农业机械自动导航技术研究进展
2023-07-21 10:36冯玉兵
南方农机 2023年15期
冯玉兵
(靖远县农业机械化服务中心,甘肃 白银 730600)
在科技快速发展的过程中,农机领域开始广泛运用自动导航技术,以实现农业机械的自动化与智能化作业,推动农业的现代化发展。实践证明,基于自动导航的农业机械可以降低操作难度,提高农作物生产效率,在未来的农业工作中具有创新潜力。
1 农业机械自动导航技术的研究现状
1.1 农业机械自动导航的典型系统结构
农业机械自动导航技术应用构成了相对应的自动导航系统,该系统最为典型的结构包含了3 个部分,如图1 所示,具体有环境感知单元、控制单元以及执行单元,3 个单元相互协调运转,完成农业机械自动生产作业[1]。
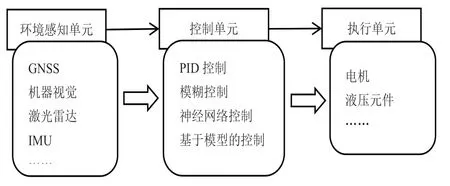
图1 农业机械自动导航的典型系统结构
1.2 环境感知技术研究现状
在农业机械自动导航技术中,环境感知技术是构成环境感知单元的重要技术,主要通过传感器对农业生产作业时环境中各物体信息进行收集,同时也收集农业机械车体的各种状态信息,以下从环境感知的几项关键技术探析其研究现状。
1.2.1 GNSS 技术
GNSS 技术被译为全球导航卫星系统,当前应用在我国农业机械导航系统中最常见且定位达到厘米级精度的技术为RTK-GPS 技术,这种技术最早是被运用在农业拖拉机设备的自动导航功能中,相关导航系统在实现直线跟踪时的误差不超过2.5 cm,从航行方向上来说精度不超过1°。还有研发人员将RTK-GPS 技术融入到残茬测量的农业机器人自动导航系统,实际导航的精度不超过12 cm,有学者基于久保田插秧机农业设备的研究基础,设计开发了利用Trim-ble4700RTK-DGPS 技术的自动导航与控制系统。在其作用下,插秧机行驶速度为0.75 m/s 状态时,直线跟踪的平均误差约为4 cm,最大跟踪误差不超过13 cm,而行驶速度为0.33 m/s 状态时,圆曲线跟踪平均误差也约为4 cm,最大跟踪误差不超过8.7 cm。当前GNSS 技术的研发已经相对成熟,相关定位精度达到厘米级,但实际使用中仍然适合枝叶较稀疏和农田较开阔的场景[2]。
1.2.2 机器视觉技术
近年来,农业机械自动导航领域关于机器视觉技术的研发和应用较多,该项技术的特点是可以获取到更丰富的环境信息。机器视觉导航包括以视觉纹理为基础的跟踪方法,这种方法的原理为提取并跟踪主导的平行纹理方向,同时获取横向偏移量信息,再将特定农作物的细节抽象处理,比如处理株距信息、颜色信息,使农业机械设备可以在白天与晚上顺利沿着导航路径行驶在作物间。国外研究人员还研发出一种多光谱摄像机械视觉导航平台,将该平台运用在果园农作物生产中,获取天空背景和树冠的基本信息,再确定果树行中心的路径,控制平台机器人的行走,实践结果显示,这种导航系统的平均方误差约为2.13 cm,具有较高的准确性[3]。随着机器导航技术的不断发展,研究人员还提出了一种以Census 变换为基础的双目视觉作物行识别导航算法,在该算法作用下可以对作物行中心线进行拟合确认,实际识别的正确率高达92.58%,且角度平均误差不超过1.166°,在图像处理方面也十分快速,平均时间不超过0.3 s。视觉传感器装置本身十分适合获取环境信息,但在针对复杂的农业环境(比如阴影面积较多果园)时,还应优化算法,使其鲁棒性增强[4]。
