
个体呼吸性粉尘质量浓度监测仪的设计研究
2023-08-29 06:51张强
矿山机械 2023年8期
张 强
中煤科工集团重庆研究院有限公司 重庆 400037
粉尘是作业场所的主要灾害之一,长期吸入粉尘可引发严重的尘肺病,给作业人员身体健康带来严重的影响。目前主要通过安装粉尘质量浓度传感器对作业场所进行定点监测,对作业人员呼入呼吸性粉尘的质量浓度主要通过个体采样方式实现,无法对作业人员直接吸入的呼吸性粉尘质量浓度进行实时监测[1-3]。因此笔者研究了针对作业人员个体呼吸性粉尘质量浓度实时监测技术,实现了作业人员接触呼吸性粉尘质量浓度的实时监测,为粉尘职业危害研究提供了有力的数据支撑。
1 工作原理
个体呼吸性粉尘质量浓度监测技术原理如图1 所示。含尘气流通过抽气泵的作用,经过呼吸性粉尘分离器分离后,再送入光学检测单元,采用 MIE 氏散射原理进行呼吸性粉尘质量浓度的检测。为了保证抽气流量的稳定,通过对抽气管路抽气流量的实时监测和抽气泵的控制来实现抽气流量的闭环控制。

图1 个体呼吸性粉尘质量浓度监测技术原理Fig.1 Principle of individual respirable dust mass concentration monitoring technology
2 质量浓度监测仪设计研究
2.1 呼吸尘连续分离器
呼吸尘连续分离器采用旋风分离原理,需要满足 BMRC 曲线的要求。首先初步设计分离器各结构尺寸,再依据响应曲面法给出需要进行流场模拟的计算工况,接着对推荐工况进行流场模拟,计算各工况分离效率,最后基于响应曲面法拟合分离效能公式,得出分离器的最佳尺寸。
依据平衡轨道模型,根据 BMRC 曲线分离标准,建立分离器三维模型,使用 Gambit 对分离管进行网格划分,如图2 所示。

图2 分离器网格划分Fig.2 Grid division of separator
选用相应软件对设计的呼吸性粉尘旋风分离器的内部流场进行数值模拟。为了有效地进行仿真,使用离散相模型,在动量方程中忽略粉尘颗粒间的互相碰撞带来的影响。呼吸性粉尘旋风分离器由于应用时采样流量较小,内部气体运动速度较小,因此采用雷诺应力模型对呼吸性粉尘旋风分离器气相流场进行数值模拟分析,同时分析结构参数变化对其分布的影响[4-5]。
在FLUENT 中对不同结构旋风分离器的捕集效率进行了模拟仿真,如图3 所示,根据响应曲面法确定旋风分离器的有效尺寸。
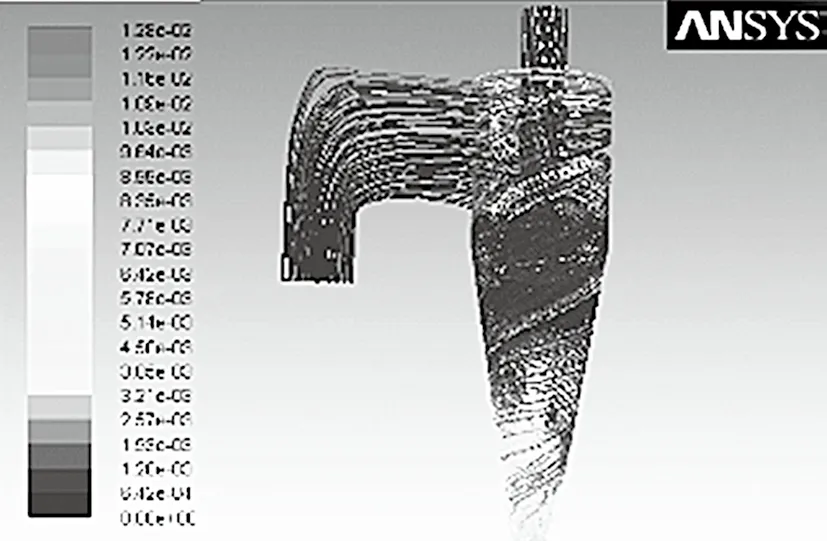
图3 分离器内部颗粒轨迹分布Fig.3 Particle trajectory distribution inside separator
2.2 呼吸尘检测单元
对呼吸性粉尘质量浓度的检测主要根据 MIE 散射原理,通过研究光学检测的光路结构、布局,配合入射光源和光电检测器地选择,获得最灵敏的粉尘散射光强与粉尘质量浓度响应曲线。
呼吸性粉尘光学检测单元如图4 所示,主要包括激光光源、光学透镜组、凹面聚光镜、光电传感器和光陷阱,整个单元封装在一个遮光的腔体内。激光光源可以发射固定波长的单色激光,光学透镜组使得激光聚集成平行的激光束,凹面聚光镜用于收集激光经过被测粉尘后的散射光,光电传感器用于检测激光经过被测粉尘后的散射光强,光陷阱用于吸收通过被测粉尘的入射光[6-7]。

