基于传感器信息融合的地铁车辆在途障碍物检测
2023-09-03 08:06何佳博
交通科技与管理 2023年16期
何佳博


摘要 由于地铁车辆在行驶过程中会面临许多复杂路况及障碍,导致行驶过程中面临的危险性升高。基于此,文章提出基于传感器信息融合的地铁车辆在途障碍物检测方法。通过传感器信息融合进行识别铁轨数据,利用轨道边缘的一个特征点并使用直方图均值化增强图片与周边环境的对比度,选定视觉雷达传感器实时监测铁轨情况,检查障碍物的位置,最后融合障碍物的图像与信息,实现对地铁车辆在途障碍物的检测。实验结果表明:基于传感器信息融合的地铁车辆在途障碍物检测最大误差为0.42 m,而其余两种方法的误差较大,方法1的最大误差距离相较该文方法超出了1.71~0.42=1.29 m,方法2的最大误差距离相较该文方法超出了3.5~0.42=3.08 m,证明了该文方法的可行性。
关键词 传感器;信息融合;地铁车辆;在途障碍物;检测分析
中图分类号 D26.4文献标识码 A文章编号 2096-8949(2023)16-0014-03
0 引言
现代科技水平不断增高,障碍物检测目前被许多城市开始关注,轨道交通的发展、无人机、无人车、无人船等技术的发展,推动了城市轨道交通无人驾驶地铁的发展,而对其中障碍的探测直接影响到列车的安全运行,是当前研究的热点和难点。该文在对地铁车辆在途障碍物探测技术和国内外无人驾驶车辆探测技术进行深入研究的基础上,提出一种基于传感器信息融合的地铁车辆在途障碍物检测方法。文献[1]使用多传感器数据融合技术建立一种障碍物判定系统,该方法使用摄像机探测出障碍物位置,绘制出物体行进过程中的危险区域,增加雷达传感器的控制,当检测到障碍物时,会产生紧急制动,保障物体安全,因此,该文提出相同傳感器信息融合技术的地铁车辆在途障碍物检测方法。
1 基于传感器信息融合的地铁车辆在途障碍物检测方法
1.1 基于传感器信息融合的铁轨识别
传感器信息融合技术是指在传感器中获取相关数据进行联系与综合,实现对目标的精确位置与状态的精确估计,并对目标的态势、威胁及严重性做出全面、及时、实时的评估。将其应用于车辆在途障碍物识别领域,可利用多源异构传感器之间的互补特性,获取的数据更为完整,从而确保车辆对障碍物的准确探测,使其能够对各种复杂的外部环境进行自适应[2]。
铁轨识别是地铁车辆在轨道上安全行驶的重要保证,可有效避免列车与边界内的障碍物、邻近轨道上的设备、建筑发生碰撞。在铁路智能边界监测中,确定轨道边界,是保证列车对行驶前环境感知的基础与先决条件。基于传感器信息融合的轨道识别是利用轨道边缘的一个特征点,它的边缘与边缘之间的灰度差异较大,轨道边缘的连续性比较好,轨道边缘的密度相对于周围的环境来说比较稀疏,其识别流程如图1所示。
根据图1可以了解到图像进行预处理后,使用直方图均值化增强图片与周边环境的对比度,再应用传感器信息融合技术完成铁轨的检测,其图像频域分辨率的函数表达公式如下:
1.2 选定视觉雷达传感器
地铁车辆在行驶途中对轨道内的障碍物进行规避是至关重要的,铁路中存在的障碍可导致列车发生侧向碰撞、脱轨、翻车等重大安全事故,对列车的安全运营和人民的生命财产构成了极大的威胁。障碍探测是城市轨道列车行车安全的前提,对城市轨道列车行车的安全有着十分重要的作用[4]。
