
基于改进自适应卡尔曼滤波的闭环脱靶量预测技术研究
2023-08-29 04:12冀云彪张鹏飞赵永娟王智伟郭伟峰
火炮发射与控制学报 2023年4期
冀云彪,张鹏飞,赵永娟,王智伟,郭伟峰
(1.中北大学 机电工程学院,山西 太原 030051;2.中北大学 智能武器研究院,山西 太原 030051)
脱靶量指遭遇过程中射弹与目标的最小矢量距离,是自行高炮武器系统的重要性能指标。一方面可以鉴定和评估自行高炮武器系统的作战能力,另一方面是闭环校射环节中重要的测量值。闭环校射是利用脱靶量测量值预先估计出脱靶量未来值实现对射击过程的反馈控制,从而提高其射击精度。闭环校射作为改善自行高炮武器系统射击精度的重要手段,自被提出以来一直是自行高炮武器系统领域研究的热点问题[1-2]。
在闭环校射流程中,首先,车载检测装置获得目标位置信息;其次,通过火控计算机估算其运动参数,建立目标运动模型,求解未来命中点,进而确定对应的射击诸元;最后,根据测量的脱靶量信息,结合脱靶量数学模型,利用某种预测方法获得预测修正量,进行射击诸元校正。重复此循环,实现闭环校射。由此可见脱靶量预测是闭环校射的核心,是提高闭环校射精度的重要一环。
传统卡尔曼滤波已应用在高炮系统闭环校射中脱靶量的预测并且具有较好的预测精度[3]。该方法是当线性系统状态方程中过程噪声和测量噪声的统计特性精确的情况下,通过系统输入输出观测数据,对系统状态进行最优估计的算法[4]。但实际过程中,观测数据中过程噪声和干扰的影响无法精确表示,导致传统卡尔曼的预测精度不高。目前国内外学者提出一系列基于传统卡尔曼滤波的改进算法来解决这些问题。
周晶等提出一种对Sage-Husa自适应卡尔曼滤波算法的改进方法,通过收敛判据来选择滤波方法,保证信息融合的精度和稳定性[5]。鲁平等提出了一种Sage-Husa自适应滤波算法,该算法通过协方差匹配技术实现在线估计噪声统计特性[6]。杨丽君等提出建立基于自适应新息卡尔曼滤波算法的弹丸脱靶量预测模型,利用新息序列计算获得系统噪声矩阵和量测噪声协方差矩阵构建新息卡尔曼预测模型[7]。以上文献研究结果表明,自适应卡尔曼滤波算法关键在于进行滤波的同时,利用观测数据进行实时的估计和修正过程噪声参数、测量噪声统计特性提高滤波精度,其可以应用在离散脱靶量数据的预测中。因此,笔者设计了一种改进滤波算法对脱靶量进行预测,在简化的自适应滤波算法基础上,引入渐消因子和滤波收敛性判据,通过优化噪声统计特性提高滤波收敛性和稳定性,从而提高其预测精度。解决了传统卡尔曼滤波算法非线性时精度不高的问题,为脱靶量的预测提供一种新的思路。
1 脱靶量数学模型
