
BDS 快速钟差预报方法对比分析*
2023-07-05 05:48安景浩王怀智梁益丰许江宁
舰船电子工程 2023年3期
安景浩 王怀智 梁益丰 许江宁
(海军工程大学电气工程学院导航工程教研室 武汉 430033)
1 引言
全球卫星导航系统通过时间测量进行定位,精密时间频率是其正常运行、提供精确服务的基础保障,卫星原子钟钟差预报是实现高精度定位导航的重要前提[1~2]。目前,IGS 发起的MGEX 项目和iGMAS 中心为用户提供BDS 精密钟差产品,精度达到纳秒级,但存在滞后性,不能满足实时需求;其超快速产品预报部分实时性较好,但精度在3ns 以上,且不同类型卫星钟的预报精度差距较大[3]。因此,研究适用于BDS 卫星原子钟的钟差报方法,具有重要的意义和实用价值。
用于卫星钟差预报的多项式模型(Polynomial model,PM)及其拓展模型为代表的物理特性模型,以灰色系统模型GM(1,1)、求和自回归滑动平均模型(ARIMA)为代表的数据驱动模型,以支持向量机、极限学习机和人工神经网络为代表的机器学习模型[4]。由于卫星原子钟特性受到环境变化、周期运动、随机因素等多方面影响,以上模型均有其各自的适用范围和局限性:PM建模简单、短期预报效率较高,中长期预报效果较差;GM(1,1)适用于小数据量建模,适合中长期预报,对历史数据利用率不高;人工神经网络算法通常需要大量训练样本、容易陷入局部极小值[5~10]。
本文在分析原子钟钟差模型的基础上,首先介绍钟差预报中常用的多项式模型和灰色模型的原理及方法;然后根据指数平滑法的特点,尝试将指数平滑法应用于BDS 的钟差预报;最后,通过不同类型BDS卫星原子钟的快速钟差预报试验,对三类模型进行全面对比,以验证多项式模型和灰色模型的预报精度与特点,并分析总结指数平滑法在钟差预报中的性能和优缺点。
2 原子钟钟差模型与特征分析
一般卫星原子钟钟差模型可表示为式(1)[11]。其中,x0表示初始相位差、y0表示初始频率差、d为频漂值(对漂移率不明显的铯原子钟,d常取0),是钟差中趋势分量;由于导航卫星钟在太空受到转动、光照、温度等影响,其相位变化存在一定周期性,假设频差波动为标准正/余弦形式,易证在相位上表示为(A/2πf0)sin(2πf0+φ)|t0是钟差的周期分量;W1(t)、W2(s)是两个独立的维纳过程,代表两种起主导作用的原子钟噪声,是钟差的随机项部分。
