
单投影线结构光的室外投影成像研究
2023-09-16 20:53欧建良,周乐恒,陈奎佑,连佳琪,周婷英
国土资源导刊 2023年3期
关键词:激光雷达
欧建良,周乐恒,陈奎佑,连佳琪,周婷英


摘 要:激光扫描技术,从室内外地面架站到无人机机载,已经广泛应用在国土资源测量及基础设施检测各方面,具有实时生成三维数据、对作业平台稳定性要求高的特点。相比于激光扫描,结构光具有带状面阵同步观测能力,能降低自身移动振动对观测质量的干扰,但在室外环境作业方面受限明显。对此,在已有算法基础上,设计改进单线结构光投线仪,取得了“白天室外70米距离上投影线三维提取”的技术进展。
关键词:激光雷达;室外环境;结构光;投影线增强
中图分类号:TP391 文献标志码:A 文章编号:1672-5603(2023)03-105-04
Research on Outdoor Projection and Imaging with Single Projection Contour Structured-light
Ou Jianliang1,Zhou Leheng2, Chen Kuiyou1,Lian Jiaqi1,Zhou Tingying1
(1.College of Civil Engineering, Yango University, Fuzhou Fujian 350015;
2.College of Civil Engineering, Fuzhou University, Fuzhou Fujian 350116)
Abstract: Laser scanning technology (LiDAR), ranging from indoor and outdoor surface stations to unmanned aerial vehicles, has been widely used in various aspects of land and resource measurement and infrastructure detection. It has the characteristics of real-time generation of three-dimensional data and high stability requirements for the work platform. Compared to laser scanning, structured-light has the ability to synchronously observe with a strip array, which can reduce the interference of its own moving vibration on the observation quality. However, it is significantly limited in outdoor environmental operations. In this regard, based on the existing algorithms, this article designs and improves a single contour structured-light projector, achieving technological progress in "3D extraction of projection contours at a distance of 70 meters outdoors during the day".
Keywords: LiDAR; outdoor environment; structured-light; projection contour enhancement
0 引言
激光雷達(light detecting and ranging, LiDAR)不依赖目标表面纹理特征,通过点扫描获取目标高密度三维点云,实现目标三维测量,以室内外地面架站与无人机搭载等方式,广泛应用在国土资源测量及基础设施检测各方面[1-3]。由于LiDAR以激光束稳定有效发射接收为基础,以及表面扫描需一定时间,对表面光滑平整、反射率较高物体的扫描效果很好,而对地表植被、堤坝边坡等削弱反射能力的情况,实际测量能力显著降低[4,5]。当LiDAR在车载、无人机连续移动平台上作业时,则因为光束扫描的时序性特点,受平台动态干扰产生点云丢失、整体精度降低等问题。
