
基于改进粒子群算法的结构测点优化方法研究
2023-09-21 03:52刘宏林徐一鸣刘宏月
机械设计与制造 2023年9期
刘宏林,徐一鸣,刘宏月,陆 观
(1.南通大学机械工程学院,江苏 南通 226019;2.南通大学电气工程学院,江苏 南通 226019;3.上海大学机电工程及自动化学院,上海 200072)
1 引言
工字型梁能在节省材料的同时获得接近于外轮廓长度一样的矩形截面的惯性矩以抗弯;梁的腹板和宽度大致相同,可以承受较大的载荷;梁在平行和垂直腹板的方向上可以平衡外力,因此在工程领域应用广泛,对其进行受力状态识别具有重要的意义。受力状态识别方法主要有应变法、压力法、加速度法、频域法和时域法[1]。利用应变传感器进行应力应变测量是检测工程结构安全性的常用手段之一,应变法的基本原理是:在结构典型剖面安装应变传感器,然后进行校准实验,通过校准载荷和应变传感器响应数据间的对应关系,利用线性回归建立载荷方程,最后把实际运行中的应变传感器响应数据带入载荷方程从而得到实际载荷。在测量过程中,测点的选择作为关键环节,直接影响着受力状态测量的精度。
测点的选择作为受力状态测量中极其重要的一个环节,特别是对于多种受力状态识别问题,如轴力、剪力、弯矩、扭转等,如何利用较少的传感器得到较优的识别结果在整个受力状态测量过程中显得至关重要。传统的测点选择通常是选择线性好、迟滞性小、敏感性高、单一性好且没有冗余的测点[2]。但这种选择方式需要对结构受力熟悉且具有较丰富的工程经验,随着机械结构的日益复杂以及测量要求的提高,用此方法就较为繁琐,因此出现了基于穷举法,T值法、速降法等测点选择方法。在工字梁的中截面沿高度方向等距粘贴5个应变片,在梁底和梁顶各贴1个应变片对工字型梁进行静力加载检测[3];利用工程经验在翼梁的4个剖面放置测点挑选响应曲线好的测点建立载荷识别方程,根据飞行数据对方程的准确性进行验证,识别机翼所受的弯矩,扭转以及剪力[4];通过穷举法将测点逐个的引入,对已选入的测点逐个进行显著性检验,将检验不显著的测点剔除,从而得到最优的测点组合,从而得到精度高的回归方程识别起落架的航向载荷,垂向载荷和侧向载荷[5];利用穷举法对主起落架上在轮轴、活塞杆、外筒等部位布置的11个测点进行筛选,选取最佳的测点组成载荷方程识别飞机起落架所受的惯性回弹力和轮胎与地面间的作用力[6];利用T值法进行应变测点的选择,选取最佳载荷方程识别机翼根部受到的弯矩以及扭转[7]。但这些方法只是机械式的剔除测点,并未综合考虑测点数目、位置、组合以及误差之间的关系。
因此针对工字梁结构受力状态识别提出一种带有模拟退火思想的遗传与粒子群混合优化算法用于测点选择,通过误差检验测点位置与误差间的关系,找到较优测点组合,为受力状态识别过程提供一种测点优化的方法依据。
2 改进粒子群选点方法
