雷达装备机电液理虚实综合教学平台设计与实现
2023-09-20 04:06权建洲李晓峰焦盼德李纯仁
中国教育技术装备 2023年10期
关键词:实训
权建洲 李晓峰 焦盼德 李纯仁
摘 要 为满足雷达装备机电液系统保障教学需求,基于理虚实一体化教学理念,充分发挥虚拟现实技术与实装实训的优势,对原有的雷达天线自动调平举升实训台电气控制系统和软件系统进行升级,升级后该教学平台综合原理讲解演示、虚拟拆装训练、实操训练、故障诊断于一体。实践表明,该平台可以有效激发学员的学习兴趣,为提升教学质量提供有力支撑。
关键词 雷达装备机电液;综合教学平台;实训
中图分类号:E252 文献标识码:B
文章编号:1671-489X(2023)10-0032-06
Design and Implementation of Comprehensive Experimental Platform for Radar Equipment Hydromechatronics//QUAN Jianzhou, LI Xiao-feng, JIAO Pande, LI Chunren
Abstract In order to meet the teaching needs of ra-dar equipment hydromectronics, based on the inte-grated teaching concept of theory, virtual reality and reality, the original electrical control system and software system of radar antenna automatic le-veling and lifting training platform are upgraded, giving full play to the respective advantages of virtual reality technology and experimental training, and integrating principle explanation and demons-tration, virtual disassembly, practical training and fault diagnosis. Practice shows that the platform can effectively stimulate students interest in learning and provide strong support for improving teaching quality.