以相位、频率、频漂三种参数组成的多项式模型是钟差的主要成分,周期项与噪声项通常为纳秒级,此外还有部分残余项。多项式模型常被应用于表示钟差近似物理模型,在短期预报中效果较好,但由于频率和频漂随时间不断变化,其中长期预报精度将明显发散;钟差的复杂特性也常被作为“部分信息已知、部分信息位置”的灰色系统,试验表明,在数据量有限或中长期预报情况下,灰色模型钟差预报性能优于多项式模型,但预报效果受原子钟性能的影响较大;指数平滑法是一种特殊的加权移动平均法,可充分利用先验信息,具有模型简单、计算方便的优点,因此曾被应用于GPS卫星原子钟的钟差预报,体现出较好性能[12]。
3 钟差预报模型
3.1 多项式模型
多项式模型常被应用于钟差预报中[13~15],基本表达式为
式中,x(ti)为ti时刻的钟差数据,a0,a1,a2,…,an是多项式参数,t0是参考历元时刻,ti是采样历元时刻,n为模型幂数,ε(i)为模型误差。
通常情况下,用于钟差预报的多项式模型参数有相位、频率、频漂三种,因此其幂次一般不超过两次(一次或者两次取决于原子钟是否存在比较明显的频漂)。
一次多项式模型(Linear Model,LM)表达式为
若已知m 个历元的钟差数据x(1) ,x(2) ,…,x(m),记t0=0,记:
根据最小二乘法,有:
解算出0、1两个参数后,即可对后续钟差进行预报:
二次多项式模型(Quadratic Polynomial Model,QPM)多一个参数a2(频率漂移率),其表达式为
类似的,记:
可以看出,一次多项式模型与二次多项式模型进行拟合和预报的原理基本一致,选取原则在于是否考虑卫星钟频率漂移率的影响。考虑到BDS 卫星原子钟包含铷/氢原子钟两种类型,因此在试验部分分别采用一次和二次多项式模型进行分析。
3.2 灰色模型
灰色模型(Grey Model,GM)最早由中国学者邓聚龙提出,一般用于对样本数少、规律特征不明显、信息不确定的灰色系统进行预报[16]。表示一阶单变量的灰色GM(1,1)模型的求解过程为
设原始钟差序列:
对y0(k)作一次累加生成新序列y1(k):
计算y1(k)的紧邻均值生成序列z1(k):
式中,a为发展系数,u为灰作用量。
分别记:
即可解得未知参量a和u。
对式(15)求导,得到微分方程:
求解微分方程,离散化,可得:
对上式作累减运算,得到GM(1,1)模型的预报公式:
式中,当k<n时为拟合,k≥n时为预报。
3.3 二次指数平滑法
指数平滑法是20世纪50年代末期由美国数学家布朗和霍尔特发展起来的一种时间序列分析方法,目前已在多个领域中得到应用[17]。这种方法在移动平均法的基础上,按数据的重要程度(主要考虑时间远近)呈非线性单调变化,其预测充分依靠自身历史数据,可以降低时序偶然性变动影响,进而寻找预测对象的变化特征和趋势,计算过程简单、方便。
