BDS-3观测评估及其PPP随机模型构建
2023-08-26 03:06肖晶鑫李浩军
导航定位学报 2023年4期
冯 畅,肖晶鑫,李浩军
BDS-3观测评估及其PPP随机模型构建
冯 畅,肖晶鑫,李浩军
(同济大学 测绘与地理信息学院,上海 200092)
针对北斗三号全球卫星导航系统(BDS-3)精密单点定位(PPP)数据处理中传统随机模型存在局限性的问题,在评估BDS-3观测值精度的基础上,提出一种构建BDS-3 PPP随机模型的方法:采用单站BDS-3观测进行其相位、伪距观测精度评估;然后根据评估结果设定BDS-3 PPP中观测的权重比,并考虑BDS-3观测时空差异以及BDS-3不同类卫星观测精度差异;最后利用100个国际全球卫星导航系统(GNSS)服务组织(IGS)测站的观测数据进行了实验验证。结果表明,应用该方法的精密单点定位收敛时间平均可缩短8~10 min,1 h平均三维定位精度可提升4.6 cm,2 h平均三维定位精度可提升3.4 cm,能够有效提高BDS-3静态精密单点定位的性能。
北斗三号全球卫星导航系统(BDS-3);精密单点定位(PPP);随机模型;观测精度评估;伪距相位比
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)经过多年发展,在交通、渔业、水文、气象、通信等行业得到了广泛应用[1]。GNSS导航定位是通过利用导航卫星相位、伪距观测值进行位置参数解算来实现。GNSS有2种定位模式,即基于双差观测模型的基线解算和采用非差观测的精密单点定位(precise point positioning,PPP)[2-3],其中PPP以其独特的优势具有广泛的应用前景[4]。GNSS PPP数据处理中,通常采用最小二乘方法进行参数的求解。最小二乘最优解的前提是使用精确的函数模型与恰当的随机模型[5];合理的随机模型是获取GNSS高精度定位结果的先决条件之一。随机模型由观测值方差因子及其方差构成,其描述了观测值本身的精度水平和随机特性[6]。
