基于绳驱动的多段柔性连续体机械臂的运动学与实验研究
2023-07-26 12:43王爽任晗李桢郭超李单青张向慧
科学技术与工程 2023年19期
王爽, 任晗, 李桢, 郭超, 李单青, 张向慧
(1.北方工业大学机械与材料工程学院, 北京 100114; 2.中国科学院自动化研究所多模态人工智能全国重点实验室,北京 100090;3.北京协和医学院北京协和医院, 北京 100730)
与传统的刚性机器人相比,柔性连续体机器人具有良好的灵巧性和柔顺性,更适用于空间狭小、路径复杂的场景,如应用于航空、医疗等领域。在医疗手术机器人领域,目前绳驱动连续体机器人主要有离散关节串联构型和柔性骨架的连续体构型这两种构型。离散关节串联的连续体机器人,该结构变形程度由每个关节可变形的角度决定,但是存在关节间的约束难以建立精确模型的问题。Hong等[1]提出了一种应用于上颌窦手术的球型关节铰接构型的连续体机器人。Ji等[2]提出了一种具有球型关节和弹簧构成的微创手术机器人。另一种是柔性骨架构成的连续体机器人,该结构主要由弹性中心骨架和节盘构成,利用骨架自身的形变来完成弯曲和旋转等运动,并采用多根驱动丝来进行控制,该结构具有良好的柔顺性且适用于负载能力需求不高的场景,如医疗领域。Wilkening等[3]提出了一种应用于骨科的由两侧交替切口镍钛骨架构成的连续体机器人。Kato等[4]提出了一种应用于神经外科的导丝盘和柔性骨架构型的连续体机器人。Li等[5]研发了单孔手术机器人,该柔性体段由多个关节铰接和柔性骨架构成,具有比传统的绳驱动蛇形机械臂具有更大的空间。
运动学模型的精准度将影响机器人的整体控制效果,针对多段连续体机械臂的运动学建模,多位学者开展了研究工作。连续体机器人的运动学通常采用基于模型的方法或无模型的方法[6]。Hwang等[7]对具有切口式绳驱动的连续体机器人通过D-H(Diffie-Hellman)参数法建立了运动学模型。