ROS 机器人室内导航定位的设计与实现
2023-08-09 07:08黄玉龙冯森泉谭锦元李金莲吴超琼
计算机应用文摘·触控 2023年15期
黄玉龙 冯森泉 谭锦元 李金莲 吴超琼
摘 要:如今,在科技发展下,互联网的高速发展衍生出了许多新兴技术和行业。智能化的发展在各个领域中不断涌现,如今智能化已是社会发展的必然趋势,而“人工智能”“机器学习”就是其中的热门话题。目前,ROS 技术也得到了广泛应用,ROS 被称为机器人操作系统平台,对实现机器人各个组件的通信有看完善的通信机制。而随着时间的推移,ROS 的强大让十分复杂的机器人变得越来越简单,基于ROS 的机器人解决了组件之间的通信速率问题。文章对机器人的自主学习导航定位进行了研究,利用 ROS 机器人的激光雷达对室内环境构建栅格地图,并使用 SL.AM定位等关键技术对位置进行即时定位与地图构建。该课题的研究不仅可以促进 ROS机器人的进一步发展,还可以为一些 GPS 不能覆盖或者覆盖较差的区域提供有力的支持,并且具有重要的理论和实际意义。
关键词:导航定位;Jetson;ROS 平台;激光雷达
中图法分类号:TP242文献标识码:A
1 机器人导航定位技术的现状分析
随着经济水平以及科技的不断发展,自主移动机器人成为互联网人工智能产业的一个重要节点。而作为新兴的科技产业,室内智能服务机器人也逐渐处于当今行业的风口浪尖,其中最具代表性的有扫地机器人、送餐机器人等。
在任何一个领域中,无论何种类型的智能机器人,只要能自主移动,都需要对所处的环境进行导航定位。在智能机器人领域中,自主导航定位技术是一项核心技术,它是赋予机器人感知环境和方向行动能力的关键,目前有多种导航定位技术可实现机器人在室内或室外环境中的导航定位。以下是对机器人常用的导航技术进行分析。
1.1 视觉导航定位
目前,在视觉导航定位系统中,最常采用的方法是基于局部视觉,即将摄像头安装在机器人身上作为车载摄像头的导航方式。这种通过摄像头的导航方式,是将传感装置和控制设备安装在机器人车体上,由车载控制计算机进行图像识别、路径规划等高层决策。普遍常见的视觉导航定位系统是借助摄像头、CCD图像传感器或者其他的快速信号处理器,对其目标物体周围的空间环境进行光学处理,主要是利用这些外部图像处理器进行图像信息采集,并对采集的图像信息进行压缩处理,然后将处理后的图像信息反馈到一个由神经网络与统计学方法构成的子系统,最后通过子系统采集的外部图像信息与目标物体进行实际的位置关联,从而完成目标物体的自主定位导航功能。
1.2 光反射导航定位
采用红外传感器或激光测距模块定位是目前典型的光反射导航定位方法,不论激光还是红外都是基于光反射技术的原理来进行导航定位的。激光全局定位系统[1](如激光雷达)一般由激光器旋转机构、反射镜、光电接收装置和数据采集与传输装置等组成;红外传感器是由一个用作接收器的固态光敏二极管和一个可以发射红外光线的固态发光二极管构成。不管是红外光线测距定位还是激光测距定位,其工作原理都是通过发射装置主动发射光信号,然后将其反射回来给接收装置,再经过信息处理得到其距离和位置。