1.1 脱靶量误差分解
自行高炮武器系统的脱靶量是由多个误差源耦合而成的,如射表处理误差、未来命中点解算误差、气象条件误差、弹丸散布误差、目标运动假定误差等误差。为了更好地预测并校正误差,需要根据射击误差的统计特性将脱靶量误差进行分解。将脱靶量误差具体分为系统误差和随机误差两大类,其中随机误差按时间的相关性分为强相关误差、弱相关误差和不相关误差[8]。
笔者采用二维脱靶量进行预测修正,二维脱靶量以方位角脱靶量和高低角脱靶量作为表征。具体的脱靶量在方位角和高低角两个方向上的分量相互独立,针对任意方向上脱靶量的序列,其数学模型为
x(k)={ax+xq(k)+xr(k)+xb(k)},k=1,2,…
(1)

1)ax表示系统误差,表达式为
(2)
此误差即射击误差的均值,可以为常数,也可以是函数。对射击误差而言,它是射击开始前的已知量,因而其方差、相关系数皆为零。构成系统误差的误差源是射表处理误差和未来命中点解算误差。
2)xq(k)表示强相关误差,表达式为
(3)
此误差对两个不同时刻是线性相关,其特征是相关系数为1。构成强相关误差的误差源有气象条件误差等误差。
3)xr(k)表示弱相关误差,表达式为
(4)

(5)
4)xb(k)表示不相关误差,表达式为
(6)
此误差随时间无相关关系,其特征是相关系数为0。构成不相关误差的误差源有弹丸散布误差等误差。
1.2 脱靶量数学模型建立
在闭环校射中,不相关误差是不可预测和校正的,而强相关误差和弱相关误差,掌握其统计特性和特征参数,可以对其预测并校正[8]。因此,依据不相关、弱相关和强相关3种特性建立可预测的脱靶量数学模型[9-10]:
(7)
式中:k表示脱靶量测量时刻;v(k)表示脱靶量的测量误差,var(v(k))=R2,表示测量装置精度方差;ω(k)表示脱靶量模型误差;var(ω(k))=R1,表示状态过程方差,即脱靶量序列方差;x(k)表示脱靶量测量值;φ表示状态转移系数;Γ表示模型误差系数。
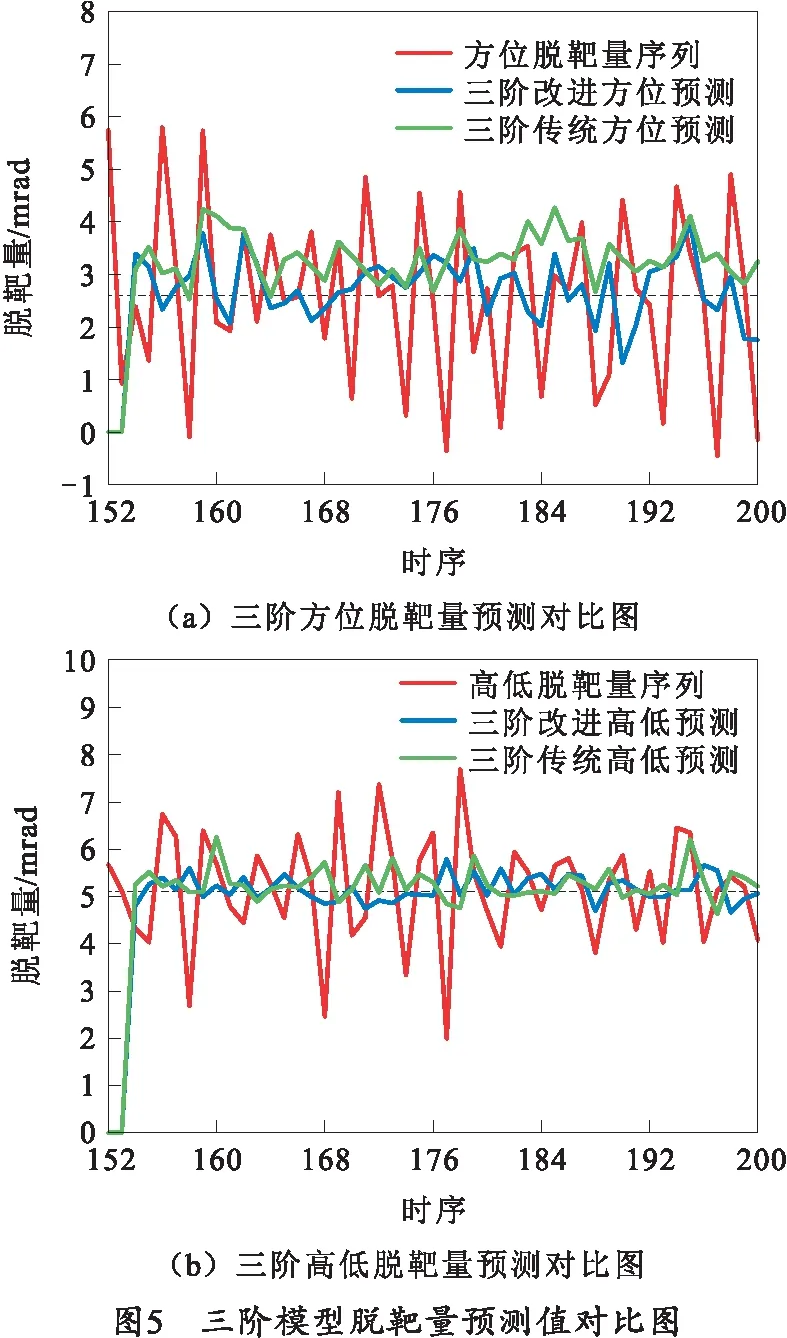
随着现代高炮武器系统射频的提高,射击过程中前一发弹药的脱靶量对其后各发都有影响,因而每次发射弹药对脱靶量的影响都是有差别的。为了提高预测的准确性,采用三阶模型即利用脱靶量序列中前3次的脱靶量测量值预测第4发,因此基于时间序列的相关关系,分别构建φ和Γ随着阶数N变化的脱靶量数学模型,是不同阶数时脱靶量预测的前提。