王腾等[8]利用增广雅克比矩阵求解冗余机械臂的运动学模型。常曲率运动学模型具有计算速度快的特点。周圆圆等[9]提出了一种可运动解耦的连续体机器人,提出了远端与近端的连续体机器人的解耦方法。陈元科等[10]提出了分段常曲率与粒子群算法结合的运动学模型,用于丝驱动的连续体机器人。Chen等[11]针对微创手术提出了一种基于Cosserat杆理论的多段连续体机器人的运动学模型。Chen等[12]提出了考虑环境影响的分段常曲率方法,应用于软机械臂。卢佳佳等[13]提出了基于分段常曲率结合D-H参数法建立了连续体机械臂的正逆运动学模型。Wu等[14]采用了多段解耦的方法对腹腔镜机器人进行运动学建模。
然而,柔性连续体机器人的末端位置误差大多数是由非线性因素引起的,非线性建模复杂,且模型精度有限。因此,一些学者已经开始采用无模型的方法。Tan等[15]学者提出了一种基于归零神经动力学方法的连续体机器人的无模型控制方法。Wang等[16]提出了一种混合运动学模型,利用混合自适应框架来为机器人提供额外的驱动量。张震等[17]采用粒子群优化的径向基函数神经网络来求解机械臂的运动学模型。
综上所述,针对经自然腔道手术的操作需求以及灵巧性的要求,设计一种基于绳驱动的多段柔性连续骨架构型的连续体机械臂,具有全维度大角度弯曲能力。并且基于分段常曲率方法建立了连续体机械臂的正运动学映射;以连续体机械臂任务空间的末端位置为输入,驱动空间的驱动绳拉伸量为输出构建神经网络,拟合连续体机械臂的逆运动学映射,解决逆运动学求解困难且非线性误差难以补偿的问题。通过弯曲运动实验和轨迹跟踪实验验证连续体机械臂的运动性能以及运动学模型的有效性。
1 连续体机械臂结构设计