1.3 GPS 全球定位系统
如今,GPS 导航定位技术是自主移动机器人能够实现自主移动导航定位功能的最先进的技术。随着GPS 的应用领域逐渐扩展以及应用需求的增加,GPS也在日益完善,差分GPS 定位技术的发展使得其定位精度也有了质的飞跃。
GPS 使用无线电传输来进行定位,通过卫星来传输定时信号、卫星的位置和其他信息。GPS 的组成有3部分:空间部分为GPS 卫星;监测部分为GPS 地面;用户部分为GPS 接收机。GPS 使用了交互定位的原理,若要确定一些未知的位置,则只需确定几个点之间的距离就可以做到。相较于GPS 而言,太空中的卫星是已知点,而未知点是地面上的某一个运动目标[2] 。
1.4 超声波导航定位
超聲波定位导航的工作原理类似于激光与红外定位,起初是由超声波传感器的探头发射超声波,当介质探查时,超声波遇到障碍物后会返回到超声波的接收装置。反射式测距法是超声波用于测距定位的方法,其利用多边定位等方法来确认障碍物或物体的位置,且一个主测距器和多个接收器便可以组成超声波定位系统。待测目标放置一个主测距仪,而室内的周围环境则放置接收器,当定位时,超声波导航的主测试器会向接收器发射同频率的信号,在接收器收到这个信号后就会反射信号给主测距器,然后通过回波信号和发射波信号的使用时间来进行时间差的计算,再根据时间差得出物体距离,从而确定定位位置。
1.5 SLAM 定位技术
SLAM (Simultaneous Localization And Mapping),也被称为CML (Concurrent Mapping and Localization),即即时定位与地图构建,或并发建图与定位[3] 。目前,SLAM 技术被广泛应用于机器人、无人机、无人驾驶、AR、VR 等不同领域,且依靠传感器就可实现机器的自主定位、建图、路径规划等功能。目前服务机器人行业领域的领先企业,80%都采用了SLAM 技术。SLAM 技术主要应用于机器人定位导航领域:地图建模[4] 。
2 ROS 机器人的系统设计
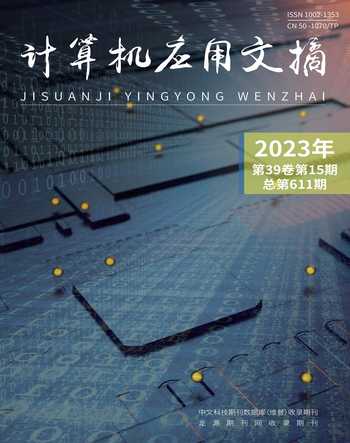
本文使用的ROS 机器人采用英伟达的JetsonNano 作为主控单元。机器人底部采用的是履带式运动机构,履带式机器人载重大,越障能力强,动力强,爬坡能力的也比较强,并且在崎岖地形环境下也很适合开展工作。机器人搭载的传感器主要是思岚科技公司的RPLIDAR A1 型单线激光雷达和奥比中光Astra Pro 深度相机,根据这2 个传感器件构造的导航定位系统实现了地图建模和路径规划,能够在一定空间范围内自动行走,并具备避障的功能。ROS 机器人的硬件系统结构图如图1 所示。
2.1 ROS 机器人的控制系统
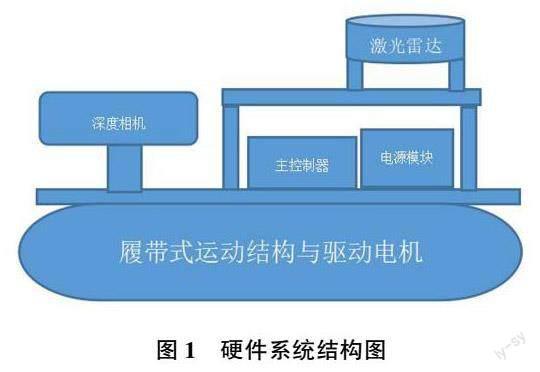