GNSS PPP随机模型中方差刻画了GNSS相位与伪距观测值的精度,目前大多以经验方法获得。文献[7]指出尽管伪距观测值噪声较大、精度比相位观测值低2~3个数量级,但伪距观测值对PPP解算参数精度有重要的贡献。目前,GNSS PPP数据处理中常用的有高度角随机模型和载噪比随机模型,如在文献[8]中将观测噪声表达成卫星高度角或接收机信噪比(signal to noise ratio,SNR)的函数。除采用先验方差进行的随机模型构建,验后方差分量估计的方法也有较多研究。文献[9]提出的赫尔默特(Helmert)方差分量估计(HVCE)、文献[10]提出的最优二次无偏估计(BIQUE)、文献[11]提出的最小二乘方差分量估计(LS-VCE)等方法通常使用残差估计观测值方差,主要用于后处理分析,但其普遍受函数模型影响。文献[12]采用零基线、短基线等双差观测模型进行观测评估与分析,但其不适应于采用单站观测的PPP定位数据处理[11]。传统PPP中相位、伪距观测值权重通常设置为常数,根据经验来设定无电离层组合相位和伪距的标准偏差比值,如1∶100[13]。显然,以经验方法确定的相位伪距权重比忽略了各类观测条件下不同接收机GNSS观测精度的差异[14]。
随着北斗三号全球卫星导航系统(BeiDou-3 global navigation satellite system,BDS-3)于2020年7月31日正式开通全球服务,其观测精度评估与定位性能提升一直是国内外学者研究的热点。由于BDS-3独特的星座设计,其由3颗地球同步轨道(geosynchronous orbit,GEO)卫星、3颗地球倾斜同步轨道(inclined geosynchronous orbit,IGSO)卫星和24颗中圆地球轨道(medium Earth orbit,MEO)卫星构成。文献[15]研究表明,3类轨道卫星观测精度互不相同,与全球定位系统(global positioning system,GPS)观测精度也有一定差别[16],目前BDS-3 PPP数据处理大多沿用GPS PPP随机模型的构建方法,合理性不强。因此,本文基于BDS-3观测值精度评估,利用评估结果建立相应的PPP随机模型,以提升BDS-3 PPP定位性能,为BDS随机模型的完善提供参考。
1 数学方法