绳驱动连续体机械臂结构如图1所示,所设计的连续体机械臂由双段柔性连续体、三个导绳盘以及若干间隔盘串联构成。近端柔性连续体L1由三根近端驱动绳控制,三根驱动绳在圆周上间隔120°均匀分布,同样地,远端柔性连续体L2由三根远端驱动绳控制。驱动绳采用直径为d1规格的镍钛绳。远端柔性连续体的三根驱动绳需要穿过近端柔性连续体。
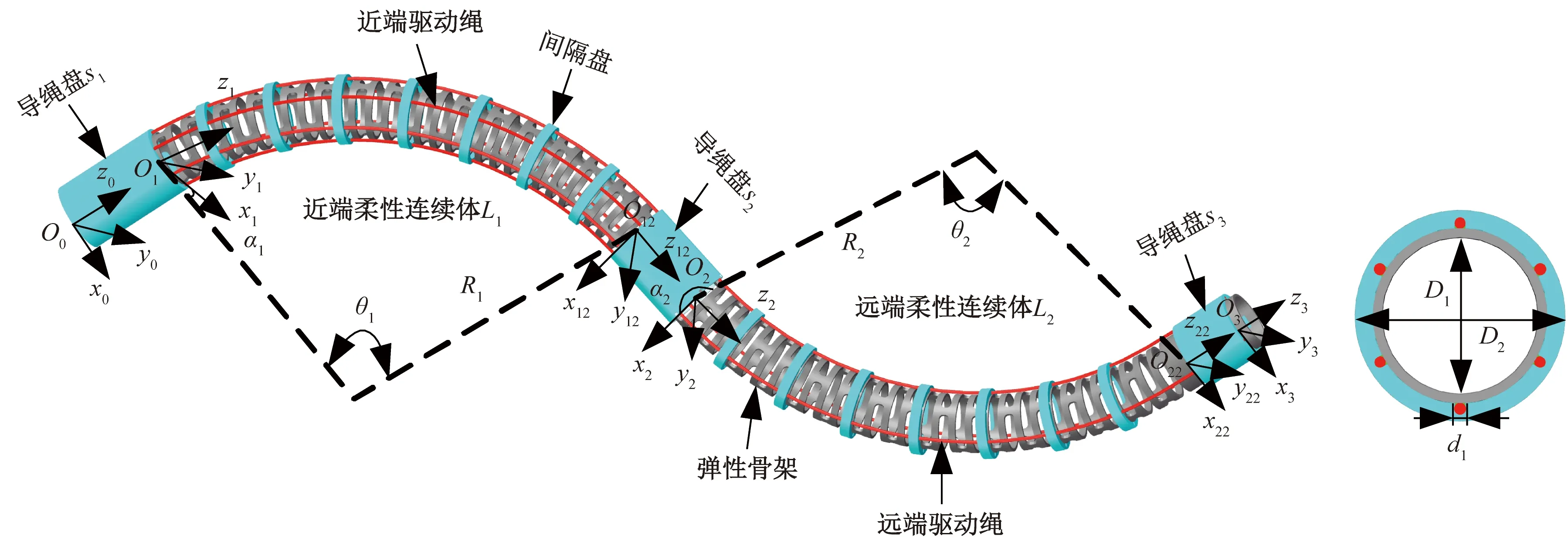
图1 绳驱动连续体机械臂结构Fig.1 The structure of the rope-driven continuum manipulator
其中,柔性连续体中的弹性骨架为镍钛合金骨架经过激光切割加工一体化成型,设计了具有切口梁式的中心弹性骨架结构,具有直径为D1的内部工作通道,利用镍钛合金的超弹性来实现连续体机械臂的弯曲运动。导绳盘的内侧具有驱动绳的通道,从近端到远端的导绳盘分别为s1、s2、s3,导绳盘的外径为D2。
2 连续体机械臂运动学模型
采用分段常曲率方法,求解正运动学映射;基于神经网络模型,求解逆运动学映射。构建连续体机械臂末端位置与驱动绳拉伸量的运动学模型。任务空间、配置空间和驱动空间三个空间之间的运动映射关系如图2所示。任务空间变量为(x,y,z),其中,x,y,z为笛卡尔坐标系下末端连续体机械臂的坐标;配置空间变量为(α1,θ1,α2,θ2),其中,α为连续体机械臂的旋转角,θ为弯曲角;驱动空间变量为(Δl1,Δl2,Δl3,Δl4,Δl5,Δl6),其中,Δl为六根驱动绳的拉伸量。

图2 运动学映射关系图Fig.2 Kinematic mapping diagram
2.1 连续体机械臂正运动学映射
单段连续体机械臂具有3个驱动自由度,长度为Li。其几何理论模型如图3所示,在连续体机械臂的底部中心建立坐标系{Oi},顶部中心建立坐标系{Oi2},坐标系的x轴方向为指向三根驱动绳中的一根,z轴方向为沿着轴线方向,y轴由右手定则决定。坐标系{Oi}经过多次的旋转与平移变换后得到坐标系{Oi2}。因此,可得出坐标系{Oi}到{Oi2}的齐次变换矩阵,即