Key words radar equipment hydromectronics; compre-hensive experimental platform; training
Authors address Radar Sergeant School, Air Force Early Warning Academy, Wuhan, China, 430019
0 引言
現代战争中地面雷达有着举足轻重的作用,自20世纪90年代以来,机电液技术因其独特的优势,在雷达天线自动调平、举升与翻转中得到越来越广泛的应用[1-5]。为满足雷达装备机电液系统保障教学需要,开发雷达天线机电液自动调平架撤实训台,该实训台自建成后,在培养雷达装备机电液系统保障专业人才中发挥了重要作用。但在长期教学实践中发现该实训台存在一些不足:
1)功能相对较为单一,仅有天线调平、举升翻转等操作训练功能,没有专门设置故障排查训练等功能;
2)控制系统实现上与实装有差距,如支撑腿着地检测方式与实际装备不符;
3)信息化技术手段运用不足,如缺少对机电液系统的演示讲解、排故训练功能不充分、缺少考核模块等问题。
近年来,以虚拟现实技术为代表的信息技术因其交互性好、沉浸感强,可以有效提升学习者的学习兴趣、激发探索创新等优势,在教学训练中得到了广泛的应用[6-10]。因此,有必要基于理虚实一体化教学理念,对原有的雷达天线自动调平举升实训台电气控制系统和软件系统进行信息化改造,融合现代计算机技术、虚拟现实技术、仿真技术、系统集成技术等先进技术,对实训台软硬件进行全面升级,将相关的机电液理论知识、虚拟操作、实操实训、维修训练、考核评价等模块集成在雷达装备机电液理虚实综合教学平台下,各模块相互独立、互为补充,平台将课程教学的理论和实践相结合,将虚拟仿真与实际操作相结合,学习者可通过自主式、沉浸式、互动式的学习,达到所学即所用,所用即其所学,使其在雷达装备机电液系统保障人才培养中发挥更大效益。
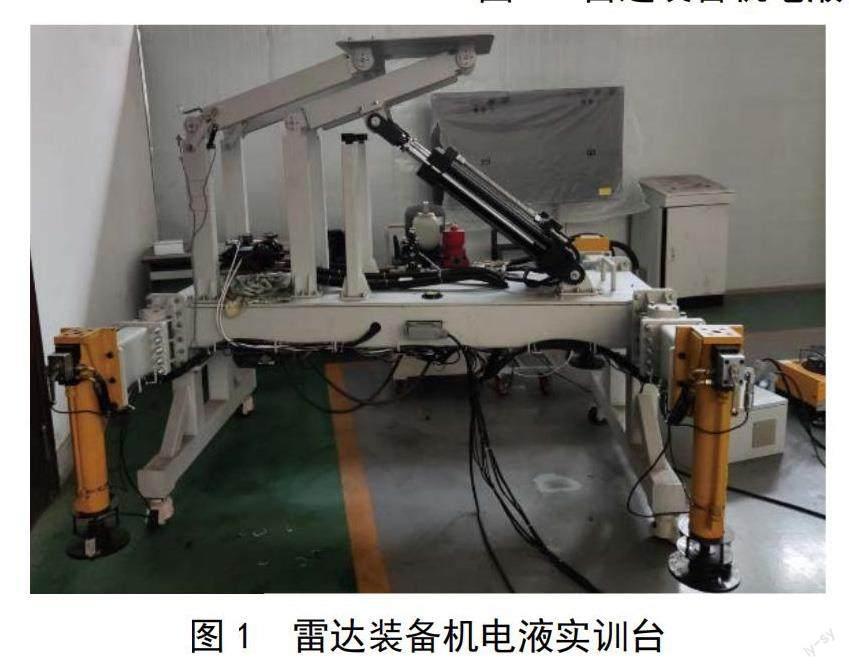
1 实训台简介
现有的雷达装备机电液实训台如图1所示。该实验台由模拟天线座车的支撑平台、水平传感器、控制箱、支撑腿及锁紧装置、天线举升框架、举升支腿等部分组成。其中,支撑平台模拟天线座车,在其下方设置四条固定长度的机械支撑腿,用于实训台在处于非工作状态时承载整个实训台重量。四个液压油缸分别安装在固定框架的四个侧面作为调平支撑腿,在调平时,通过分别控制四个液压缸的伸出量,进行调平实验。举升框架用于模拟实现雷达天线的举升,该框架采用平行四边形结构,分别与固定框架和举升油缸铰接。通过两个举升油缸驱动天线举升平行四边形框架,从而实现天线的举升和撤收。双向水平传感器安装在支撑平台的中心,用于获取支撑平台平面坐标X轴和Y轴方向的水平误差信号。