由于传统选点方法像穷举法和速降法等只是单纯的考虑测点数目,缺乏一种统筹测点数目与载荷方程误差的思想,并且一旦测点数目发生改变以上两种方法的程序都需要手动调节,因此,需要研究一种综合考虑测点数目与多种受力状态识别误差关系的优化方法进行多种受力状态识别。提出一种带有模拟退火思想的遗传与粒子群混合算法,这种算法克服了粒子群算法易陷入局部最小的缺点,并综合考虑了测点数目与受力状态识别误差两种因素进行测点的筛选。
2.1 标准粒子群算法
标准粒子群算法流程图,如图1所示。粒子群算法将需要解决的问题的每个可能的解作为一个“粒子”,将“粒子”按照需求解的个数组成“粒子群”。每一个粒子拥有两个特征,分别为速度特征和位置特征[8-9]。即在D维搜索范围内,用Xi来表示第i个粒子的位置特征,用Vi来表示第i个粒子的速度特征,用该粒子的适应度值为粒子的位置坐标信息对应的目标函数值。该算法根据不同粒子的适应度来判断不同粒子的好坏,通过不断的迭代更新粒子的位置和速度,一直到迭代能够寻找到最优解。第i个粒子从第k代进化到第k+1代,根据式(1)、式(2)更新粒子的速度和位置:
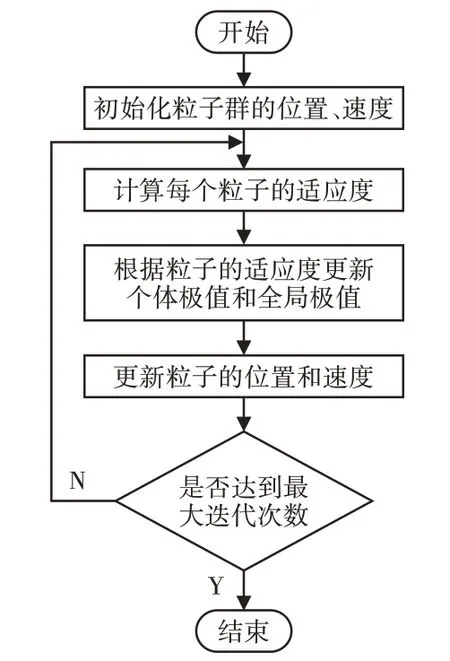
图1 标准粒子群算法流程图Fig.1 Flow Chart of Standard Particle Swarm Optimization

图2 改进粒子群算法流程图Fig.2 Flow Chart of Improved Particle Swarm Optimization
式中:ω—惯性权重,惯性权重的大小决定了对粒子当前速度继承的多少,控制粒子的探索和开发能力;c1、c2—加速因子,作用是控制粒子向历史最优点以及群体内或邻域内历史最优点靠近;rand—在[0,1]随机产生的随机数。
2.2 改进粒子群算法
标准粒子群算法拥有模式简单、系统运算快的好处。但是在算法运行寻找最优解时,当某个粒子搜索到当前的一个最优位置时,其余粒子会立即向该位置靠近。一旦出现当前发现最优位置为算法的局部最优点这种现象时,算法便会出现易陷入局部最优,早熟收敛的问题。因此,将遗传算法与模拟退火思想引入粒子群算法中,改善粒子群算法易陷入局部最优、易早熟的问题。
2.2.1 遗传算法步骤
遗传算法是基于大自然中生物体进化规律而设计提出的。该算法是模拟达尔文生物进化论的自然选择和遗传学机理的生物进化过程的计算模型,是一种通过模拟自然进化过程搜索最优解的方法。选择、交叉及变异是遗传算法的最基本的三个遗传算子。由于标准粒子群算法没有选择、交叉和变异,所以在改进粒子群算法中引入这三种操作,从而增强算法摆脱局部最优的能力。
(1)选择
传统的遗传算法的选择是为了从旧群体中选择“生命力强”的个体,并将其遗传到下一代的过程,该过程一般采用轮盘赌法。采用一种改进的轮盘赌法,在传统的轮盘赌法基础上用适应度函数最值减去该种群中每个粒子对应的适应度函数值,这样适应度函数最值即最劣等的个体被遗传下去的概率为0,提升了算法收敛性。根据适应度函数的定义,当前种群中适应度的向量Ft,t代表当前种群代数,对Ft进行处理:
式中:Ftmax—当前种群中适应度最大值,按照适应度比例法对处理后的粒子进行处理,则第i个粒子被筛选的概率为:
(2)交叉、变异
选择具有特定数量的粒子将其放进杂交池内,让杂交池中的粒子任意进行交叉操作,之后会生成相同数量的子代粒子(child),接着父代粒子(parent)用子代粒子来代替。父代粒子通过交叉得到子代粒子:
式中:p—(0~1)范围内随机生成的随机数。
遗传算法的变异操作是以一小概率选择粒子,并随机选择其一维或几维的信息,将值进行改变,改变的数值是搜索区域内的随机生成的数。选择、交叉以及变异操作是为了提高群体的多样性,有助于算法摆脱陷入局部最优的窘境,避免算法出现“早熟”现象。
2.2.2 模拟退火思想步骤
参考模拟退火算法在搜索最优解过程中拥有概率突跳的优势,该算法不仅能够接受好解,而且以一定的概率接受劣解,同时温度参数能够对该概率进行控制[10-11]。因此在杂交操作中添入模拟退火的思想,提高粒子群算法摆脱局部最佳值的能力和提高搜索精度的能力。
(1)计算初始化群体,计算它们的适应度值f;计算初始温度T0:
式中:fmax、fmin—最大和最小的适应度值。
(2)计算交叉变异后的粒子对应的适应度的值f';将交叉变异后的适应度值与对应的上一代粒子适应度值做差,即:
(3)若dE(i)>0,则接受变异后的粒子,若dE(i)<0,则依概率p接受变异的粒子:
式中:μ—降温系数,对温度下降速率进行控制。
上面操作过程的优点:一是使收敛速度得到提高,在迭代的最后使得优解接受变异的概率越低;二是能够让算法跳出局部最优,帮助其摆脱陷入局部最小点的困境。
2.3 改进粒子群算法步骤
(1)初始化粒子的位置和速度,计算每个粒子的适应度值,将各个粒子的位置信息和适应度值保存在各粒子的个体极值中,将所有个体极值中适应度值最优的个体位置信息和适应度值保存在群体极值中;
(2)按照式(6)计算初始温度T0,根据式(1)、式(2)对每个粒子的速度和位置信息进行更新,并按照式(3)、式(4)对粒子群体进行选择操作,然后进行交叉、变异;
(3)按照式(7)、式(8)选择接受的子代粒子以及保留的父代粒子,对每个粒子的个体极值以及群体的群体极值进行更新;
(4)若达到精度要求或迭代次数的结束条件,停止搜索,输出最终结果;否则按照式(9)进行降温操作后,再进行(2)。
3 测点选择方法对比及仿真实验
3.1 算法性能比较
对于算法的性能检验,主要检验算法的寻优能力与收敛速度,通常通过特定的函数就可检验[12],利用2个典型函数优化问题来检验提出的改进粒子群算法的性能,其中Sphere函数检测该算法收敛快慢,Rastrigin 函数检测全局搜索能力。
测试函数1,Sphere 函数:
其中,-100<xi<100,最优状态及最优值为:minf(x*)=f(0,0,…,0)=0;
测试函数2,Rastrigin 函数:
其中,-100<xi<100,最优状态和最优值为:minf(x*)=f(0,0,…,0)=0;该多峰函数的特点是具有许多局部极值点,全局最优值不易寻找到。两种算法平均优化结果,如表1所示。

