宽带多波束渔用声呐显控系统设计及关键技术研究
2023-09-14 11:46宗艳梅唐学大楚树坡谌志新李国栋
海洋渔业 2023年4期
宗艳梅,唐学大,楚树坡,谌志新,2,李国栋,2
(1.青岛海洋科技中心,山东青岛 266237;2.中国水产科学研究院渔业机械仪器研究所,上海 200092)
宽带多波束渔用声呐作为探测海洋生物资源的重要声学设备,在渔船航行时利用声波探测鱼群方位、密度和距离等信息,可实现对水下目标的快速定位和精准探测,大幅度提高了海洋渔业捕捞效率,在渔业探测领域有着重要应用[1-4]。
宽带多波束渔用声呐采用距离分辨率更高的宽带信号,同时接收多个波束,数据量较大,给显控系统实时接收处理回波数据带来了巨大的挑战[5-6]。同时,由于可选择的探测量程差异大,图像需根据屏幕分辨率自动进行插值或压缩处理,对声呐图像显示的实时性要求不同,CPU缓存的数据量也不同,给显控系统提高处理速度带来了一定的难度。由于海洋水下各种噪声和混响的存在,导致声呐图像混杂了各种噪声,如高斯噪声、斑点噪声等,对分辨鱼群目标有一定的影响[7-8]。而用户是直观地通过显示界面来获得鱼群的相关信息,较低的图像分辨率对于用户识别鱼群信息有一定困难。因此,宽带多波束渔用声呐显控系统直接决定了渔用声呐的性能。近几年,微电子技术和人工智能技术的快速发展,为研制宽带多波束信号处理主机带来了新的技术发展方向[9-11],全方位宽带多波束、鱼群跟踪识别等关键技术及渔用装备研制迎来了新一轮的技术革命[3,11-13]。传统的多波束探鱼仪的显控系统已无法满足当前宽带多波束渔用声呐的显示需求,因此亟需开发一套适用于宽带多波束渔用声呐海量数据实时可视化的显控系统。
本文开展了宽带多波束渔用声呐显控系统的设计,采用多线程技术实时处理数据,并针对提高声呐图像显示分辨率开展了一定的研究,采用双立方插值将声呐图像可视化,并分别使用多种滤波算法对声呐图像滤波去噪,运用图像增强技术对声呐图像增强显示。经过声呐图像处理,本文设计的宽带多波束渔用声呐显控系统可显著提高渔用声呐图像的目标分辨率。以期对渔业生产的精准探测和高效捕捞提供帮助。
1 材料与方法
1. 1 宽带多波束渔用声呐工作原理