对时间序列建模,其中相关系数r1,r2,r3计算方法如下:假设构成时间序列的每一个值xt,xt-1,…,xt-k之间存在一定的相关关系,用自相关系数rk度量,测量值xt与xt-k之间存在xt-1,xt-2,…,xt-k+1,这k-1个中间变量会影响到两者之间的相关性,xt与xt-k之间的自相关系数表示为
(8)

基于时间序列所获得的相关系数建立脱靶量阶数与φ、Γ的脱靶量数学模型如下:
1)N=1时,脱靶量的一阶预测模型,表示k时刻脱靶量只与前一个时刻相关:
(9)
2)N=2时,脱靶量的二阶预测模型,表示k时刻脱靶量只与前两个时刻相关:
(10)
3)N=3时,脱靶量的三阶预测模型,表示k时刻脱靶量只与前3个时刻相关:
(11)
2 脱靶量预测算法
2.1 传统卡尔曼滤波预测算法
传统卡尔曼滤波可分为连续型和离散型两种,基于脱靶量数学模型构建的系统方程和量测方程都是离散型,因此脱靶量的预测采用离散型卡尔曼滤波。离散卡尔曼滤波基本原理可参考文献[10-11],本文不作详细描述。
设目标状态方程和传感器测量方程如下:
(12)
式中:Xk为被估计量;φ(k/k-1)为状态转移矩阵,Γk为系统噪声矩阵;ωk-1为k时刻系统噪声矩阵;Vk为k时刻测量噪声;Hk为观测矩阵;Zk为k时刻量测向量。
离散卡尔曼滤波算法工作原理如图1所示。从离散卡尔曼滤波算法工作原理中的增益计算回路可看出:增益计算回路是一个独立的计算回路,其值的迭代与计算更新完全得益于预测误差Q与观测误差R,因此这两个参数的选取和精确测量将直接影响到卡尔曼滤波器的效果。但在实际工程应用中Q和R很难确定,需要采用默认值或经验值。当Q和R精度不高时,会导致预测精度的降低。

2.2 基于改进自适应卡尔曼滤波预测算法
笔者在传统卡尔曼滤波算法的基础上,提出一种改进自适应卡尔曼滤波算法[12-16],通过次优渐消因子λ(k)和在滤波过程中由滤波收敛性判断当前滤波是否收敛,若满足条件说明当前滤波收敛,不需要更新;若不满足则说明此时系统模型已不适应当前状态,需实时调整Q和R对系统状态和状态协方差进行更新,对历史数据进行渐消,降低旧数据对当前滤波值的影响程度,提高对脱靶量预测的精度,具体算法流程如下:
1)离散状态预测:
X(k+1/k)=φ(K)X(k/k),
(13)
式中:X(k/k)为k时刻的状态估计值;X(k+1/k)为k+1时刻的状态预测值。
2)协方差预测:
(14)
离散卡尔曼滤波由量测信息与预测信息更新状态信息,基于最小方差原则实现状态更新。R1表示状态过程方差,即脱靶量序列方差。
3)计算滤波增益矩阵:

(15)
K(k+1)为k+1时刻基于最小方差原则获得的增益矩阵,其中R=R2。
4)残差计算。残差为观测值与状态估计值的差:
εk=Zk-H(k)X(k+1/k).