1.2.3 激光雷达技术
激光雷达主要是通过光反射原理来扫描探测周围环境信息,利用信息来实现自动导航,测距具有精度较高的优点,可以提供更为可靠的物体深度及方位信息。例如,基于激光雷达概率原理可以搭建一种特殊传感器模型,而这种模型能够开发出结合粒子滤波的自动导航算法,应用在农业机械设备中,可保证航向的平均方误差不超过2.4°,横向平均偏差的方误差值约为4 cm。激光雷达技术也可直接用于农作物信息的扫描和获取,比方说果园中可以直接扫描果树树干,提取果树的行直线,通过激光雷达扫描发现,相关农业机械以0.14 m/s 速度行走约40 m 之后,其横向最大偏差值仅为26 cm。可见,在果园作业中该技术的自动导航适应性较佳[5]。
1.2.4 IMU技术
IMU 技术也被称为惯性测量,运用加速度计和陀螺仪来实施加速度和姿态角度的测定,在导航时可以不依赖环境要素。而低成本的IMU 单元通常会随着时间变长累积相关误差,给导航带来不利影响,故而通常不会单独使用该技术,而是与其他类型传感器融合。比如,研发人员将惯性测量和RTK-GPS 技术进行融合,设计出一种能够自动导航行驶作业的履带式农业机械设备,地头转向导航方面则是运用了“钥匙孔”算法,该类机械实践应用结果表明,横向跟踪误差值不会超过5 cm,具有较高的导航精度水平。还有人利用IMU 与RTK-GPS 技术设计了具有自动导航功能的轮式拖拉机,该机械设备导航系统的主要部件如图2 所示,其可以在田间进行耕地作业、除草作业以及喷药作业,都能使导航均方误差值在5 cm 以下,有利于降低劳动力成本并提高生产效率[6]。
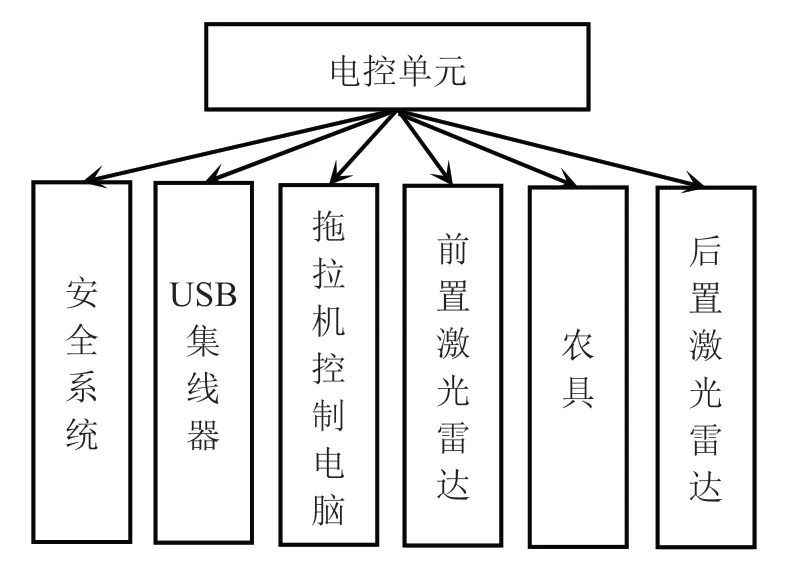
图2 基于IMU与RTK-GPS技术融合的自动导航轮式拖拉机主要部件
1.3 基于导航的控制技术研究现状
1.3.1 PID控制技术
农业机械自动导航的控制技术是匹配环境感知技术运用的重要技术,其中PID 控制技术的应用较常见。这种技术含义指的是比例、积分以及微分等原理下的控制,适合在动态线性的系统中运用,且不会随着时间变化而变化,图3 为PID 控制下的系统结构。在农业机械自动导航领域,部分农业生产的除草机器人中引入PID 控制技术,主要是对机器车轮行驶速度加以调控,在实际速度为0.31 m/s 和0.52 m/s 的情况中,控制跟踪的精度值可达到1.6 cm和2.2 cm。还有研发人员将PID 控制结合RTK-GPS 感知定位技术,使自动导航系统中每个车轮速度的控制更为精准,相关实践表明,若机器行驶速度为0.3 m/s,则其均方误差值约为1.6 cm[7]。PID 控制技术的对应算法最大优点就在于稳态误差偏小,同时并不会依赖于数学模型分析,而决定这种控制精度的要素则包括微分系数、比例系数以及积分系数,对这3 项系数的调整需要基于实际工程经验[8]。