宽带多波束渔用声呐(探鱼仪)实质是一种主动声呐系统,利用声波在水中的传播和遇到物体反射原理来判别鱼群及其状态参数[14-15]。宽带多波束渔用声呐通常采用宽带信号全向或波束旋转发射,同时形成多个接收波束来提高探测效率[16]。相比其他探鱼仪,宽带多波束探鱼仪可进行远距离、高分辨率探测,其探测鱼群效率更高[14,17-18]。
宽带多波束渔用声呐系统主要由换能器基阵(通常为收发兼用)、升降机构、发射机、接收机、电源、收发转换器、显控系统及外围模块等几个部分组成,其工作原理如图1所示。宽带多波束渔用声呐显控主机根据用户需要,首先进行工作参数配置并下发给发射机,发射机对信号进行一系列处理后到达换能器基阵,将电信号转为声信号向水中发射,根据声波在水中遇到不同目标产生回波的原理,换能器基阵各阵元接收回波信号和噪声,将其转换为电信号,电信号经过信号处理,形成多个波束[15,17]。声呐数据通过网口发送到显控主机,显控主机对原始数据预处理后可视化,并对声呐图像经滤波、增强等处理后,最终将鱼群信息在显控终端显示出来[15,19]。
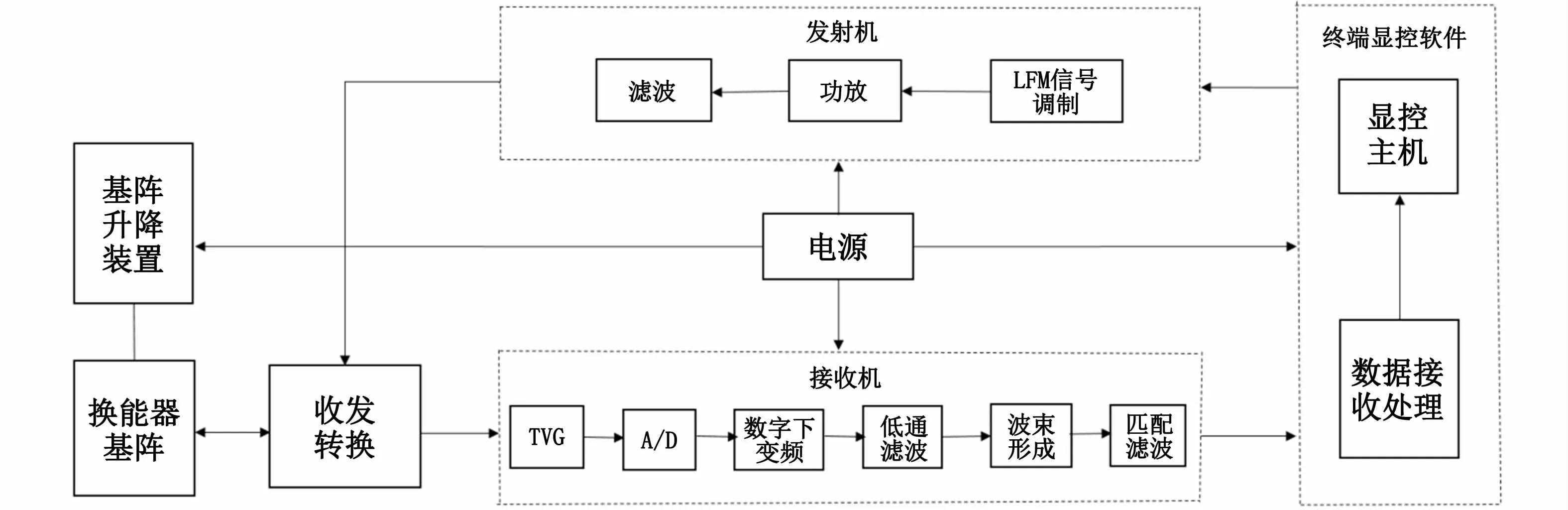
图1 宽带多波束渔用声呐工作原理框图Fig.1 W orking princip le block diagram of w ideband multibeam fishery sonar
1. 2 显控系统整体设计
1.2.1 总体架构设计
宽带多波束渔用声呐系统可实现360°水平全向扫描,探测量程达4 000 m,实时探测数据量巨大,图像更新不及时,会导致丢帧或CPU缓存数据较多,直接影响显控主机的性能。另外,探鱼仪组成硬件设备较多,工作机制复杂,给显控系统的计算机软硬件带来巨大的挑战[20]。因此,显控系统的关键是在保证安全友好的可视化图像的同时,平衡好声呐硬件设备负载、数据采集及处理的稳定性。根据用户需求及实际环境,本文将显控系统整体架构设计为控制层、显示层和数据层3层架构,如图2所示。

图2 宽带多波束渔用声呐显控系统整体架构图Fig.2 Overall architecture of w ideband m ultibeam fishery sonar disp lay and control system
