空间站任务规划系统管理研究
2023-08-17 06:37陈状韩樾夏胡雨欣张伟
科学 2023年4期
陈状 韩樾夏 胡雨欣 张伟
空间站因其近地轨道位置以及长时间处于微重力、强剂量辐射的独特环境,被多国视为太空实验室,研究价值得到广泛认可。早在1984年,美国就希望与其他国家合作建立一个“永久性空间站”。在1990年代俄罗斯加盟后,国际空间站计划正式启动。1998年,曙光号功能货舱发射成功,标志国际空间站正式开始建设。直至2011年,所有舱段和设备组装完成,国际空间站进入运营阶段。
虽然国际空间站建设周期长、投入巨大,但是获得的科研成果丰硕。开展的实验项目涉及生物学与生物技术、技术开发与验证、教育活动与推广、人体研究、物理科学、地球与空间科学等六大研究领域数十个研究方向[1-2]。截至2021年11月,国际空间站科研活动已经产出2377份科学成果出版物。
任务规划系统是供任务规划者参考使用的规划工具,科研活动的顺利执行与其密切相关。空间站的任务规划受时间需求、设备功率、设备支持能力、上下行能力、航天员工时等复杂约束条件的限制。上行实验项目耗费的资金、有效载荷资源、运载能力资源等都非常宝贵,项目培育也会耗费大量的资金和资源,因此任务规划是一项极其重要的工作。
美国国家航空航天局任务规划发展脉络
美国国家航空航天局(NASA)任务规划系统合理规划各项应用资源,保障航天器的稳定运营,解决了阿波罗登月工程、天空实验室工程、航天飞机工程、国际空间站工程等不同阶段面临的实际难题。
阿波罗登月工程阶段的任务规划属于短周期、集中式。该计划使用月球轨道交汇法,解决了飞行步骤复杂、步骤精确度要求高的难题。集中式规划使得规划者能够访问有关运营任务的所有信息、任务发起人的目标和优先级,以及可能影响运营计划的所有约束,保证登月计划顺利进行。
天空实验室工程阶段的任务规划属于长周期、分布式。工程的每个载人航天任务通常持续数十天,而在任务开展之前均会制定一份完整详细的计划。计划每12小时修订一次,任务期间24小时轮班工作。这样的规划方式有著极好的科学回报,但存在劳动强度极大、难以长期操作的弊端。

航天飞机工程阶段既有集中式的飞行任务,也有航天飞机与“和平号”空间站的联合飞行任务。这一阶段进行的太空实验室工程的任务规划回归阿波罗工程阶段的短周期,产生了PLAN-IT、SLS-PLAN-IT、PLAN-IT-2等大量的规划工具,降低了规划工作的难度。PLAN-IT是喷气推进实验室开发了四年、基于人工智能的交互式图形时间轴编辑器。SLS-PLAN-IT是用于支持空间实验室生命科学任务-Ⅰ(SLS-Ⅰ)期间的实时反应式调度任务软件。PLAN-IT-2对PLAN-IT做了进一步改进,考虑了太空实验室多个规划层次的资源约束,可随着任务目标和需求的变化,适应相应的规则和策略。
国际空间站的主要成员国各自开发了任务规划系统,其中当属美国开发的任务规划系统最多。如集成规划系统(integrated planning system, IPS)用于规划航天飞机任务和国际空间站任务,统一规划系统(consolidated planning system, CPS)是其核心子系统[3];载荷规划系统(payload planning system, PPS)由马歇尔飞行中心开发,主要是对有效载荷进行规划[4];站载短期计划查看器(on-board short term plan viewer, OSTPV)适用于查看短期计划,并允许对计划进行有限的规划[5];运营规划时间轴集成系统(operations planning timeline integration system, OPTIMIS)利用技术改进和简化任务规划[6];Playbook是一款专为航天员设计的计划执行工具,具有约束检查和违规可视化的协作自调度、完整活动执行状态查看、任务列表查看等功能[7]。
国际空间站任务规划发展阶段
随着任务需求的多样化、规划技术的进步,国际空间站的任务规划系统也不断创新和迭代。根据系统更替的大事件,国际空间站任务规划的发展分为多层递阶规划、一体化协同和自调度三个阶段。由于航天工程复杂性极高,任务规划系统都有预研阶段,且系统更替过程中存在逐步迭代,因此各阶段在时间上会有重合。
多层递阶规划阶段(1980年代—2015年)
在多层递阶规划阶段,复杂的空间站规划被分解为不同颗粒度(granularity)的规划子问题。每个子问题产生的解均作为下一个子问题的输入,逐步分解,形成递阶结构。需要指出的是,NASA将空间站规划划分为战略规划、战术规划、任务级规划、执行级规划四个层次,并将其确定为基线(baseline)。