trans[Ri(1-cosθi),0,0]rot(y,θi)rot(z,αi)
(1)
式(1)中:i表示连续体机械臂段数;Ri为该段连续体机械臂的弯曲半径。
两段柔性连续体机械臂由两个单段柔性连续体及三个导绳盘平移段串联而成。本文中采用分段常曲率方法建立运动学模型,其几何模型如图1所示,各坐标系的设置如下:在第一个平移段的底部中心建立基坐标系{O0},近端柔性连续体底部中心建立坐标系{O1},第二个平移段的底部中心建立坐标系{O12},远端柔性连续体底部中心建立坐标系{O2},第三个平移段的底部中心建立坐标系{O22},柔性连续体机械臂的末端中心建立坐标系{O3}。其中,坐标系的方向设定法则与单段连续体机械臂设置一致。基于单段的运动学模型,采用分段常曲率方法进行双段连续体机械臂建模。柔性连续体机械臂的末端位置可由配置空间通过全局坐标系和局部坐标系的齐次变换矩阵转换得出。
沿着第一个平移段的z轴方向平移其轴线长度s1,得到基坐标系{O0}到坐标系{O1}的齐次变换矩阵,即
(2)
沿着第二平移段的z轴方向平移其轴线长度s2,得到基坐标系{O12}到坐标系{O2}的齐次变换矩阵,即
(3)
近端柔性连续体的齐次变换矩阵由三部分的齐次变换矩阵连乘得出,即
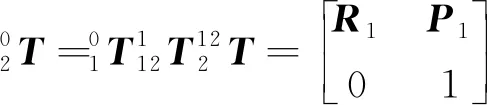
(4)
式(4)中:R1为3×3的旋转矩阵;P1为近端柔性连续体机械臂的末端位置向量,其表达式为

(5)
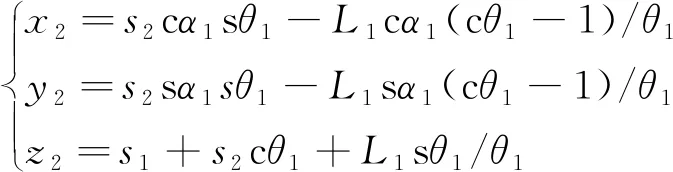
(6)
式(6)中:s表示正弦函数sin;c表示余弦函数cos。
沿着第三平移段的z轴方向平移其轴线长度s3,得到基坐标系{O22}到坐标系{O3}的齐次变换矩阵,即
