
基于视觉偏好的ASD儿童陪伴机器人造型设计研究
2023-09-01 07:55韦懿洋张丙辰杨俞玲
设计 2023年15期
关键词:造型设计
韦懿洋 张丙辰 杨俞玲
摘要:从ASD儿童视觉偏好角度出发,为陪伴机器人的造型设计提供设计参考。首先整理目前市场上使用率较高的陪伴机器人,并筛选具有代表性的造型并制作实验样本。然后运用眼动追踪法分析儿童对兴趣区的眼动数据。最后得到儿童对陪伴机器人造型的偏好。基于视觉偏好的陪伴机器人造型设计,可以提升视觉吸引力,获得良好心理体验,增强干预兴趣,为后续相关设计提供参考和依据。
关键词:ASD儿童 视觉偏好 眼动追踪法 陪伴机器人 造型设计
中图分类号:TB47 文献标识码:A
文章编号:1003-0069(2023)15-0107-05
Abstract:From the perspective of ASD childrens visual preferences,for the reference design with the modeling of robot design. Firstly,the company robots with high utilization rate in the market are sorted out,and representative models are selected and experimental samples are made. Then,eye movement tracking method was used to analyze the childrens eye movement data for the area of interest. Finally,the childrens preference for the shape of accompanying robot was obtained. Based on visual preference of robot design,can improve visual appeal,and obtain good psychological experience,enhance the interest intervention,provide reference and basis for the follow-up related design.
Keywords:ASD children Visual preference Eye tracking Companion robot Modeling design
引言
自閉症谱系障碍(Autism Spectrum Disorders,ASD)儿童最典型的特征是社交能力障碍、语言沟通能力障碍和兴趣范围狭窄及行为重复刻板[1]。2022年发布的《中国自闭症教育康复行业发展状况报告IV》指出,中国自闭症发病率达1%,且男孩是女孩的4-5倍[2]。研究表明,3-6岁是ASD儿童的最佳干预时期,科学系统、全面有效的干预训练对其生活自理能力、社会交往能力可以实现有效改善[3]。