对铁轨完成识别后,则要安装视觉雷达传感器。雷达传感器安装于地铁车辆的车头位置,实施扫描轨道平面的情况,检测是否存在障碍物存在的情况。视觉传感器安装在驾驶室的左侧位置,以便实时监测铁轨情况,检查障碍物的位置。图2则为传感器安装的位置示意图。
基于视觉传感器对危险区域进行划分,确定障碍物的存在范围和雷达传感器的探测范围,然后对视觉传感器已经知道的障碍物,与雷达传感器联合探测,对未知障碍物或者光线较差的情况,使用雷达传感器进行探测。雷达传感器的种类优缺点如表1所示。
通过对比上述产品,选择的雷达传感器为velodyne产品。由于激光雷达传感器和视觉传感器的数据传输量都较大,所以需要工业计算机和主控板进行大量的数据处理,从而导致了生产热量的增加,所以为了保证工业计算机和主控板能够长期工作,必须在计算机上安装一台冷却风扇。
激光雷达含有16条扫描线,水平方向的扫描角度为360°,发射对人眼安全的激光束进行扫描,与此同时通过旋转电机带动激光器组件飞速旋转,从而获得激光扫描的点云数据,其表达公式如下:
1.3 融合障碍物的图像与信息
利用激光雷达传感器的测量结果,可以得到目标物体与列车之间的距离信息,并通过列车的坐标系来确定目标物体与列车之间的距离。在雷达传感器获取图像的同时,将摄像机获取的图像信息通过校准矩阵映射到相机的坐标系统,使摄像机的图像信息包含在图像像素中。不同传感器的数据融合,首先要考虑的就是这两个传感器采集的数据在空间和时间上的同步。因为以上对不同传感器的标定已经完成,所以使用的两个传感器采集的数据在空间上实现了同步,在收集数据时,设定不同的传感器具有相同的收集频率,在接收到数据后,利用时间定时器设定固定的时间间隔,使得不同的传感元件所收集到的数据在时间上是同步的。在对障碍物图像进行灰度变换之后,再采用彩色门限分割的方法,实现了对障碍物的提取。这样就能对障碍物对象的大概位置范围有一个直观的认识。该方法采用了基于平均滤波的方法,在三维空间中对障碍物进行滤波,以提高障碍物定位的精度。
2 实验测试与分析
为证明该文提出的基于传感器信息融合的地铁车辆在途障碍物检测方法的有效性,现进行实验测试,通过对比该文方法与传统方法1、2的检测效果。为验证该文方法的正确性,将该文方法运用到试验测试中,并对其能否满足规定的检测标准,能否取得良好的检测效果进行检验。在实验测试之前,需要一些准备工作,保证该实验的准确性。
2.1 实验准备
该次实验选择在Matlab软件中进行模拟测试,将该方法与其余两种障碍物探测方法进行对比,将实际应用在A市的某一辆地铁车辆的参数数据与图像输入软件环境中。首先,制作软件中所需的实验数据集,选取该地铁的路线,生成需要的数据格式,主要步骤如下:选择不同路段的轨道图片,设定图片大小为1 024×1 024。利用标记器对所选择的图片进行标记器,生成训练所需要的文档格式。产生的16位图片被加工为具有可识别性的8位图片。由于实验所用的数据集对应的为地铁A线,需要人工标注所需的数据集位置所在,使用Python软件进行汇编语言,使用QT软件作为标注的界面,并且标注的操作简单。