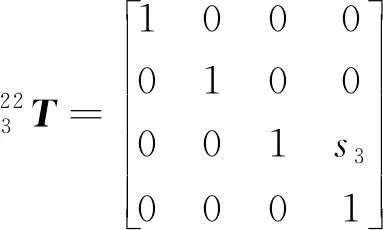
(7)
远端柔性连续体机械臂的齐次变换矩阵由五部分的齐次变换矩阵连乘得出,即

(8)
式(8)中:R2为3×3的旋转矩阵;P2为远端柔性连续体机械臂的末端位置向量,其表达式为
P2=[x3y3z3]T
(9)
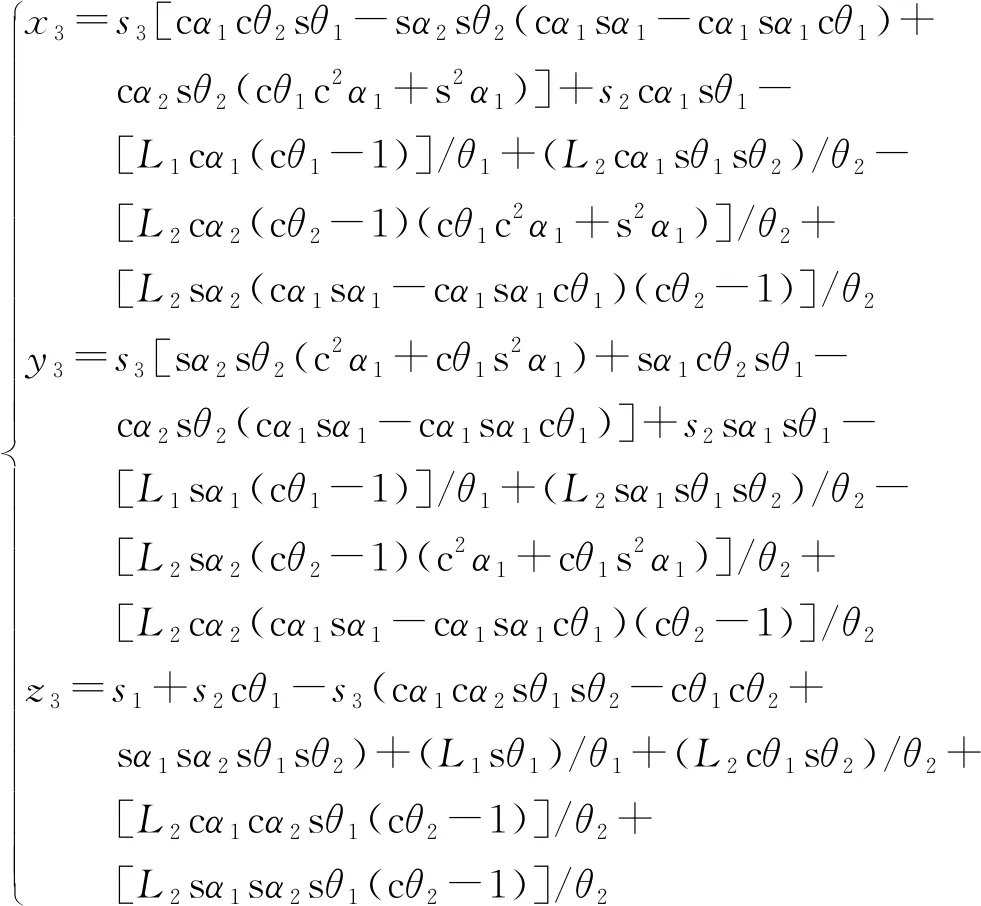
(10)
两段连续体机械臂的末端需要实现全维度的导向功能,其运动涉及解耦分析。当近端连续体机械臂进行弯曲和旋转运动时,远端连续体机械臂为了保持相对于近端的静止状态,需要考虑近端的耦合影响,驱动空间的变量(Δl1,Δl2,Δl3,Δl4,Δl5,Δl6)随之发生改变。其中,(Δl1,Δl3,Δl5)为近端连续体机械臂的驱动量,(Δl2,Δl4,Δl6)为远端连续体机械臂的驱动量,(Δl12,Δl14,Δl16)为远端驱动绳受近端连续体机械臂弯曲耦合影响的各驱动绳拉伸量。因此,配置空间中旋转角、弯曲角与驱动空间中驱动绳的变化量关系为
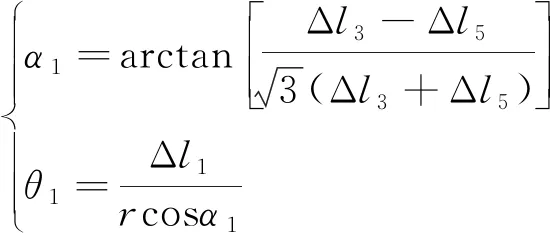
(11)
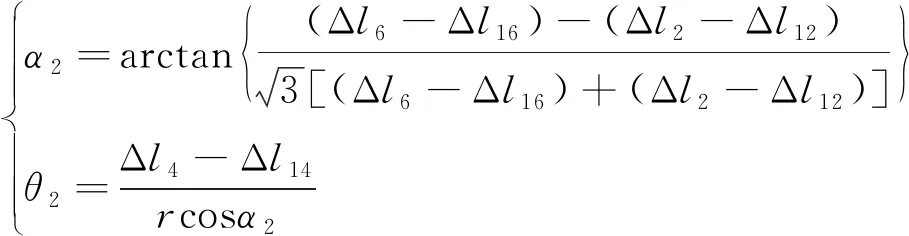
(12)
式中:r为驱动绳通道圆心距连续体机械臂的轴心距离。
2.2 连续体机械臂逆运动学映射
连续体机械臂由于机械装配、摩擦等非线性误差,导致难以建立准确的运动学模型。前馈神经网络具有良好的自适应能力,通过对样本的学习训练后能拟合非线性的输入输出关系,且结构简单,可操作性强。因此,本文中采用前馈神经网络进行连续体机械臂的逆运动学求解。
神经网络结构如图4所示,建立了3输入6输出的双层神经网络结构,任务空间中机械臂的末端位置(x,y,z)为神网络的输入,驱动空间中各驱动绳拉伸量(Δl1,Δl2,Δl3,Δl4,Δl5,Δl6)为输出。
