农机深松整地作业监测系统的设计
2023-07-21 10:36庞国红
南方农机 2023年15期
庞国红
(昌图县亮中桥镇农业综合服务中心,辽宁 铁岭 112524)
农机深松整地作业能够打破犁底层,使松土层加厚,对耕层结构进行改善,以此使土壤蓄水保墒能力得到增强,对土壤进行改善,实现农作物的增产。深松作业的原则为先作业后补助,利用各地方的农机管理机构工作人员监管农机深松作业量。但是,传统作业监管是通过人工测量,增加了工作量,监测覆盖面比较窄。农机深松作业远程监测系统综合无线通信技术、卫星定位技术、计算机测控技术等,能够对作业面积和深松作业质量进行检测,以此为深松作业的补助提供基础[1]。
1 系统的设计原理
农机深松整地作业监测系统将移动通信、地块矢量图层、卫星遥感技术等作为基础,本文设计的系统由深松作业服务平台和农机具终端构成,如图1 所示。农机具终端在深松犁和拖拉机的硬件模块中,由GPS 天线、角度传感器、控制器和显示器构成。通过农机具终端实现位置定位和耕深计算,利用移动网络使数据在服务平台中上传,实现统一管理。另外,在驾驶室中安装显示器,实现耕深的实时显示,指导机手深松作业。
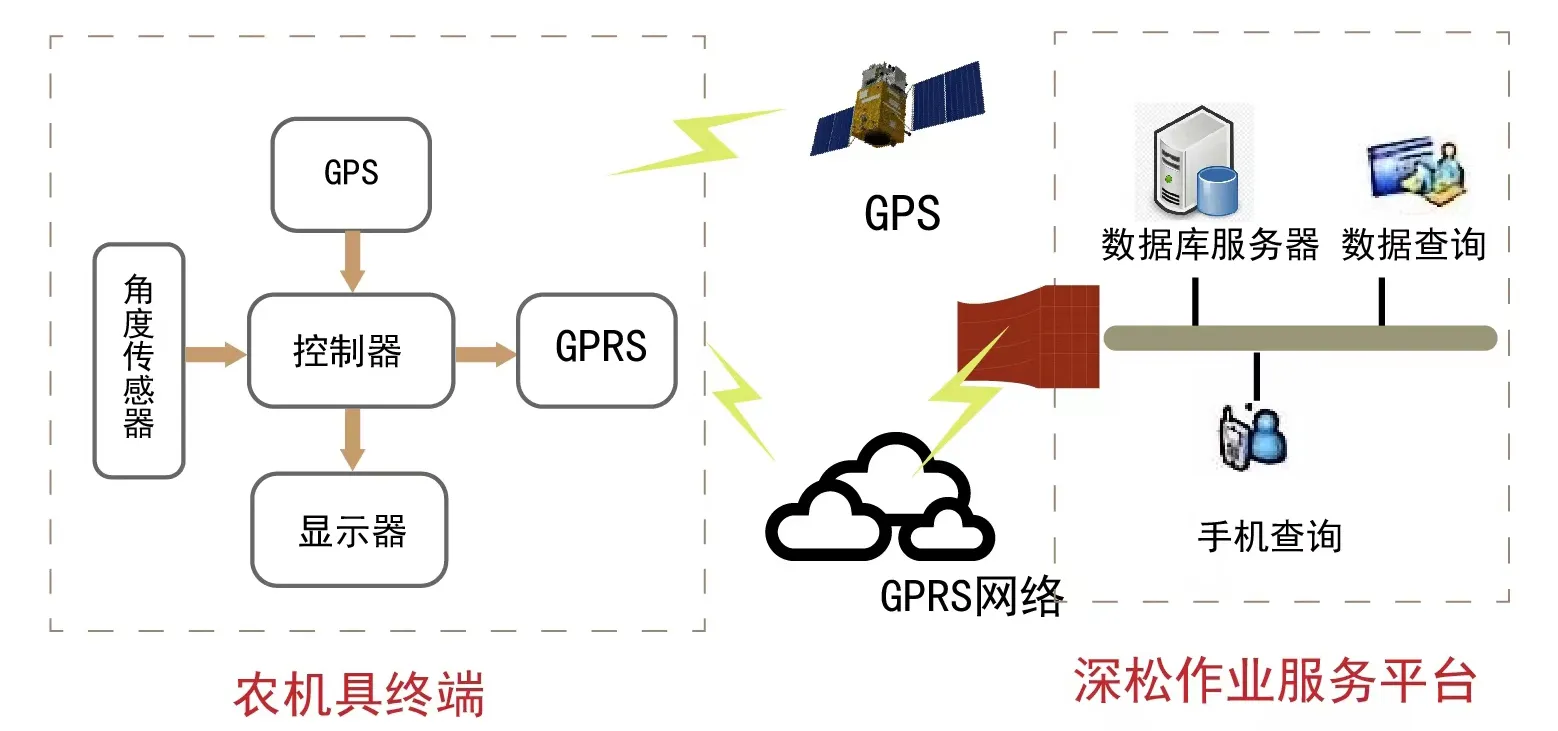
图1 系统的总体架构
使用角度传感器的间接测量方法实现耕深监测,利用防水防尘实现角度传感器模块的封装,在悬挂机构、车身水平和深松机具横梁位置安装[2]。利用角度传感器对车身、深松机具角度变化进行检测,再以几何关系对耕深值进行计算。
2 系统的详细设计
2.1 卡尔曼滤波姿态解散
利用倾角感应器和超声波传感器构成耕深数据收集设备,利用不同的作业参数实现耕深信息的实时更新,从而为耕深信息实时监测提供数据基础。电源模块为供电系统,能够为设备与传感器提供输出装置。在实现传感器测距试验过程中,能够改变地面姿态角和内部敏感元件,此倾角变化所产生的脉冲信号和模拟信号在处理后就会转换为数字信号输出。使用MPU6050 倾斜角感应器模块,测距效果稳定,具有较高的测试精度。