(16)
5)计算k+1时刻状态估计:
X(k+1/k+1)=X(k+1/k)+K(k+1)εk,
(17)
式中,X(k+1/k+1)为k+1时刻更新后的状态值。
6)计算k+1时刻估计误差方差:
P(k+1/k+1)=[I-K(k+1)H(k)]P(k+1/k),
(18)
式中:P(k+1/k)为k+1时刻更新后的状态协方差;I为单位矩阵。由式(17)、(18)对系统状态值和状态协方差进行更新,为下一次循环使用。
7)加入收敛性判据:
(19)
在滤波过程中,由滤波收敛性判断当前滤波是否收敛,若满足条件说明当前滤波收敛,不需要更新;若不满足则说明此时系统模型已不适应当前状态,需要更新Q和R。
8)加入渐消因子λk。渐消因子是经验值,是根据实际运用在0.80~0.85之间取的任意一个数,并用改进后的自适应卡尔曼滤波对Q和R进行更新:
(20)
式中,bk为加权系数。
利用上述两个更新方程,调整Q和R达到实时对系统状态和状态协方差进行更新的目的,降低旧数据对当前滤波值的影响程度。
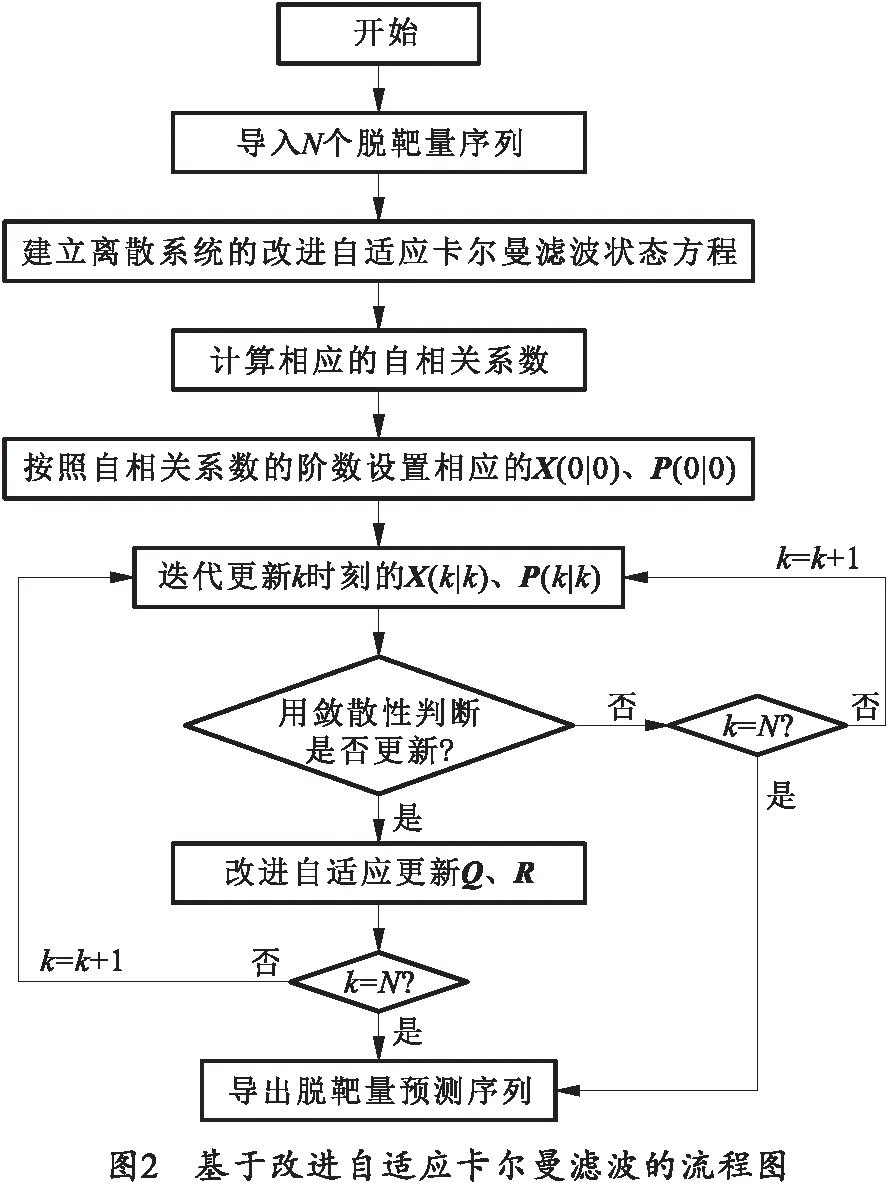