本文显控系统通过UDP协议实现信号处理主机与显控系统的数据通信,由控制层通过显控系统向信号处理主机发送配置参数、指令参数等来控制声呐系统的总体运行状态。显示层通过UDP通讯接口接收声呐数据并进行多线程数据解析并进行数据处理,处理后的声呐数据将在显控系统实时图像显示和更新。数据层通过UDP协议将声呐原始数据进行存储,保证了数据存储的完整性,存储历史数据可以将声呐图像再现,也便于后期进行其他数据分析或检测使用。
1.2.2 系统模块划分
本文系统采用模块化的设计思想,根据显控系统的功能划分为4大模块,即任务栏模块、控制参数配置模块、显示参数配置模块及声呐图像显示模块。如图3所示。

图3 宽带多波束渔用声呐显控系统功能模块划分Fig.3 Function module division of w ideband multibeam fishery sonar display and control system
根据显控系统模块划分及功能要求,每个大模块下细分小的功能模块,经Visual Studio开发平台设计完成界面布局如图4所示。任务栏模块包含常用的数据存储、回放设置、板卡温度设置、滑窗设置等参数设置。控制参数配置模块可设置量程、信号长度、TVG增益等相关控制参数,主要用来配置控制信号处理主机的相关参数及工作模式等。控制参数还包含指令参数的设置,如参数下发、循环发送和单次发送等,根据用户需要配置对应的指令参数。显示参数模块主要是对声呐图像模块的设置,可以对声呐图像显示的外观、布局等进行设置。声呐图像显示模块根据扫描模式可实现3种图像的显示,即水平图像显示、垂直图像显示和指向性图像显示,历史数据回放可实现回放指定历史数据的声呐图像再现。各功能模块间互相协作,保证了整机系统的稳定运行。

图4 宽带多波束渔用声呐显控系统Fig.4 W ideband multibeam fishery sonar display and control system
1. 3 试验方法
本试验在中国水产科学研究院渔业机械仪器研究所消声水池(长18 m×宽9 m×深6 m)内进行。在本次水池试验中,换能器采用256路圆柱型基阵,采用全向发射的LFM信号,发射倾角为0°,发射电压为20 V,发射脉宽为2 ms,发射周期为100 ms。本次试验采用发射机和接收机分离的测试方法,换能器与0 dB目标入水深度基本保持一致,水平距离为8 m。上位机接收数据经过预处理、坐标变换和图像处理后经显控系统可视化成像是360°圆形声呐图像。本文设计的显控系统参数配置及水池试验声呐图像如图5所示。
