
一种阻隔板结合烘干功能的多功能扫地机器人
2023-08-01 03:28王云通桑俊垚薛凯峰顾宗磊
现代信息科技 2023年11期
王云通 桑俊垚 薛凯峰 顾宗磊

摘 要:针对目前扫地机器人普遍存在价格高、功耗大、无法合理解决地面水渍等问题,提出一种阻隔板结合烘干功能的多功能扫地机器人设计,对相关扫地机器人进行了改良。综合效率、功率等因素,选用2HB064M混合式驱动器和86BYG2503的步进电机;对出水装置进行了改良,采用阻隔板控制并用卡扣固定;采用小功率烘干装置来清除地面水渍,该设计主要解决的是地面水渍问题。并对样机试验的结果分析,校核了部件参数,让整机的结构更符合真实环境使用。
关键词:扫地机器人;调节出水量;小功率;烘干
中图分类号:TP242;TH122 文献标识码:A 文章编号:2096-4706(2023)11-0179-04
A Multifunctional Sweeping Robot with Barrier Plate and Drying Function
WANG Yuntong, SANG Junyao, XUE Kaifeng, GU Zonglei
(School of Mechanical and Vehicle Engineering, Linyi University, Linyi 276000, China)
Abstract: Aiming at the general problems of high price, high power consumption, and inability to solve the problem of water stains on the ground, a multifunctional sweeping robot design with barrier plate and drying function is proposed, and the relevant sweeping robots are improved. Considering efficiency, power and other factors, 2HB064M hybrid driver and 86BYG2503 stepping motor are selected. The water outlet device has been improved, which is controlled by a barrier plate and fixed by a clip. The design uses a small power drying device to remove water stains on the ground and the design mainly solves the problem of water stains on the ground. The results of the prototype test are analyzed, and the parameters of the components are checked to make the structure of the whole machine more suitable for the real environment.