图4 光学检测单元Fig.4 Optical detection unit
为了防止光学检测单元被粉尘污染,在光学检测单元采用抗污染设计:①检测单元内部采用涂层方式,防尘粉尘粘连;② 检测单元的进气口采用锥形结构,减小粉尘在检测单元内部的扩散量;③在凹面聚光镜表面镀金,防止粉尘粘连;④ 检测单元内部设计反吹结构,将扩散至检测单元内部的粉尘从出气口排出。
2.3 抽气流量控制系统
采用旋风分离器对呼吸性粉尘进行分离。由于旋风分离器要求抽气流量在 2 L/Min,因此笔者采用孔板流量计进行抽气流量的监测,再采用经典的 PID 控制技术实现抽气流量的恒定控制[8]。抽气流量恒定控制结构如图5 所示。当监测的流量低于设定值时,系统自动调高抽气泵的转速,从而增大整个气路的抽气流量;当监测的流量高于设定值时,系统自动降低抽气泵的转速,从而减小整个气路的抽气流量。在系统设计时,设置超限值回差机制,从而避免流量在设定值附近反复动作。通过以上 PID 控制技术地自动调节,使得流量始终稳定在设定值附近,从而保证抽气流量的恒定。

图5 抽气流量恒定控制结构Fig.5 Pumping flow constant control structure
2.4 硬件设计
个体呼吸性粉尘质量浓度监测仪的硬件结构如图6 所示。

图6 监测仪硬件结构Fig.6 Hardware structure of monitor
(1) 激光器驱动电路 选用 670 nm 的红外激光二极管作为光学发生器件,通过激光驱动电路驱动激光二极管产生激光。
(2) 光学检测电路 由于呼吸性粉尘粒径小,质量浓度低,受光照射时,散射光强度极弱,通过精密光学检测单元的收集后,照射到光电转换器件上产生的电流为 nA 级,在检测时很容易被噪声信号干扰。为了能准确地检测出这些信号,要求放大电路具有高增益、低噪声、低温漂、高输入阻抗、低偏置电流的特点,且还应具有足够的信号带宽和负载能力,以及良好的线性和抗干扰能力。
(3) 流量检测电路 采用安费诺的 NPA 系列差压传感器检测气路的压力差,从而进行流量的检测。
(4) 数据通信电路 采用 CH341T 型 USB 转串口专用芯片设计数据通信电路,利用 ARM 芯片的串口通信功能发送数据至 USB 接口,最终实现监测仪存储数据的上传。
(5) MCU 监测仪中使用工业级的 STM32L 系列核心控制芯片。STM32L 系列是具有超低功耗的 M3 芯片,且各个外部设备都应有自己的独立时钟开关,可以通过关闭相应的时钟来降低功耗,满足个体监测仪器的应用[9]。
2.5 软件设计
监测仪的软件设计如图7 所示。首先仪器开机之后,整个系统初始化,各种参数自动配置,然后分析触摸事件。紧接着可进行 3 个方面的动作:①进行参数设置,并将获得设置的参数存入仪器中;② 启动仪器进行测试,并将测试结果输出显示;③可进行数据记录查询,使其能进行数据通信。