一、研究背景
李闯[4]等研究ASD儿童在视觉方面具有独特优势,基于视觉提示的图形符号能够提升其认知能力。Joseph[5]等通过图像刺激ASD儿童时发现,针对视觉行为的干预有利于提高其任务完成度。杨丽民[6]研究指出,图片交换沟通系统能够有效提升ASD儿童的口语表达能力,并促进社会互动能力的发展。
Chevalier[7]等使用机器人Nao研究ASD儿童的感官偏好对模仿能力的影响时发现,视觉感知能力突出的儿童干预后表现出积极的社交行为。Amat[8]等研究认为,陪伴机器人通过实时跟踪与辅助反馈机制,对ASD儿童的联合注意能力与情绪识别能力产生积极影响。范晓壮[9]指出机器人可以帮助ASD儿童提升模仿、共同注意、轮流、情绪识别、主动交往能力。
卜凡帅[10]等根据眼动和瞳孔测量的联合数据指出,学龄前ASD儿童视觉优势在于其在搜索目标前后均保持较高的注意水平。刘春丽等[11]运用眼动实验收集学龄前儿童观看机器人时的眼动数据,发现其对外形可爱、具有普遍印象的动物形象机器人认知度最高。王广帅[12]等通过眼动追踪技术发现动态表情有利于ASD儿童提升情绪面孔识别能力。
通过以上研究可知,ASD儿童视觉感知能力较强,与机器人的互动更易激发训练积极性、改善刻板行为。因此,结合眼动追踪法,将ASD儿童的视觉偏好与机器人造型相结合,解析陪伴机器人造型设计的要点,提高干预训练的有效性。
二、实验设计
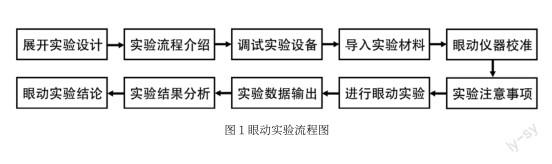
为了更清晰地开展ASD儿童陪伴机器人造型设计,对其视觉偏好进行解析。通过对ASD组被试与TD(普通儿童)组被试的眼动实验,能够得到ASD儿童对陪伴机器人造型的视觉偏好。具体的眼动实验流程(见图1),统计被试的眼动数据变化,并利用量化数据进行视觉偏好分析,为后续造型设计提供了参考[13]。
(一)实验被试
在徐州市康复机构选取年龄为3-6岁的15名(8男7女)ASD儿童作为实验组。在徐州铜山实验幼儿园选取15名TD儿童作为对照组,该过程按照年龄、性别与实验组进行匹配。向家长发放《家长知情同意书》,告知本次实验的目的和流程。
(二)实验材料
调研发现目前自闭症康复机构为ASD儿童提供的陪伴机器人为市面上普通类型机器人。通过对儿童玩具店、康复中心等地调研,以及结合国内外著名的玩具网站及商城的销量统计,共收集104种较为典型的陪伴机器人造型(见图2)。
从相似性、清晰度等方面对样本图片进行整理,去除风格相似及销量偏低后,初步得到40张造型特征具有明显差异的机器人图片。通过形态相似性原则对初步选取的样本图片进行分类,可以分为基本几何形、不规则形、仿生形三类。
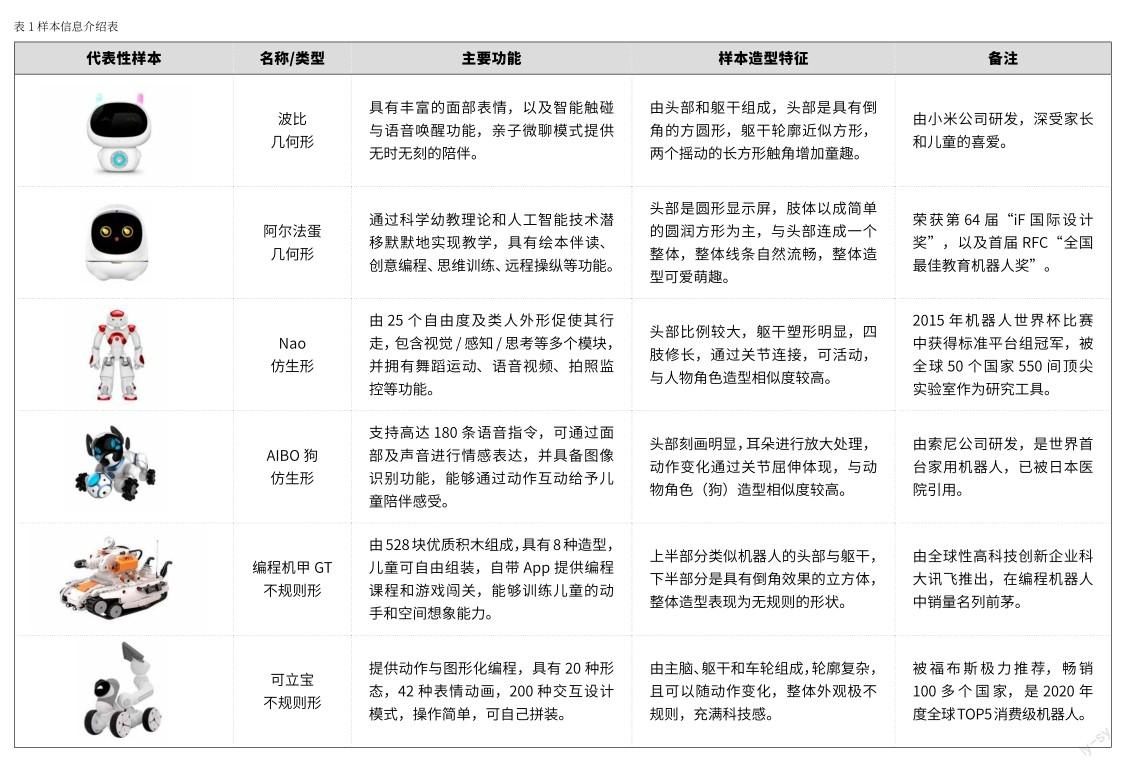
邀请2位具备资深儿童产品设计经验的设计师和4位产品造型设计专业的研究生再次筛选出6种作为机器人造型代表性样本,其主要内容信息见表1。

为了避免色彩、材质和品牌对偏好的影响,对陪伴机器人样本进行灰度模式处理,并调节亮度制作直方图,使各样本亮度层次大体一致,能够较为清晰地显示出造型细节(见图3)。