通过以上改进自适应卡尔曼滤波公式的迭代计算,在一定程度上可解决噪声统计问题,提高脱靶量预测精度。笔者设计的基于改进自适应卡尔曼滤波的流程图如图2所示。可知,导入脱靶量序列后,基于脱靶量数学模型建立改进自适应卡尔曼滤波状态方程,并进行赋值,经过迭代更新获得脱靶量的预测序列。其中,改进自适应卡尔曼滤波流程中重点在于通过改进自适应更新Q、R的循环迭代解决噪声统计问题。
3 仿真分析
3.1 仿真条件
首先通过自拟软件对目标以7 m/s速度水平运动,载体以11 m/s速度水平运动时的脱靶量测量序列进行仿真,然后将仿真得到的脱靶量测量序列分别带入传统卡尔曼滤波算法和改进自适应卡尔曼滤波算法进行仿真预测和闭环校正。其中预测递推步数取1,一阶预测模型以前151发为初始数据,对152~200发数据进行预测修正;二阶预测模型以前152发为初始数据,对153~200发数据进行预测修正;三阶预测模型以前153发为初始数据,对154~200发数据进行预测修正。
3.2 仿真结果
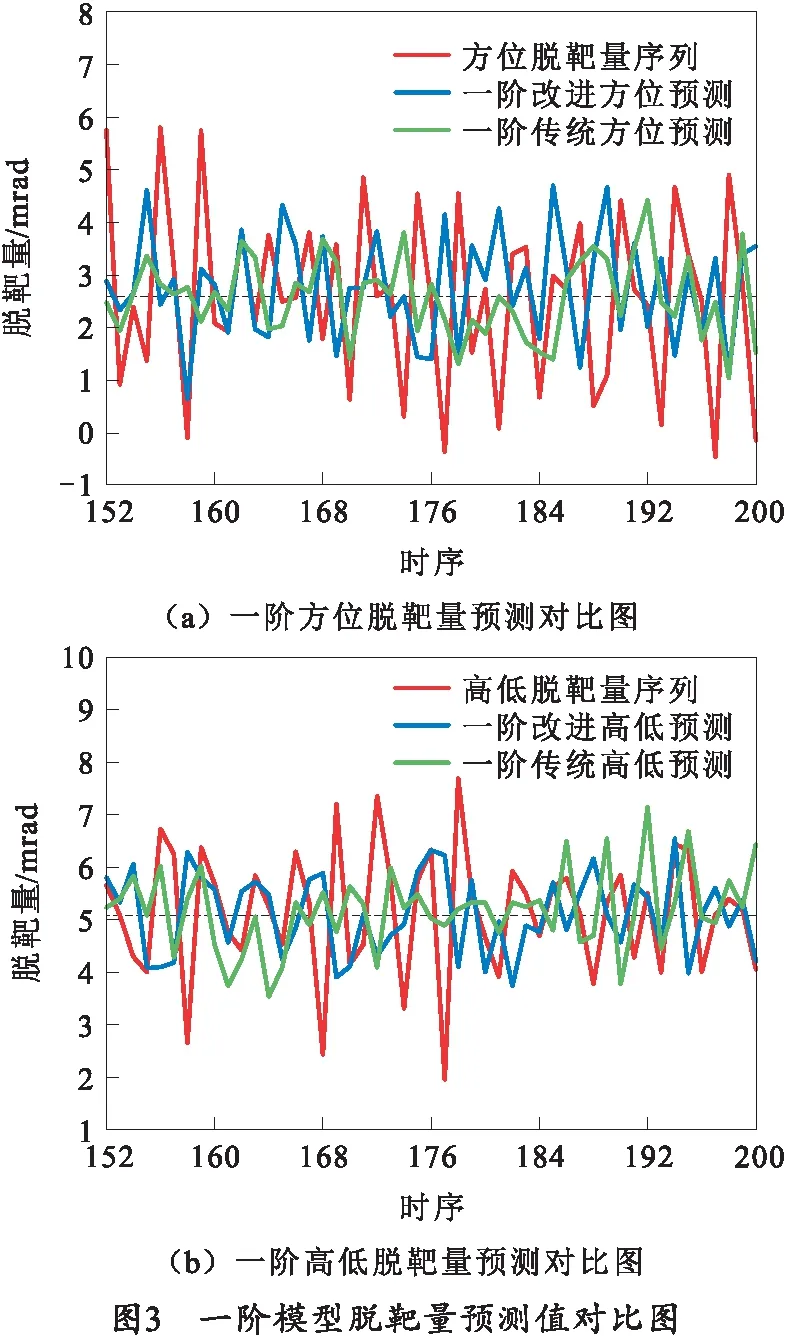
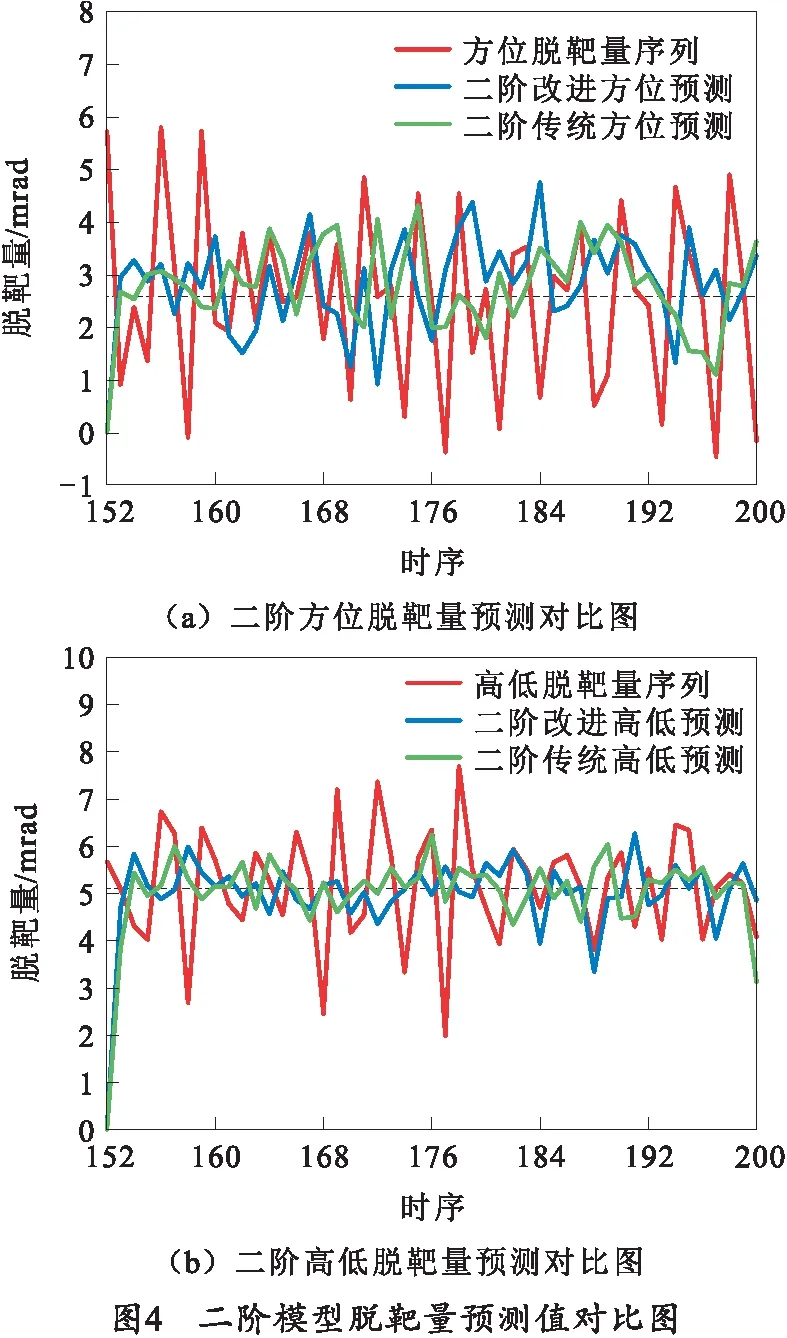