在MPU6050倾角传感器模块内部设计稳压电路,能够支持3.3 V/5 V电源模块。此设计能够在大田深松作业中使用,并且此模块能够设置I2C 端口,客户端利用I2C端口实现底层应用的开发。在模块中实现数字滤波电路的设置,使传感器的准确度得到提高,降低噪声对于测量数据的干扰。动态过程中的系统能够通过卡尔曼滤波对系统真实状态进行监测,如果精准度在0.01°以上,安全性就比较高。利用姿态计算对姿态坐标系进行修改,调整姿态角度,通过此角度将飞行器状态数据反映出来[3]。设计地理坐标系n系,x轴为东,y轴为北。MPU6050定义中的b系为载体坐标系,使n系与b系的转动状态作为b系状态,使用3×3的姿态矩阵T表示旋转关系,四元数Q=(q0,q1,q2,q3),表示状态的四要素为归一化,公式为:
结合姿态偏差6 态卡尔曼滤波算法的校正进行计算,结果表明上述算法与传感器能够在深松作业过程中对运动进行测量。
2.2 农机动态设计
将机具传感器与深度传感器安装在模块中,通过无线网络收集农机深松整地作业信息。此模块能够实时监控农机深松作业,从而分析作业过程中的深松情况,解决农机深松作业的问题[4-5]。利用此功能,农机手能够实时分析地理信息,实现地图的放大、缩小与分级显示,以GPS 位置地图定位。此功能模块的位置信息包括用户位置和农机位置,作业位置信息如图2所示。
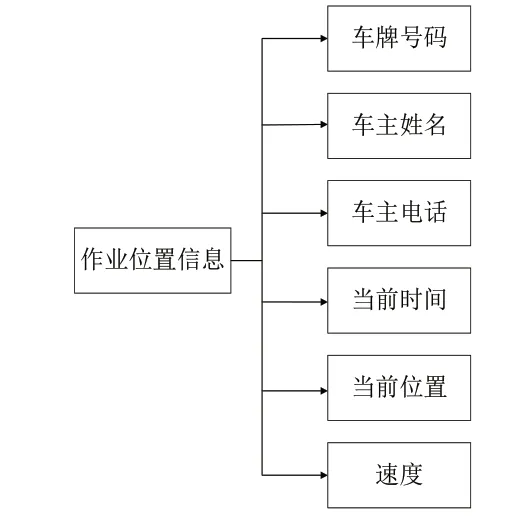
图2 作业位置信息
2.3 轮作查询
通过轮作查询模块能够查询轮作地块数据,手机定位信息和服务器实现交互处理,在作业数据服务器中上传位置信息,实现作业数据的对比。在地图中通过指定位置与当前位置实现专题轮作图的设置,根据机载服务器做轮作图,实现服务功能。
2.4 作业统计
作业统计模块能够实现农机深松作业统计查询,达标面积和作业面积为主要参数,所以此参数要显示在此模块中。系统显示默认当月作业信息,能够切换月份并且查询。在月统计信息栏中,明细页能够显示每天作业面积,报表页能够将农机作业量达标比显示出来,对任何一条记录点击都能够进入到详情页[6]。