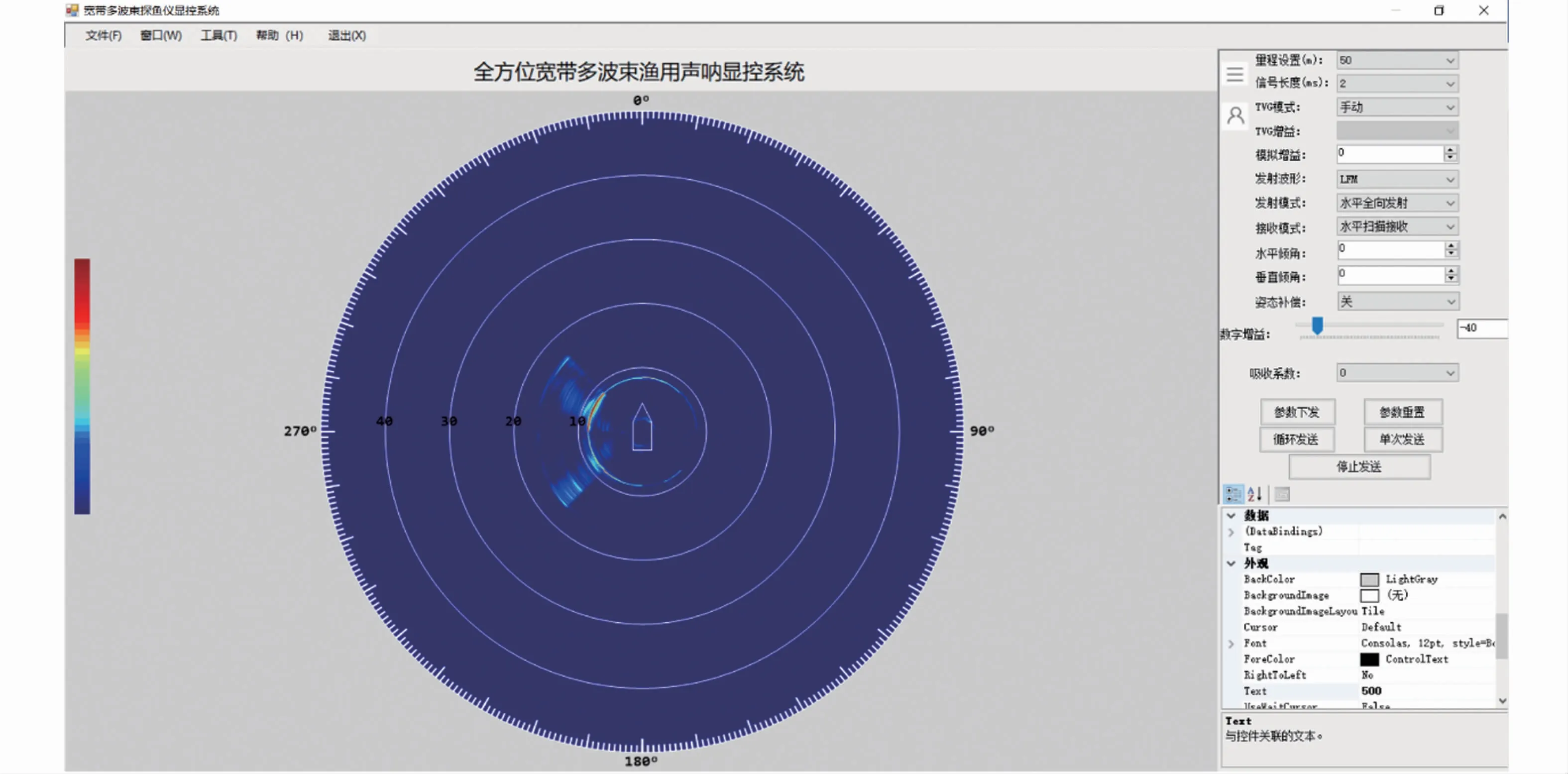
图5 显控系统水池试验整体界面图Fig.5 Overall interface diagram of disp lay and control system pool test
2 结果与分析
2. 1 渔用声呐图像可视化
2.1.1 仿真试验及结果分析
宽带多波束渔用声呐利用采集到的回波数据方位、距离和强度等信息参数生成原始声呐图像。由于各个波束与声呐之间只有距离和开角的概念,而计算机显示器的像素点是在笛卡尔坐标系以点阵排列的,因此图像在由极坐标向笛卡尔坐标转换的过程中,要尽量减少转换过程所带来的信息损失,对于转换后的扇形区域出现的未被像素填充的盲区,还需要利用成像数据对其进行插值处理,方可将扇形声呐图像更完整的呈现出来[16,21]。
目前在渔用声呐数据可视化过程中常用的插值算法有最邻近插值算法(NNIA)、双线性插值算法(BLIA)以及双立方插值算法(BCIA)。NNIA简单高效,可以快速完成声呐图像的生成[16]。BLIA是渔用声呐成像过程中常用到的算法之一,该算法运用三次线性插值,很好地保留了图像的原始信息,避免了拟合声呐图像后产生的失真[16,22]。BCIA采用了更多的数据点参加计算,能生成更高质量的声呐图像。该算法的核心是插值权值的构造考虑了相邻波束回波点在距离和方位上的相关性,并根据回波点与待插值点的位置关系计算得到每个回波点的距离权值和角度权值,最终将邻近回波点的加权像素值作为待插值点对应的像素值[16,23]。
为了客观评价不同插值算法的可视化效果,模拟了宽带多波束渔用声呐图像(图6-a),并分别运用NNIA、BLIA、BCIA 3种插值算法进行仿真,其成像结果如图6所示。实验采用峰值信噪比(PSNR)作为可视化效果的定量评价指标,如表1所示。

表1 仿真试验3种插值算法峰值信噪比(PSNR)值分析表Tab.1 PSNR value analysis table of 3 interpolation algorithms in simulated test
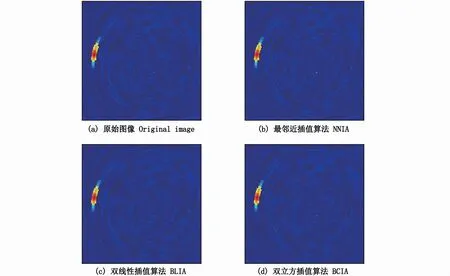