通常PPP数据处理中采用双频无电离层组合(ionosphere-free,IF)作为函数模型。因此,本文采用单站BDS-3相位和伪距无电离层差值组合的残差,进行BDS-3 GEO、IGSO和MEO不同类卫星观测值精度评估,并以此确定不同类型卫星的PPP数据处理中的伪距、相位对应权重,实现BDS-3 PPP随机模型构建。
1.1 PPP模型
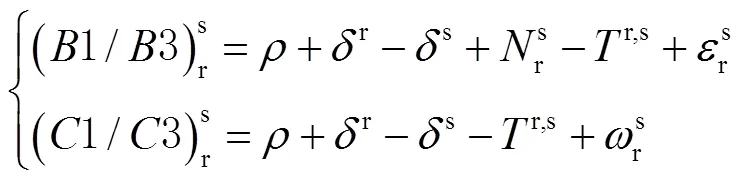
PPP采用单站无电离层延迟组合进行解算,无电离层延迟相位、伪距组合为
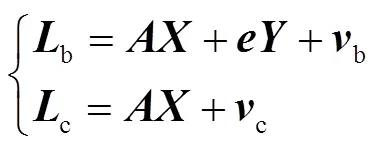
PPP数据处理采用了国际GNSS服务组织(International GNSS Service,IGS)卫星轨道和钟差产品,抵消了其相应误差影响。同时,对各种误差如固体潮汐、相位缠绕等进行了改正。相应的线性化方程为

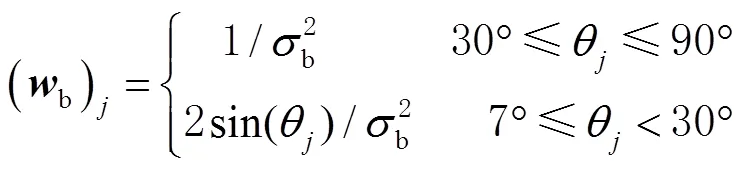
随机模型通常表示为对角矩阵,BDS载波相位观测值随机模型的对角元素定义为

1.2 BDS-3观测值精度评估
BDS无电离层相位、伪距组合相减可以得到

则无电离层相位、伪距差值的延迟标准差为

则无电离层延迟相位、伪距组合差值对应的残差表示为

对于GNSS接收机,跟踪颗BDS卫星,即可使用平均RMS评估观测值的精度为
对于BDS测站,可以分别求得GEO、IGSO和MEO卫星的平均RMS进行观测值精度分类评估,即
1.3 PPP随机模型构建


在PPP随机模型构建中,根据式(12)计算得到相位与伪距无电离层组合差值的平均RMS之后,在已知相位观测精度的情况下,即可确定无电离层延迟相位、伪距观测组合对应的精度比为
由于BDS-33类星座卫星观测精度存在一定差异,依据该方法可进一步对GEO、IGSO、MEO卫星分别进行相位伪距观测值定权为
式中r表示BDS-3某一类卫星对应相位伪距观测值权重。
2 实验与结果分析
2.1 数据准备与处理策略