2 综合教学平台升级要求
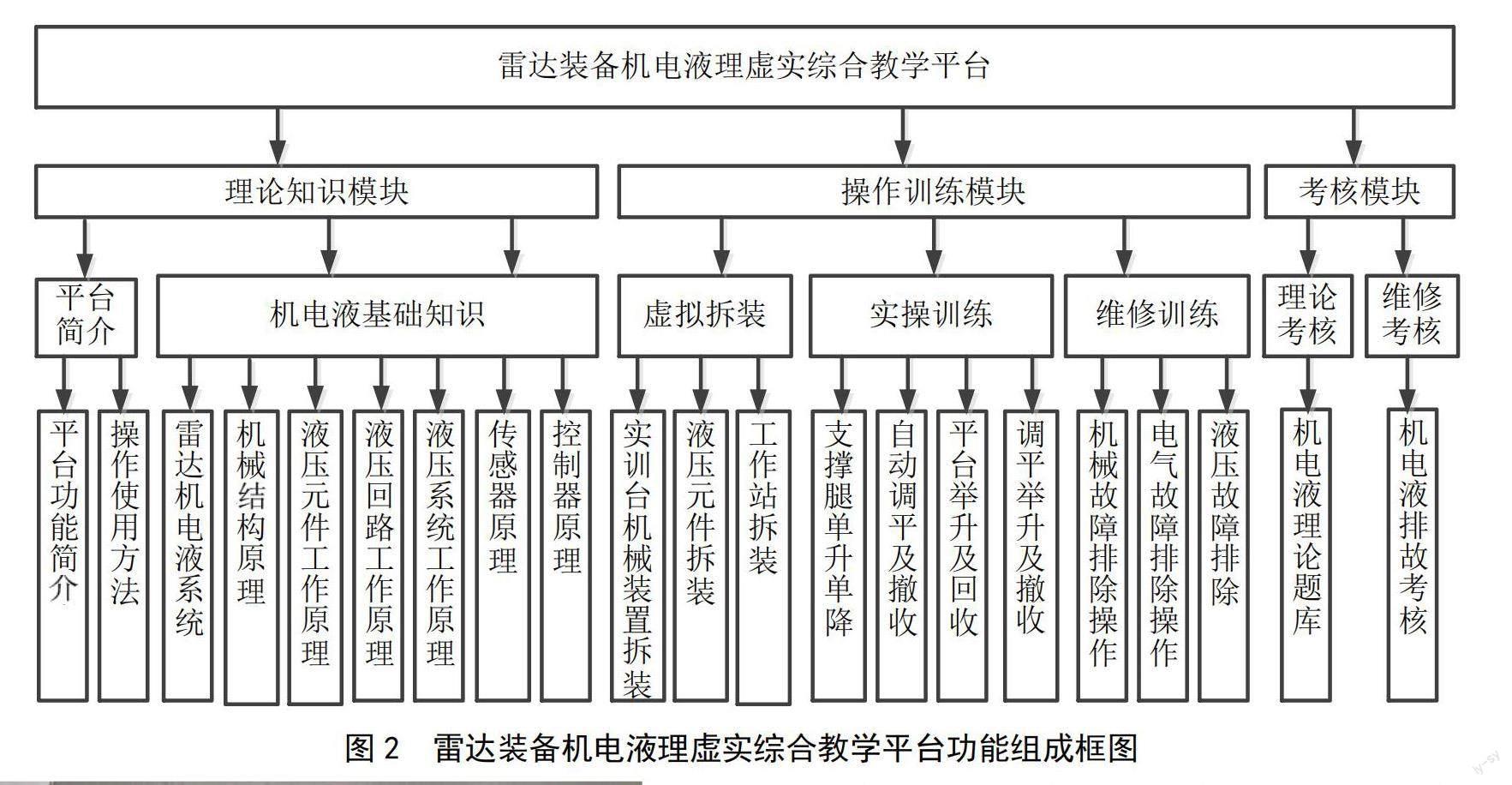
雷达装备机电液理虚实综合教学平台按照功能分为三大模块:理论知识模块、操作训练模块、考核模块。其中,理论知识模块对实训台中涉及的机电液理论知识,包括机械系统(调平机构、调平腿机构及翻转机构)、液压系统(液压元件、液压回路及液压系统)及电器系统(传感器及PLC)等相关知识,通过视频、动画、微课等形式进行讲解与演示。操作训练模块由虚拟拆装训练、实操训练及维修训练组成。虚拟拆装训练包括机械机构的虚拟拆装、液压原件虚拟拆装等;实操训练包括对实训台实现平台自动调平、举升、回收,系统故障自动检测、显示、上报,通过VR技术同步演示系统操作及三维动画影像;维修训练包括对实训台机电液故障进行诊断与排除的综合训练。考核模块主要是针对机电液理论知识和机电液系统的故障排除考核。具体功能如图2所示。
3 综合教学平台升级方案设计
3.1 总体方案设计
为满足功能指标要求,同时,考虑教学要求,雷达装备机电液理虚实综合教学平台系统总体架构如图3所示,主要由工业控制计算机(IPC)、可编程逻辑控制器(PLC)、虚拟仿真硬件设备(VR头盔、操作手柄及定位器)、触摸显示屏、双倾角传感器、压力传感器、位置开关等传感器组成。整个系统以工业控制计算机为核心,控制系统各模块之间的协调和数据存储等任务;PLC作为实训台控制中心,通过接受工控机的命令,采集压力传感器、水平检测仪、位置传感器等传感器信息,完成系统自动调平、举升及撤收等功能。VR头盔、操控手柄和定位器以及安装在工业控制计算机IPC的插槽中高性能独立显卡,配合完成虚拟仿真拆装训练;两台大型显示屏用于分别显示虚拟操作过程和工控机操作界面,便于实时教学讲解演示操作。
3.2 理论知识模块开发
理论知识模块中采用高清大屏幕显示器展现教学演示功能,工业控制计算机(IPC)作为理论知识模块数据存储与播放设备,理论知识内容来源于相关教材,相关动画素材为实装测绘后形成的2D图像或3D动画。结构组成及原理演示主要采用Unity3D+C#软件平台开发,由爆炸图和键盘鼠标交互操纵实现,通过精确的爆炸图展示机械结构、液压原件的装配关系,通过键盘鼠标点选需要装配的构件,拖动拆装路线可以实现结构拆装顺序的检验。利用组态软件,实现传感器(双轴水平传感器、压力传感器、位置传感器)工作原理讲解与动画演示、PLC控制装置工作原理讲解与动画演示等功能。
3.3 操作训练模块开发
