基于任务效用最大化的多雷达协同任务规划算法
2023-07-04 09:51刘辛雨孔令讲
雷达学报 2023年3期
袁 野 杨 剑 刘辛雨 易 伟 孔令讲
①(电子科技大学信息与通信工程学院 成都 611731)
②(火箭军工程大学导弹工程学院 西安 710025)
1 引言
利用空间上广域分布的多雷达节点协同工作,可从不同频段、不同时空、不同极化方式下充分挖掘探测目标雷达散射截面积(Radar Cross Section,RCS)的多样性[1–3],显著提升隐身、微弱等目标的探测性能。同时,多雷达系统分布式探测构型具备极强的抗干扰能力,在复杂电磁场景下拥有更强的生存力[4,5]。鉴于多雷达协同在探测和对抗方面的效能得益,围绕多雷达协同的相关研究逐渐成为当前雷达信号处理领域的前沿和热点问题。
随着相控阵、频控阵、数字阵列等雷达体制的出现和逐步成熟,多功能雷达的概念和相关研究也得以发展。多功能雷达能够通过调整其工作模式和工作参数实现不同的探测功能,以完成搜索、跟踪、确认、制导等多元化的作战任务,例如:相控阵雷达能够以边扫描边跟踪(Track While Scan,TWS)、搜索加跟踪(Track and Search,TAS)[6]两种不同模式实现不同数据率下的目标搜索和跟踪任务。在此背景下,如何保证多功能雷达系统在复杂多元化的任务场景中的适应性,以提升其任务执行效能(如雷达数据率[7]、探测威力[2]、跟踪精度[8,9]、低截获概率[10]等不同类型任务指标),成为当前多功能雷达、多雷达协同探测等领域研究的热门问题。围绕此需求,现有工作主要从雷达系统的多任务动态规划和资源优化调度两个角度展开相关问题研究。其中,多任务动态规划主要从宏观任务场景出发,解决多个探测任务如何在多个雷达间合理分配执行,或如何规化多个任务在单个雷达节点的执行先后顺序的问题,以提升多任务的综合执行效率[11](如雷达数据率、任务执行耗时等);相较而言,雷达系统资源优化调度则从微观的发射资源粒度级出发,旨在结合具体探测任务,通过优化雷达系统资源(如节点位置[12]、发射功率[13–16]、驻留时间[17,18]、工作带宽[19]等),以提升特定探测任务性能(如检测概率、定位误差、跟踪精度等)或达到预设的探测任务性能,最小化系统资源消耗。
多任务动态规划问题的核心在于如何实现雷达节点执行任务的合理、高效分配,并完成雷达节点任务执行线程的优化排布,以提升多任务的执行效率或尽量降低任务执行延迟。近年来,多任务动态规划也依托多功能雷达系统、相控阵雷达等,逐步完善了其相关理论算法研究[11,20–24]。朱希同等人[21]针对天波超视距雷达探测场景,提出了一种基于综合优先级最大化的雷达波位调度算法。根据任务属性和工作场景确定了任务的最终优先级,然后根据任务优先级完成了雷达波位扫描顺序的安排;围绕相控阵雷达任务分配场景,赵宇等人[22]提出了一种基于任务执行时间偏移最小的任务规划策略。通过最小化雷达的期望执行时间和实际执行时间偏移量与任务优化级的加权求和,相控阵雷达任务规划问题被建模成一个数学优化问题。赵宇等人随后分析了最优解存在条件,并给出最优解解析的求解方案;同样针对相控阵雷达多任务规划,展红英[23]结合了遗传和粒子群算法,实现了任务规划问题的求解。
