扰信号模型,干扰信号和目标信号的差别在于通道间的相位差不同。对此,本节在多通道信号的基础上,通过DPCA 的方法将干扰分离出来并定位假目标位置,然后通过干涉处理估计干扰信号的DOA。
2.1 方法流程
干扰信号的检测和定位方法流程图如图3所示,该方法主要包括3个步骤。

图3 三通道假目标的检测和定位方法流程图
步骤1 等间隔选取3 个通道的回波数据,分别进行成像处理。
步骤2 对相邻通道的两个图像进行DPCA处理,将静止目标对消,保留虚假目标的图像。
步骤3 将步骤2 分离出来的两幅假目标图像进行空域干涉处理,估计出假目标位置处的相位差,而相位差则对应干扰信号的DOA。
2.2 基于DPCA的干扰分离
2.2.1 DPCA原理
DPCA 技术主要应用于地面动目标检测与定位,沿雷达运动方向设置多个等间距的天线,并且天线间距与脉冲重复频率(PRF)满足特定关系;利用通道回波之间的相干性,对各个通道进行校正与补偿后相减可以对消静止目标的信号。
DPCA 的原理如图4所示,其中实线白色三角表示天线0,其工作模式为收发共用,黑色三角表示只接收信号的天线1,虚线三角表示天线1的等效收发位置,位于天线0 与天线1 的中心。在第一个脉冲时刻,天线0 于该位置收发信号;那么在第m个脉冲时刻,天线1 等效收发位置与天线0 在第一个脉冲时刻的位置相同,所以对于静止目标,天线0 在第一个脉冲时刻接收的信号与天线1 在第m个脉冲时刻收到的信号是相同的,因而将天线1 的回波信号偏移m个脉冲时间则可以实现两个通道对齐,随后将通道校正后的回波相减,可以实现静止场景回波的对消。DPCA 的条件为

图4 DPCA原理图
式中,V为雷达运动速度,d为天线间距离,PRF为脉冲重复频率,Z+为正整数集合。
而对于直达波干扰信号,干扰机即便可以在同一脉冲时刻完成对雷达信号的调制转发,但是干扰信号到达雷达的方向与实际目标仍然存在差异,所以利用这一特性,通过DPCA 的方法可以实现对干扰的检测和分离。
2.2.2 干扰目标分离
将式(7)代入式(13)和式(16),进行距离徙动矫正(Range Cell Migration Correction,RCMC)后,目标和干扰信号的表达式分别为
式中Rc为合成孔径中心到目标点的距离。
随后采用Dechirp 的方法,将方位调制项的二次相位消除,达到方位脉冲压缩的目的;Dechirp的参考信号表达式为
根据式(12),将式(20)分别与式(18)和式(19)相乘,目标信号和干扰信号分别为
在上式中,方位调制项exp(j4π/λsin(θ)vt)是关于慢时间t的线性项,其线性系数为2vsin(θ)/λ,对应目标点的多普勒频率,只需对该项作傅里叶变换即可得到成像图。
为推导方便,将式(21)和式(22)的慢时间t离散化为
式中,n为慢时间t离散值。
在式(17)中,取m=1,则d=2V/PRF。将式(21)的目标信号经过DPCA处理后为
可见,目标回波信号经过DPCA 处理后实现对消。然而将式(22)的干扰信号经过DPCA 处理后,表达式为
根据式(25)可知,当θj≠θ时,干扰回波信号虽然幅度有所衰减,但是虚假目标仍然在图像中得以保留。但是,当干扰机和虚假目标位于同一方位位置时,即θj=θ,干扰对消结果也是0,DPCA 对消后干扰与真实目标都会消失,无法完成干扰的检测。
2.3 基于ATI的干扰信号DOA估计
通过DPCA 的方法分离出干扰信号后,如果直接采用“零陷”滤波,虽然可以去除干扰,但是该位置的真实场景也会损失。所以为了有效抑制虚假目标,同时尽可能保留真实场景,需要估计出干扰信号的DOA,即干扰机的方位。
根据式(25),选取i=1,2 两个通道的DPCA处理结果,对Ij(τ,n,1) 和Ij(τ,n,2) 做干涉处理得到
式中,conj(·) 表示共轭运算。根据式(26)的干涉相位可以估计出干扰信号的DOA:
式中,∠表示相位计算符号。
3 基于空时两维滤波的干扰抑制
在上一节中,通过三通道干扰检测方法,分离干扰信号并定位假目标位置,同时估计出干扰的空间位置。虽然干扰信号和真实回波信号在成像图中具有相同的散射特性,但是在空域有着不同的DOA,因此可以通过空域滤波的方法来抑制干扰。
3.1 空时级联滤波原理
根据式(21)可知,目标的多普勒频率fd=2vsin(θ)/λ是关于sin(θ)的一次函数,其斜率为2v/λ。目标和干扰信号的空时分布如图5所示,纵轴为多普勒频率,横轴为接收信号DOA 的正弦值;蓝色线条表示真实场景中目标点的空时二维分布,红色线条为虚假目标的空时分布,虽然干扰信号形成的假目标可以在多普勒域实现覆盖,难以区分;但是在SAR成像过程中,干扰机的位置是固定的,因而干扰信号的DOA 也是固定值,所以假目标的空时二维分布在图5中是竖直的直线。因此,可以采用多普勒域与空域级联滤波来抑制干扰。