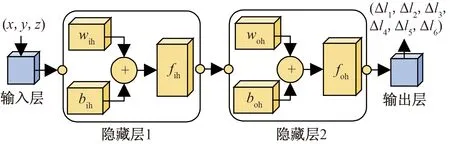
w、b、f分别为权值、阈值和传递函数图4 神经网络结构Fig.4 Neural network structure
通过实验采集的连续体机械臂末端位置和驱动绳拉伸量建立样本数据集,在工作空间中共采集了1 400组样本数据,其中,70%的数据作为训练集,30%的数据作为测试集。学习率设置为0.3,前馈神经网络的流程图如图5所示,首先,生成训练集测试集,构建神经网络,进行权值和阈值初始化,接下来,训练神经网络,更新迭代权值和阈值,当训练的输出误差达到训练精度要求时,将停止训练;未满足结束条件,将继续更新权值和阈值,最后,利用测试数据集进行预测,测试神经网络训练效果并计算训练及测试误差大小。
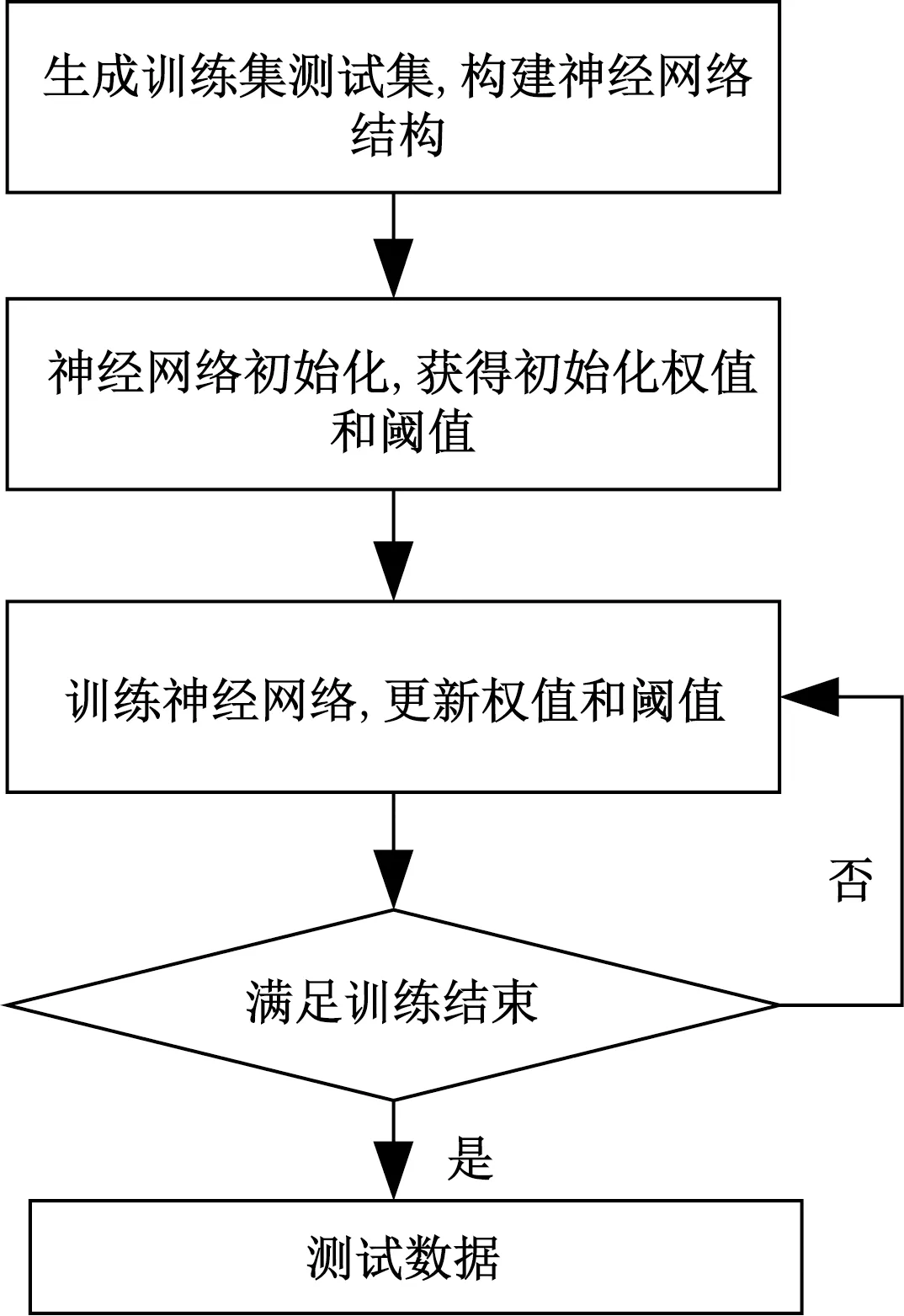
图5 前馈神经网络流程图Fig.5 Feedforward neural network flow chart
仿真结果如下:神经网络训练平均绝对误差为0.215 mm,测试平均绝对误差为0.192 mm。该神经网络的误差量约为连续体机械臂长度的1%以下,该误差量对连续体机械臂的运动控制影响较小,因此,可采用神经网络对连续体机械臂进行逆运动学模型映射。
3 实验及结果分析
本文中对连续体机械臂的弯曲能力和所提出的运动学模型的控制效果开展验证实验。连续体机械臂的实验系统如图6所示,该系统由操控模块、上位机、驱动模块、连续体机械臂、光学追踪平台(NDI Polaris Vega)组成。其中,上位机发送运动指令给驱动模块,也可以采用经操控模块和上位机发送运动指令给驱动模块,驱动模块驱动连续体机械臂进行运动,光学追踪平台用于采集连续体机械臂的末端坐标信息。连续体机械臂的设计参数如表1所示。
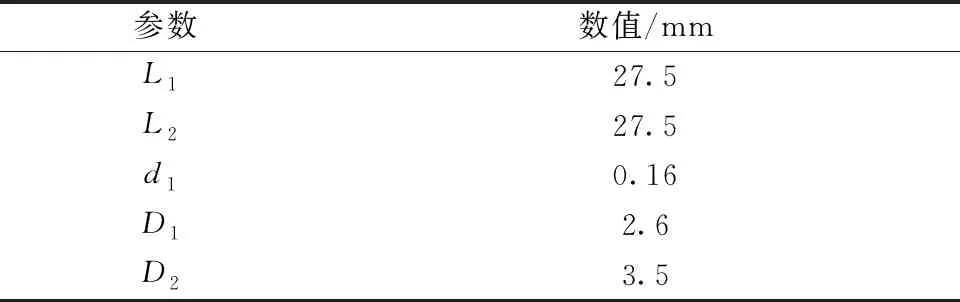