本文机器人的控制系统采用NVIDIA 2019 年发布的Jetson Nano 为控制中心的開发硬件,为嵌入式设计开发人员、科研人员以及一些制造DIY 的厂商提供了更多的可行性,并在大部分的AI 平台上展现了它的强大功能[5] 。Jetson Nano 模组不仅采用四核64 位ARM CPU 以及128 核集成NVIDIA GPU,而且提供472 GFLOPS 的计算性能。此外,Jetson Nano 还使用了4 GB LPDDR4 的存储器,使得系统整体的运行十分高效,还具备了5 W/10 W 的功率模式以及5 V 的直流输入。Jetson Nano 还对高分辨率传感器提供支持,同时并行处理多个传感器,且多个现代神经网络可以运行在同一个传感器上,目前主流的人工智能框架Jetson Nano 都是支持的。Jetson Nano 模块如图2所示。
2.2 ROS 机器人的导航定位与避障系统
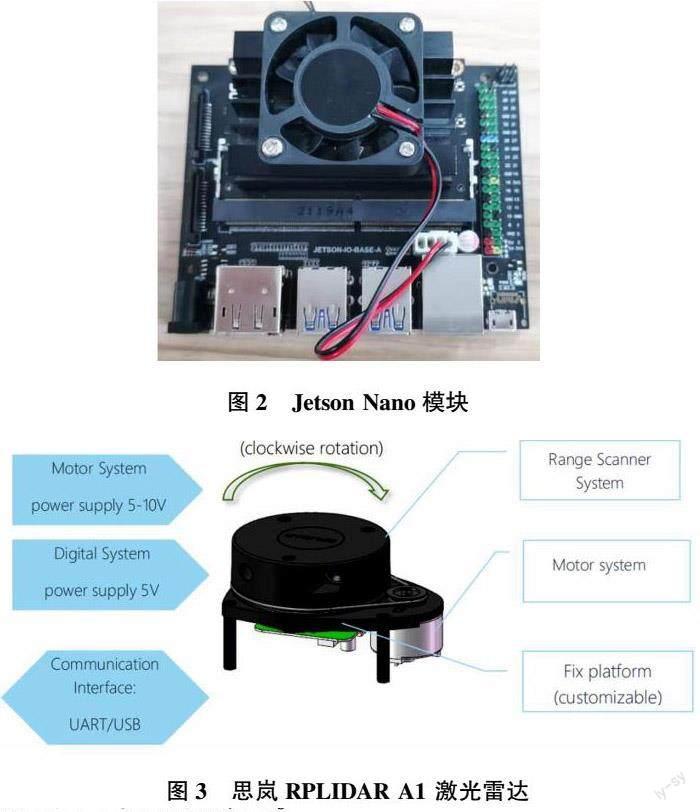
ROS 机器人的传感器数据采集依靠的是基于三角测距技术的思岚RPLIDAR A1 型单线的激光雷达,如图3 所示。该雷达具有半径为12 m 的测量范围,采用激光三角测距技术,其每秒的测距动作可达到8 000次以上。测距核心旋转的方向是顺时针,并且可实现对周围的环境360°全方位的扫描测距检测,以获取周围环境的轮廓图。
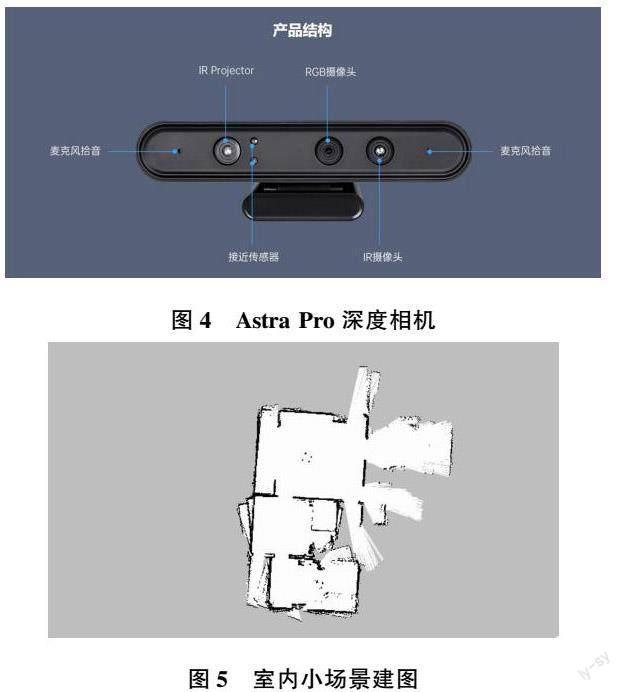
在雷达实现构造建图的基础上,搭配ORBBECAstra Pro 深度相机可实现三维建图导航定位。ORBBEC Astra Pro 3D 传感摄像头采用单目结构光技术,具有精度高、功耗低、响应迅速、稳定可靠的优点。用户可以在短距离、长距离和高分辨率RGB 摄像机之间自由地切换,以满足个性化需求。其中,AstraSDK 还支持多种主流平台,通过API 即可使用Astra系列相机的相应功能,从而快速获取深度图、彩色图、骨架,以及对产品进行更多的应用层开发。Astra Pro深度相机如图4 所示。
3 ROS 机器人导航定位设计
3.1 激光雷达建图算法
ROS 机器人的激光雷达通过使用SLAM 框架的常用开源SLAM 算法Gampping 建图算法来实现导航的算法。Gmapping 建图算法是一种基于粒子滤波的激光SLAM 算法。该算法已被集成在ROS 中,在目前Gmapping 建图算法在移动机器人中应用最多[6] 。作为表示路径的后验概率都是粒子滤波的算法用许多加权粒子来实现的,虽然每一个粒子都有一个重要性因子,但若要得到较好的结果,则需要大量的粒子。因此,大量的粒子使得该算法的计算复杂性不断增加。此外,退化耗尽的粒子在与PF 重采样的过程中会降低相关算法的准确性。
Gmapping 算法的最大的优点是可以实时构建扫描出室内地图,在使用该算法去构建室内小场景地图时,所需的计算量较小且精度较高不会造成地图错位[7](如图5 所示)。而Gmapping 算法的缺点是场景越大所需的粒子就越大,计算量也会随之增加,从而导致工程量过大,因此十分不适合构建大场景地图以及室外大范围的场景。粒子量大会使在回环时没有检测,在回环闭合时极大可能会造成地图错位、精确度不高等问题。