上述研究证明了雷达任务动态分配算法在提升任务执行效率、降低执行等待延时等方面具有显著效果。但当前大部分多任务动态规划研究还基于单个雷达节点任务场景开展,鲜见针对一般化的多雷达、多任务场景的在线探测任务分配相关研究。而在多雷达场景下,任务动态规划算法除了需要解决原本单雷达场景下的任务执行线程优化排布问题,在此之前,还需要完成“探测任务-雷达节点”的优化分配,其对应的数学模型更为复杂,优化参量的维度也随之增加,是一个更复杂且更具挑战性的问题。而如前所述,多雷达协同是未来雷达目标探测形态的一种重要发展趋势。实际场景中,多雷达协同系统通常也需要同时执行多项探测任务。因此,如何在多雷达节点间完成多探测任务的合理分配规划成为雷达目标探测领域一个亟待解决的前沿问题。
本文针对多雷达协同场景下的多任务在线分配需求,提出了一种基于任务效用最大化的多雷达协同在线任务分配算法。以探测任务的性能和任务执行的等待时间分别构建了任务质量函数和任务效率函数,并以其加权求和完成了任务效用函数的建模;通过最大化任务效用函数,多雷达协同任务分配被建模成了一个整数规划的混合变量优化问题;随后,本文提出了两种算法,包括启发式贪婪算法和基于凸松弛的两步解耦算法(Convex Relaxationbased Two-Step Decoupling,CRTSD)实现了该问题的高效求解,相较而言,前者具备更快的计算效率而后者具备更高的优化精度;最后,通过仿真实验验证了提出方法的有效性。
2 多雷达协同任务分配系统模型
考虑多雷达系统协同执行多个探测任务的场景,系统中各节点以统一的时序周期工作,并在周期开始前进行协同任务分配,本文则主要解决多雷达系统单个周期探测任务的合理分配和执行问题。
在某一特定探测周期开始时,考虑由N(N>1)部雷达节点组成的协同探测系统收到Q个探测任务执行请求,每个任务所在的位置(xq,yq)(q=1,2,...,Q)各不相同。探测系统需要在每部雷达任务执行能力有限情况下,将这Q个探测任务优化分配给N部雷达执行,以实现多任务全局探测效能最优。
数学上讲,为表示任务-雷达的分配结果以及各部雷达对分配任务的执行顺序,定义Q=Perm{1,2,...,Q}为上述Q个任务序号的任一排列,则可以使用U|Q∈ZN×Q表示在特定任务排列 Q下,每个任务的分配结果:
为了更形象地解释任务排列 Q 和任务分配U|Q变量对整个任务分配结果的影响,图1给出了两部雷达分配5个任务的场景,其中任务1、任务2、任务4分配给雷达1执行,任务3、任务5分配给雷达2执行。可以发现,在两种不同的任务排列 Q情况下,即使任务分配结果U|Q相同,雷达执行任务顺序是不同的。因此,多雷达系统的任务分配和执行过程需要利用任务排列 Q 和任务分配U|Q两个变量表征。
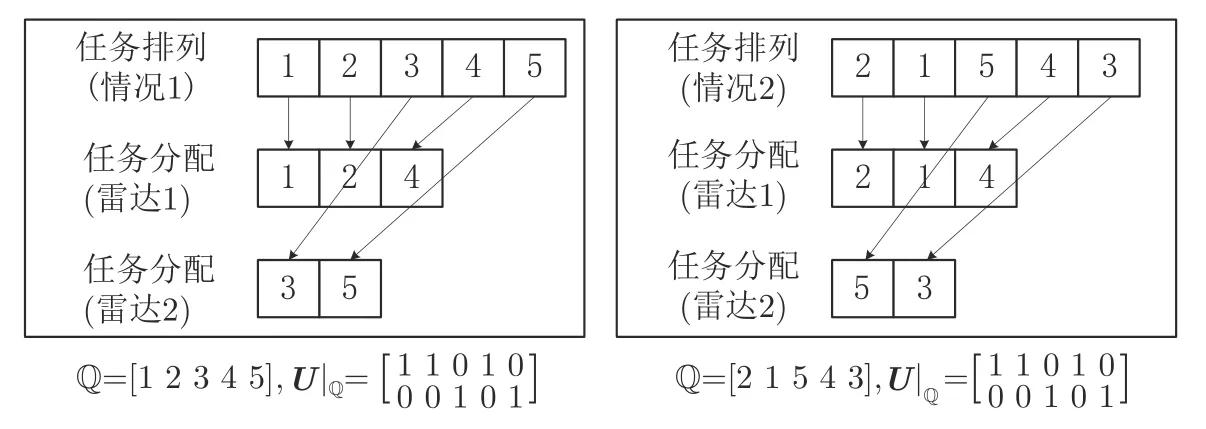
图1 任务排列与任务分配概念解释Fig.1 An illustration of the concepts for task arrangement and task scheduling
2.1 探测任务属性
多功能雷达通常需要执行目标搜索、跟踪、确认、制导等多类型任务[21],每项待执行任务通常拥有其任务重要性、执行代价、实时性要求等特征。在任务规划问题模型中,探测任务属性主要用于描述各项探测任务的上述特征,以满足多任务间多元化的探测资源需求。本文采用任务位置 (xq,yq)、任务重要性ρq和任务耗时tq来描述每项探测任务的基本属性。