该实验选择5 000张图像作为测试的数据集,其中包括铁轨直道、弯道等一些路况,数据集的详细数据如表2所示。
实验中卷积层的参数主要包括:卷积核的大小、卷积运算的步长等。随着网络规模的增大,网络的复杂性也随之增大,但由于其数目可以减小,所以其尺寸应与真实网络的尺寸一致。学习率的大小决定了参数学习到最优值的速度。相反,如果学生的就业率太低,就会被拉低到最好的水平。适当的学习率是保证收敛的先决条件,可以尽可能快速地实现收敛,如果在最初的训练过程中,发现目标函数的损失函数值会迅速增加,说明设置的学习率过大,应该减小学习率。
2.2 实验结果与分析
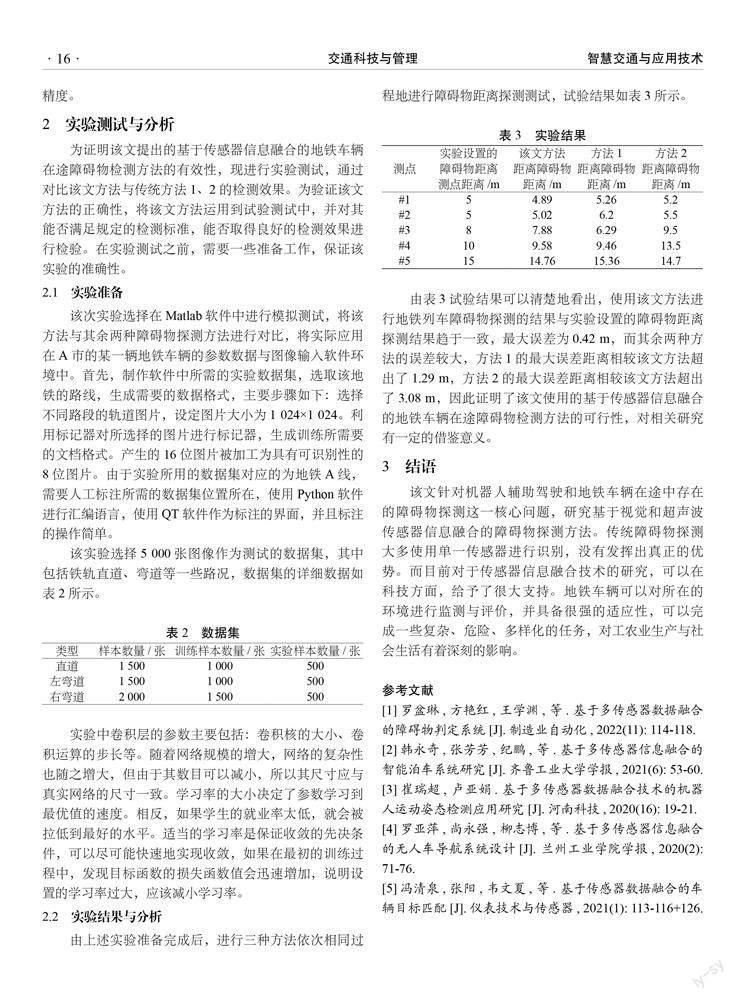
由上述实验准备完成后,进行三种方法依次相同过程地进行障碍物距离探测测试,试验结果如表3所示。
由表3试验結果可以清楚地看出,使用该文方法进行地铁列车障碍物探测的结果与实验设置的障碍物距离探测结果趋于一致,最大误差为0.42 m,而其余两种方法的误差较大,方法1的最大误差距离相较该文方法超出了1.29 m,方法2的最大误差距离相较该文方法超出了3.08 m,因此证明了该文使用的基于传感器信息融合的地铁车辆在途障碍物检测方法的可行性,对相关研究有一定的借鉴意义。
3 结语
该文针对机器人辅助驾驶和地铁车辆在途中存在的障碍物探测这一核心问题,研究基于视觉和超声波传感器信息融合的障碍物探测方法。传统障碍物探测大多使用单一传感器进行识别,没有发挥出真正的优势。而目前对于传感器信息融合技术的研究,可以在科技方面,给予了很大支持。地铁车辆可以对所在的环境进行监测与评价,并具备很强的适应性,可以完成一些复杂、危险、多样化的任务,对工农业生产与社会生活有着深刻的影响。
参考文献
[1]罗盆琳, 方艳红, 王学渊, 等. 基于多传感器数据融合的障碍物判定系统[J]. 制造业自动化, 2022(11): 114-118.
[2]韩永奇, 张芳芳, 纪鹏, 等. 基于多传感器信息融合的智能泊车系统研究[J]. 齐鲁工业大学学报, 2021(6): 53-60.
[3]崔瑞超, 卢亚娟. 基于多传感器数据融合技术的机器人运动姿态检测应用研究[J]. 河南科技, 2020(16): 19-21.
[4]罗亚萍, 尚永强, 柳志博, 等. 基于多传感器信息融合的无人车导航系统设计[J]. 兰州工业学院学报, 2020(2): 71-76.
[5]冯清泉, 张阳, 韦文夏, 等. 基于传感器数据融合的车辆目标匹配[J]. 仪表技术与传感器, 2021(1): 113-116+126.
猜你喜欢
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
小学生学习指导(低年级)(2019年6期)2019-07-22
小太阳画报(2018年3期)2018-05-14
阅读与作文(小学低年级版)(2016年12期)2016-12-22
汽车文摘(2015年11期)2015-12-02
中国火炬(2014年11期)2014-07-25
城市道桥与防洪(2014年5期)2014-02-27