3.2 激光雷达导航设计
作为机器人导航最主要的核心,路径规划是利用周围环境障碍物的信息找到一条最近且在路程中消耗最小的路径。通常全局路径规划和局部路径规划是在导航中会用到的2 种路径规划[8] 。全局的路径规划更像是一种战略性策略,需要考虑全局,规划出一条尽量短且易于执行的路径。在全局路径的指导下,机器人在实际行走时还需要考虑周围实时的障碍物是否阻碍,然后制定避让障碍物的策略,这就是局部的路径规划所要完成的事,可以说机器人的自主导航最终是由局部路径规划一步步完成的。ROS 中推荐的全局路径规划器是GLOBAL_PLANNER。
4 结束语
一个机器人的组件安装,往往是由不同厂家制作出来的,其协议也会有所不同,从而导致机器人的制作变得比较繁琐,ROS 的出现则完全解决了这个问题。本文研究的ROS 机器人室内定位解决的是GPS信号覆盖差或者无法覆盖的问题,是以机器人为覆盖中心,对周围环境进行扫描,然后精准定位。模块式开发已然成为应用系统或嵌入式系统的主流开发模式,而ROS 便是做这个的,因此在机器人的发展中,ROS 无疑有着很好的发展前景。而基于ROS 开发的系统在后期维护上也有着很大的优势。
参考文献:
[1] 张一栋.用于自主移动机器人的导航定位技术分析[J].集成电路应用,2017,34(2):62?65.
[2] 杨子俊,廖凤英,韦庆.GPS 在移动机器人导航定位系统中的应用[J].舰船电子工程,2005(6):5?7+73.
[3] 白云裳,刘猛,冯酉鹏.基于激光雷达SLAM 室内定位方法[J].中国新通信,2019,21(16):52.
[4] 黄鹤,佟国峰,夏亮等.SLAM 技术及其在测绘领域中的应用[J].测绘通报,2018(3):18?24.
[5] 艾炎,唐艳玲,潘佳佳,等.基于ROS 的全局路径规划设计与实现[J].湖北农机化,2021,(13):121?122.
[6] 邓轲,金光,江先亮.基于ROS 的室内导航机器人设计与实现[J].无线通信技术,2018,27(4):27?30.
[7] 欧资臻.室内移动机器人的自主导航技术研究[D].宜昌:三峡大学,2022.
[8] 张明岳.基于ROS 的室内自主移动与导航机器人研究[J].微处理机,2021,42(5):45?48.
作者简介:
黄玉龙(2001—),本科,研究方向:物联网应用。
吴超琼(1990—),硕士,研究方向:物联网应用与嵌入式系统应用(通信作者)。
猜你喜欢
北京测绘(2022年5期)2022-11-22
中国交通信息化(2021年8期)2021-11-02
汽车观察(2021年8期)2021-09-01
空间科学学报(2020年6期)2020-07-21
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
电脑知识与技术(2016年24期)2016-11-14
美与时代·城市版(2016年8期)2016-11-10
知音励志·社科版(2016年9期)2016-11-09
企业导报(2016年14期)2016-07-18