其中,0≤ρq≤1表示第q个探测任务的重要性,任务重要性用于表征该项任务执行的优先级。优先级越高任务的重要性ρq值越大;tq表示第q个探测任务的执行耗时,表示承接该项任务时,雷达节点需要付出的探测资源代价。
2.2 多雷达任务分配模型
在N部雷达协同执行上述Q个探测任务时,每部雷达需消耗部分探测时间资源用于执行分配到的任务。考虑每部雷达的时间资源有限,此时存在以下雷达节点探测能力约束:
其中,t=[t1t2...tQ]T为任务执行耗时向量;tn,max为雷达节点n(n=1,2,...,N)的最大可用时间资源。为简化问题建模,本文假设一个探测任务同时只被一个雷达节点选取并执行1若要消除该假设,可通过将一个待执行任务q拆分成在同一个位置的多个子任务。例如:可将某项任务={(xq,yq),ρq,tq},拆分成 k个子任务,其中。。因此,单个任务被选中次数以及所有雷达执行任务的次数存在以下约束:
多雷达任务分配问题的本质就是在式(4)和式(5)的约束下,将Q个探测任务在线分配给N部雷达,同时每部雷达将分得的任务在其任务执行时间轴上进行优化排布,以使多任务执行的全局效能最大化。
图2给出了Q=8项具有不同优先级的任务分配给N=2部雷达的任务分配示意图,其中雷达1、雷达2分别分得了5项和3项任务,且在其各自的任务执行时间轴上把任务进行了执行顺序的排布。
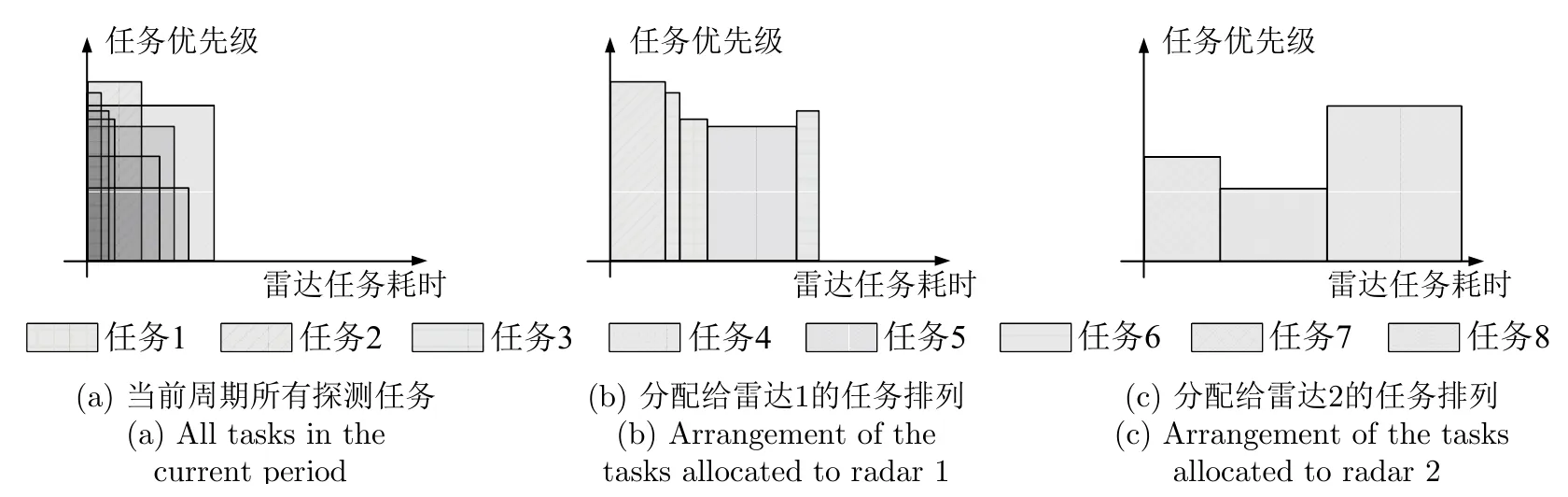
图2 任务规划示意图(N=2,Q=8)Fig.2 Schematic diagram of the task scheduling with N=2,Q=8
可以发现,由于不同任务拥有不同的属性,不同的任务分配和执行方案所带来的探测效能及资源使用代价通常不同。因此,本文要解答的问题就是如何将多个探测任务分配给各个雷达,以及分配后的任务如何排序,以实现多任务全局探测效能的最优。
3 多雷达协同任务分配效用函数模型
高效执行协同任务分配的前提是制定一个可评估任务执行效能的指标,并基于该指标实现多雷达协同任务分配。对此,本节提出了一种基于效用函数最大化的任务动态分配模型。首先基于任务质量(Quality of Service,QoS)框架[13],给出了一种多雷达协同任务分配全局效用函数的建模方案,然后基于构建的效用函数,将多雷达协同任务分配建模成一个数学优化问题;随后,利用任务执行距离、任务执行等待时间,完成了对提出的多任务动态分配模型的实例化。
3.1 多雷达协同任务分配全局效用函数及优化问题
本文基于QoS框架,将雷达的任务分配表示为关于效用函数最大化的数学优化问题:
其中,φq(Q,U|Q)为任务q的效用函数,表示在特定任务分配方案{Q,U|Q}下任务q的执行效能。上述优化问题被写成了Q个任务效用函数和对应任务重要性的加权求和,以表示多任务的全局任务效能。求解该优化问题后,问题的解即对应多任务的分配方案及其在各雷达节点间的执行顺序。考虑到大部分任务分配问题都主要关注任务优化分配后的任务性能和执行效率,因此,可将任务效用函数φq(Q,U|Q)进一步拆分成如下形式:
其中,ωq(U|Q)为任务q(q=1,2,...,Q)的归一化任务质量函数,用于表征特定任务分配方案{Q,U|Q}下该项任务能够获得的性能,质量函数值越大则表明任务执行所获得的性能越高;eq(U|Q)为任务q的归一化任务效率函数,用于表征该项任务的执行效率,任务效率函数可被建模成一个与雷达时间资源呈负相关的函数。
在实际的探测场景中,上述归一化任务质量函数和任务效率函数的具体表达式可根据特定的任务类型和目标进行针对性的定义。例如:针对目标检测任务,任务质量函数可被定义为与检测概率、虚警概率相关的函数[25];而针对目标跟踪任务,任务质量函数则可被定义为目标参数估计的后验克拉默-拉奥界(Posterior Cramér-Rao Lower Bound,PCRLB)相关函数,用于表征跟踪目标状态估计性能[26]。
3.2 基于任务-雷达距离指标的任务质量函数
考虑到包括上述提到的检测概率、跟踪PCRLB在内的大部分探测任务性能指标都与雷达接收信噪比(Signal to Noise Ratio,SNR)相关[27]。而根据雷达方程可知,当雷达节点的天线孔径、接收机灵敏度等参数固定时,其接收SNR主要受雷达和目标间的双程时延,即距离的4次方的影响。因此,不失一般性,本文提出了基于探测任务与雷达间距离的任务质量函数,定义如下:
3.3 基于等待时间指标的任务效率函数建模
本文以任务等待时间的倒数实现任务效率函数的建模,基于等待时间的任务效率函数定义如下:
其中,(·)[a:b]表示向量 (·)的第a到第b个元素构成的子向量,其中定义特殊情况 (·)[1:0]=0。的下标n*表示用于执行任务q的雷达节点序号:
式(9)表明在同一个雷达节点中,任务的执行效率与其等待时间成反比。当某个任务q排在雷达节点的第1个执行时,其任务效率函数值eq(U|Q)=1,若后续等待时间越长,则任务效率函数值越低。
一般的探测任务规划问题中,通常会有一个被执行的期待时间窗,在时间窗内执行该任务,则通常认为该任务的执行效率是满足要求的。而需要注意的是,本文是将多雷达的任务执行时间线周期化了,任务分配是针对某一个任务周期内出现的探测任务。因此,本文认为在单个任务周期内,所有需要分配的任务都是在其期待的执行时间窗内的。这种情况下,利用任务的等待时间对该周期内不同任务执行顺序优化,理论上可实现:(1)在任务数较少时,可在满足任务执行期待时间窗前提下,进一步提升多任务执行效率;(2)在任务数超过雷达执行能力时,可结合任务的优先级、任务耗时等因素给出一个综合的任务执行方案。
4 基于任务效用最大化的多雷达协同在线任务分配算法
4.1 基于任务效用最大化的任务分配优化问题
将式(8)和式(9)代入式(7)中,再将结果代回优化问题式(6),同时考虑雷达的能力约束,最终可将多雷达任务分配建模成如下数学优化问题:
该问题为一个关于整型变量U|Q和Q的离散优化问题。可以发现,不同的任务排列方式 Q会影响到任务分配变量U|Q的取值以及任务分配后各任务在对应雷达节点的执行顺序,不存在多项式时间复杂度的算法实现该问题的求解,因此,该优化问题是一个NP难问题[28]。
4.2 穷举搜索
针对优化问题式(11),最优的解法是对所有的任务分配和任务排序解空间进行穷举搜索。可对每个任务分配到每个雷达节点的情况进行穷举,再在任务分配特定的组合下,对各雷达节点内任务的排序进行并行排列计算,其伪代码如算法1所示。