为了验证本文提出的BDS-3 PPP随机模型构建方法,利用2022-08-15和2022-08-16100个IGS测站观测数据,采用3种方法进行数据处理。由于相位观测值精度高,目前国际主流GNSS数据处理软件将相位噪声均设置在毫米级。在本文方法1中相位、伪距观测标准差采用常数比1∶100;方法2中,在相位观测精度为0.001 m情况下,采用式(15)进行相位、伪距观测标准差比值计算;方法3中,在相位观测精度为0.001 m情况下,采用式(16)分别进行BDS的GEO、IGSO和MEO卫星相位、伪距观测标准差比值计算。100个IGS观测站分布如图1所示。数据处理中轨道和钟差均采用德国地学中心(German Research Centre for Geosciences,GFZ)的数据分析产品。以IGS提供的周解测站坐标进行PPP解算结果对比。PPP数据处理策略如表1所示。为了验证各种方法对应PPP的定位性能,分别从定位精度和收敛性2个方面来分析。其中参数收敛时间定义为定位结果在东(E)、北(N)和垂直(U)3个方向的偏差均小于10 cm时的所用时间。

图1 BDS-3选取测站的分布情况

表1 PPP处理策略
2.2 观测精度分析
如图2、图3所示为2022-08-15和2022-08-16代表性站点的BDS-3各卫星无电离层相位伪距差值组合的残差RMS统计结果。由图可知,对于同一站点而言,1 d内不同卫星观测值的精度差异较为明显,这主要受伪距观测噪声差异影响。而各个站点因为观测条件的复杂性不同,对于同一颗卫星的观测精度也有不同程度的差别。

图2 2022-08-15代表站点BDS-3各卫星观测值精度评估
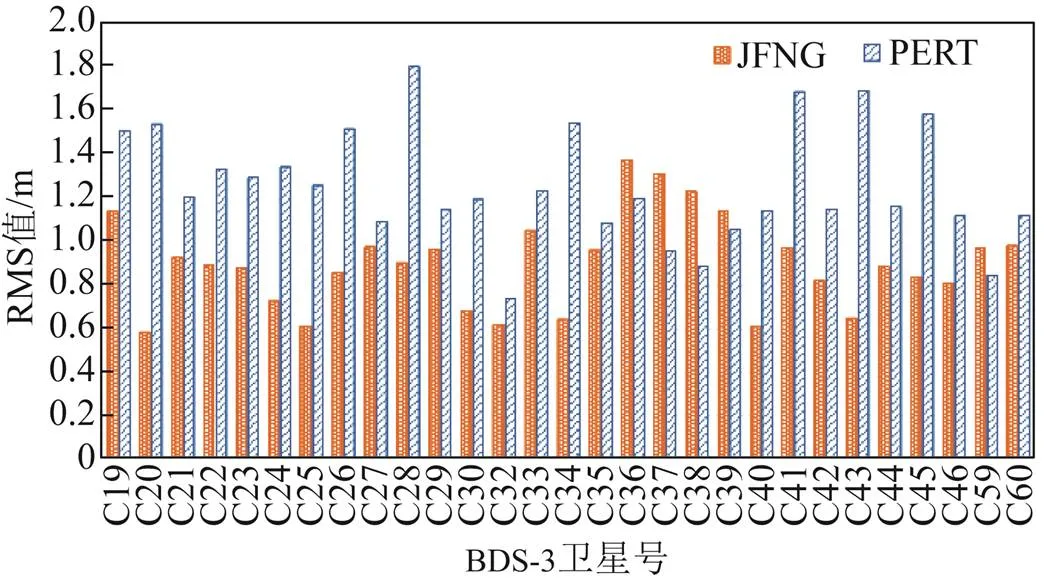
图3 2022-08-16代表站点BDS-3各卫星观测值精度评估
如图4所示为10个代表站点2 d的BDS-3 3类卫星无电离层相位伪距差值组合残差RMS平均值统计结果。结合如表2所示的所选26个站点2 d观测评估平均RMS统计结果来看,对于大部分测站来说,BDS-3 GEO卫星观测精度最优,IGSO卫星次之,MEO卫星观测精度相对最低。这可能是因为地球静止轨道卫星与地面测站位置可认为相对不变,观测条件较为稳定,而中圆轨道卫星相对测站运行周期短,导致相应观测组合残差RMS较大[15]。因此,在PPP解算过程中,结合BDS各类卫星观测精度评估结果进行分类定权显得较为必要。