与激光雷达LiDAR不同,结构光测量将动态光学特征与瞬间静态二维图像相结合,具有投射特征精确提取、二维图像消减动态时序干扰等特点[6-8],其基本工作模式为:立体图像测量中,以一定投影模式(如光刀)光学投射代替一个像机,对成像特征标定约束后,再以摄像方式解算待测对象表面投影特征的三维坐标[6-9]。结构光测量一直是实验力学和光测领域的研究前沿,当被观测对象难以通过摄影测量、激光扫描有效工作时,该模式还能获得稳定高质量的测量结果[10-15]。但受具体算法和工作模式限制,结构光测量目前主要是用于室内或半室内的流水线机械零部件等小尺度工业测量。以光刀法为例,其基本模式主要适用于系统自身位姿不变、视觉深度与宽度均较小的情况,如物料或电路板以皮带传输等方式运动条件下的断面三维测量[2];由于投影线聚焦深度小,使得测量量程有限,待测对象尺寸增加时在其表面的投影轮廓线无法维持聚焦,使得投影中心线连续精确提取难以进行[11]。
室外地形地物测量,其空间尺度通常都是上百米,所在外部环境更是全室外光照状态。现有结构光测量模式对此存在明显不足,主要是光学特征投射在太阳大气环境下不明显、结构光成像不实用,以及各单元间相对姿态难以长期精确保持等;另一方面,适用于室外远距离的LiDAR设备价格昂贵、对国外厂家依赖性大,如果结构光测量能通过自主研发达到室外环境有效作业的能力,将具有很好的应用前景。
1 理论研究
随着待测物体与仪器之间距离增加,室外结构光投射三维视觉测量能力显著下降甚至无法工作,除了环境光照对投射特征干扰使得像机无法对结构光特征有效记录,还有另一个因素就是现有结构光投影设备自身的问题,以单线结构光投影方式为例说明:投线仪发射功率角度不变,而与待测对象距离增大后,投射到待测对象单位长度的能量密度显著下降。
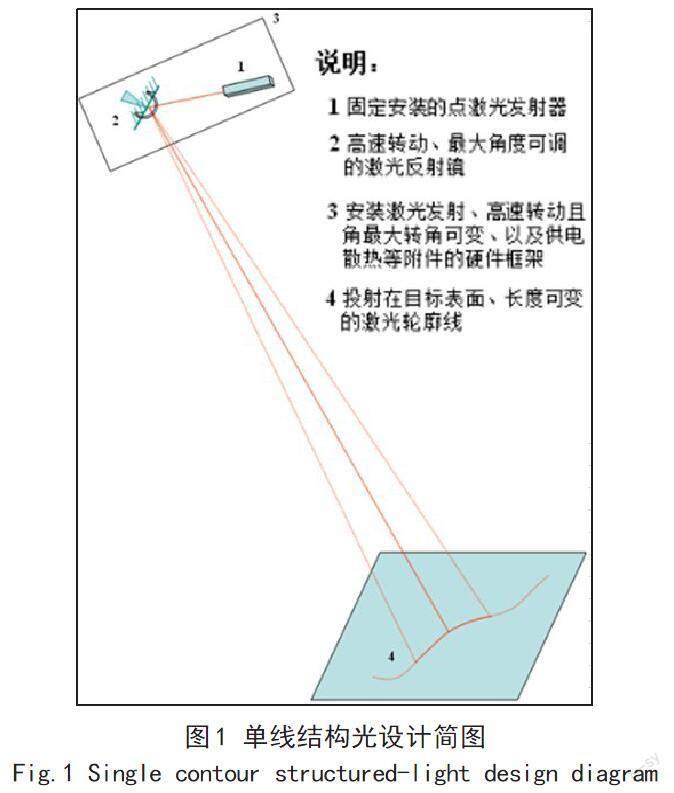
对此,本文设计定制出一种可根据待测对象尺度和距离远近,调节发射角度的新型线结构光,结合已有研究提出的投影线提取算法[4,7],无需做复杂的测距调焦,通过调节发射角控制投影线长度及投影点重返频率,实现不变摆速的投影线强度可控,该新单线投影结构光设计如图1所示。
2 技术路线
本文基于图1所示方案,采用高出瞳功率工业激光点光源,高速往复摆动投射在待测物表面,可获得曝光时间10毫秒内的连续投影线图像。简单来说,该单线结构光特点有:(1)激光点发射功率与摆动角速度不变,調节最大摆角控制固定距离上投影线长度变化;(2)被测对象距离光源近时增大最大摆角,让投影线长度按需加长即扩大投影线扫描范围;(3)同等几何尺寸被测对象距离光源远时,减小最大摆角,增加单位时间重复扫描频率,从而提高对投影线的光学成像质量;(4)仅做摆动限角调节,无需复杂的测距调焦,结构简单易实现。加装本文研制的单线结构光单元后实验系统工况如图2所示。
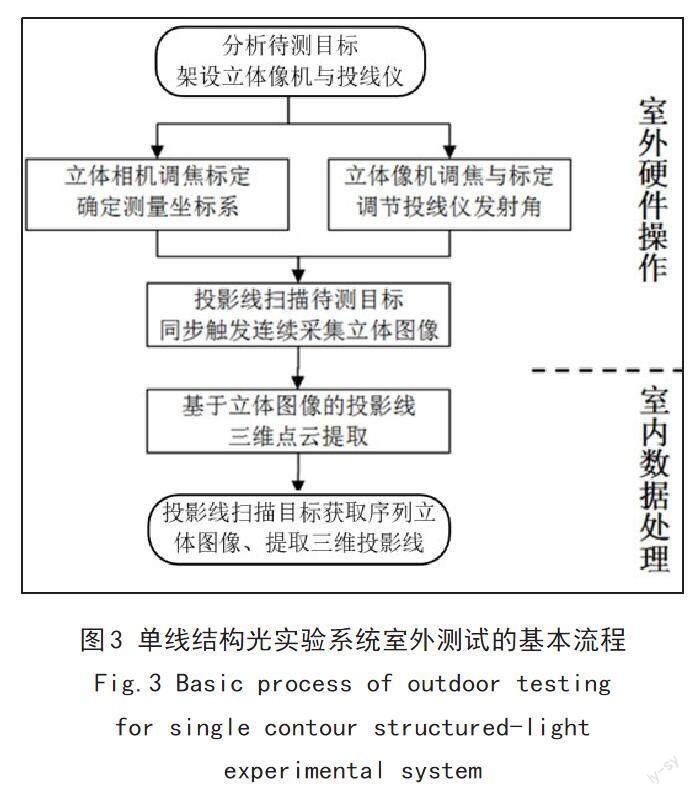
为检查研制单线结构光的室外扫描有效性,本文基于自研算法与实验系统,设计了室外实验工作的技术流程图如图3所示。
3 实验分析
对于设计定制单线结构光,本文采用图3技术流程,开展了大量实验测试。以下两个实验,可以较好的说明本文研制单线结构光在室外环境下的有效性,展开说明如下:
3.1 室外70 m距离上雕塑投影扫描
实验人员于长沙某高校实验大楼13楼窗口架设双工业像机与单线结构光(单层楼高3.5 m),斜下视对准室外地面雕像(图4中红色虚线椭圆圈出部位),其空间尺寸大致为“高3 m×长8 m×厚0.5 m”,与实验大楼边缘平面距离大致50 m,因而从13楼窗口到雕像的斜距约70 m。在雕塑四周及不同凸起部位贴上打印的合作标志(图4中的黑白棋盘格),通过全站仪测定独立坐标系下合作标志三维坐标,以此做双像机相对于该局部坐标系的内外参数标定;通过调节投影线最大扫描角度,使得投影线完整覆盖雕塑,单线结构光在手动操作下实现对雕像表面的投影扫描,双目像机以每秒5 hz频率同步成像,经过实验软件处理得到雕塑表面投影线三维线。由于是手动扫描,投影线间距不是很均匀,实验情况如图4所示。