图6 不同插值算法对模拟声呐图像显示效果的影响Fig.6 Influence of different interpolation algorithm s on the display effect of analog sonar images
根据图6和表1可以看出,NNIA扇形图像的远端,相邻波束间的开角较大,对盲区没有进行填充,会造成图像中信息的失真。BLIA效果较好,但插值后的图像的高频分量受到损失,会使声呐图像轮廓变的模糊,降低了图像质量。BCIA的PSNR最高,克服了前两种算法的不足,声呐图像边缘效果较好,看起来更光滑。定量评价和模拟成像效果均表明BCIA具有较好的渔用声呐成像效果。
宽带多波束渔用声呐可探测量程高达4 000 m,接收的原始数据量较大,需对原始数据进行预处理,并且根据可视化屏幕分辨率对图像进行压缩处理。本研究经过了两个步骤对声呐图像进行压缩,第一步是通过滑窗[22]算法对原始数据进行了压缩,第二步是经可视化成像后对声呐图像进行了第二次压缩。经过两次的压缩处理,既保证了保留关键目标信息,同时声呐图像可自适应屏幕显示,图像压缩技术是渔用声呐图像可视化非常关键的一步。
2.1.2 水池试验及结果分析
为提高声呐图像显示分辨率,分别对其进行最邻近插值、双线性插值、双立方插值算法处理,经算法处理后声呐图像更细腻。通过消声水池试验,在不同插值算法处理后,本文显控系统渔用声呐图像如图7所示。图8为不同插值算法处理后声呐图像目标边缘图像信息。
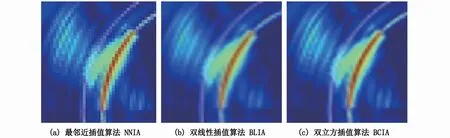
图8 不同插值算法声呐图像边缘效果Fig.8 Edge effect of sonar image w ith different interpolation algorithms
图7和图8分别是在人眼视觉下判断不同插值算法的可视化效果,采用峰值信噪比(PSNR)作为可视化效果评价指标,表2所示为3种插值算法的PSNR值分析表。

表2 水池实验3种插值算法峰值信噪比(PSNR)值分析表Tab.2 PSNR value analysis table of three interpolation algorithms in pool test
从图7和图8可以看到,采用最邻近插值算法后的图像目标边缘成锯齿状,双线性插值算法由于没有考虑数据的变化率,得到的图像目标边缘模糊,而双立方插值算法图像边缘效果较好。根据表2定量评价结果也可看出,双立方插值算法的可视化效果对于渔业声呐图像质量较好。因此,本文选择双立方插值算法作为宽带多波束渔用声呐显控系统的声呐图像可视化算法。