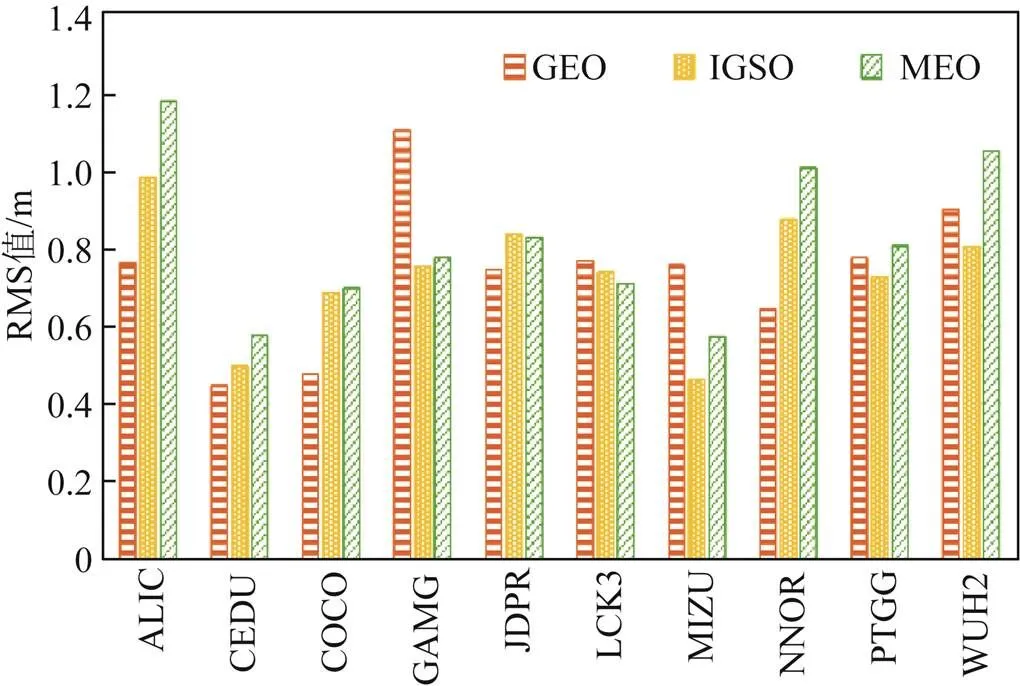
图4 代表站点BDS-3卫星分类观测值精度评估

表2 BDS-3各类卫星无电离层相位伪距差值组合残差平均RMS m
2.3 随机模型在PPP中的应用
为直观体现随机模型对定位收敛的影响,如图5和图6所示,分别给出5个代表站点2022-08-15在东、北和垂直方向的1和2 h静态PPP定位精度比较。从图中可以看出,方法2、方法3相较于方法1在北、东和垂直方向上均具有较好的精度提升效果。
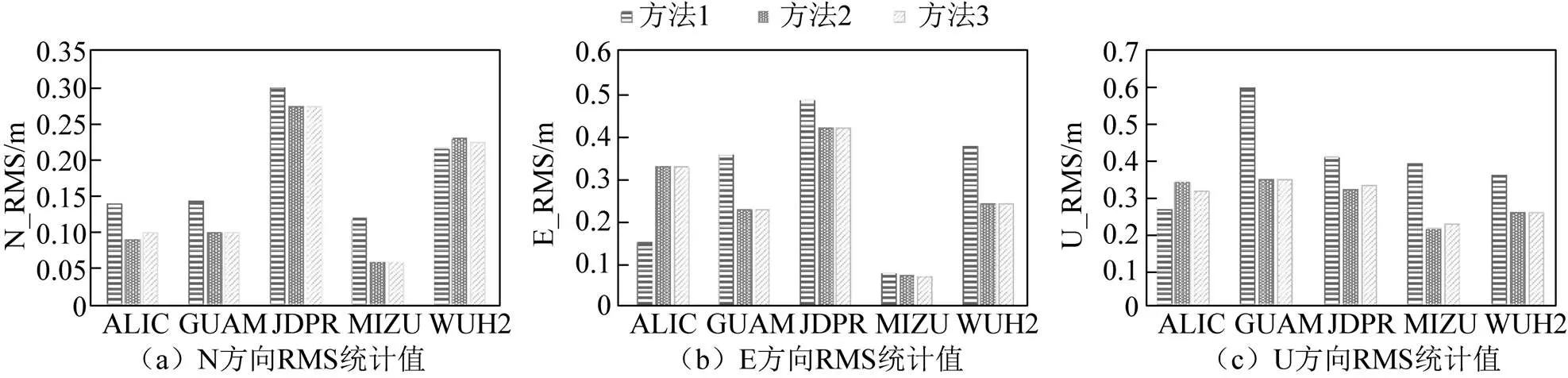
图5 3种方法BDS-3静态PPP 1 h定位精度比较
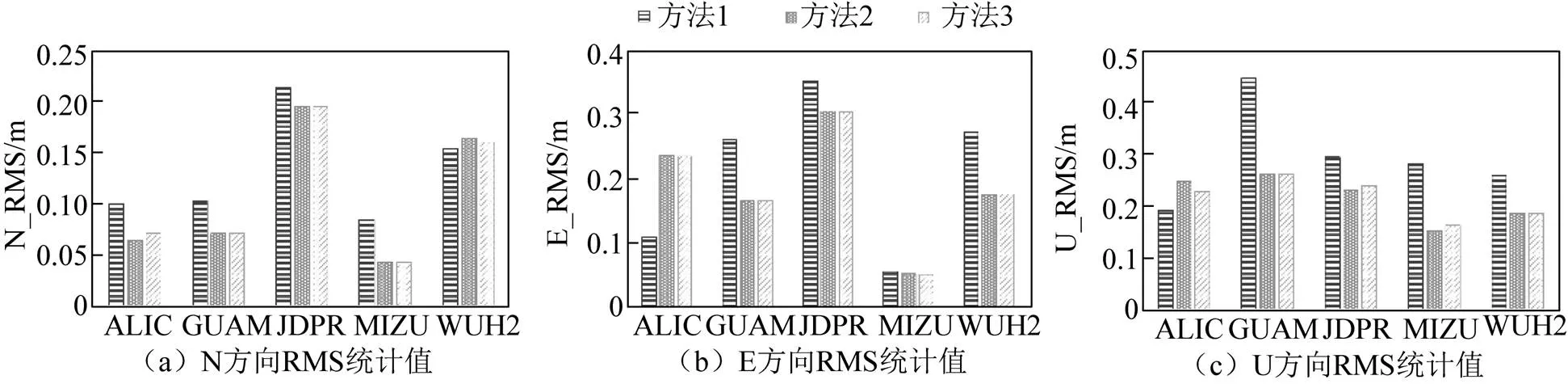
图6 3种方法BDS-3静态PPP 2 h定位精度比较
如表3所示为100个实验测站方法2相对于方法1进行1和2 h静态PPP平均定位偏差RMS 2 d的定量统计结果。由表可知,相较固定比方法1而言,垂直方向平均精度提升较为明显,约为 5 cm左右,北方向精度也有一定程度的改善效果,而对东方向的定位精度影响并不稳定。

表3 方法2相对方法1 BDS-3静态PPP 1 h和2 h平均定位偏差RMS提升量
如表4所示为26个实验测站运用方法2和方法3比方法1 PPP平均定位偏差E、N、U方向RMS提升量的统计结果。2种随机模型方法1和2 h的三维定位精度相比于方法1均有一定提升效果,且方法2和方法3精度相当。

表4 方法2和方法3相对方法1 BDS-3静态PPP 1 h和2 h平均定位偏差RMS提升量
总体看来,观测精度评估定权方法的运用由于考虑到了接收机观测值的具体精度情况,所确定的伪距相位比更符合实际观测值误差的真实分布,从而能够有效提高静态PPP定位精度。
为了直观分析3种方法运用于静态PPP的收敛特性,如图7所示,代表性地给出部分站点BDS-3固定比、观测精度评估定权和卫星分类观测精度评估定权方法1 d内前240个历元的定位误差时序。可以看出,使用观测值精度评估定权方法构建的随机模型能够明显加快精密单点定位的收敛速度,且收敛稳定性不会受到太大影响,可以在一定程度上改善PPP收敛时间较长的问题。