Keywords: sweeping robot; regulation of water output; miniwatt; drying
0 引 言
随着社会的发展,人们生活节奏逐渐变快,工作压力持续增大,從繁重的家务劳动中解脱出来成为多数人的迫切需要,而传统方式上聘请家政人员不仅价格昂贵,而且效率低下。这都为人工智能领域提供发展契机,尤其在家居方面的清洁一体化设备如雨后春笋般出现。
早在20世纪90年代,瑞典率先提出了一种清洁机器人并小规模量产,随后美国、英国等发达国家也进军该领域,扫拖一体机器人也正朝着精巧化、智能化方向发展。国内扫地机器人技术研究起步较晚,存在许多问题,比如功耗较大、无法合理解决湿地面清扫问题而带来二次污染、现有技术中的扫地机器人采用固定抹布的方式工作居多、以及在拖地时抹布很容易出现变干或水分过多等问题。
为了满足清洁机器人市场的需求,有效清洁。本文综合国内外清洁机器人的优劣,针对扫拖一体机机器人作出改进并给出具体方案,提出一种阻隔板结合烘干功能的多功能扫地机器人设计,并通过样机测试实验校核,确保符合设计要求。
1 总体方案设计
1.1 整体组成
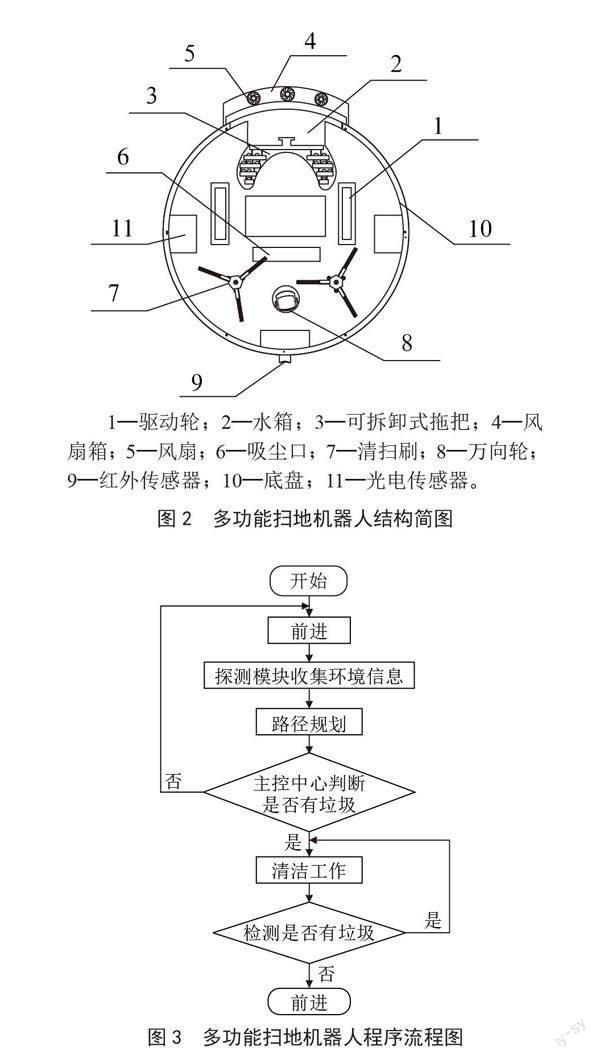
本设计的目的是设计一种可靠、清洁效率高、具备烘干等多功能扫地机器人,具体组成是由探测模块、清扫模块、拖地模块、行走模块、风干模块、主控模块组成,主要部件包括:驱动轮、光电编码盘、水箱、可拆卸式拖把、风扇箱、风扇、清扫刷、万向轮、红外传感器、光电传感器、阻隔板、电热丝等装置,其三维模型如图1所示,其结构简图如图2所示。
1.2 工作原理
本文设计的多功能扫地机器人程序流程图,如图3所示。基本工作原理如下:打开电源后,扫地机器人在行驶过程中由探测模块收集周围环境信息,传输给STM32F103zet6单片机进行清扫判定,随后清扫模块、拖地模块对清洁区域内的垃圾清除并完成拖洗,风干模块开始工作,通过风干模块对清扫区域进行烘干,最后由主控中心判断已清扫区域是否仍有垃圾,如有则继续清扫工作,无则完成整个工作程序。
2 关键部件结构设计
2.1 探测模块
探测模块直接与主控中心相连,将收集的环境信息转换成电信号传输给主控模块,实现信息传递。
探测模块包括三个光电传感器和一个红外线传感器,光电传感器分布在底盘的前部左部和右部,作为台阶检测传感器,防止跌落;红外线传感器安装在前端,作为碰撞检测传感器,防止碰撞、实现精确定位和路径规划。
型号方面,光电传感器选择角度位移传感器,其原理简单,设计简便,如果马达角度传感器构造运转,而齿轮不转证明遇到障碍物;红外线传感器方面,选用主动式红外传感器[1],当红外线的发射和接受系统之间的不可见的光路被阻挡时,接收装置迅速反应,发出电信号提示光路被阻碍,从而实现碰撞检测作用。
2.2 行走模块
扫地机器人的正确行驶是一待解决的问题。为实现这一目的,本文设计采用驱动轮差速运动控制,在行走模块上采用在驱动轮上安装光电编码盘[2],实现对轮速的控制、调节;驱动轮差速运动配合万向轮实现任意方向转向,确保在小距离内进行转向,使扫地机器人更加灵活,能够适应多样环境。
由于扫地机器人整机安装在底盘上面,所以底盘上的行走模块应具有足够的承载能力并能提供足够动力。故本文设计的多功能扫地机器人采用选用型号为2HB064M两相细分混合式步进电机驱动器[3],驱动电机选用的型号为86BYG2503的步进电机,与所用驱动器相适应匹配,能为扫地机器人提供更大扭矩,以此输出更大动力。除此之外,在驱动轮最外圈设有橡胶花纹,以增强驱动轮抓地力,防止出现打滑失效现象,保证机器正常运转。