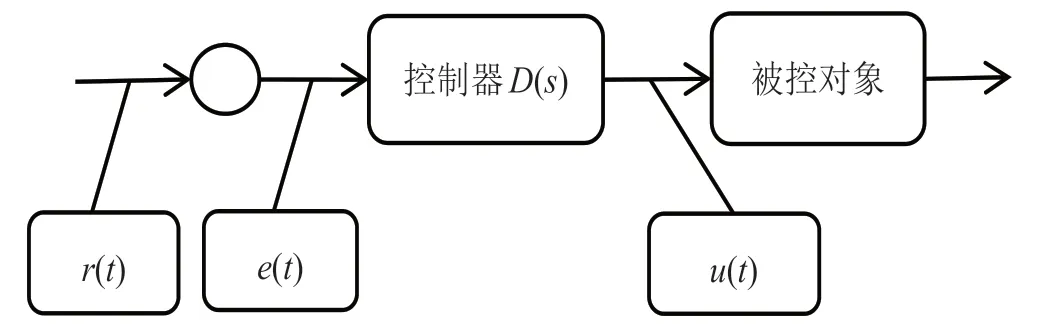
图3 PID 控制技术的原理结构
1.3.2 模糊控制技术
农业机械自动导航系统中的模糊控制技术主要是基于模糊语言变量原理、模糊集合论以及模糊逻辑推理的一种控制手段,在实现控制时无需针对控制的对象搭建数学模型,故而在一些时变、非线性以及对模型完全性要求不高的系统中被广泛运用[9]。模糊控制较典型的原理结构如图4 所示。有学者以遗传算法为基础,研究了一种自适应型模糊控制方式,在遗传算法作用下,模糊控制的输出比例因子与基本规则都能得到优化,在田间开展对应自动导航农机设备的试验运用,发现该控制方式具有超调较小、反应较快的优点,还能将跟踪误差快速消除,确保实际误差不超过10 cm,具体控制是农机模糊控制器中输入横向与航向的偏差数据,随后输出前轮的转向角参数,再进一步调整农机导航数据。试验控制显示,在农机行驶速度为0.8 m/s 时,导航平均误差值约为2.87 cm,行驶速度为1.0 m/s 时,导航平均误差值约为3.34 cm,行驶速度为1.2 m/s 时,导航平均误差值约为4.16 cm,符合生产作业的精度要求。
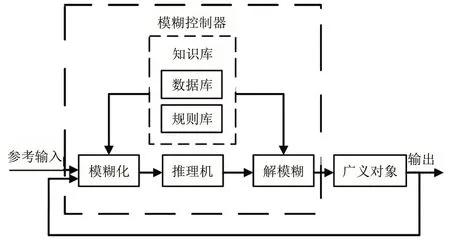
图4 模糊控制技术的原理结构
2 农业机械自动导航技术的研究展望
自动导航技术研发将持续推进,该类技术在农业机械领域的应用也会越来越广泛,笔者希望未来的研究更多围绕着智能化避障,确保农机使用时的行驶规范性更强,比如可以深度学习为基础开发更精确的障碍物感知检测技术,推动农业机械自动化和智能化水平的提高。还需注意各类传感器装置优缺点并不一致,农业环境本身也具有复杂性、时变性,故而未来也需融合多种传感器的环境感知系统,使系统的运行更为稳定。比如说郁闭果园环境中卫星信号的传送很容易被干扰,那么就可以将激光雷达传感器和机器视觉传感器融入,保证自动导航更加可靠与精确,还可借助物联网技术来搭建农机自动导航作业的远程监控平台,实现远程任务调度及可视化管理[10]。
3 结论
综上所述,农业机械中的自动导航技术,可以保证机械按照特定路径规范行驶,确保其运行的稳定性和可靠性[11-13]。由笔者分析可知,当前农业机械自动导航环境感知技术的研究主要围绕着GNSS 技术、机器视觉技术、激光雷达技术等几项技术,基于导航的控制技术则包括PID 控制技术、模糊控制技术等[14-15]。未来农业机械自动导航环境感知技术需融合多种传感器的环境感知系统,实现农业机械的自动化与智能化作业,推动农业现代化发展。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
建材发展导向(2019年13期)2019-08-24
电子制作(2019年7期)2019-04-25
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
西南交通大学学报(2016年3期)2016-06-15
照明工程学报(2016年3期)2016-06-01
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22