在第3.1节仿真条件的基础上得到方位角均值为2.610 0 mrad、高低角均值为5.163 4 mrad的未校正脱靶量序列,两种预测方法分别基于脱靶量数学模型中一阶模型、二阶模型、三阶模型的预测结果如图3~5所示。通过比较k+1时刻两种方法对k时刻脱靶量序列预测获得的预测值,可以直观地看出,随着阶数升高改进,自适应卡尔曼滤波比传统卡尔曼滤波的预测趋势能更好地稳定在脱靶量序列的均值处,能达到更好的预测。
为了获得一阶到三阶脱靶量预测模型的闭环脱靶量精度,将脱靶量预测值修正到射击诸元中完成闭环校射,并且对比分析闭环修正后的脱靶量数据能更直观看出两种方法的预测效果。一阶到三阶修正图如图6~8所示。
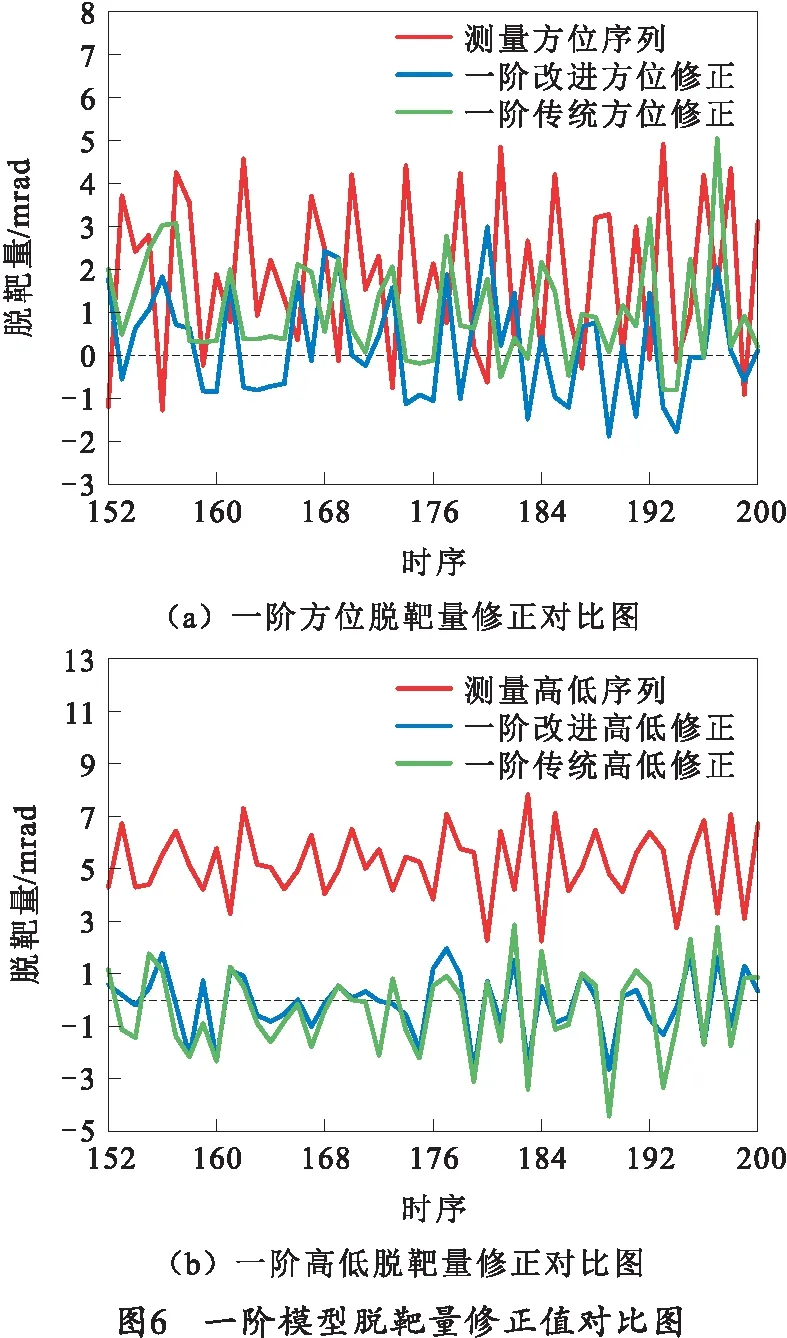
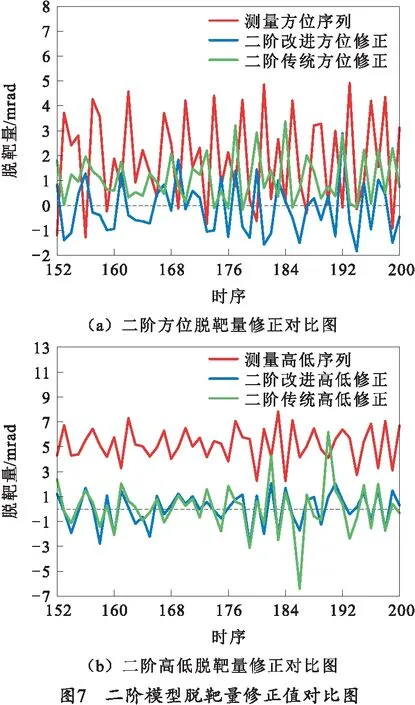

由图6~8可以直观地看出,将改进自适应卡尔曼和传统卡尔曼滤波方法获得的预测值修正到射击诸元中,完成闭环校射后,改进自适应卡尔曼比传统卡尔曼滤波方法修正精度更高,证明改进自适应卡尔曼能更好地提高闭环修正精度。
脱靶量序列在不同阶数下,脱靶量修正递推模型的统计特性,如表1所示。
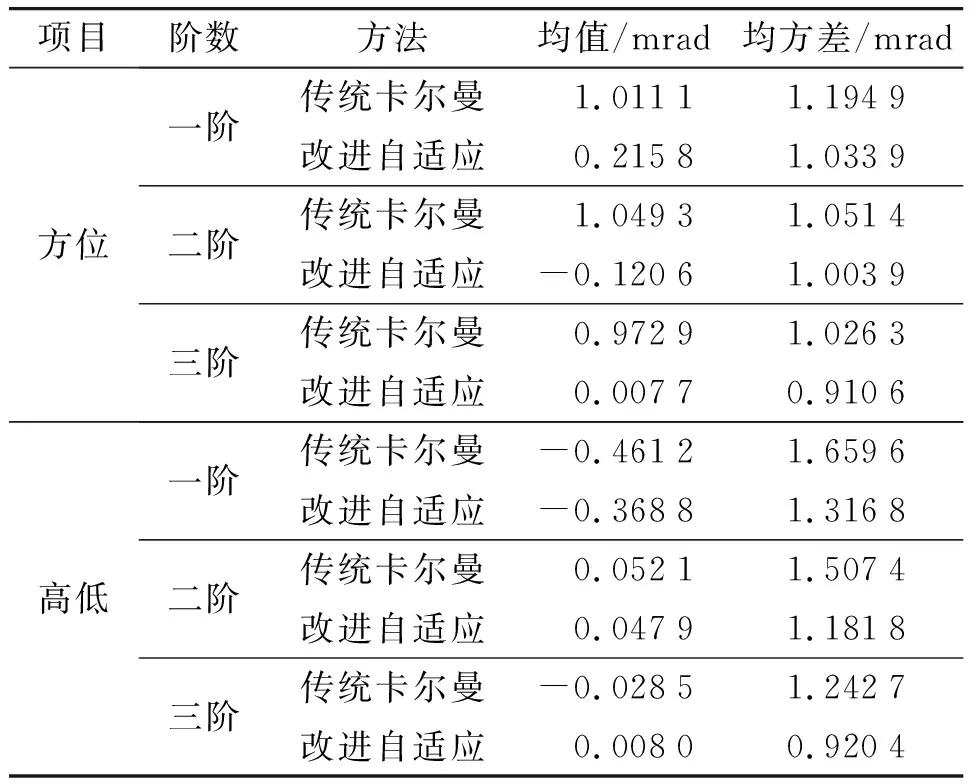