表1 两种算法平均优化结果Tab.1 Average Optimization Results of Two Algorithms
对每个测试函数,分别采用标准粒子群算法和这里提出的算法进行测试。两种算法基本的参数设定均为:种群数目N为40;函数维度D设定为10;加速因子c1=c2=1.4;惯性权重ω=0.65;最大迭代次数为500。各算法运行50遍,并求出50组数据的平均值Avg,以及50组数据的最小值(最优值)best。标准粒子群算法和改进的粒子群算法函数运算结果,如表1 所示。Sphere 函数及Rastrgin函数优化曲线,如图3、图4所示。
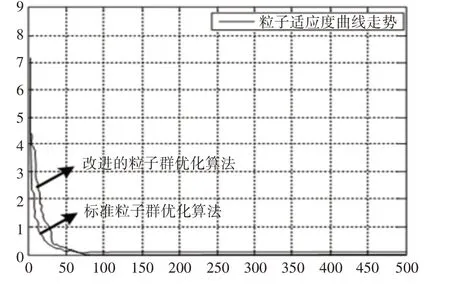
图3 Sphere函数的寻优曲线图Fig.3 Optimization Curve Graph of Sphere Functions

图4 Rastrgin函数的寻优曲线图Fig.4 Optimization Curve Graph of Rastrgin Functions
通过表1可以看出,Sphere函数及Rastrgin函数得出平均最优值和最优值对比结果看,改进的粒子群优化算法在寻优效果比标准粒子群优化算法更好,能够得到更好的平均最优值和最优值。由图3、图4的寻优曲线图可以看出,改进粒子群算法的寻优曲线十分平滑,具有更好的效果和稳定性。
3.2 受力状态识别仿真实验
为了比较各个方法在选点问题上的优劣,利用仿真的数据,对各种方法的优劣进行分析,从而找出精度、运算效率较高的方案。选取一种工字梁结构作为复杂结构的简化模型,工字梁结构的三维图,如图5所示。
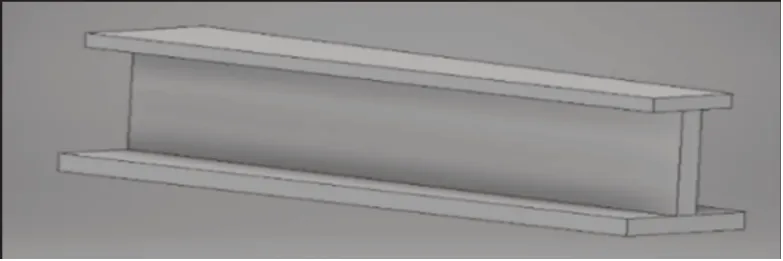
图5 结构三维图Fig.5 3-D Structural Map
长度为200mm,截面尺寸,如图6所示。在ANSYS有限元分析软件中对其进行静力学分析,为了使结构的应变表现的更明显,选用AL作为工字梁结构的材料参数,选取轴力作为受力状态识别的加载力,试件受力加载,如图7所示。根据ANSYS仿真结果,结构特性以及FBG应变传感有效区域,在工字梁表面,选择共60个节点,如图8所示。
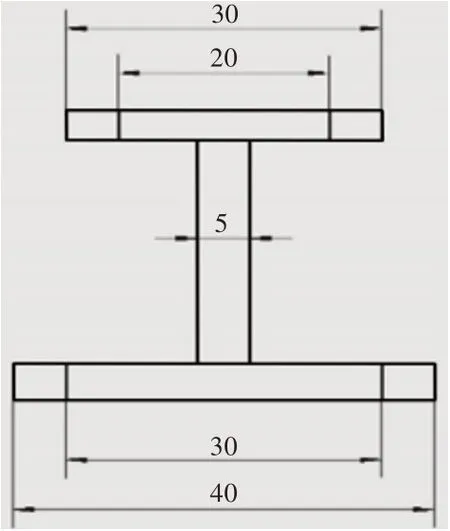
图6 截面尺寸图Fig.6 Section Dimension Diagram

图7 试件加载图Fig.7 Specimen Loading Diagram

图8 测点排布图Fig.8 Layout of Measuring Points
利用仿真的数据对图7中轴力的识别结果进行验证。目标测点数目为2和3时轴力经三种方法筛选的得到的结果,如表2~表3所示。对应表2、表3的结果对应测点在模型上的对应位置,如图9~图10所示。
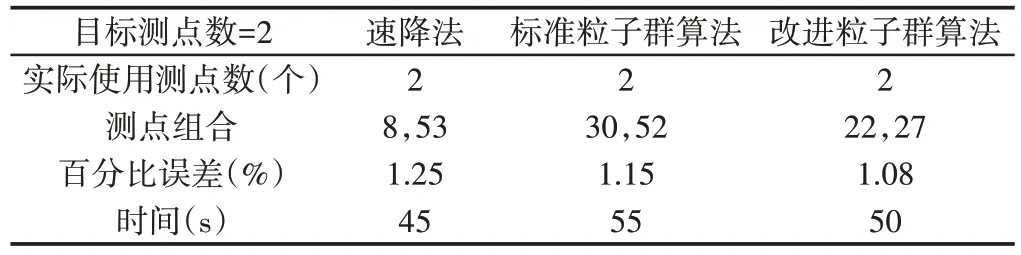