将阿尔法蛋、波比、编程机甲GT、可立宝、Nao、AIBO狗在后续实验中分别以Y1\Y2\Y3\Y4\Y5\Y6作为样本代号。為保证实验结果的准确性,将实验样本以拉丁方设计形式排列, 并且划出兴趣 区域(Areas of Interest,AOI),兴趣区域编号与样本编号一致(见图4)。
(三)实验设备及程序
采用aSee Glasses眼镜式眼动仪、微软12.3 英寸 Surface Pro 7一台,分辨率为2650×1600px,以及附带的aSee Glasses Studio软件记录所有参与实验的被试儿童自由观看样本时的注视行为,注视持续时间大于100ms为一次注视[14]。实验过程中,眼动仪与电脑相连,用于数据的采集(见图5)。
实验采取个别测试的方法,在独立房间内进行。实验前,被试在距离显示屏前约60cm的位置坐下,每名被试都要进行3点校准以确保实验的准确性;实验时,增加被试家长或机构教师进行辅助以处理可能出现的行为问题;实验后给予被试绘本、糖果奖励。
(四)数据处理
通过aSee Glasses眼镜式眼动仪配套的Studio1.1.17.8分析软件将眼动数据导出,利用SPSS 22.0和Excel 2010软件进行数据的统计与分析。
三、实验结果分析
(一)兴趣区数据分析
分析两组被试对不同陪伴机器人造型的首次注视时间(FFD)是指兴趣区第一个注视点的持续时间;注视次数(FC)是指在兴趣区内注视点的总数量,注视点个数越多被试对该区域越关注;注视时间(FD)是指在兴趣区内所有注视点的注视时间总和;注视时间比(PFD)是指被试在某个兴趣区内的注视时间与总注视时间的比率;热点图(Heat Map)显示被试在刺激材料上的视线分布情况;轨迹图(Gaze Plots)显示出被试者对刺激材料观察的时间顺序或观察位置以时间。具体实验数据见表2。
(1)FFD:被试类型的主效应显著,F(1,28)=4.89,p=0.027<0.05;陪伴机器人造型的主效应极其显著,F(1,28)=24.79,p<0.001;被试类型与陪伴机器人造型交互时首次注视时间的差异极为显著,F(1,28)=47.87,p<0.001,?p2=0.183。分析可知:陪伴机器人造型变化对被试首次注视时间的影响较大,其中ASD组对Y1和Y2的首次注视时间显著高于其他样本,而TD组被试在Y3和Y4上的首次注视时间最长。


(2)FC:被试类型的主效应显著,F(1,28)=52.39,p<0.001;陪伴机器人造型的主效应极其显著,F(1,28)=54.80,p=<0.001;被试类型与陪伴机器人造型交互时注视次数的差异显著,F(1,28)=53.24,p<0.001,?p2=0.200。分析可知:陪伴机器人造型变化是影响被试注视次数的主要因素,其中Y1和Y2获得ASD组的注视次数最多,而Y3和Y4获得TD组的注视次数最多。