集成规划系统和载荷规划系统主要针对任务级规划层级,其分布格局在天空实验室工程阶段形成。集成规划系统主要用于规划飞行任务、后勤维护、资源管理等,载荷规划系统主要用于规划有效载荷。各国开发的各种规划系统都使用集成规划系统进行集成整合,详细计划国际空间站在轨活动,生成和分析地面活动、在轨活动的时间和安排,实施多项资源编排。站载短期计划查看器针对执行级规划层级,是有一定规划功能的任务查看器。任务级规划由集成规划系统生成,再细分为执行级规划加载到站载短期计划查看器。
集成规划系统属于交互式任务规划与资源管理系统,其研发工作早在1980年代就已启动。该系统根据任务需求与约束进行任务规划,功能包括任务规划、资源调度、约束检测等,主要用于飞行任务规划、平台规划和规划集成,能够开发针对整个增量期间的精确到某天的计划、一周内将执行任务的综合计划、三天任务的综合计划等。它可为各国同时处理时间线,集成各国规划方案,发展出时间线分离与集成法。
载荷规划系统从2006年开始启用,是专门为满足空间站分布用户的有效载荷规划需求而设计的规划系统。其采用资源分层法和资源包络法以适应多层递阶结构的特点。资源分层法使得规划者了解每一级的所有资源请求,从而确保资源的合理分配,更好满足规划需求[8]。资源包络法是将未被占用的设备负载能力、功率等资源打包成多个资源包络,灵活分配给有需要的运营任务,能够有效衔接有效载荷规划从各个规划中心到总体的集成过程,协助统一规划系统进行系统整体层面的规划。

站载短期计划查看器于2007年发布了最终版本。它起初是为了方便检测数据传输活动是否违反国际空间站的S波段约束,后来逐渐演化成为航天员和地面控制人员用来查看和操作国际空间站短期计划的工具。站载短期计划查看器的输出界面是递阶规划的最后一步,展示任务的开始时间、持续时间以及资源分配与使用方案。航天员可通过它查看当前的短期计划,包括任务甘特图、空间站轨道相关信息、通信覆盖范围和航天员执行任务相关信息等。

多层递阶规划是国际空间站得以成功运营的重要基础,影响深远,后续的空间站规划研究都是在此基础上的延伸与改进。
一体化协同阶段(2012年—)
一体化协同阶段在多层递阶规划阶段的基础上,进一步加强各规划层次间的联系,简化跨系统平台的规划集成。此阶段涉及的运营规划时间轴集成系统由约翰逊空间中心与艾姆斯研究中心共同开发。它是利用技术升级和协同简化的规划系统,主要包括Score、规划存储库、WebAD、OPTIMIS Viewer等組件。运营规划时间轴集成系统在集成规划系统的结构基础上进行了进一步升级完善,其各子系统基本与多层递阶规划阶段的各子系统对应,技术上完成了迭代升级,比起前一阶段有了较大提升:无需多个规划系统的跨平台操作,将多个不同的规划工具整合到一个规划系统和流程中。
自调度阶段(2016年—)
随着太空探索的深入,空间任务愈加复杂,目前,任务控制中心无法对不确定性任务变更、环境影响等突发情况进行实时快速的响应。航天员在长期探索任务(long-duration exploration missions, LDEM)中比在近地轨道飞行任务中需要进行更多自调度权限进而实现任务。
NASA由此提出航天员自调度的运营概念,以应对长期太空探索会出现的响应不及时问题。具体内容为,航天员借助规划系统和软件自行安排时间表,规划中心从地面转移到航天器中,规划者由地面的计划员转为航天员。未来,机组人员需要在不违反资源可用性、任务顺序等约束条件下,仅靠自身重新安排时间表。Playbook在此背景下由NASA设计开发,这是一种自调度软件的应用,应被视为人类长期太空探索的一项科学实验。
任务规划系统管理理念
“系统工程”是组织管理“系统”的规划、研究、设计、制造、试验和使用的科学方法。NASA 系统工程体系始建于1980年代后期。挑战者号航天飞机失事后,NASA认识到每一项航天计划和项目都是一项复杂的系统工程,于是开始着手全面构建航天系统工程的过程与要求的规章和标准,并在后续工作中不断完善。
结构分解
系统工程将系统作为一个整体进行分析,厘清总体中各部分之间的相互联系和相互制约关系,并使这些部分服从整体优化要求。NASA系统设计的基本步骤[9]如下:第一,考虑初步概念方案和关键系统,确定任务需求。第二,建立逻辑分解模型/图表,将需求转变为视图并显示它们的关系。第三,将子组件视为一个独立产品,考虑新需求和派生需求,进一步向下分解,分解形成子组件后重复,直至最底层。