2. 2 渔用声呐图像滤波
2.2.1 仿真试验及结果分析
宽带多波束渔用声呐探测水下目标时,回波信号会受到混响、海洋环境噪声和浮游生物等的干扰,导致声呐图像存在较强的噪声干扰,从而降低图像质量,给后期图像处理带来不便[25]。为了提高视觉效果,声呐图像去噪技术已被广泛应用于特征提取、目标识别、图像分割等领域[26]。
经典的声呐图像滤波方式有线性滤波和非线性滤波两种。线性滤波对高斯噪声有较好的效果,但当信号频谱与噪频谱混叠时,其滤波效果不是很好,常用的线性滤波主要有均值滤波和高斯滤波。非线性滤波在滤波的同时能较好地保持图像细节,目前应用较为广泛,常用的非线性滤波方法主要有中值滤波和双边滤波[26-28]。
为客观评价各种滤波算法的去噪效果,模拟宽带多波束渔用声呐图像,如图9-a所示,对模拟的声呐图像加入高斯噪声如图9-b所示。分别采用中值滤波、均值滤波、高斯滤波和双边滤波4种经典的声呐图像去噪方法进行滤波处理。经滤波处理后声呐图像如图9所示。采用PSNR对各种滤波方法定量分析其性能,如表3所示。
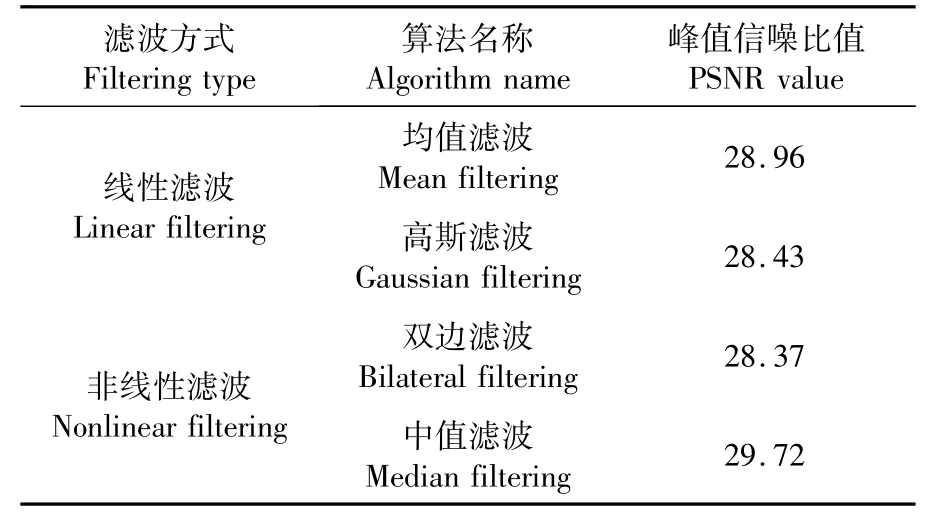
表3 仿真试验不同滤波算法峰值信噪比(PNSR)值分析表Tab.3 PNSR value analysis table of different filtering algorithms in simulated test
根据图9和表3可以看出,均值滤波和高斯滤波在去噪的过程中会造成较明显的边缘模糊,双边滤波能较好地保护声呐图像的边缘信息,但是对声呐图像高频细节的保护效果并不好。中值滤波的PSNR最大,其滤波效果也最好,该算法具有较强的自适应性,在去除白噪声和叠加噪声上具有较好的效果。
2.2.2 水池试验及结果分析
根据本文2.2.1节所述声呐图像滤波原理,对本次试验声呐图像进行滤波去噪,分别对图像进行中值滤波、均值滤波、高斯滤波和双边滤波处理,各种滤波效果如图10所示。
采用峰值信噪比(PSNR)作为定量指标来对比分析各滤波方法性能,如表4所示。