下面对穷举搜索算法的时间复杂度进行分析,穷举搜索算法首先包括外部的Q层串行迭代,需要执行O(NQ)次循环;此外,在上述串行迭代内,需要对每个雷达分得的任务完成任务排序。任务排序计算可并行执行,此时对任一雷达最多需要执行=Q!次排列,因此穷举搜索算法最终的时间复杂度为O(NQQ!)。
可以发现,虽然穷举搜索算法遍历了任务分配所有可能的解,能够找到最优的任务分配结果,但由于任务规划问题的NP难特性,该最优算法的计算量巨大,时间复杂度随任务数量的增加呈指数乘以阶乘的水平增加。当任务数较多时,穷举搜索算法将导致计算的维度灾难。

算法1 穷举搜索算法Alg.1 Exhaustive search algorithm
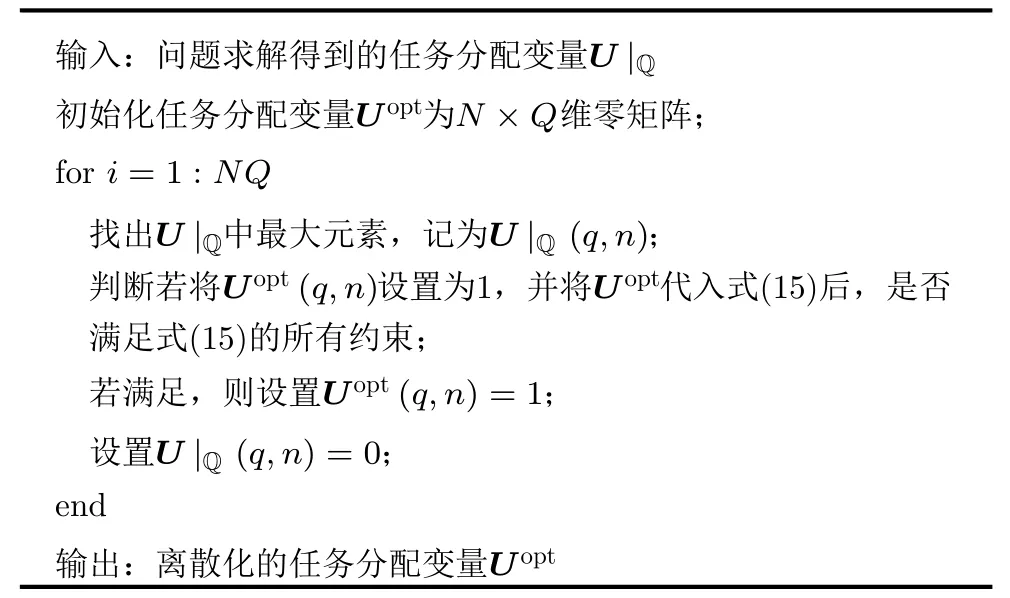
算法2 离散化任务分配变量Alg.2 Discretization of task scheduling variables

算法3 启发式贪婪算法Alg.3 Heuristic greedy search algorithm
4.3 基于凸松弛的两步解耦算法(CRTSD)
为了降低式(11)的求解复杂度,以满足在线任务分配的实时性要求,本文将提出一种次优的CRTSD求解算法,以实现在多项式时间复杂度内完成对问题的求解。
CRTSD将任务排列变量 Q与任务分配变量U|Q解耦,以实现问题降维,包含两个主要步骤。第1步是在特定的任务排列下,完成任务分配变量的确定;第2步则是在确定任务分配变量后,再次对各雷达节点分得的任务进行排序,以实现任务效用最大化。
4.3.1 基于任务重要性优先原则的任务排列
可以发现,由于雷达节点是在特定的任务排列Q 下,按照任务分配变量U|Q每一行从左至右依次执行分配任务的。因此,任务排列变量 Q会决定任务执行的先后顺序,并且与任务分配变量U|Q呈强耦合关系。考虑到重要性程度高的任务通常被期望尽快执行,因此,不妨先以任务重要性ρq对任务进行初始排列,从而得到任务排列变量 Q,并将其从优化问题中解耦。因此,任务排列变量 Q可表示为
式(13)依旧为一个离散非凸问题。为了进一步简化其求解,可以对其进行连续化的放缩,即将0-1变量放缩为一个0到1之间的连续变量。此外,在根据任务分配给各个雷达之后,任务执行效率eq(U|Q)可通过对雷达分得的任务进行排序而计算得到。此时,可将问题式(13)目标函数中的任务执行效率eq(U|Q)项省略,以降低问题求解的复杂度。因此,省略任务执行效率eq(U|Q)项后,优化问题式(13)可变为如下形式:
上述优化问题的等价形式可表示为
在经过多次放缩之后,式(15)为一个4次的凸优化问题,可通过常用的凸优化算法进行直接求解,本文采用CVX tools对其进行求解[29]。在求解优化问题式(15)后可确定连续的任务分配变量U|Q。接下来需要对其进行离散化,以得到最终的任务分配结果。实现离散化的算法如算法2所示。
4.3.2 任务执行顺序重排序
在确定任务分配变量Uopt后,可根据任务分配结果对任务执行顺序进行重排列,以进一步提升任务效能。将Uopt代入任务效用函数,可得到如下任务q的加权效用函数表达式:
为了明确每个任务在对应雷达中的执行顺序,这里定义如下函数:
最后{Qopt,Uopt}即为得到的任务分配问题的解,图3为CRTSD算法的流程图。
可以发现,由于CRTSD算法中存在凸松弛以及在任务排序时使用了启发式求解等手段,其问题的解并非最优。但本文会在后续仿真实验中通过与最优的穷举搜索算法对比来证明,CRTSD算法在大多数场景下都能找到令人满意的次优解。