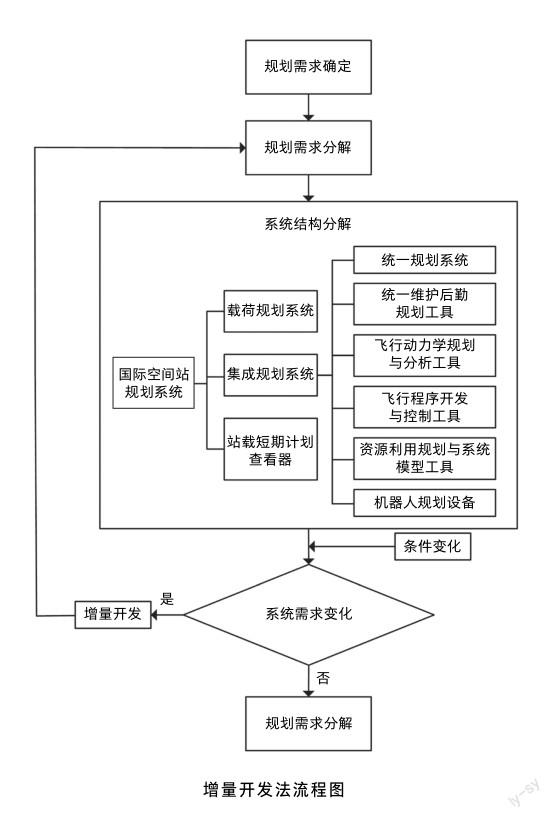
以国际空间站规划系统为例,它的集成规划系统不仅负责规划集成,还负责飞行任务规划和平台规划,因此,包括了统一规划系统、统一维护后勤规划工具、飞行动力学规划与分析工具、飞行程序开发与控制工具、资源利用规划与系统模型工具以及机器人规划设备等。国际空间站规划系统不断向下分解,各个系统分解成子系统,彼此之间紧密联系,相应功能不断完善,共同构成一个完整的规划系统。
整体与局部协调
系统工程在分析局部问题时,是从整体的需要出发来寻求问题的解决方法。NASA在进行多个规划方案的集成时,考虑了系统工程的管理理念,规划系统中产生了多种方法进行规划的集成。
以有效载荷规划为例,先由载荷规划系统对实验任务进行规划,选用资源分层法和资源包络法进行分布式规划。资源分层法使需求自下而上层层传递,规划者只需针对结构的每个级别分别进行规划。布什(J. L. Bush)等[10]在1987年为国际空间站研发的资源包络法能够协调不同级别的有效载荷任务并分别进行规划。
在载荷规划系统完成载荷规划后,国际空间站还需要通过统一规划系统对包括载荷规划在内的多项活动进行编排。为协调规划系统整体与局部的关系,统一规划系统采用了一种合并时间线数据的方法——时间线分离与集成法。时间线分离用于创建时间线的子集,以便多个用户同时处理同一时间线。子集创建后,用户可对任一时间线进行更新,然后使用时间线集成将更新合并至主时间线。
应对需求变化
系统开发的一般流程是首先确定规划需求,再对规划需求进行分解,从而设计不同系统与子系统以实现相应的功能。然而,在系统开发的概念研究项目阶段到初步设计项目阶段之间的进一步权衡研究和分析,可能会导致需求发生变化。NASA开发团队运用系统工程方法,设计出增量开发法以适应不断变化的用户需求[11]。增量开发法能够满足不断变化的需求,应对系统的外部变化,使得整个系统处于不断改善的状态。
它在添加新功能时,将新功能作为核心功能的附加部分进行迭代。整个流程形成闭环:将新增的需求再次分解,设计出相应的子系统以满足要求,之后再次判断需求是否变化,直至需求不再变动,最终形成基线。同时,NASA还要求所有变更必须进行评估,以确定其对各层次需求的影响。
若干启示
当前,中国空间站正处于建成运营初期,任务规划系统需进一步搭建。国际空间站任务规划系统的设计经验则可为中国建立系统、全面、高效的空间站任务规划系统提供重要参考。
注重系统性思维,加强顶层设计 加强空间站任务规划顶层设计,在操作方面,有助于形成结构清晰、层次清楚的规划系统,极大简化操作流程,显著提升规划效率;在协调方面,有助于分析多个层级任务之间的相互作用关系和制约关系,提高资源利用效益。
全面考虑规划要素,提供连续性规划方案 充分考虑各类规划要素,分析各个要素的属性,以生成全面的规划方案,从而有助于实现空间站的复杂约束,提升方案可行性。通过检验规划周期内各离散时间段的开始时间和结束时间,实现连续规划,有助于保证短期任务规划和总体任务规划方案的连续性,增强对系统外部变化的适应性。
明確任务先后关系,提升规划效率 规划效率是保证空间站各项任务高效开展的又一重点。中国空间站任务规划系统设计应分析各项任务的关键信息,明确任务的先后关系,并满足任务开始时刻与结束时刻的约束,从而大幅减少计算量,突破计算速度的限制。
未来,中国空间站任务规划系统的设计应满足任务规划的需求,符合空间站实际情况,从全局层面考虑多层次任务的协调规划问题,加强对规划要素、规划时期的全面分析,有效梳理各项任务的执行顺序,生成高效、可行的任务规划方案,提升空间站运营效率。
[1] THUMM T L, ROBINSON J A, BUCKLEY N, et al. International Space Station benefits for humanity//The 63rd International Astronautical Congress(IAC2012). Naples: IAF, 2012:3780-3789.
[2]韩淋,王海名,范唯唯,等. 2020年国际空间站科研与应用进展.载人航天, 2021, 27(4): 530-536.
[3]POPOV A. Mission planning on the International Space Station program, concepts and systems//IEEE Aerospace Conference. Piscataway: IEEE, 2003: 3427-3434.