通过图10和表4可以看出,经中值滤波算法滤波后图像分辨率更高,其PSNR值达到26.13。通过试验分析和算法验证,渔用声呐图像经中值滤波去噪处理后,得到较好的视觉平滑效果。因此,本文选择中值滤波算法作为渔用声呐图像的滤波算法。
2. 3 渔用声呐图像增强
2.3.1 仿真试验及结果分析
图像增强技术是按照某种特定的需求,突出图像中有用的信息,去除或者削弱无用的信息,其目的是使处理后的图像更适合人眼的视觉特性或易于机器识别。图像增强技术可以作为目标识别、目标跟踪、特征匹配、图像融合、超分辨率重构等图像处理算法的预处理算法[7]。
渔用声呐图像增强技术可在空间域和频率域分别进行,空间域的直方图均衡化是图像增强处理中最典型、最简单有效的方法,其采用灰度统计特征,将原始图像中的灰度直方图从较为集中的某个灰度控件转为均匀分布于整个灰度区域范围的变换方法,通常分为全局直方图均衡和局部直方图均衡。全局直方图均衡的优点是简单速度快,可自动增强;缺点是对噪声敏感、细节信息易失。局部直方图均衡的优点是局部自适应,可最大限度的增强图像细节,其缺点是增强图像质量操控困难,并会引入噪声。
为客观评价各种图像增强算法的增强效果,模拟宽带多波束渔用声呐图像,如图11-a所示,对模拟图像经直方图均衡方法增强处理后的彩色图、灰度图及直方图如图11所示。
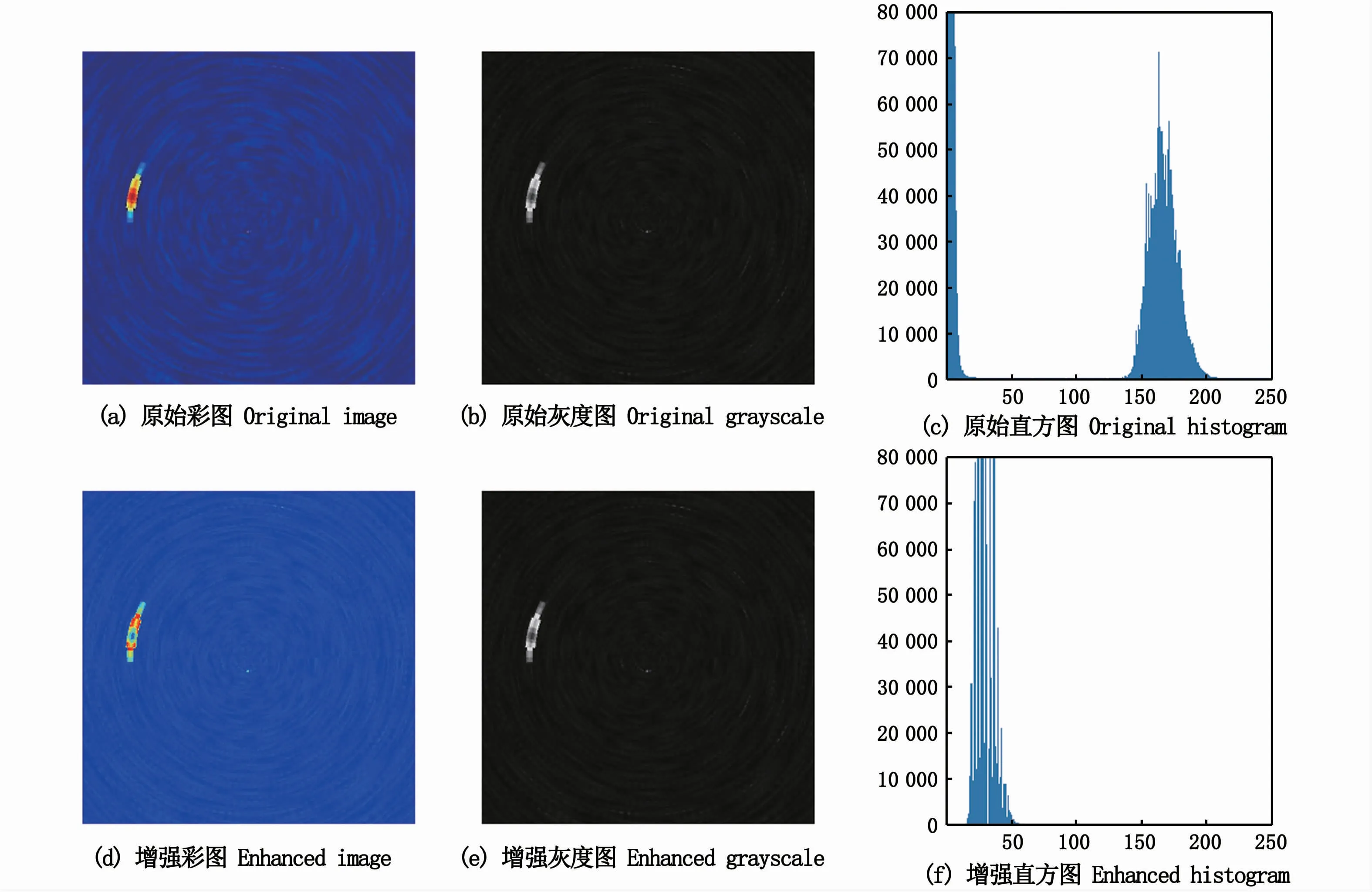
图11 图像增强对模拟图像显示效果Fig.11 Image enhancement for analog im age disp lay effect
通过图11可以看出,经过局部直方图均衡化算法增强后,原始声呐图像的直方图峰值不再那么高,增加了像素灰度值的动态范围,图像整体亮度提高,色彩更均衡,有效提升了图像的亮度和细节。
2.3.2 水池试验及结果分析
为更好地验证图像增强技术在渔用声呐图像处理中的效果,本次试验采用直方图均衡化增强算法对声呐图像增强处理,并分别对原始图像及增强后的图像灰度图及直方图展示,增强前后的声呐图像如图12所示。
如图12所示,经直方图均衡化处理后的声呐图像对比度及亮度明显提升,目标也更为突出,并且处理后图像直方图的灰度分布也更加均衡。因此,在渔用声呐图像处理中运用图像增强处理方法可有效增强图像,以便更易识别目标。
3 讨论