基本指数平滑法以α(1-α)i为权重对时间序列{yt} 加权平均,0<α<1,i=0,1,2...,{yt} 的权重为α,{yt-1} 权重为α(1-α),{yt-2} 权重为α(1-α)2。预测过程中,指数平滑法不断用预测误差来纠正新的预测值,运用“误差反馈”原理提高预测的准确度,预测模型为
式中,{yt} 表示第t期实际值,是t+1 期预测值,分别表示第t-1 期和第t期的一次指数平滑值。α为平滑指数,代表对时序变化的反应速度,决定着预测中修正随机误差的能力。α值越小,平滑作用越强,但对实际数据的变动反应越迟缓。当α接近于零时,表示充分信任初始值,对当前观测值响应慢;当α接近于1 时,表示对当前观测值赋予更大权重,较少考虑历史信息。相应的,如时序变化平稳,则α取较小值,如时序变化剧烈,则α取较大值。二次指数平滑法在一次平滑法基础上再做一次指数平滑,预测模型为[17]
对比两种预测模型,当时间序列主要特征近似线性趋势时,如使用一次指数平滑法,时序中的滞后偏差将明显影响预测值,此时二次指数平滑法更能发掘滞后偏差规律。文献[12]正是利用二次指数平滑法对GPS钟差序列进行预测,得到了一些有益结论。但关于指数平滑法在BDS 卫星钟差预报方面的应用还缺少分析。
确定最优的平滑系数α是使用二次指数平滑进行钟差预报的关键,α值的选择是否合适,将直接影响预报的精度。一般来讲,对于接近平稳变化小的序列,应选择较小的平滑系数,而对于趋势明显变化大的序列,需选择较大的平滑系数[18]。本文将α在(0,1)区间内离散化,然后用穷举法遍历,寻找使误差均方根最小的α值,即为最优系数。
4 算例分析
4.1 数据来源与试验方案设计
数据来源于iGMAS 官网(www.igmas.org)发布的2022 年5 月1 日到8 日超快速钟差产品(6h 更新一次,采样间隔15min),随机选取C02、C06、C19、C27 四颗星载原子钟作为研究对象,包含MEO/IGSO/GEO 三种轨道类型、BDS-2/BDS-3 两种系统类型、铷/氢钟两种不同钟型,能够充分反映不同方法的预报特点。图1为四颗钟的原始钟差序列。
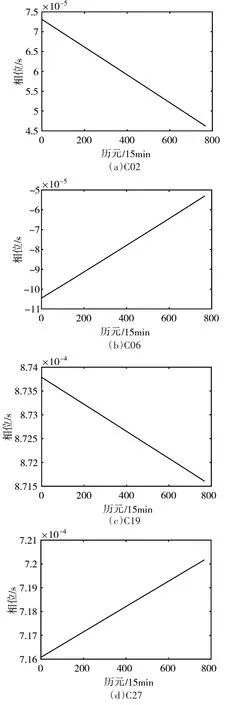
图1 四颗钟原始相位曲线

表1 四颗原子钟基本信息
为了能获得可靠的预报效果,客观反映钟差预报性能,一般需对原始数据进行预处理。主要是利用基于中位数的粗差探测法对原始数据进行粗差的探测与剔除,其基本思路是:将每一个待测量与该数列的中值加上MAD 的若干倍之和作比较,若待测量大,则被认定为粗差:
式中,m=Median(yi),是待测序列的中值,n的值需根据实际情况和反复试验去调整和确定,以求达到最好的效果,当观测量yi满足式(27)时,就认定其为异常值。需要注意的是,原始相位数据的异常值容易被绝对值较大的正常值淹没,因此这种方法通常应用在相对应的频率数据上。