下面对CRTSD算法的时间复杂度进行分析,CRTSD算法主要包括以下4个步骤:(1)任务重要性排序;(2)凸松弛;(3)离散化任务分配变量;(4)任务执行顺序重排序4个串行执行的模块。其中:步骤(1)和步骤(4)若采用最简单的冒泡排序算法,时间复杂度为O(NQ2);步骤(2)若采用等步长的梯度下降算法实现凸问题求解,则其时间复杂度为O(1/ε),其中ε为梯度下降算法的停止精度;步骤(3)需要执行O(NQ)次迭代。由于这4个步骤是串行执行的,CRTSD算法的总体复杂度为
可以发现,CRTSD算法可在多项式时间内完成问题求解,相比于穷举搜索算法的阶乘级复杂度,CRTSD算法时间复杂度可大为下降。
4.4 启发式贪婪搜索算法
除CRTSD算法外,本文还提供了一种次优的启发式算法用于实现任务的在线分配。该算法相较于CRTSD算法而言,其优化性能精度稍差,但在大规模问题中可具备更低的算法复杂度。主要基于贪婪的规则,包括以下两个步骤:(1)在tn,max的约束下,每个任务分给距离其最近的雷达节点执行,以实现任务分配;(2)完成任务分配后,每部雷达节点内的任务按照其重要性由高到低进行排序和执行。启发式贪婪算法的执行流程如算法3所示。
可以发现,若串行执行,启发式贪婪算法的复杂度仍旧在O(n3)。但相较于CRTSD算法而言,由于启发式贪婪算法各雷达节点任务排序部分相互独立,若采用并行执行的手段(如MATLAB中的parfor命令),则可将排序的复杂度降低,整体复杂度最低可降至O(n2)。因此,相比于穷举和CRTSD算法,启发式贪婪算法在大规模任务分配问题中可望拥有更低的时间复杂度。
5 仿真实验
本节将给出几组仿真场景,用以展示本文提出的启发式贪婪搜索算法、CRTSD算法的有效性。考虑如图4所示的探测场景:N=4部雷达完成对一个10 km×10 km方形区域的协同探测,为便于后续任务分配结果的对比,考虑这4部雷达分布在方形区域的4个角,坐标 (xn,yn)依次为(1 km,1 km),(9 km,1 km),(1 km,9 km)和(9 km,9 km),每部雷达的最大可用时间资源tn,max=10 s;Q个探测任务出现在该方形区域内,其位置(xq,yq)在10 km×10 km的方形区域均匀分布。类似地,每项任务重要性在λ到1 之间呈均匀分布ρq~U(λ,1),任务耗时在0到1 s之间呈均匀分布tq~U(0,1)。

图4 多雷达-多任务探测场景Fig.4 Task scenario of multiradar with multitask
5.1 不同算法性能比较
第1个场景如图4所示,为了便于展示任务分配的结果,考虑较少的任务数量,区域内存在Q=8个待分配任务,并将任务1到任务8根据其任务重要性由高到低进行排序,即对∀q>1,ρq-1>ρq,设置任务重要性分布相关参数λ=0.9。
图5和图6分别展示了穷举搜索、提出的CRTSD算法和启发式贪婪算法下任务分配以及任务排序的结果。为便于观察,图5中的两条点线将整个监视区域划分成了4块,划分后的每块区域分别对应距离这4部雷达最近的区域,雷达与任务存在连线表示该任务分配给该雷达节点执行。图6的每个阶梯表示单个任务执行的耗时。