(3)FD:被试类型的主效应显著,F(1,28)=20.90,p<0.001;陪伴机器人造型的主效应极其显著,F(1,28)=81.75,p<0.001;被试类型与陪伴机器人造型交互时注视时间的差异极其显著,F(1,28)=97.89,p<0.001,?p2=0.314;TD组的注视时间(M=0.973,SE=0.022)明显高于ASD组(M=0.834,SE=0.022)。分析可知,ASD儿童的视觉注意力差于TD儿童,其中ASD组在Y2上的注视时间最长,其次是Y1;TD组在Y3上的注视时间最长,其次是Y4;且两组被试对于Y5和Y6所投的注意力都是最少的。
(4)PFD:ASD组的注视情况为:Y2>Y1>Y3>Y4>Y6>Y5,即基本几何形>仿生形>不规则形;TD组的注视情况为:Y3>Y4>Y2>Y1>Y6>Y5,即仿生形>基本几何形>不规则形;
因此可知,ASD组被试与TD组被试对不同陪伴机器人造型的注视情况均存在显著差异。总体而言,基本几何形造型的陪伴机器人能够引起ASD儿童更多的关注与视觉探索,进而提升儿童视觉注意力;而仿生型陪伴机器人可以获得TD儿童更多的兴趣与视觉偏好,进而提升儿童的视觉专注力。
(二)热点图和轨迹图
热点图(Heat Map)中红色表示注视点最集中的区域或视线停留时间最长的区域,黄色次之,绿色表示最少或最短。轨迹图(Gaze Plots)显示出被试者对刺激材料观察的时间顺序或观察位置以及观察某位置的时间,观察时间越久,圆点就越大。
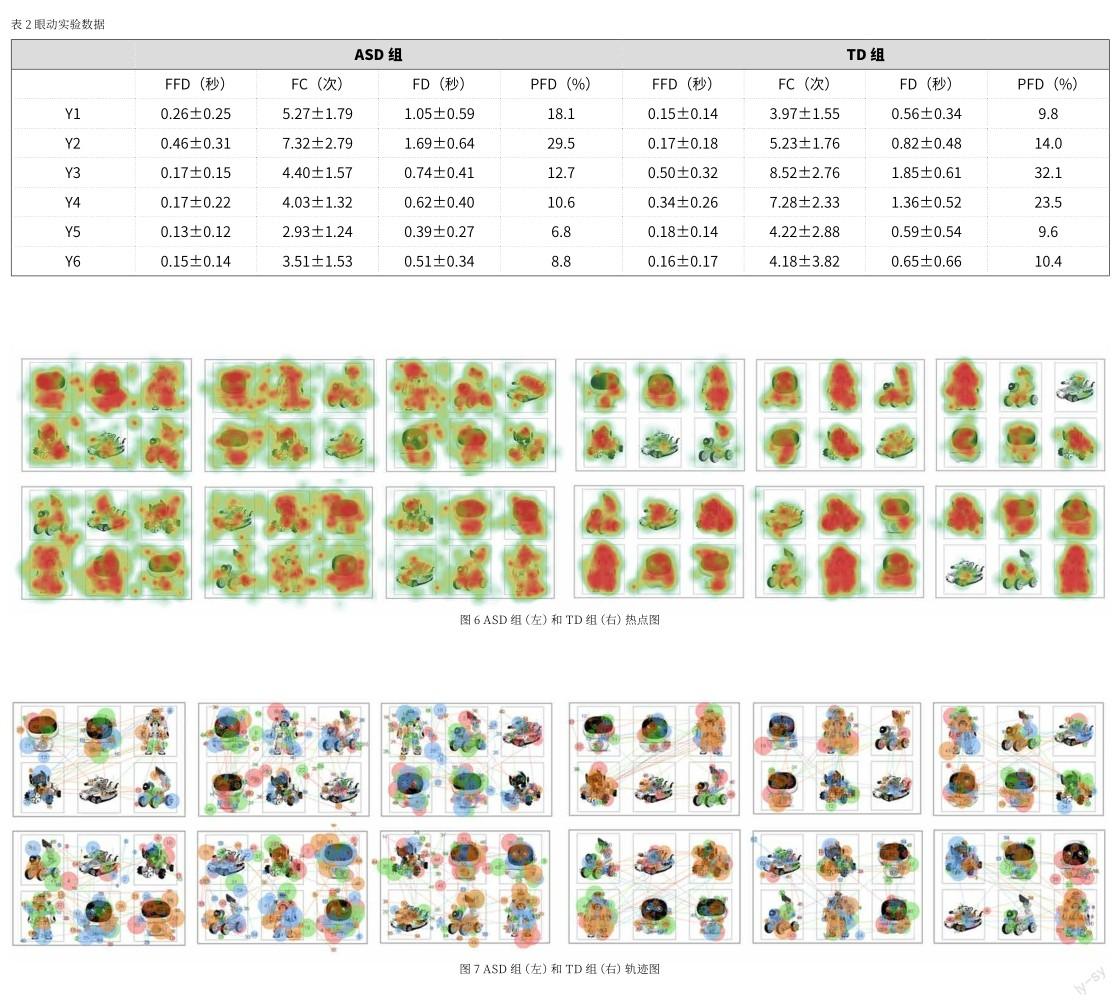
由两组被试的热点图可知,ASD组(见图6左)的热点分布较为稀疏,而TD组(见图6右)的热点分布较为密集,则ASD儿童对信息的关注度低,注意力不集中。ASD组被试在Y1和Y2的热点颜色最深、范围最广,且热点主要集中于机器人的躯干部分,即基本几何形造型是ASD儿童关注的热点区域;TD组被试在Y3和Y4的热点颜色最深、范围最广,的热点区域; TD 组被试在 Y3 和 Y4的热点颜色最深、范围最广,即仿生型造型的陪伴机器人是TD儿童关注的热点区域。两组被试在Y5和Y6的热点颜色最浅,范围最小,但相比于ASD组,TD组对Y5和Y6投入了较多的注意力,这说明不规则形造型对儿童吸引力较小,该结果与表2一致,验证了数据的准确性。
由轨迹图可知,ASD组(见图7左)注视点较为分散,主要集中在陪伴机器人的躯干部分,呈现出一种局部加工的趋势,其中对Y1的注视程度最高,Y3的注视程度最低,且很少注视Y3头部与眼睛区域。而TD组被试(见图7右)的注视热点轨迹干净规整,主要集中在陪伴机器人整体区域,尤其是对头部与躯干的连接部分,表现出视觉加工的整体性和连续性。
因此可知,基本几何形造型的陪伴机器人是ASD组被试注视点最集中、停留时间最长的区域,尤其是躯干部位。而仿生形造型的陪伴机器人是TD组被试视线分布最密集的区域,且视线分布均匀规整。
四、讨论