操作训练模块主要由虚拟拆装子模块、实操训练子模块和维修训练子模块构成,涵盖平台安装、拆卸、实际操作、故障维修的完整训练过程。
3.3.1 虚拟拆装子模块
虚拟拆装子模块主要实现液压元件的虚拟拆装和机械及液压机构的虚拟拆装训练。充分考虑系统构建的合理性、经济性、稳定性以及扩展性等诸多综合因素后,提出以下设计方案。仿真系统结构如图4所示。
1)三维建模。液压雷达调平举升平台三维模型的建立是液压虚拟拆装系统建设的基础,也是后续液压VR系统基本回路实验、液压系统仿真的实现基础。首先需要基于SolidWorks三维建模软件对综合平台进行建模,构成完整的三维模型系统。
2)三维模型的修饰、渲染及导入。首先,将建
好的三维模型转化成stl格式,导入3DMax中,对零部件的中心位置坐标轴进行调整,对模型导入后缺失的点、线、面进行优化处理,并根据实际情况附上材质;其次,进一步利用Photoshop软件制作精美的贴图,配合模型在 Unity3D中使用;最后,将3DMax中渲染完成的模型导出为fbx格式,导入到Unity3D开发平台中,进行场景内容制作、UI 界面设计等VR实验系统开发。
3)界面优化、虚拟实验场景制作。结合模型和课程实验,制作VR虚拟实验场景和交互功能的设计,主要包括结合实验需求的UI界面、基于C#脚本语言编程操控的虚拟场景人机交互。
4)发布。将开发调试好的系统选择PC端平台发布,生成可直接执行的VR实验系统。最终使用HTC Vive Pro2.0进行VR实验系统的人机交互,实现液压雷达调平举升平台虚拟拆装系统的虚拟场景漫游、平台结构展示、虚拟拆装练习、虚拟拆装实训等模块功能。
3.3.2 实操训练子模块开发
硬件改造主要涉及人机交互系统的改造及配合控制系统所需的传感器及电气线路改造等。控制系统以可编程逻辑控制器PLC作为控制中心,主要完成泵站的启停控制,实训台的自动调平、手动调平,天线举升、撤收控制等功能;增加压力传感器用于检测液压撑腿的压力,当压力传感器组达到设定压力时,表明液压撑腿着地成功;為防止出现“虚腿”现象,增加了触地传感器。四个支腿油缸由四路电磁阀独立控制,以完成平台的整体升降,并根据双倾角传感器反馈平台的位姿进行姿态调平;天线的架设、撤收由两只举升油缸完成,设置同步分流集流阀以实现油缸的同步动作,在油缸前端均设置有锁止阀,可使实验台在断电后仍保持状态不变。液压系统原理如图5所示。工控机作为上位机,通过PLC实时通信实现了实训操作过程中,虚拟场景与实际设备的同步演示。虚拟场景与实物同步原理如图6所示。
3.3.3 维修训练子模块
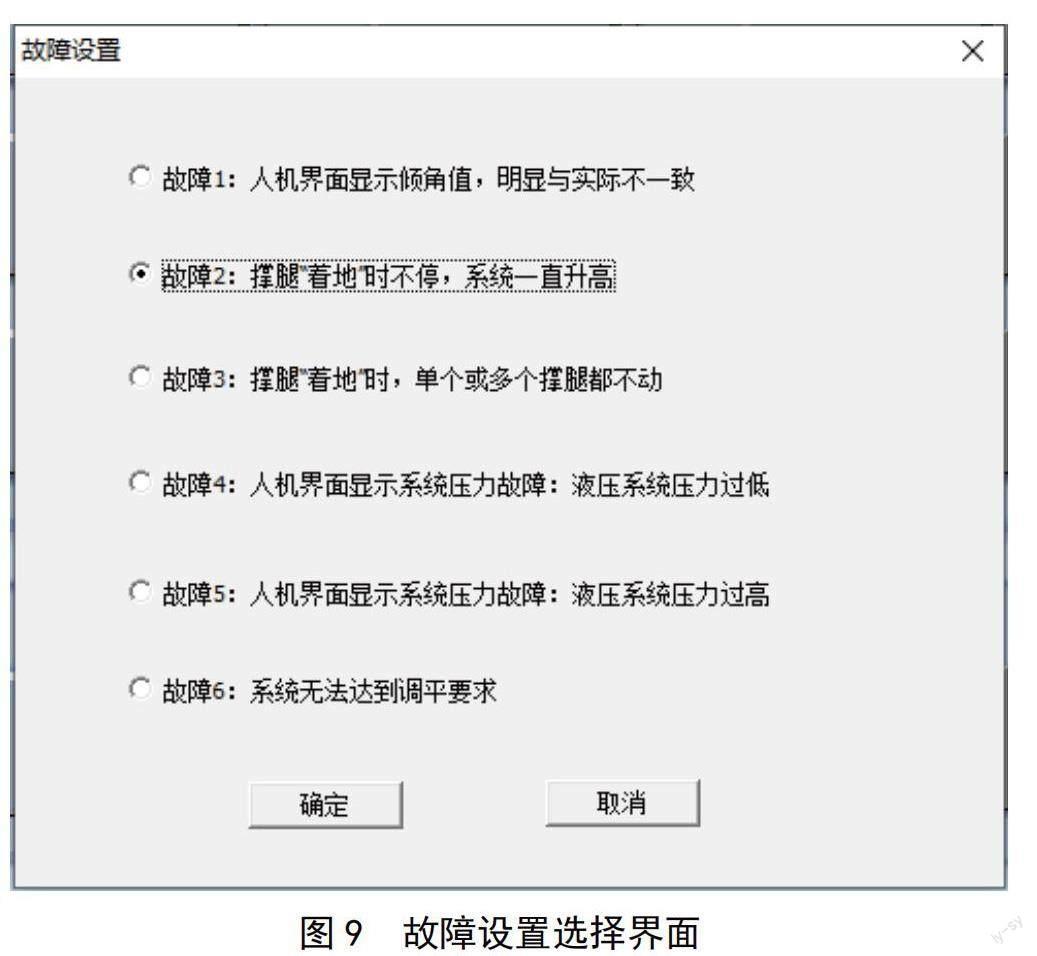