[4]HAGOPIAN J, HOWELL E. Architecture for Payload Planning System (PPS) software distribution//Space Programs and Technologies Conference. Huntsville: AIAA, 1995: 1-6.
[5]FRANK J, MORRIS P H, GREENE J, et al. The challenge of evolving mission operations tools for manned spaceflight//The International Symposium on Artificial Intelligence, Robotics and Automation in Space. Los Angeles: IEEE, 2008: 1-9.
[6]SMITH E E, KORSMEYER D J, HALL V. Exploration technologies for operations]//SpaceOps 2014 Conference. Pasadena: AIAA, 2014: 1-10.
[7]MARQUEZ J J, HILLENIUS S, HEALY M. Increasing human spaceflight capabilities: Demonstration of crew autonomy through self-scheduling onboard International Space Station//International Space Station Research & Development Conference. San Francisco: NASA, 2018: 1-22.
[8]HAGOPIAN J, MAXWELL T, REED T. A distributed planning concept for space station payload operations// The 3rd International Symposium on Space Mission Operations and Ground Data Systems. Greenbelt: NASA, 1994: 287-294.
[9]HIRSHORN S R, VOSS L D, BROMLEY L K. NASA systems engineering handbook. Washington, D.C.: NASA Headquarters, 2017.
[10]BUSH J L, CRITCHFIELD A, LOOMIS A. Space station Platform Management System (PMS) replanning using resource envelopes//1987 Goddard Conference on Space Applications of Artificial Intelligence(AI) and Robotics. Greenbelt: NASA Goddard Space Flight Center, 1987: 1-17.
[11]SAINT R. Lessons learned in developing an international planning software system//SpaceOps 2002 Conference. Houston: American Institute of Aeronautics and Astronautics, 2002: 1-10.
关键词:空间站 任务规划 规划系统 系统工程 系统设计 ■
猜你喜欢
军事文摘(2022年18期)2022-10-14
中国交通信息化(2022年6期)2022-08-30
军事文摘(2022年12期)2022-07-13
小天使·三年级语数英综合(2022年4期)2022-04-28
军事文摘(2021年18期)2021-12-02
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年22期)2016-10-18
铁道通信信号(2016年3期)2016-06-01
小说月刊(2015年3期)2015-04-19
上海理工大学学报(2011年6期)2011-03-20