2.5 用户中心
用户中心模块能够对个人信息进行查看和管理,主要功能为:1)个人信息。包括电话、姓名、所属省、拖拉机数量、家庭住址等。2)密码更改。农机手手机号为用户默认的登录密码,能够利用此功能对个人登录密码进行修改。3)用户反馈。机械手反馈农机深松整地作业的监管系统意见,反馈实际作业数据和系统作业信息。当其他软件和硬件出现问题的时候,也能够利用此模块反馈信息。4)对系统版本号和版权信息进行记录。
2.6 耕深测量
因为是在大田中开展深松作业,作业环境比较特殊,在日常工作中要对其实用性与便利性进行考虑。分析拖拉机中液压悬吊系统结构机理,寻找拖拉机工作过程中深松机提铲落铲的三点悬挂结构运动规律,根据作业深度构成的数学集合模拟和分析,得出计算方式和共识。深松设备通过拖拽机下拉杆和深松机械悬架装置连接,在作业过程中对拖拽机下拉杆位置进行调整,从而调整土壤深度,保证深松铲的入土倾斜度。分析深松机构造和悬吊系数几何模型,选择土地耕深测量的方法。在深松机大梁中安装超声波设备,将倾角感应器设置在犁架中,利用深松机和上下水平拉杆作业时的运动情况,对耕深情况进行测量[7-8]。
2.7 农机信息服务
此功能接近基层实践,为农机深松作业服务。此功能涉及农机深松信息化监管问题和常见的错误码含义。农机手在空闲的时候能够翻阅电子手册,掌握农机深松基本情况,初步判断农机深松信息化监管设备故障。在后期,农机信息服务模块贴近实际电子手册,使农机手在深松作业前利用电子手册学习简单规范化的作业方法。实现信息反馈页面的设置,机手能够在农机深松作业信息化的过程中,在平台反馈软硬件问题,从而能够更加贴近于实际。
3 田间试验和分析
为了验证系统作业面积和深度的监测精度,对该系统进行测试。在进行测试的过程中,使用1S-230型深松机开展试验,田间试验场景如图3所示。

图3 田间试验场景
3.1 作业深度试验