图5 SAR真实目标回波与欺骗干扰空时分布
干扰抑制流程如图6所示,首先将每个通道的回波数据分别进行成像处理,得到真假目标混合的图像;基于干扰的先验信息,可以确定虚假目标在SAR 图像中的分布以及该虚假目标对应的干扰信号DOA,只需在图像中针对假目标范围逐点进行空域滤波即可去除假目标。

图6 干扰抑制流程图
3.2 基于零点约束的最小二乘方向图合成
由上一小节可知,对于覆盖在真实目标上的虚假目标,需要设计空域滤波器,在假目标处形成“零陷”,同时保证真实目标图像无失真通过。本节提出基于零点约束的最小二乘方向图合成方法来设计空域滤波器。
对多通道SAR 的N个通道构建空域导引矢量:
假设期望理想的接收波束方向图为
式中wd为期望方向图的权矢量。那么可以用第二个方向图来逼近式(29)的理想方向图,第二个方向图可以表示为
式中权矢量w应满足
式中θd和θj分别表示真实目标和假目标的DOA,在式(31)的约束条件下,来自θd方向的目标会无失真通过,而来自θj方向的干扰信号则会被抑制。那么,使期望波束方向图和约束方向图之间的二次误差最小,即可求得权矢量w的最优解。
根据式(31)的零点约束条件,可以定义约束矩阵为
其中θjk,k=1,2,…,K表示第k个干扰的DOA。
为了更有效地抑制干扰,对波束方向图的一阶导数设置零点约束:
那么一阶零点约束矩阵为
结合式(33)和式(35)的约束条件,最终的零点约束矩阵为
下面可以采用Lagrange算子来求解权矢量w的最优值。
步骤1 利用Lagrange 算子对变量G进行最小化求解
其中Λ为K×1的Lagrange算子矢量。
步骤2 对权矢量w求梯度,并将梯度值设为0,可得
步骤3 假设列矢量是线性独立的,所以CHC是非奇异的,则Lagrange算子Λ为
步骤4 将式(39)代入式(38)可得最优权矢量为
式中IN为N×N的单位矩阵。
4 仿真验证
为验证本文信号及干扰模型的准确性以及假目标检测和抑制的有效性,分别进行点目标干扰和面目标干扰仿真。单一点目标仿真用于验证干扰信号模型的准确性,同时定量分析干扰抑制算法的性能;面目标仿真则用于验证本文所提方法在复杂多变场景下的抗干扰性能。多通道SAR仿真参数如表1所示。

表1 关键仿真参数
4.1 点目标干扰
图7给出了点目标仿真结果,干扰机位于(600,0)位置,假目标点位于图像中心(0,0)处;为便于比较,将4 个真实点目标分别放置于(0,50),(50,0),(0,-50)和(-50,0)。图7(a)为被干扰后的成像结果,图7(b)为DPCA 对消后结果,可见场景中静止目标被对消干净,而假目标得以保留。图7(c)给出了空域干涉结果,其角度值表示干扰对应的空间位置。图7(d)为本文算法处理后的结果,可见中心位置的假目标得到抑制。图8(a)和图8(b)分别为干扰抑制前后的距离向和方位向的切片图,对于假目标中心的抑制效果接近-50 dB,同时真实点目标并无损失。