表1 连续体机械臂的设计参数
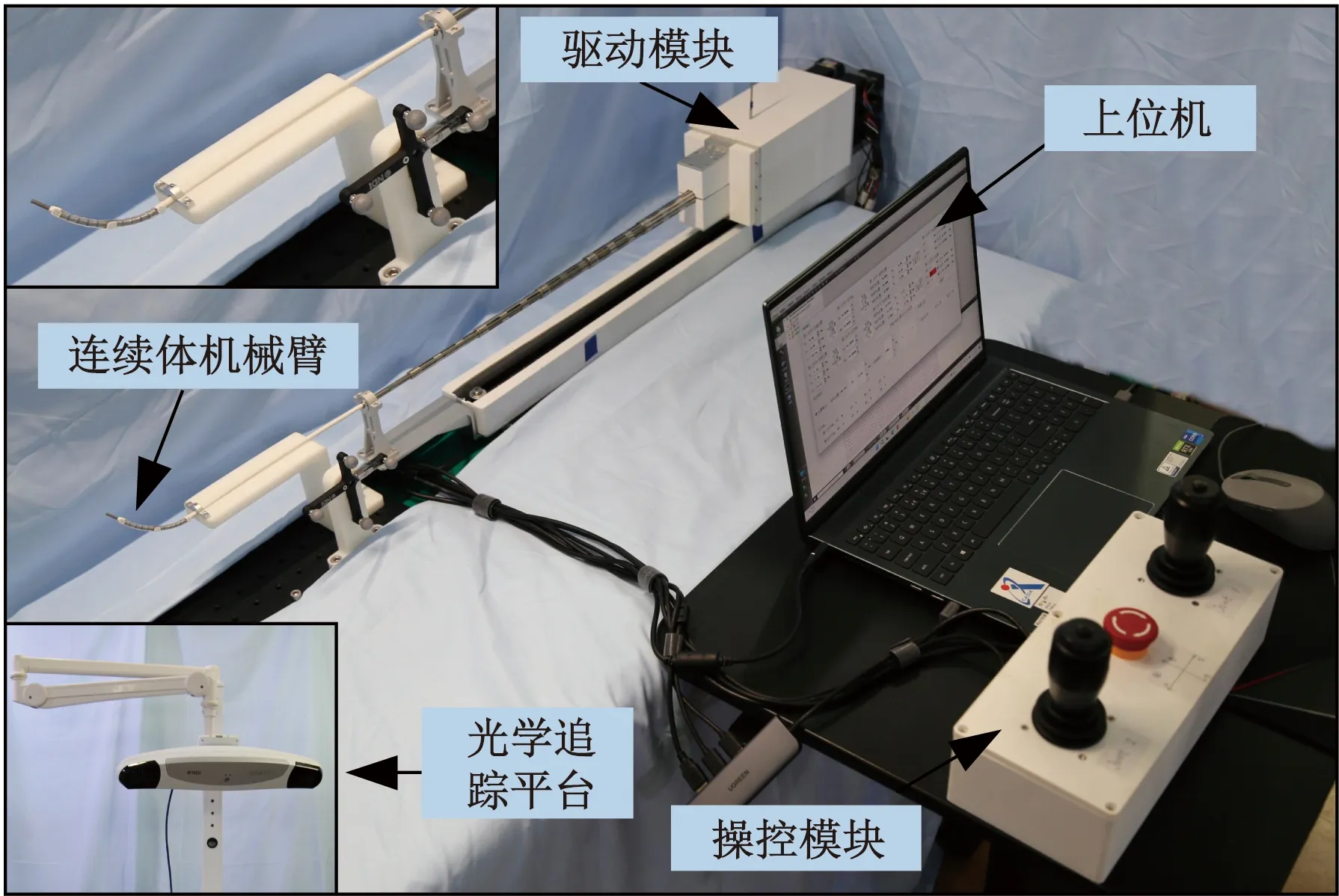
图6 连续体机械臂实验系统组成Fig.6 Continuum manipulator experiment system composition
3.1 弯曲性能验证实验
连续体机械臂的弯曲性能验证实验设置为机械臂分别进行向上、向下、向左、向右四个方向的弯曲运动。图7为四个方向的弯曲运动效果图,显示双段连续体机械臂可完成弯曲角度约为180°的大角度弯曲运动。弯曲性能实验验证了所设计的连续体机械臂具有大角度弯曲运动的能力,具有在狭窄、复杂的腔道内弯曲的潜力。
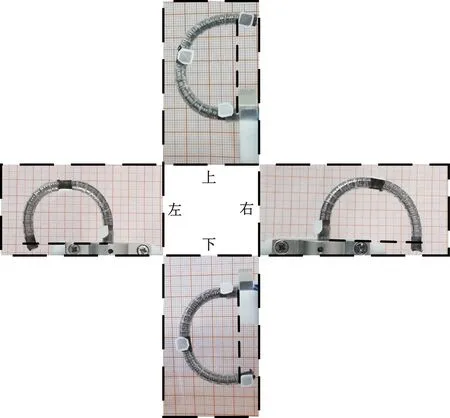
图7 连续体机械臂弯曲性能验证实验图Fig.7 Verification experiment of bending performance of continuum manipulator
3.2 轨迹跟踪实验
轨迹跟踪实验的目的是为了验证连续体机械臂运动学模型的效果。在双段连续体机械臂末端以及连续体机械臂的底部粘贴光学标记纸,利用光学追踪平台识别标记纸的位置信息,采集经神经网络拟合的运动学模型驱动后连续体机械臂的末端位置坐标。
在连续体机械臂的工作空间中,进行半径为25 mm的圆形轨迹跟踪,连续体机械臂的运动轨迹如图8所示,红色为预期轨迹,蓝色为实际轨迹,实际轨迹与预期轨迹存在一定的误差。在各坐标轴方向上的轨迹跟踪误差如图9所示,重复进行5次圆轨迹跟踪实验,得到连续体机械臂末端在x轴、y轴、z轴方向的平均绝对位置误差为1.743、1.334 mm和1.172 mm。实验结果表明所提出的运动学模型有效的补偿了由于摩擦、装配等产生的非线性误差。但经过分析,神经网络虽然补偿了一些位置误差,但是仍有一些误差的引入,如光学标记贴纸位置的偏差。