将终端设置在深松机组中,操作拖拉机悬挂机构,使深松机耕深从浅到深。在整个过程中,每隔一段距离进行测量,操控机组行驶平稳之后,深松机停车不动,准确值为人工拨土的测量耕深,并对比监测系统的结果。如果机组逐渐接近耕深,那么土壤值就是机组作业中的最大深度(即机组和耕深的距离越来越近的话,机组作业最大深度不能够超过土壤值),使耕深能够从深到浅,重复以上监测过程[9-10]。测试数据如图4 所示,通过田间试验可以看出,系统作业的深度测量误差在1.18 cm 以下,均方根误差在0.64 cm以下。
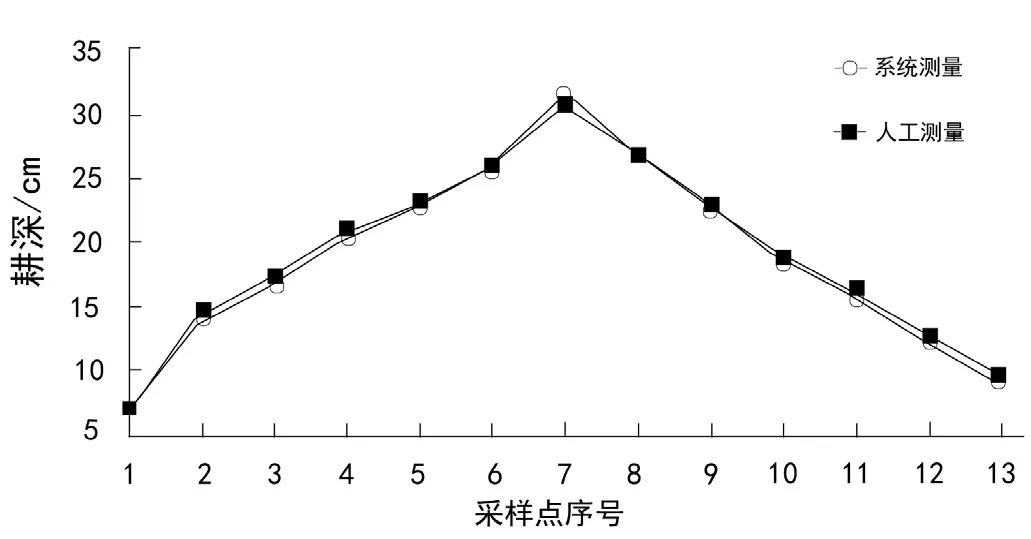
图4 测试数据
3.2 作业面积试验
通过规则矩形试验地,将终端安装在深松机组中,实现往复直线作业。将自动导航系统安装到拖拉机中,能够使作业过程中不重不漏。在开展田间试验的过程中,对系统测量面积进行记录,使用高精度RTK-GNSS 测量试验地块面积,对以上试验过程进行重复测量。表1 为测试数据,田间试验表明,该系统作业面积测量误差和平均误差均不超过0.91%、0.53%。
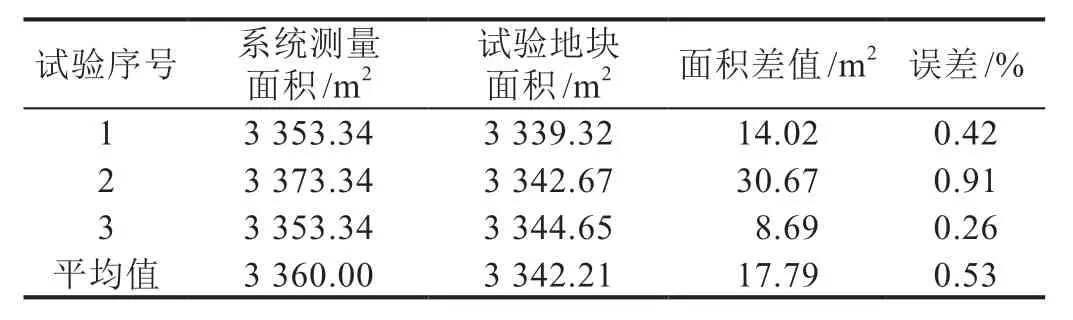
表1 测试数据
4 结语
农机深松作业远程监测系统能够在农机生产作业监测过程中使用现代信息技术,从而精准监测深松机的作业面积和质量,使传统验收过程中工作量大和监测效率比较低的问题得到解决,降低监管压力,提高农机作业管理信息化水平。
猜你喜欢
四川农业与农机(2022年4期)2022-08-31
今日农业(2021年8期)2021-11-28
今日农业(2021年4期)2021-11-27
农业机械学报(2020年9期)2020-10-10
现代农业科技(2020年13期)2020-08-04
价值工程(2019年31期)2019-12-04
中国化肥信息(2019年5期)2019-06-25
农业工程学报(2017年22期)2017-12-15
现代农业(2015年11期)2015-02-28
现代农业(2015年3期)2015-02-28