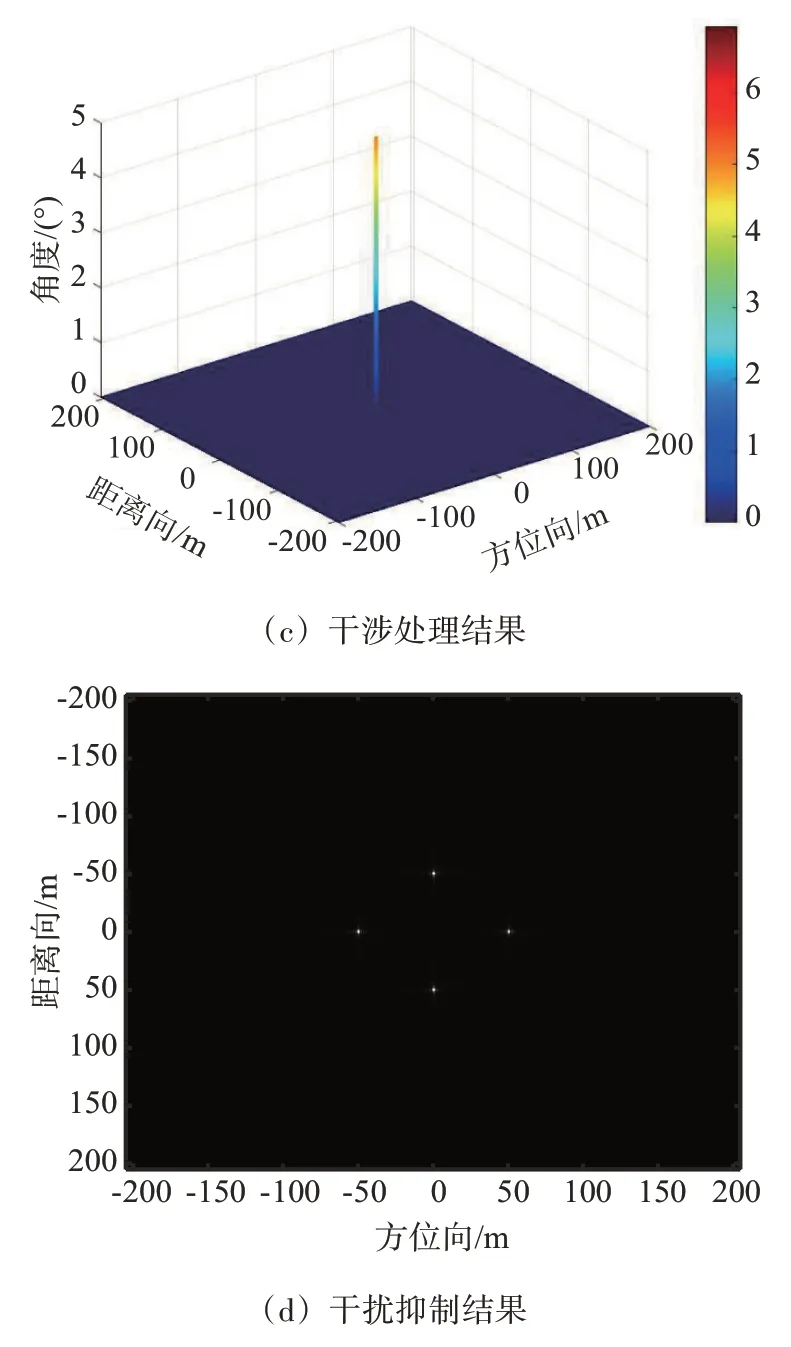
图7 点目标仿真结果

图8 点目标切片图
4.2 面目标干扰
面目标的仿真采用光学航拍图片作为多通道SAR 的静止场景输入。图9(a)为干扰机位于(800,0)处受干扰成像结果,其中虚假目标中心位于(25,25)处。图9(b)为DPCA 处理结果,可见场景中静止目标均被对消,而干扰目标被完整地分离出来;图9(c)为对虚假目标图像作干涉处理后的结果,估计出该虚假目标对应的DOA。图9(d)为多普勒域与空域联合滤波干扰抑制后的结果,可见虚假目标被完整去除,而被覆盖的真实场景也得到较好的恢复。


图9 面目标仿真结果
5 结束语
本文针对SAR欺骗干扰的检测与抑制问题,提出了基于多通道SAR 的欺骗干扰检测和抑制算法。该方法基于真实目标回波与欺骗干扰信号在空时二维分布的差异,充分利用多通道SAR充裕的空间自由度,采用DPCA 方法分离SAR 图像中的干扰信号,随后将干扰进行空域干涉处理估计出干扰空间位置,最后采用多普勒和空域级联的滤波方法,在假目标处形成零陷,实现假目标的抑制,同时不损失真实场景。点目标和面目标的仿真实验表明了本文所提算法的有效性。该算法优点在于可以有效检测并分离欺骗干扰,在抑制干扰的同时真实场景不会损失,能够有效抑制多干扰机的欺骗干扰。但是由于采用DPCA方法,当场景中存在运动目标的情况下,干扰检测的精度会受到影响;当干扰机位置与假目标位置靠近时,干扰抑制效果会下降。针对这些问题,进一步的研究可以围绕降低运动目标对干扰检测的影响以及借鉴认知雷达的原理在接收端阻隔干扰信号,以求达到更好的干扰抑制效果。
猜你喜欢
电气技术(2021年3期)2021-03-26
军民两用技术与产品(2021年10期)2021-03-16
通信电源技术(2020年22期)2020-03-27
航天电子对抗(2019年4期)2019-12-04
北京航空航天大学学报(2017年9期)2017-12-18
军事运筹与系统工程(2016年4期)2016-07-10
现代兵器(2016年6期)2016-06-25
西南交通大学学报(2016年4期)2016-06-15
海峡科技与产业(2016年3期)2016-05-17
工业设计(2016年6期)2016-04-17
