基于优化深度学习的三维无源目标定位方法
2023-09-20 10:36莫愿斌
计算机仿真 2023年8期
何 颖,莫愿斌
(广西民族大学人工智能学院,广西 南宁 530006)
1 引言
近年来,无源定位在电子作战中占据重要地位,成为军事领域的热门话题。无论是战略观察,还是给予对手干扰,都离不开无源目标定位技术。该技术可以在不暴露自身位置的情况下,准确获取目标位置,凭借作用距离长、不容易受到外界干扰等优势被广泛应用,对提高作战能力有很大作用[1]。对于三维无源目标定位而言,采集越多位置信息定位越精准,但面对海量数据时,会适得其反,不仅定位速度下降,而且还影响定位精度。
广大学者针对上述问题展开了广泛研究,并找到一些合理的解决办法。例如有学者提出了一种基于联合概率数据关联的无源定位算法。构建联合概率关联架构,在该架构基础上获取关联数据的后验概率密度函数,计算此函数和高斯函数之间的散度值;结合后验密度函数实现对目标方位的估计。文献[2]研究一种无源目标位置代数解算法,针对波达方向与到达时差方程做线性处理,分析方程误差,利用加权最小二乘算法求解,通过矩阵不断迭代,定位到目标位置。
随着计算机视觉技术的不断发展,深度学习算法逐渐应用到定位技术中[3]。其中,卷积神经网络在三维目标定位技术中显现出较大优势,此种网络结构有很好的特征提取能力,可提高定位精度。但三维无源目标定位的数据采集一般来自激光雷达,数据存在一定稀疏性,如果使用经典卷积神经网络处理数据,则会降低网络运行速度,甚至产生定位误差。为解决这一问题,本文提出一种面向三维无源目标定位的深度学习算法优化研究。在卷积网络(CNN)架构基础上生成卷积稀疏并行算法,通过构造多个中间矩阵改善密集卷积[4],加快网络处理速度;设置损失函数,减少定位误差。
2 三维无源目标定位数据采集与处理
本文使用激光雷达传感器采集定位目标的三维数据。此种采集技术具有非接触性,可以直接获取目标表面数据,且数据质量较高,另外采样频率和分辨率都能满足要求。针对该技术构建如图1所示的数据采集架构。
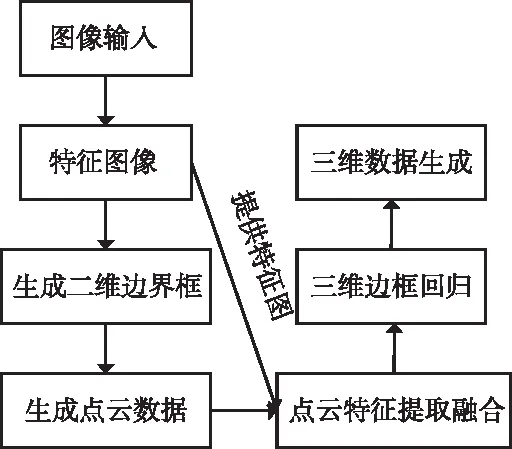
图1 数据采集架构示意图
由图1可以看出,该检测架构是在二维检测器和三维边界框的基础上建立的,通过采集二维图像,生成三维点云数据。但是生成后的点云数据还不能直接用于深度学习算法的分析,还需做进一步处理。
要想确保深度学习算法能够很好地实现目标定位,就需要在三维空间内完成数据配准,即刚体运动[5]。这是一种简单的平移、旋转变换,结合齐次坐标系方法,将点云集合的变换转换为所有采样点的变换,具体操作如下:
假设S代表点云数据集合,行数和列数分别表示为X和Y。此时集合S就是由X行Y列的点构成的矩阵,如果Q是其中任意一点,则数据集S即可描述为:
S={Q(m,n),m=1,2,3,…,X,n=1,2,3,…,Y}
(1)
式中,m和n分别代表点Q在矩阵中的行、列索引值。则有Q(m,n)=(x,y,z),其为此点的三维信息,(x,y,z)就是坐标值。
如果点Q的坐标表示为(x,y,z,1),假设其平移变换后的坐标为(x′,y′,z′,1),则平移后Q′的坐标可通过下述公式计算得出:
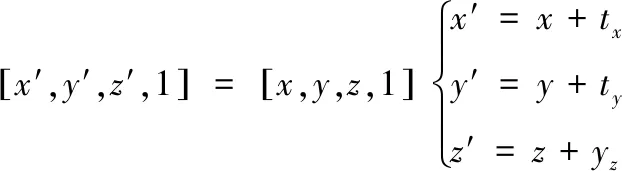
(2)
式中,x′、y′和z′代表不同坐标的偏移量。
在旋转变换中,如果旋转角度为θ,则数据空间旋转描述为
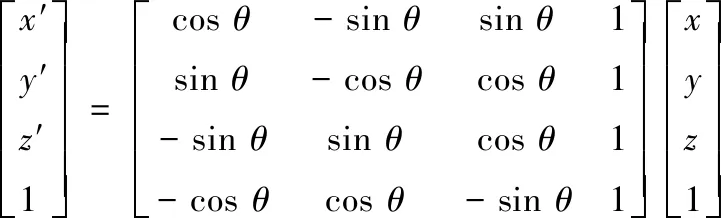
(3)
上述旋转矩阵对于所有直线的旋转都适用[6]。经过处理后,采集到的点云信息都能够被深度学习算法所识别,为目标定位提供更高质量的数据。
3 深度学习算法优化
3.1 深度学习网络模型构建及定位过程分析
在众多深度学习算法中,选用卷积神经网络对点云数据进行分析,提取目标位置特征,实现快速、精准定位。
3.1.1 卷积神经网络结构
CNN网络是在人工神经网络基础上生成的,属于一种处理数据的网络结构[7],具体结构组成如下:
1)卷积层
卷积运算是利用滑动窗口方式实现的,可提取数据特征,输出形式通常如下:
(4)
式中,zi,j和xi,j分别为网络输出和输入,Pi,j是不同大小的卷积核,i和j代表不同点云数据。
输出值通常受到卷积核大小、采样步数等影响[8],为减少填充信息对初始数据的干扰,选择填充“0”方法。则输出的点云图像表达式如下:

(5)
式中,Hout与Hin代表输入和输出图像的高,Wout和Win则为输入、输出图像的宽,S属于步长,Ph和Pw描述水平与垂直方向上的填充宽度,kh和kw代表卷积核高与宽。
填充宽度Pw和Ph的计算公式如下:
(6)
2)池化层
池化层的计算也是依靠滑动窗口完成的,具体作用是减少参数种类,避免网络过于拟合[9]。在特征提取过程中,池化操作能够有效防止背景特征进入到下层网络,提高图像特征的不变性。
3)全连接层
该网络层能够起到降维与信息表达的作用,可以将学习到的特征传输到标签空间[10]。单个全连接层并不能很好解决非线性问题,所以网络层数通常大于两层。
3.1.2 三维无源目标定位
利用上述构建的CNN模型完成数据训练和定位,将处理好的图像输入到网络中,通过网络判断图像中是否包含目标,确定边界框位置。具体过程如下:
将图像划分为s×s的网格,所有网格都会估计出各边界框和其对应的置信度[11]。任意边界框中都存在五个预测值:X′,Y′,w,h,si。其中,(X′,Y′)是边框中心和网格中心的距离,w,h描述边框宽和高,si为置信度评分,其计算公式如下:

(7)
3.2 三维无源目标定位优化
3.2.1 卷积神经网络结构优化
上述方法虽然能够确定目标边框的位置,但是因点云数据存在一定稀疏性,卷积神经网络针对稀疏数据会出现处理速度过慢的问题[12]。为此,本文在此基础上提出稀疏卷积并行算法。引入检测器网络提高原始网络的运算速度,即使在数据稀疏情况下,也能很好提取目标的位置特征[13]。

(8)
式中,Wu,v代表检测器获得的坐标结果。


(9)
式中,Ru,v为匹配矩阵,在已知该矩阵的情况下,通过Ru,v来获取检测器空间内的中间矩阵,再利用矩阵乘法去除矩阵中的零值,提高计算效率。
3.2.2 边界框约束
在没有约束条件时,网络的训练会不稳定。为了提高边界框预测精度,设置如下约束条件[14]:
(10)
式中,cX′和cY′是网格左上角的坐标值,(tX′,tY′)代表预测边界框上的坐标。t0与置信度作用相似,能够提高网络结构的稳定性,σ为激活函数,(pw,ph)描述锚点宽高。
3.2.3 损失函数设置
通过设置损失函数,可实现网络端与端之间的训练效果,提高位置特征提取能力[15]。损失函数包括如下三部分:
loss=Ecoord+EIOU+Eclass
(11)
式中,Ecoord和EIOU分别为边框位置和置信度误差,Eclass是定位误差。三种误差计算公式分别如下:

(12)

(13)

(14)

此外,针对边界框的宽度与高度误差,添加比例因子α,计算公式为:

(15)
针对小的目标而言,结合该比例因子能够更好的调整置信误差,提高三维无源目标定位精度。
4 实验过程与结果分析
实验中选用Velodyne-HDL-64E型号的激光雷达,该雷达具有64个发射器与接收器,是当前世界上较为先进的雷达设备。所有激光器都设置在相同的垂直角度,在不断旋转下获得高密度点云数据,可保证数据的实时性与密度。激光雷达的性能参数如表1所示。
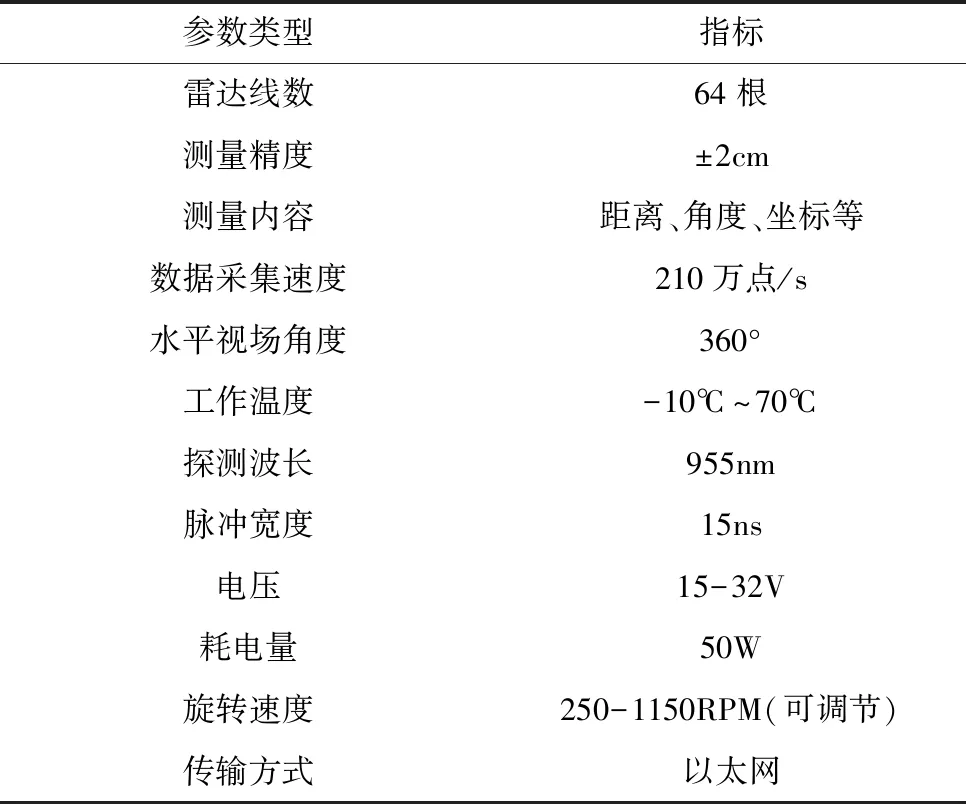
表1 激光雷达性能参数表
对于激光雷达传感器的部署如下:
1)有障碍物情况下算法定位性能分析
精度是体现定位算法性能最关键的指标,在上述实验环境下,利用本文方法、联合概率数据关联和位置代数解算法进行对比,不同算法的定位效果如图2所示。

图2 不同算法定位精度效果图
针对图2显示的测试结果,利用交并比指标来衡量不同算法的定位具体精度。该指标表示实际目标位置和定位结果之间的交集合并集之比,可以计算出二者重合程度,计算公式表示为:

(16)
式中,area(pred)和area(gt)分别代表实际区域和定位区域。并设定阈值为0.5,如果计算结果高于阈值,则说明目标定位效果较好,反之不能准确识别目标位置,该值越大,定位精度越高。
经过计算,交并比的平均值为:本文方法为0.92,联合概率数据关联算法为0.64,位置代数解算法为0.79。根据计算结果和图2可知,本文的定位精度最高,其它两种方法虽然能够满足定位精度要求,虽然在障碍物影响下,数据变得稀疏,会造成定位误差,但是优化后的稀疏卷积并行算法有效解决了这一问题。
2)点云密度不同时算法定位性能分析
假设区域中不存在障碍物,各方法均不受障碍物的影响,在每次定位过程中改变点云密度。此种情况下不同方法的定位效果如图3所示。

图3 点云密度不同时算法定位误差测试图
由图3可知,本文方法并没受到点云密度影响,误差始终保持平稳状态,而其它两种方法的误差曲线走势大致相同,当点云密度较小时,定位误差较大。这说明本文方法即使在数据量较少时,也能准确提取目标的位置特征,证明了优化后的算法特征提取能力更强。
3)算法收敛性能分析
算法收敛性能也体现着定位执行速度,通过损失值判断收敛速度,则三种方法的收敛性能测试结果见图4。

图4 不同算法收敛性能测试结果图
观察图4可以发现,本文方法在4s时损失值已经趋于平稳状态,位置代数解算法在8s后才逐渐平稳。此外,所提方法在收敛时能够保证损失值最低,说明优化后的卷积神经网络不仅具备超快的数据处理性能,还有较强的学习能力。
5 结论
本文面向三维无源目标定位问题,对深度学习算法进行优化。构建卷积神经网络模型,确定网络结构,分析定位过程,设置损失函数;为改善该网络模型必须依赖高密度数据问题,提出改进稀疏卷积并行算法,使网络在稀疏数据下也能具备较强的学习能力,提高定位速度和精度。实验结果也验证了该方法的定位误差较小,收敛速度较快。但在大数据时代,信息种类丰富较为关键,尤其在定位技术中,只通过激光传感器采集数据未免单一,今后研究中应引入更多的无线传感器设备,扩大数据集规模,进一步提高定位准确性。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年19期)2019-11-23
电子制作(2019年12期)2019-07-16
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年6期)2017-11-23
互联网天地(2016年2期)2016-05-04
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
电测与仪表(2015年13期)2015-04-09