图7 监测仪的软件设计Fig.7 Software design of monitor
3 精度验证
为了验证个体呼吸性粉尘质量浓度监测仪器的测量精度,在实验室粉尘风硐中,用呼吸性粉尘采样器和个体监测仪平行采样进行精度验证试验。呼吸性粉尘采样器的采样流量为 2 L/min,相对误差为±2.5%,采样流量稳定性为±3%,采样准确率为±5%。个体监测仪采样流量为 2 L/min,相对误差为±2.5%,采样流量稳定性为±3%,测量误差为±10%。监测仪测量精度试验数据如表1 所列。与采样器检测数据相比,监测仪最大的检测误差为 9.77%。
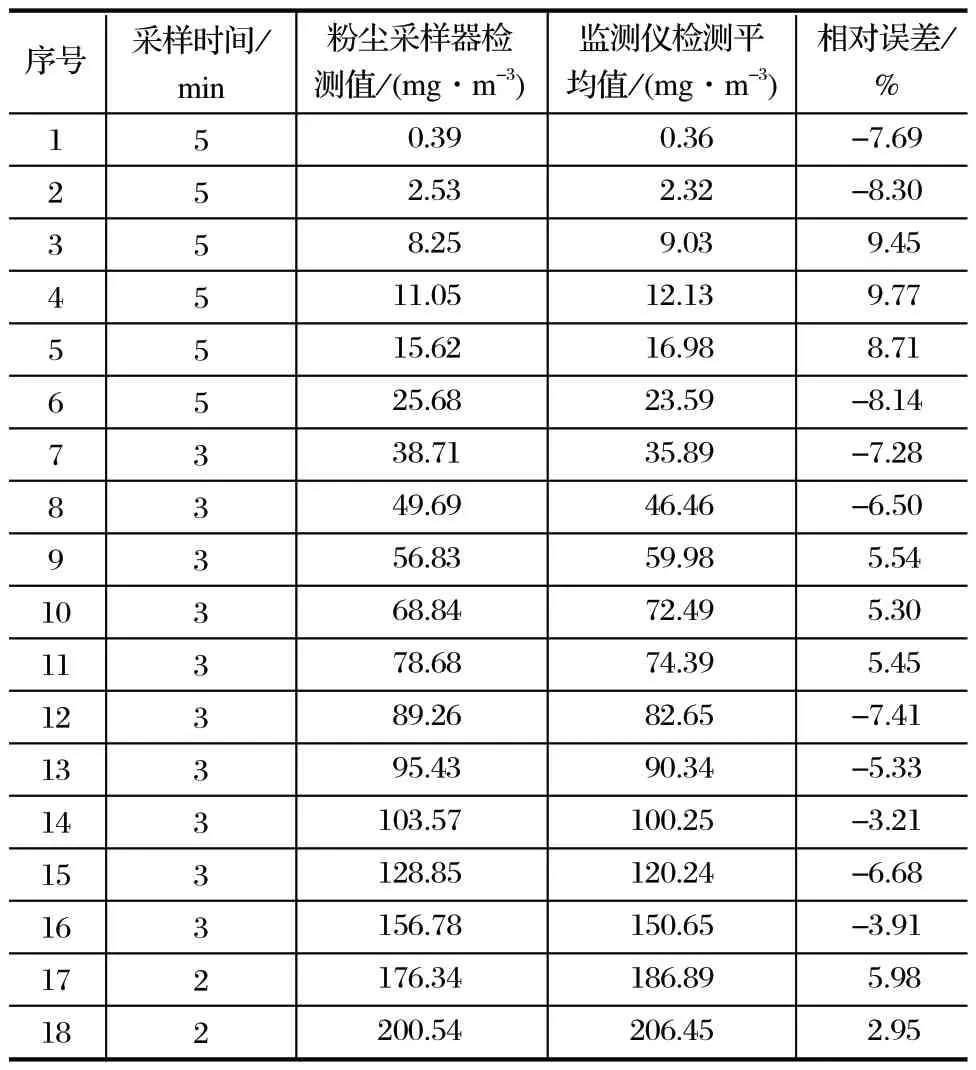
表1 监测仪测量精度试验数据Tab.1 Test data of measurement accuracy of monitor
4 结语
采用 MIE 散射原理设计了个体呼吸性粉尘质量浓度监测仪,通过阐述呼吸性粉尘分离器的仿真过程以及光学检测单元和流量控制系统的设计原理,重点介绍了监测仪的硬件组成部分和软件框架。通过对比试验,验证了个体呼吸性粉尘质量浓度监测仪可以检测 0~200 mg/m3的呼吸性粉尘,分辨率达到 0.01 mg/m3,最大检测误差为 9.77%。
猜你喜欢
科技视界(2021年4期)2021-04-13
福建质量管理(2020年16期)2020-09-09
中国特种设备安全(2019年7期)2019-09-10
电子制作(2018年9期)2018-08-04
电子制作(2018年12期)2018-08-01
电子制作(2016年23期)2016-05-17
安全(2015年1期)2016-01-19
苏州市职业大学学报(2015年2期)2015-12-25
中国科技纵横(2014年12期)2014-12-10
河南医学研究(2014年4期)2014-02-27