具体试验方案设计如下:
1)根据预报模型不同,试验共分为三组:一次多项式模型与二次多项式模型、GM(1,1)模型、二次指数平滑法模型;
2)每组试验拟合时长均为24h,对四颗原子钟进行预报,预报时长设6h、12h、24h三种;
3)每组预报均选取不同的拟合区间进行7 次试验,最后结果取平均值。
4.2 钟差预报结果
计算四种模型对四颗钟进行不同预报时长的残差,并求残差的均方根平均值作为衡量预报精度的指标。以第一天试验为例,给出各类模型预报误差曲线如图2。
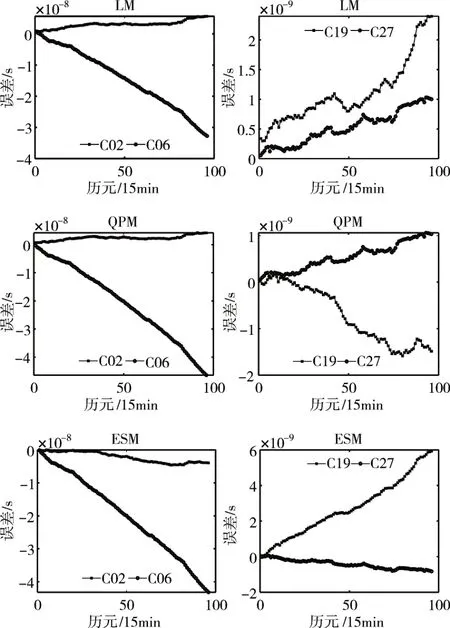
图2 预报误差曲线
从图2 可以看出,不论是哪种模型,对C19、C27 的预报误差都要明显小于对C02、C06 的预报误差,而相同系统的原子钟相比,C02 明显优于C06,C27要优于C19;通过误差曲线的趋势看出,这四种模型对各种钟的预报误差均有随预报时长发散的现象,而发散程度不尽相同。为了更具体地分析各模型的预报特点,将各类模型七次试验的预报误差均方根均值统计如表2所示。
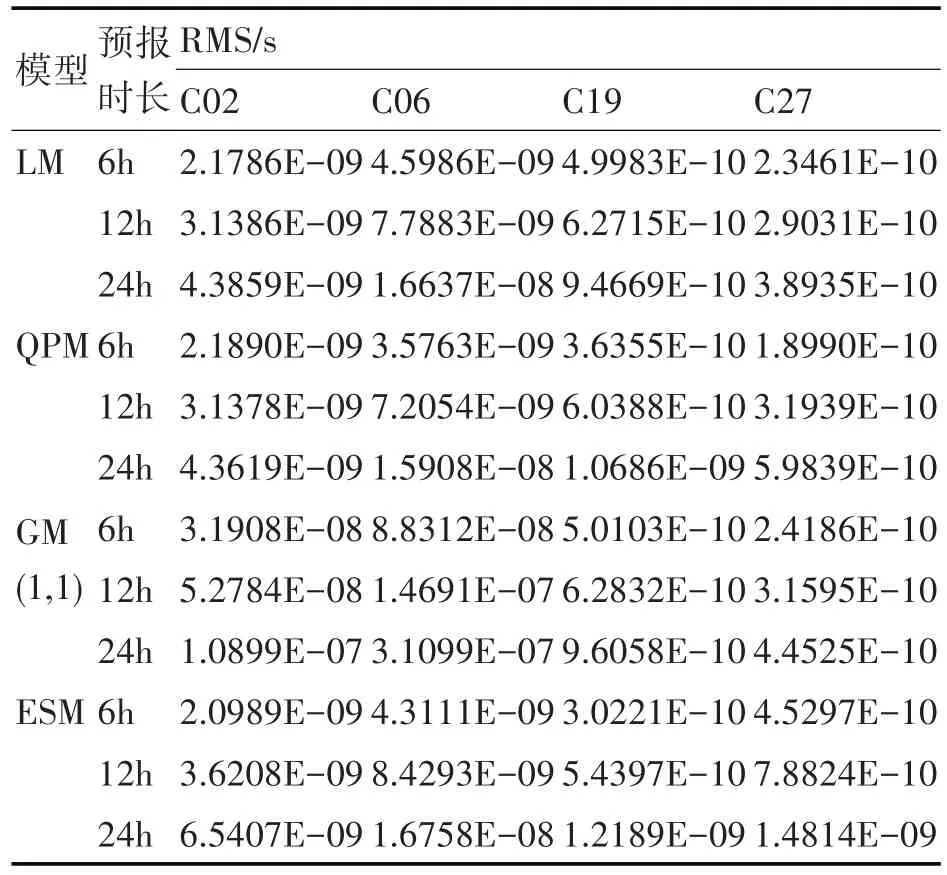
表2 预报精度指标
观察发现,在相同条件下,四种模型对C06 钟的预报误差大于其他钟。通过对C06 原子钟2022年5 月上旬的原始相位数据和频率数据分析发现,C06 存在明显的数据缺失和频率突变等情况,致使钟差数据质量不高,给精准预报带来困难。
从表中可看出,四种模型的预报精度与特点均有所不同:
1)LM 与QPM 的钟差预报效果较好,对C19、C27 的短期预报精度在1ns 内,对性能较差的BDS-2 星载原子钟(C02、C06),精度也在纳秒级;但随着预报时长增加,两者的预报误差均有增大的趋势。
2)GM(1,1)模型对C02、C06 的预报精度大于100ns,而对C19、C27 的预报精度在1ns 内,这体现了灰色模型受原子钟本身性能的影响较大的特点,GM(1,1)模型更适用于BDS-3星载原子钟。
3)使用ESM 进行钟差预报的精度也在纳秒级,同时误差也有随时间增长不断积累的趋势。
4.3 方法对比分析
上一小节中,通过设计算例和计算指标对各种模型短期/超短期钟差预报的精度和特点进行了分析与总结,本节将各种模型之间横向对比,分析各模型的优缺点与适用范围。
表3中给出各种模型对四颗原子钟七次24h预报的RMS均值,可以总结得到如下结论:
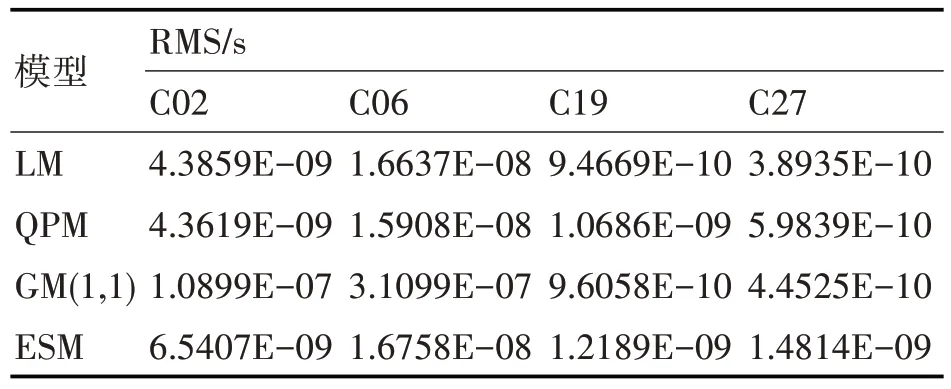