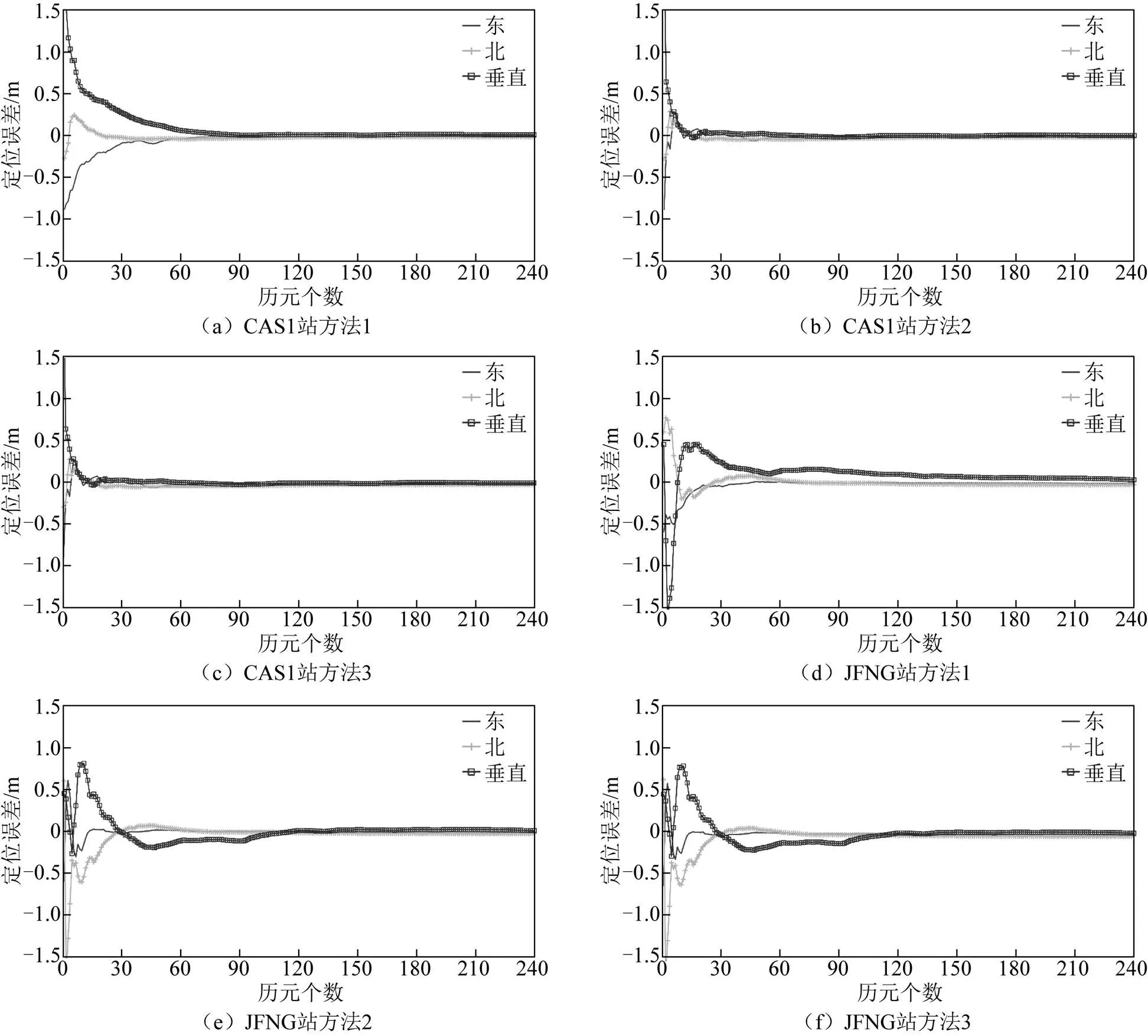
图7 2022-08-16代表站点BDS-3静态PPP定位误差时序
如图8所示为10个代表测站运用3种随机模型构建方法2 d的PPP平均收敛时间统计。结果表明,方法2与方法3对PPP收敛性的影响基本一致,因为其构建原理相同,且BDS-3中GEO和IGSO卫星数较少,卫星分类评估定权对PPP收敛性能的影响有限;但相较于传统的方法1,2种方法都能不同程度地减少PPP收敛所需时间。
如表5所示为运用2种精度评估定权方法后BDS-3 PPP收敛时间的缩短量。从2 d的统计数据中可以看出,约52%的PPP实验结果收敛缩短时间在10~70 min不等,约15%的实验结果收敛时间可缩短30 min以上。运用2种精度评估定权方法后,静态PPP可迅速收敛至厘米级。
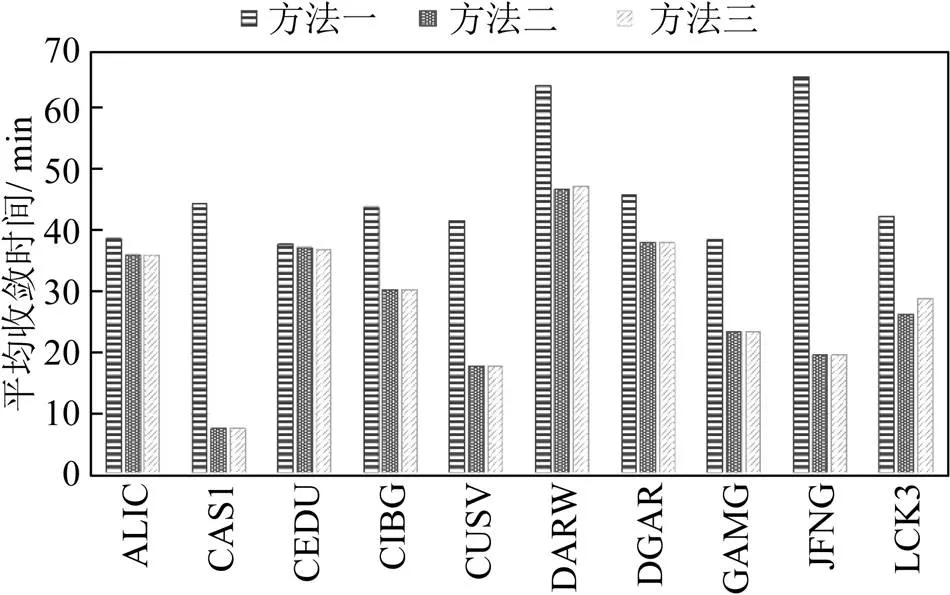
图8 代表测站3种方法平均收敛时间
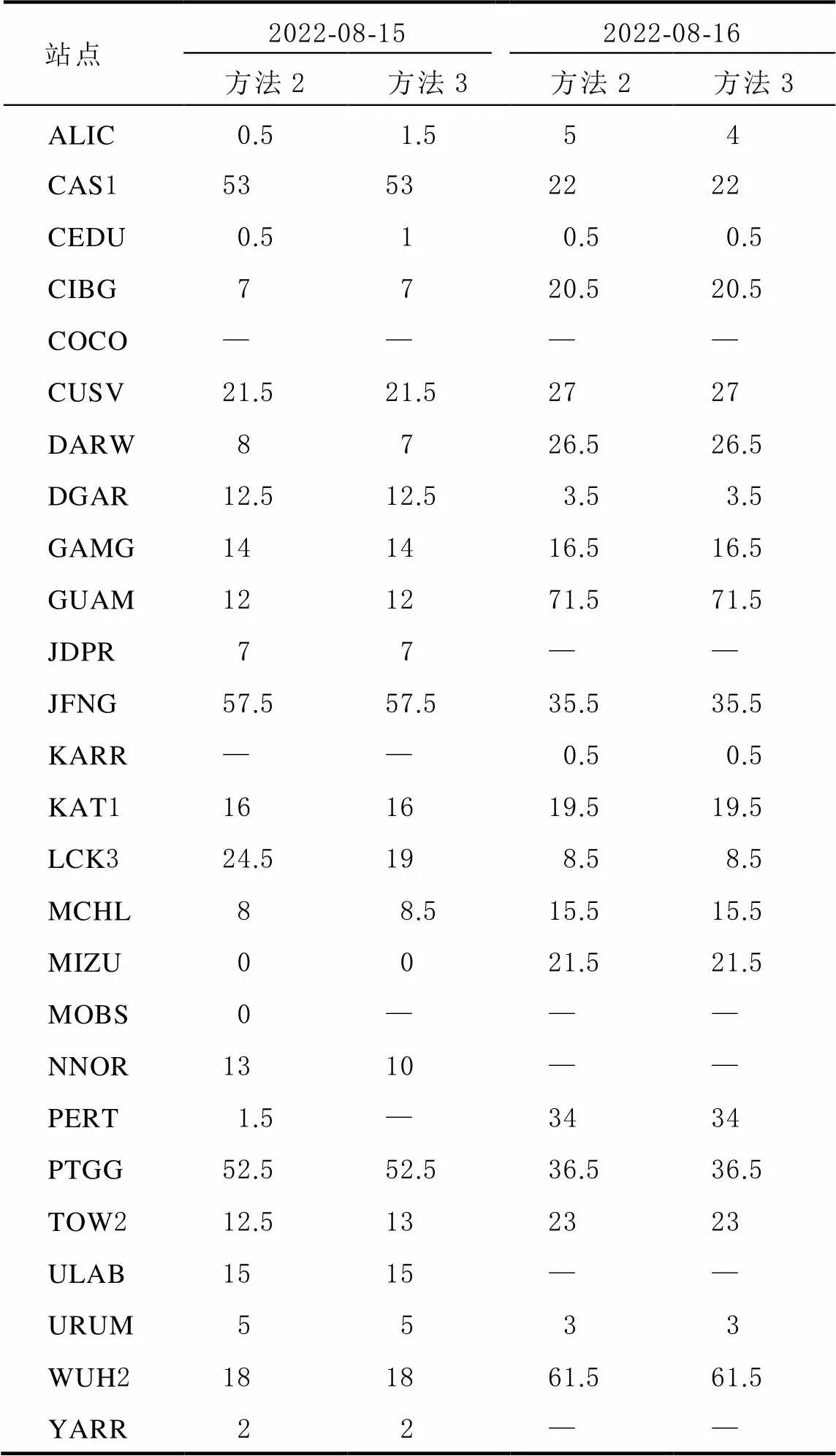
表5 BDS-3 2种精度评估定权方法相对方法1 PPP收敛时间缩短量 min
实验结果充分验证了其对传统PPP随机模型的改进方法是有效的。对于1/3和1/3的标准偏差比率的统一设置不利于快速PPP处理,应该在评估观测值精度的基础上确定合理的伪距相位比,使其在PPP定位过程中发挥充分的作用;同时,对于BDS的3类卫星进行分类评估构建随机模型则更为合理。
3 结束语
随着北斗三号全球卫星导航系统的发展,传统的伪距相位固定比随机模型不能充分发挥伪距观测值的作用,也忽略了BDS-3 GEO、IGSO和MEO卫星观测精度差异。本文利用相位伪距无电离层差值组合,提出了观测精度评估定权和卫星分类观测精度评估定权随机模型构建方法,并应用于BDS-3静态精密单点定位中。