表1 脱靶量修正模型精度统计表
从上述的仿真结果对比图以及定量统计分析中,可以总结出以下结论:
1)在预测过程中,相比传统卡尔曼滤波所预测的脱靶量结果,基于改进自适应的卡尔曼滤波所预测的脱靶量结果更接近脱靶量数据且稳定在脱靶量数据的均值处,这是由于改进卡尔曼滤波对噪声矩阵和量测矩阵的更新可以自适应修正,使预测结果更加准确。
2)基于传统卡尔曼滤波模型得到的一阶方位角脱靶量预测修正均值为1.011 1 mrad,比未校正脱靶量序列的均值精度提高81%以上(二阶、三阶修正效果均比一阶较好,下同);一阶高低角脱靶量预测修正均值为-0.461 2 mrad,比未校正脱靶量序列的均值精度提高76%以上。而改进自适应卡尔曼滤波模型得到的一阶方位角脱靶量预测修正均值为0.215 8 mrad,比未校正脱靶量序列的均值精度提高96%以上;一阶高低角脱靶量预测修正均值为-0.368 8 mrad,比未校正脱靶量序列的均值精度提高81%以上。改进自适应卡尔曼滤波一阶模型比传统卡尔曼滤波一阶模型的均值精度,在方位角预测修正后提高70%以上,在高低角预测修正后提高30%以上。
3)随着脱靶量预测模型阶数的增大,预测修正误差均值减小且精度提高较大,均方差的变化不大且趋于平稳。由此可见, 时刻脱靶量与前3个时刻的相关性较前一个和前两个时刻相关性有所增加。
4 结束语
为了提高火控计算机闭环校射弹丸脱靶量预测的精度,结合基于改进自适应卡尔曼滤波的算法,建立脱靶量的预测模型。该模型在进行滤波计算的同时,利用噪声统计特性进行实时估计和修正,具有应对噪声变化的自适应能力。仿真结果表明笔者所建立的3种脱靶量模型即一阶、二阶和三阶模型,其中随着模型的阶数增大,脱靶量数学模型的相关性随之增强,其预测精度也有所提高。基于改进自适应卡尔曼滤波的预测精度和稳定性相较于传统卡尔曼滤波方法显著提高,适用于对闭环校射弹丸脱靶量的预测修正。
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
法律方法(2019年4期)2019-11-16
北京航空航天大学学报(2017年9期)2017-12-18
摄影之友(影像视觉)(2017年1期)2017-07-18
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
系统工程学报(2015年2期)2015-02-28