该模块主要通过预设多种传感器组、附设电路、信号屏蔽、虚假显示设置等方式,实现器件故障的检测、油路泄漏等的检测指示。根据系统的特点和教学需求,设置的故障主要包括:人机界面显示倾角值与实际明显不一致;撑腿“着地”时不停,系统一直升高;撑腿“着地”时,单个或多个撑腿都不动;人机界面显示系统压力过低、过高;油缸无动作,系统无法达到调平要求等。在训练过程中,系统中有专家系统进行排故提示,对故障现象和排故策略、流程、方法进行指导,其操作粒度精确到元件级别。水平传感器故障导致人机界面显示倾角值与实际不一致的情况如表1所示。
3.3.4 考核模块开发
考核模块主要由理论考核子模块、维修考核子模块构成。该部分的设计拟采用理论考试系统配合维修实操系统共同完成。理论考试系统包含机电液相关知识点题库,题目以客观题(选择、判断)为主,考试开始时系统自动抽取试题库,组卷供学员进行理论考试,考试结束后系统自动判卷并保存成绩,同时理论考试系统具有考试结果统计分析、学员成绩报表、打印等功能。维修考核是机电液故障排除考核,教员通过高压球阀、水平传感器、位置传感器组、压力继电器组随机设置故障,学员通过观察及思考进行系统故障的识别及排除,故障排除结束后系统自动打分。
4 雷达装备机电液理虚实综合教学平台应用
在使用雷达装备机电液理虚实综合教学平台时,打开电源开关,电源指示灯亮,系统进入工作状态,登录注册账号进入主控选择界面,通过点击不同的按钮进入相应的操作模式。系统流程如图7所示。
4.1 实训台操作训练与考核
实训台操作有四个选项:操作模式、培训模式、考核模式和教学演示模式。图8为操作模式界面,在该模式下,通过选择不同按钮,可以实现参数设置、工控/机械操作面板的切换、手动/自动切换,实现单腿伸缩、自动调平举升等。培训模式与考核模式的界面与操作模式下的界面基本相同,在培训模式下,教员可以手动设置故障让学员进行故障排除训练,如图9所示,选择要设置的故障选项点击确定进入故障模式,然后按照正常模式进行操作。当系统故障现象出现时,系统会停止工作并且弹出故障提示,学员需要针对当前故障现象判斷故障原因并排除故障。在考核模式下,系统会随机给出五个不同故障让学员针对不同故障进行故障排除考核,当五个故障都排除完成后系统会自动打分,考生点击“确认”按钮后即可结束考核。在教学演示模式下,可观看雷达液压举升系统的教学演示视频。
4.2 虚拟操作训练
点击虚拟操作训练界面后,首先进入虚拟拆装系统的主场景,操作人员戴上VR头盔,通过按下操作手柄的圆盘键实现在场景的指定区域内移动,同时按下圆盘键和扳机键点击装备介绍按钮、拆卸学习按钮、装配学习按钮、拆卸实操按钮、装配实操按钮、液压缸按钮、换向阀按钮、溢流阀按钮、液压拆卸按钮、液压装配按钮、调平拆卸按钮、调平装配按钮、举升拆卸按钮、举升装配按钮后会进入相应的子场景;点击退出系统按钮后会退出系统。虚拟操作训练场景图如图10所示。