从热点图和轨迹图可以看出,两组被试的视觉加工区域存在显著差异。ASD组更多的注视陪伴机器人的躯干部分,对头部的注视较少,这可能与ASD儿童独特的视觉加工方式:对局部或细节进行优先加工与面孔回避效应有关。其中,相比于其他陪伴机器人造型头部的注视情况,ASD组被试对Y1的注视最多,对Y3的注视最少,这可能与机器人的眼睛有关,Y1的眼睛为两个简单的圆形,与真人眼睛相似度较低,因此ASD儿童不会刻意回避;而Y3更具人形,其眼睛则更加具体、真实,与真人眼睛的相似度极高,所以ASD儿童会回避对机器人眼睛甚至头部的注视。
因此在ASD儿童陪伴机器人的造型设计中,应优先考虑对陪伴机器人躯干部位的设计,即简化躯干部位的装饰,使其在与儿童交互时能够根据语言和情绪变化反应出清晰的肢体动作,降低儿童的感知觉障碍;机器人眼部的设计采取中等设计元素,避免与真人相似而导致视觉回避行为,采用简单的基本几何图形,如圆形、椭圆等,整体简洁,增强亲和性。
从陪伴机器人整体造型方面进行分析,两组被试对不规则造型的机器人所投入的注意力都是最少的,可能是由于该类陪伴机器人造型中所包含的元素较多,复杂多样, 导致儿童视觉加工困难;ASD组在基本几何形陪伴机器人中的注视次数最多,注视时间最长,可以推论ASD组被试对基本几何形造型的陪伴机器人存在视觉加工优势。
因此在儿童陪伴机器人造型的设计中要减少不规则元素的使用。在ASD儿童陪伴机器人的整体造型设计中,推荐采用基本几何形,且由于儿童具有较强的几何思维能力,几何图形能产生强烈的视觉刺激,进而改善社交障碍,达到更好的干预效果。
结语
本研究以ASD儿童为目标群体,采用眼动追踪法分析ASD儿童对不同造型陪伴机器人的视觉注意偏好,并总结符设计原则。基于对眼动实验结果的分析,对ASD儿童陪伴机器人的造型设计提出以下建议:(1)ASD儿童对基本几何形造型的陪伴机器人的视觉注意显著多于其他造型的陪伴机器人,存在明显的视觉偏好,故而在造型设计时推荐选用基本几何形;(2)ASD儿童对陪伴机器人的躯干部分明显投入了更多的注意力,因此在设计中应优先考虑对躯干部分进行设计;(3)ASD儿童陪伴机器人的眼睛设计尽量采用简单的几何图形,避免与真人眼睛相似。本研究将ASD的视觉偏好与陪伴机器人的造型关联起来,为陪伴机器人的造型设计提供指导,使ASD儿童增强兴趣性、激发积极性、提升体验感,从而达到更好的干预效果。
项目基金:江苏师范大学研究生科研与时间创新计划项目(2021XKT0355)。
参考文献
[1]张文渊. 自闭症的病因、诊断及心理干预[J]. 中国特殊教育,2003(3):73-77.
[2]五彩鹿儿童行为矫正中心. 中国自闭症儿童的发展与现状报告:中国自闭症教育康复行业发展状况报告IV[M]. 北京:北京师范大学出版社,2022.
[3]Joshi G,Faraone S V,Wozniak J,et al. Examining the clinical correlates of autism spectrum disorder in youth by ascertainment source[J]. Journal of Autism & Developmental Disorders,2014,44(9):2117-2126.