实验结果表明,2种方法构建的随机模型能够有效提高BDS-3静态PPP的定位精度和收敛时间,1 h平均定位精度在北和垂直2个方向上分别可提升0.8和6.8 cm,三维定位精度平均可提升4.6 cm;2 h平均定位精度在北和垂直2个方向上分别可提升0.7和5.0 cm,三维定位精度平均可提升3.4 cm;收敛时间平均可缩短8~10 min。但需要指出的是,2 d收敛时间的缩短量表明所提出的随机模型性能并不稳定,这可能是受到了所使用的产品性能的影响。基于单站的观测精度评估随机模型能顾及BDS不同类型卫星的精度特性,且考虑了BDS-3观测精度的时空差异,对BDS随机模型的完善具有积极意义。
[1] 宁津生, 姚宜斌, 张小红. 全球导航卫星系统发展综述[J]. 导航定位学报, 2013, 1(1): 3-8.
[2] MALYS S, JENSEN P A. Geodetic point positioning with GPS carrier beat phase data from the CASA UNO experiment[J]. Geophysical Research Letters, 1990, 17(5): 651-654.
[3] ZUMBERGE J F, HEFLIN M B, JEFFERSON D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of Geophysical Research: Solid Earth, 1997, 102(B3): 5005-5017.
[4] 张小红, 李星星, 李盼. GNSS精密单点定位技术及应用进展[J]. 测绘学报, 2017, 46(10): 1399-1407.
[5] Dovis F, Muhammad B, Cianca E, et al. A run-time method based on observable data for the quality assessment of GNSS positioning solutions[J]. IEEE Journal on Selected Areas in Communications, 2015, 33(11): 2357-2365.