2.3 清扫模块
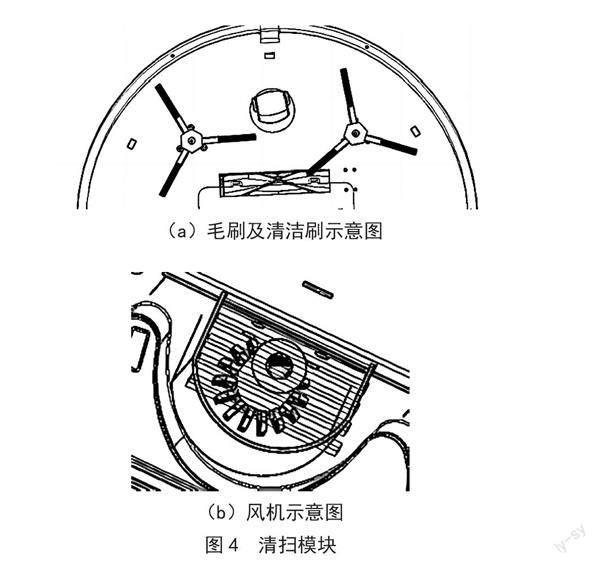
清扫模块主要是完成清扫,为拖地前做预处理工作。清扫模块由毛刷、清洁刷、电机、风机和灰尘盒组成,如图4所示。在接到主控中心清扫判定之后,清扫模块配合多个传感器开始工作,两个清扫刷电机采用150 r/min的9 V普通直流微型电机驱动,使左面清扫刷顺时针转动,右面清扫刷逆时针转动,从而将灰尘集中于吸尘口处,再由毛刷和风机将垃圾吸入灰尘盒内,实现地面的预清理。
2.4 拖地模块
拖地模块包括可拆卸式拖把和水箱,如图5(a)所示。拖把连接水箱,在拖把上平面设有磁铁,拖把下平面设有出水孔,阻隔板与出水孔配合,利用阻隔板挡住出水孔的大小,以达到控制出水量目的;为提高密封性、防止渗水,在拖把上固定有卡扣,卡扣与拖把连接处设有密封圈。阻隔板上设有海绵通过魔术贴连接,以方便拖地海绵拆卸清洗。
如图5(b)和图6所示,阻隔板上的连接柱与卡扣滑动连接,另设有调节推扭,调节推扭可以方便人员对阻隔板的上下移动,从而控制出水孔大小以实现出水量调节;在调节推扭上设有防滑条纹,增大摩擦力,方便控制。
外壳内部固定有一块铁板,利用拖把上平面固定的磁铁,与外壳内部的铁板配合,固定拖把和水箱。
2.5 风干模块
为了合理解决湿地面清扫问题带来二次污染,以及湿地面带来的诸多问题,本文设计了风干模块[4],实现对清洁区域的烘干。风干模块固定在外壳上,主要是风扇箱。风扇箱内设有三个风扇,均匀分布在风扇箱上。风干模块的主要作用是烘干地面,合理解决湿地面带来的问题,为了更好实现这一目的,在风扇箱内还设有电热丝,电热丝用来加热空气,风扇将加热的空气持续吹出,达到烘干地面的效果。
工作中可能会有温度过高造成机器损坏,烘干工作效率下降,为了避免这种情况,采用型号为DS18B20的温度传感器,设定温度阈值对工作温度进行有效监测。温度超过设定阈值则会发出提醒,主控中心判定暂停工作。
2.6 控制系统
本文设计的阻隔板结合烘干功能的多功能扫地机器人的主控模块,采用 STM32F103zet6单片机[5],其作用主要是对探测模块所收集的环境信息进行运算、判断,完成对机器人控制。
为了更好控制轮速、自动调整行走轨迹,行走模块中采用86BYG2503的步進电机和2HB064M两相细分混合式步进电机驱动器;控制系统选用PID算法,其算法的控制参数相互独立,参数的选定简单,结构简单、稳定性好、工作可靠、调整方便能够完成连续状态进程校正,根据对收集的信息与预先给定的数值之间的误差比例,进行运算、微分、积分,得出结果,通过结果分析,从而达到调整姿态的目的[6]。
2.7 本章小结
本章节通过对扫地机器人的设计要求分析,最终确定设计方案。考虑到拖地时出水量问题,采用阻隔板对出水量进行控,并由卡扣进行固定;设计中为了满足小距离内灵活转向,行动部分采用差速装置;为确保正确行进,采用PID算法分析运算,实现行进姿态调整;针对地面水渍问题,采用风干模块来清除地面水渍。
3 样机及调试
本文设计的具有可拆卸拖把的多功能扫地机器人主要参数如表1所示。
对本文设计的具有可拆卸拖把多功能扫地机器人对调试,主要针对是否按照规定路线、清洁后地面有无水渍、各模块正确工作、主控正确判断四个方面各进行了30次试验,试验结果如表2所示。