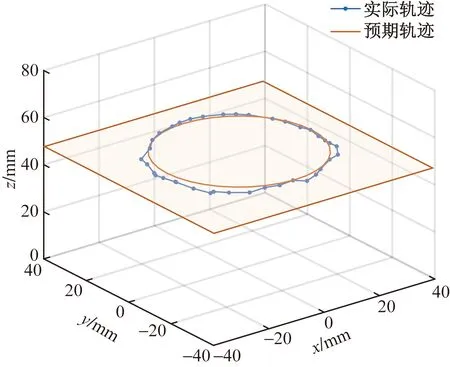
图8 连续体机械臂运动轨迹图Fig.8 Motion trajectory diagram of continuum manipulator
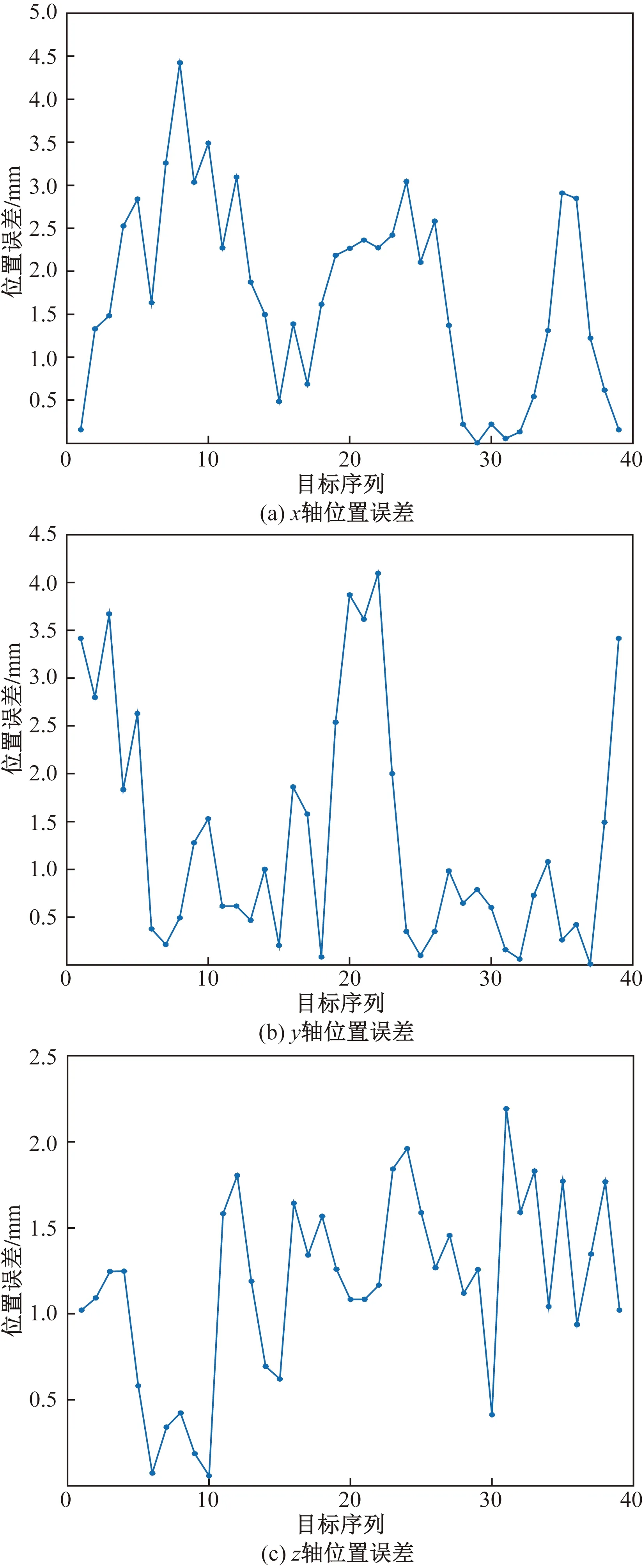
图9 连续体机械臂轨迹跟踪误差图Fig.9 The continuum manipulator trajectory tracking error
4 结论
本文设计了一种应用于经自然腔道手术的绳驱动的多段连续体机械臂,并基于分段常曲率和神经网络的方法,构建了任务空间和驱动空间的正逆运动学映射,拟合出了连续体机械臂末端位置和驱动绳拉伸量的映射关系,仿真测试误差约为连续体机械臂长度的1%以下,表明所提出的方法可用于连续体机械臂的运动学模型。最后,对连续体机械臂的弯曲能力和运动学模型效果进行了验证实验,连续体机械臂的弯曲性能实验表明该机械臂具有良好的弯曲能力,可以实现大角度弯曲变形;轨迹跟踪实验结果显示,基于运动学模型的驱动,在半径为25 mm的圆轨迹上,连续体机械臂末端在x轴、y轴、z轴方向的平均绝对位置误差为1.743 、1.334和1.172 mm,表明所提出的双段连续体机械臂的运动学模型的有效性,可用于连续体机械臂的运动控制。接下来,我们将在采集连续体机械臂更全面的位置信息和实时闭环位置控制上展开研究工作。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2018年11期)2018-11-23
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
海军航空大学学报(2015年1期)2015-11-11
机械制造与自动化(2014年1期)2014-03-01