图5 3种算法下的多雷达-多任务分配结果Fig.5 Multiradar-multitask scheduling results of the three algorithms

图6 3种算法下的各雷达分得的任务执行顺序排序结果Fig.6 The task execution order of each radar under the three algorithms
从图5可以发现,启发式贪婪算法和CRTSD算法中,在时间资源tn,max足够的情况下,都将任务分配给距离最近的雷达节点。考虑到雷达接收SNR主要受距离因素的影响,这是一种直观且合理的方案。相比之下,虽然最优的穷举搜索算法任务分配主要还是受距离因素的影响,但可以发现,在另外两种次优算法中分配给雷达3的任务3被分配给了距离其次近的雷达1。结合图6可以发现,这是由于次优算法中分给雷达3的任务3和任务8都需要消耗较大的时间资源,导致雷达3的任务响应效率较低。此时,穷举搜索将任务3分配给任务较少的雷达1,可以提升整体的任务效能。由此可知,最优的任务分配应当充分考虑任务探测性能和整体任务执行效率之间的权衡。
通过对比图6(b)和图6(c)可发现启发式贪婪算法只是按照任务的重要性由高到低对其进行执行顺序的安排。而从CRTSD算法对雷达2的任务安排可知,CRTSD算法会将执行耗时短的任务(任务7)优先执行,相比于启发式贪婪算法的安排,CRTSD算法在任务2执行效率稍微损失前提下,可显著降低任务6、任务7的执行等待时间,从而有望提升整体的任务执行效能。
图7和图8分别展示了不同任务数量Q下,3种算法得到的任务效用函数值和运行时间对比。其中,运行时间是在MATLAB 2022a软件平台、i7-11700K处理器、32GB内存硬件平台下得到的。由于穷举搜索算法涉及枚举Q个任务的全排列,MATLAB仿真软件仅支持生成=10!=3628800种排列情况,因此穷举搜索算法只给出了Q从1到10的情况。可以发现,CRTSD算法可获得显著高于启发式贪婪算法的任务效能,且在任务数量较少时与启发式贪婪算法拥有近似的计算时间。而在任务数量较大时,启发式贪婪算法拥有最快的执行时间。此外,虽然穷举搜索算法能够获得最好的任务效用值,但其计算时间是呈指数级增长的,在Q=10的情况下为302 s,约为CRTSD算法的600倍。同时可以预见,随目标数的增长,穷举搜索算法的计算时间将进一步恶化。

图7 不同任务数量Q下3种算法得到的任务效用值Fig.7 Task utility values of the three algorithms with different number of tasks Q

图8 不同任务数量Q下3种算法运行时间Fig.8 Runtime of the three algorithms with different number of tasks Q
5.2 复杂场景下提出算法的适应性
本节将给出更为复杂的任务分配场景,以体现本文提出算法在不同场景下的适应性。由于启发式贪婪搜索算法的任务分配结果与CRTSD算法类似,本文接下来主要展示CRTSD算法的任务分配结果。本节仿真实验中,考虑存在Q=40个任务待分配,其余参数与5.1节保持一致。主要考虑不同雷达探测构型以及不同任务重要性情况下任务分配结果的合理性及其自适应程度。