表3 四种模型24h预报精度对比
1)从指标看出,无论是哪种模型,对BDS-3 星载钟(C19、C27)的预报精度都要优于于BDS-2 原子钟(C02、C06),说明原子钟本身的性能是影响预报效果的重要因素之一;
2)LM、QPM 作为基于原子钟物理特性的预报模型,不论是对BDS-2 还是BDS-3,在短期内都能取得较好的预报精度,一般来讲,QPM 的预报效果要略优于LM(相差在1ns 内)。但当原子钟没有明显的频漂特性(如C27 搭载的H 原子钟)时,LM 会优于QPM;
3)GM(1,1)模型对C02、C06 的预报残差远大于其他三种模型,而对C19、C27的预报精度基本与LM 相当,还要优于QPM 和ESM,这充分体现了GM(1,1)模型受原子钟本身性能影响较大的特点,该模型更适用于对本身性能较好的钟进行预报;
4)当使用ESM 对C02、C06 进行预报时,精度与多项式模型基本相当,而当对性能较好的C19、C27 预报时,其预报效果稍微落后。作为一种简洁的预报方法,其对BDS卫星原子钟的中长期预报能力还有待进一步试验分析。
5 结语
通过以上算例计算与对比分析,可以得到以下结论:
1)综合看,超短期(6h)预报的精度好于短期(12h、24h)预报精度,对BDS-3 原子钟的预报优于对BDS-2 原子钟的预报;对不同轨道、类型的原子钟,最优的预报模型往往不同。
2)多项式模型中,一次多项式模型和二次多项式模型的预报精度相差不大,一般LM 适用于频漂不明显的H 钟,QPM 适用于频漂较明显的Rb 钟;GM(1,1)模型的预报精度受原子钟本身性能的影响较明显,对本身性能较好的原子钟,GM(1,1)模型能取得较好的效果;ESM作为一种特殊的加权移动平均法,能够利用到所有的先验信息,因此对钟差数据较不稳定的BDS-2 星载钟能取得相对不错的精度。
3)综合来看,对于不同系统和类型的原子钟,适用的预报模型也不相同,因此在实际应用中,需结合卫星钟选择适用的一种/多种模型。
猜你喜欢
军民两用技术与产品(2021年10期)2021-11-25
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
科学家(2019年3期)2019-08-18
导航定位学报(2018年3期)2018-09-03
电子测试(2018年11期)2018-06-26
载人航天(2016年4期)2016-12-01
科学与财富(2016年28期)2016-10-14
水利科技与经济(2016年9期)2016-04-22
测绘科学与工程(2016年6期)2016-04-17
测绘科学与工程(2014年2期)2014-02-27