[6] WANG J L, STEWART M P, TSAKIRI M. Stochastic modeling for static GPS baseline data processing[J]. Journal of Surveying Engineering-asce, 1998, 124: 171-181.
[7] LI H J, XU T H, LI B F, et al. A new differential code bias (C1–P1) estimation method and its performance evaluation[J]. GPS Solutions, 2016, 20(3): 321-329.
[8] 柴大帅, 王胜利, 卢秀山. 基于信噪比的GNSS随机模型分析[J].全球定位系统, 2016, 41(5): 42-46, 65.
[9] GAO Z Z, SHEN W, ZHANG H P, et al. Application of Helmert variance component based adaptive Kalman filter in multi-GNSS PPP/INS tightly coupled integration[J]. Remote Sensing, 2016, 8(7): 553.
[10] ZHANG Q Q, ZHAO L, ZHOU J H. A novel weighting approach for variance component estimation in GPS/BDS PPP[J]. IEEE Sensors Journal, 2019, 19: 3763-3771.
[11] ZHANG B C, HOU P Y, LIU T, et al. A single-receiver geometry-free approach to stochastic modeling of multi-frequency GNSS observables[J]. Journal of Geodesy, 2020, 94(4).
[12] HU H, XIE X F, GAO J X, et al. GPS-BDS-Galileo double-differenced stochastic model refinement based on least-squares variance component estimation[J]. Journal of Navigation, 2021, 74(6): 1381-1396.
[13] ZHANG Q Q, ZHAO L, ZHOU J H. A resilient adjustment method to weigh pseudorange observation in precise point positioning[J]. Satellite Navigation, 2022, 3(1): 1-15.
[14] LI H J, XIAO J X, LI B F. Evaluation and application of the GPS code observable in precise point positioning[J]. Journal of Navigation, 2019, 72(6): 1633-1648.
[15] 严丽, 李萌, 梅熙, 等. 实时估计不同类型北斗卫星观测值的随机模型[J]. 武汉大学学报(信息科学版), 2017, 42(2): 263-9.
[16] 李树文, 王潜心, 武威. BDS-3单双频信号全球定位精度分析[J]. 测绘科学, 2021, 46(12): 67-74.
Stochastic model construction for BDS-3 precise point positioning with observation evaluation
FENG Chang, XIAO Jingxin, LI Haojun
(College of Surveying and Geo-Informatics, Tongji University, Shanghai 200092, China)
Aiming at the limitation of traditional stochastic model in precise point positioning (PPP) data processing of BDS-3 global navigation satellite system (BDS-3), on the basis of evaluating the accuracy of the BDS-3 observations, the paper proposed a method for constructing the BDS-3 PPP stochastic model: the observation of BDS-3 single-station was used to evaluate its phase and pseudorange observation accuracy; then according to the evaluation results, the weight ratio of the observation in BDS-3 PPP was set, and the time and space differences of BDS-3 observation and the observation accuracy differences of various BDS-3 satellites were considered; finally, the experimental verification was carried out by using the observation data of 100 International GNSS (global navigation satellite system) Service (IGS) stations. Results showed that the convergence time of PPP using the proposed method would be shortened by 8-10 min on average, the average three-dimensional positioning accuracy in one hour would be improved by 4.6 cm, and the average three-dimensional positioning accuracy in two hours would be improved by 3.4 cm, which indicates that the proposed method could effectively enhance the performance of BDS-3 static precise point positioning.
BeiDou-3 navigation satellite system (BDS-3);precise point positioning (PPP); stochastic model; observation accuracy evaluation; pseudorange-phase ratio
冯畅, 肖晶鑫, 李浩军. BDS-3观测评估及其PPP随机模型构建[J]. 导航定位学报, 2023, 11(4): 70-77.(FENG Chang, XIAO Jingxin, LI Haojun. Stochastic model construction for BDS-3 precise point positioning with observation evaluation[J]. Journal of Navigation and Positioning, 2023, 11(4): 70-77.)DOI:10.16547/j.cnki.10-1096.20230410.
P228
A
2095-4999(2023)04-0070-08
2022-12-15
国家自然科学基金项目(41974025,42174019);中央高校基本科研业务费专项资金资助项目。
冯畅(1997—),男,安徽合肥人,硕士研究生,研究方向为BDS精密单点定位随机模型构建。
李浩军(1981—),男,甘肃平凉人,博士,教授,研究方向为GNSS卫星大地测量。
猜你喜欢
军事文摘(2023年4期)2023-04-05
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
测绘科学与工程(2017年3期)2017-08-16
雷达学报(2017年6期)2017-03-26
测绘通报(2016年12期)2017-01-06
导航定位学报(2015年2期)2015-06-05