3.2 室外基坑内土堆水泥柱投影扫描
该实验在中科院武汉岩土所的某中型基坑现场进行,实验条件是“春夏之交、中午无遮挡太阳直晒下”,扫描对象是距离实验系统10 m左右的半干半湿土堆及水泥柱。经过投影线发射角调节,做到对双目像机视场内土堆与水泥柱的完整覆盖,实验系统采集的是灰度图像(投影线即图5(b)中白色条纹)。本次实验前,单线结构光已安装在步进电机转盘上,通过运动控制箱转动,带动投影线在双目相机视场内匀速扫描。由于得到步进电机支持,投影线间距均匀度得到显著改善,实验情况如图5所示。
4 结语
已有实验表明,本文研究的单线结构光,避免了不同距离上聚焦的复杂操作,定制实现快、可靠性好,在已有算法支持下,能显著提高室外结构光测量作业的有效性,可实现“室外70 m距离扫描、米级尺度目标覆盖扫描”等阶段性目标。接下来,课题组将开展多站提取投影线拼接、基础设施扫描精度分析等方面工作,进一步优化结构光室外实验系统。
参考文献/References
[1]向晶,郝伟,刘飞. 激光雷达测量技术及其应用研究[J].科技创新导报,2019.16(10):49+51.
[2]刘浩然,徐刚,张文明. 基于候选深度信息的水泥熟料三维重建方法[J]. 光学学报, 2010, 30(8): 2329-2332.
[3]吴浩,黄创,张建华,等.GNSS/GIS集成的露天矿高边坡变形监测系统研究与应用[J].武汉大学学报(信息科学版),2015,40(5):706-710.
[4]张小虎,欧建良,苑云,等.投影轮廓线辅助下的堆场三维形貌摄影测量研究[J].光学学报,2011,31(6):99-106.
[5]王之卓. 摄影测量原理[M]. 武汉:武汉大学出版社,2007.
[6]张广军. 视觉测量[M]. 北京:科学出版社,2008.
[7]Ou J L, Zhou J, Zhu X W,et al.Large Stack-yard Three-dimensional Measurement Based on Videogrammetry and Projected-contour Scanning[J].Optical Engineering,2012.06,51(6):061304.
[8]林辉. 高动态范围光亮表面的结构光三维形貌测量方法研究与实现[D].广州:广东工业大学,2017.
[9]于起峰,尚洋,伏思华,等. 大型结构变形及形貌摄像测量技术研究进展[J]. 实验力学,2011.26(5):479-490.
[10]吴庆阳. 线结构光三维传感中关键技术研究[D].成都:四川大学,2006.
[11]杨建华,杨雪荣,成思源,等. 线结构光三维视觉测量中光条纹中心提取综述[J]. 广东工业大学学报 31(1):74-78.
[12]Bell T, Zhang S. Toward superfast three-dimensional optical metrology with digital micromirror device platforms[J].Optical Engineering,2014.53(11):112206-1~9.
[13]Nguyen H, Nguyen D, Wang Z Y,et al.Real-time,high-accuracy 3D imaging and shape measurement[J].Applied Optics,2015.54(1): A9~A17.
[14]范建华. 基于线结构光的三维视觉表面测量系统关键技术研究[D]. 广州:中山大学,2015.5.
[15]杨德山,董丽丽,梁倩倩,等.大型散货堆体积的快速测量[J].光学精密工程,2016,24(9):2126-2133.
猜你喜欢
北京测绘(2022年5期)2022-11-22
中国交通信息化(2021年8期)2021-11-02
汽车观察(2021年8期)2021-09-01
空间科学学报(2020年6期)2020-07-21
甘肃科技(2020年21期)2020-04-13
中国交通信息化(2019年1期)2019-03-26
电子测试(2018年22期)2018-12-19
电子制作(2018年16期)2018-09-26
中国交通信息化(2018年7期)2018-09-14
光学精密工程(2016年1期)2016-11-07