本研究设计的宽带多波束渔用声呐显控系统采用3层架构设计,数据处理采用多线程技术,确保宽带多波束渔用声呐图像海量数据接收、处理及显示的实时性,并可实现原始数据的实时存储及回放功能。马燕芹和司纪锋[29]、王栋和司纪锋[30]等对多频探鱼仪显控软件也有研究,但主要是对信号采集、数据保存及处理等方面进行了设计和研究,并没有对声呐图像处理及显示进行阐述。本研究对显控系统整体架构设计、功能模块划分、声呐数据处理与保存和声呐图像处理及显示进行了自主设计、开发和试验,经过水池试验,验证了自主研发的显控系统功能稳定且具有一定的通用性。
本研究渔用声呐图像可360°全方位显示,对声呐图像自适应屏幕和缩放有一定困难,同时,因为水下环境的复杂性,噪声对声呐图像可视化效果影响较大。针对该问题,本研究采用不同插值算法、滤波算法及图像增强技术处理声呐图像,并分别进行了仿真试验和水池试验。试验结果对比分析,验证了基于双立方插值的可视化图像显示效果优于其他插值方法,中值滤波去噪后的声呐图像显示更平滑,增强后的声呐图像目标显示更突出。因此,经过合适的声呐图像处理算法,可以提高渔用声呐的显示分辨率及可视化效果,并可有效识别目标,提高探测捕捞效率。
本研究显控系统经过了多次的水池试验,验证结果表明系统的功能达到预期效果,且具有一定的稳定性,但仍需要进一步的湖上试验和海上试验来验证系统的最大探测量程和最高显示分辨率等探测性能是否均达到最优效果。基于人工智能和深度学习的声呐图像处理是当今的发展大趋势,对渔用声呐图像的处理算法需要进一步结合人工智能、深度学习和神经网络等关键技术,提高声呐数据处理的实时性和声呐图像的目标分辨率,并深耕鱼群智能识别与跟踪技术研究,将探测、识别和跟踪技术综合运用到声呐显控系统中。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
家庭影院技术(2021年3期)2021-05-21
铁道通信信号(2020年5期)2020-09-21
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
通信技术(2019年3期)2019-05-31
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
铁道通信信号(2016年10期)2016-06-01
四川师范大学学报(自然科学版)(2015年4期)2015-02-28