5 结束语
为满足雷达装备机电液教学需求,基于理虚实一体化教学理念,对原有的雷达天线自动调平举升实训台电气控制系统和软件系统进行了升级,充分发挥虚拟现实技术与实验实训各自的优势,开发了集原理讲解演示、虚拟拆装、实操训练、故障诊断于一体的雷达装备机电液理虚实综合教学平台。实践表明,该平台对创新装备机电液课程教学模式、提高教学质量提供了有力的支撑作用,同时,为其他相应装备维修保障类实验平台的开发提供了借鉴参考。
6 参考文献
[1] 陈常明,丁飞,江伟.某车载雷达结构总体设计[J].机械与电子,2018,36(9):56-59.
[2] 夏鑫.某型军用雷达车自动架撤电液控制系统研究[D].成都:西南交通大学,2018.
[3] 武雷.车载高机动雷达一键式自动架撤控制系统研究[J].电子机械工程,2017,33(5):21-23,64.
[4] 严诺,江伟,王劲宣.某高机动雷达天线举升机构液压系统设计[J].科技展望,2015,25(21):112-113,115.
[5] 林潘英.基于ARM的车载雷达调平及举升系统的设计[D].南京:东南大学,2015.
[6] 赵铭超,孙澄宇.虚拟仿真实验教学的探索与实践[J].实验室研究与探索,2017,36(4):90-93.
[7] 刘亚丰,余龙江.虚拟仿真实验教学中心建设理念及发展模式探索[J].实验技术与管理,2016,33(4):108-111,114.
[8] 杜月林,黄刚,王峰,等.建设虚拟仿真实验平台探索创新人才培养模式[J].实验技术与管理,2015,32(12):26-29.
[9] 孙伟峰,杨华,齐玉娟,等.C/C++程序设计多元协同实验教学平台构建[J].实验室研究与探索,2019,38(3):144-148,233.
[10] 盛雪云.虚拟仿真,引领教育变革新时代[J].在线学 习,2021(12):67-69.
猜你喜欢
计算机教育(2020年5期)2020-07-24
装备制造技术(2020年12期)2020-05-22
电子制作(2019年10期)2019-06-17
福建教育学院学报(2019年4期)2019-06-12
计算机测量与控制(2017年6期)2017-07-01
电子制作(2017年8期)2017-06-05
工业设计(2016年11期)2016-04-16
信息记录材料(2016年4期)2016-03-11
新时代职业教育(2016年4期)2016-02-06
汽车维修与保养(2015年7期)2015-04-17