图9给出了N=4部雷达线性探测构型和不规则探测构型下对Q=40个探测任务的分配结果。其中,情况1下每部雷达的最大可用时间资源均为tn,max=10 s,情况2下雷达3的最大可用时间资源减少到t3,max=1 s。可以发现,在时间资源足够情况下(情况1),两种构型都倾向于将任务分配给距离其最近的节点,其中雷达3在两种构型下都被分配了最多的任务。当减少雷达3的可用时间资源至t3,max=1 s后(情况2),原本雷达3需要执行的任务同样按照距离远近被依次分配给了其余3个节点,这展示了本文提出的CRTSD算法在雷达节点变化情况下的适应性。

图9 不同探测构型下CRTSD算法任务分配结果Fig.9 Task scheduling results of CRTSD algorithm with different radar configurations
图10给出了在不同任务重要性参数分布下,40个任务的优先级ρq(q=1,2,...,40)以及CRTSD算法所得到的对应的任务效用值分布。可以发现,不同任务间的优先级差距越大,优先级越高的任务越倾向于获得更高的效用值。由此可见,CRTSD算法针对优先级的变化也能够给出合理的分配结果。同时,在实际应用场景中可通过增加某项重要任务的ρq值来保证其执行的性能和响应效率。

图10 不同任务优先级设置下CRTSD算法得到的任务效用值Fig.10 Task utility values of CRTSD algorithm with different task priorities
6 结语
本文针对多雷达协同探测场景下的多任务在线分配需求,提出了一种基于任务效用最大化的在线任务分配算法。该算法将多任务的执行效能建模成与任务-雷达节点分配结果相关的函数,通过最大化多任务的全局效能,把任务分配问题建模成一个离散整数规划问题;为求解得到的该离散高维优化问题,本文提出了启发式贪婪搜索和CRTSD算法,并在多项式时间内找到了问题的解。CRTSD算法具备更高的优化求解精度,而启发式贪婪算法具备相对较快的计算速度,使用者可根据所用平台的计算能力、实时性要求、任务分配规模等因素,综合权衡选择提出的优化算法。最后,通过仿真实验证明了提出的任务分配算法可动态适应探测任务性能、任务响应效率、任务重要性等参数变化,自适应地得到全局任务效能最大化的多任务多雷达分配方案。
此外,本文主要以探测性能和任务执行效率两个要素为例定义了多任务执行的效用函数。本文提出的任务分配框架还可根据特定的任务需求,进行多元化的拓展设计,可应用到更为广泛的多雷达多任务在线分配问题中。
猜你喜欢
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
中国生物医学工程学报(2019年6期)2019-07-16
中国惯性技术学报(2019年6期)2019-03-04
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
自动化学报(2016年3期)2016-08-23
电测与仪表(2016年5期)2016-04-22
火控雷达技术(2016年3期)2016-02-06
电测与仪表(2015年15期)2015-04-12
河北科技大学学报(2015年5期)2015-03-11
浙江理工大学学报(自然科学版)(2015年10期)2015-03-01