[4]李闯,张丙辰,王艳群,赵玉婉.基于视觉提示的自闭症儿童图形符号设计方法研究[J].设计,2020,33(01):148-150.
[5] Joseph A. An Android-Based Mobile Eye Gaze Point Estimation System for Studying the Visual Perception in Children with Autism[J].Systems and Technologies, 2014(10):49-58.
[6]杨丽民. 运用图片交换沟通系统促进学前自闭症儿童沟通能力的个案研究[D].四川师范大学,2012.
[7]Chevalier P,Raiola G,Martin J C,et al. Do Sensory Preferences of Children with Autism Impact an Imitation Task with a Robot? [C]//ACM/IEEE International Conference on Human-robot Interaction. ACM,2017:177-186.
[8]Amat A Z,Zhao H,Swanson A,et al. Design of an Interactive Virtual Reality System,InViRS,for Joint Attention Practice in Autistic Children[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering,2021(99):1-13.
[9]范曉壮.机器人用于自闭症谱系障碍儿童社交技能干预研究的综述[J].现代特殊教育,2015(14):34-37+57.
[10]卜凡帅,赵微,荆伟.学前自闭症谱系障碍儿童视觉搜索优势:来自眼动和瞳孔测量的联合证据[J].中国特殊教育,2016(06):52-58.
[11]刘春丽,王爱红.基于眼动实验的学龄前儿童机器人设计[J].包装工程,2019,40(24):210-216.
[12]王广帅,陈靓影,张坤.基于多重因素混合设计和眼动追踪的自闭症谱系障碍儿童情绪面孔识别[J].科学通报,2018,63(31):3204-3216.
[13]张丙辰,王艳群.视觉意象与列车内装产品造型特征元素的关联研究[J]. 包装工程,2017,40(14):32-36.
[14]杨俞玲,张丙辰,杨杰.基于视觉认知的ASD儿童干预APP导航界面设计研究[J].设计,2022,35(03):56-59.
猜你喜欢
未来英才(2016年19期)2017-01-04
建筑建材装饰(2016年11期)2016-12-29
科教导刊·电子版(2016年26期)2016-11-21
考试周刊(2016年71期)2016-09-20
戏剧之家(2016年7期)2016-05-10
青年文学家(2016年14期)2016-04-29
戏剧之家(2016年2期)2016-03-03