其中是否按照规定路线受到多方面影响,比如探测模块传感器收集的信息是否全面、光电编码盘检测轮速是否正确、PID算法运算是否正确、主控判断是否去除无关影响等;试验结果显示,在试验中出现一次偏差,经过分析确定为主控中心受到探测模块所收集到的环境信息及光电编码盘检测轮速错误导致误判,经过对主控的调试后恢复正常工作,后续试验中未再出现。
在检测清洁后地面有无水渍时,结果显示出现两次偏差,经过调试分析确认为两个方面原因:一是风干模块在长时间连续工作后,机身温度升高导致加热效率下降;二是与出现路径偏差试验原因一样,光电编码盘检测轮速出现误差、主控对环境信息判断错误。具体解决是线路改用更阻热材料,减小线路升温,在参数分析方面将程序进行优化,改进上下机位连接方式。在针对以上两个问题调整后,后续多功能扫地机器人试验成功率达到100%。
4 结 论
本文主要完成了多功能扫地机器人的设计和结构改良,本设计主要为了解决机器人出水量过多、拖地过后地面潮湿的问题。通过对国内外已有扫地机器人综合分析,结合低成本、高效率的设计要求,本文对多功能扫地机器人进行整体设计,并通过样机实验分析,得出以下结论:
1)本文设计的一种阻隔板结合烘干地面的多功能扫地机器人,改良设计,新增加烘干地面功能,能够合理解决湿地面带来的二次污染、细菌滋生等问题。
2)清洁刷采用对称逆向设计,最大程度上扩大清洁区域,提高清扫效率。拖把设计可拆卸式采用魔术贴连接,结构简单,安装和拆卸方便。
3)设计阻隔板来控制出水箱水量,为了加固连接,设计卡扣固定连接拖把,并有调节推扭对阻隔板上下调节,控制出水量,使水箱出水量平稳。
4)光电编码盘对轮速的检测会偶尔出现偏差,在后续的研究需要针对探测和主控的判断进行优化。
5)在材料选择方面,应优先选择耐温材料,防止因温度升高造成工作效率下降或机器故障。
6)由于无线通信板传递信息时存在延迟,探测信息无法及时传递至主控中心导致误判。在后续研究中,应在电气元件方面进行优化,并提高程序判断能力,减少误判。
参考文献:
[1] 罗庆生,韩宝玲.一种基于超声波与红外线探测技术的测距定位系统 [J].计算机测量与控制,2005(4):304-306+334.
[2] 王鑫,徐鑫,魏强,等.基于DSP和光电编码器的永磁同步电机速度检测系统 [J].信息技术与信息化,2011(5):56-58.
[3] 郝新源.两相混合式步进电机智能驱动器的研究与设计 [D].济南:山东师范大学,2022.
[4] 王星宇,孙京诰.自清洁扫拖烘扫地机器人的设计与实现 [J].现代信息科技,2021,5(17):155-157+161.
[5] 王瑾,王峰图,范华,等.基于STM32扫地机器人的设计与实现 [J].国外电子测量技术,2018,37(11):100-103.
[6] 赵佳媞.扫地机器人的电路设计及路径规划算法优化 [D].昆明:昆明理工大学,2021.
作者简介:王云通(2003—),男,汉族,山东曹县人,本科在读,研究方向:机械设计制造及其自动化;桑俊垚(2001—),男,汉族,山东桓台县人,本科在读,研究方向:机械设计制造及其自动化;薛凯峰(1981—),男,汉族,山东莒南人,副教授,博士研究生,研究方向:微机电系统设计;顾宗磊(1980—),男,汉族,山东泰安人,讲师,硕士研究生,研究方向:计算机辅助设计。
收稿日期:2023-01-10
基金項目:山东省大学生创新创业训练计划(S202210452082)