表2 轴力识别目标测点数为2时三种方法识别结果Tab.2 The Results of the Three Methods when the Number of Axial Force Detection Points is 2

表3 轴力识别目标测点数为3时三种方法识别结果Tab.3 The Results of the Three Methods when the Number of Axial Force Detection Points is 3
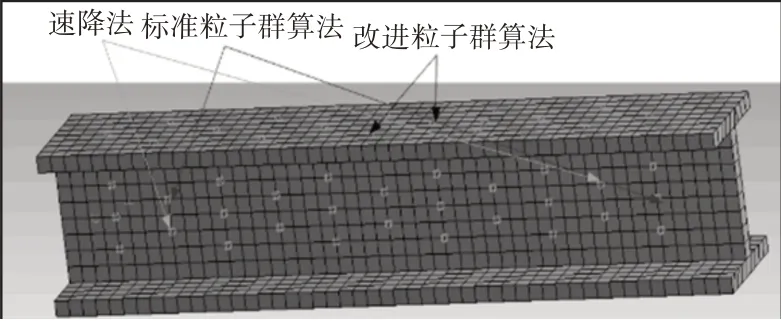
图9 三种方法两测点对应测点位置图Fig.9 Location Map of Two Measuring Points Corresponding to Three Methods
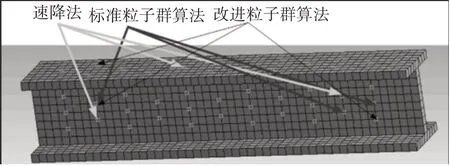
图10 三种方法三测点对应测点位置图Fig.10 Location Map of Three Measuring Points Corresponding to Three Methods
表2表示利用仿真的数据,选取目标测点数为2个时对图7中轴力的识别结果进行验证。速降法,标准粒子群算法和改进粒子群算法均能找到两个合适的测点组合,改进粒子群算法的受力状态识别百分比误差最小,标准粒子群算法的受力状态识别百分比误差其次,速降法的受力状态识别百分比误差最大,程序运行所需要的时间相差不多。
表3表示利用仿真的数据,选取目标测点数为3个时对图7中轴力的识别结果进行验证。速降法,标准粒子群算法和改进粒子群算法均能找到三个合适的测点组合,改进粒子群算法的受力状态识别百分比误差最小,标准粒子群算法的受力状态识别百分比误差其次,速降法的受力状态识别百分比误差最大,程序运行所需要的时间与测点数为2个相比改进粒子群算法的效率优势明显。依次得到目标测点数目(1~4)时三种方法的识别精度,如图11所示。
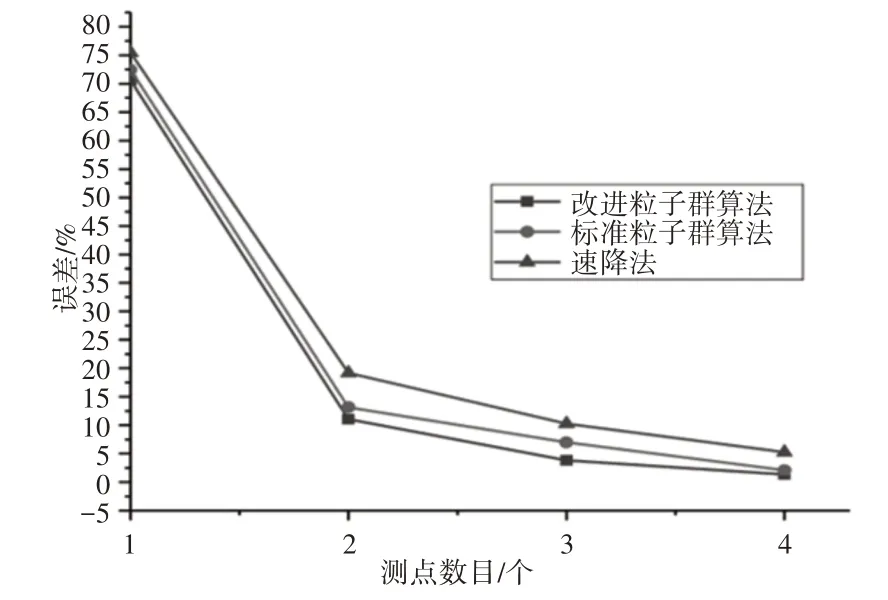
图11 三种方法受力状态识别误差比较Fig.11 Comparisons of Three Methods for Identifying Stress State
由上表和图11的结果可以看出,改进粒子群算法得到的结果百分比误差最小,其他方法得到的结果较之略大,均在可接受范围内。速降法假设最优n个测点组合方式必然存在于最佳的n+1个测点组合里,因此其精度略差,但是从筛选结果可以看出,其精度也在可以接受的范围内。改进粒子群算法其优点是不受测点数目限制,对任意个数的测点选择都具有相同的效率,在需要选择测点数目较多时,此方法的效率基本不受影响。
4 工字型梁试验
4.1 试验系统介绍
试验系统示意图,如图12所示。
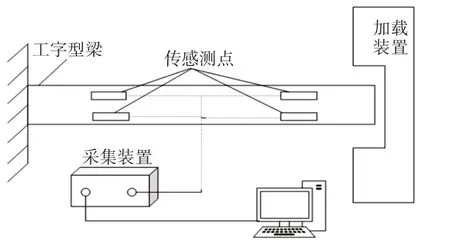
图12 试验系统示意图Fig.12 Schematic Diagram of Test System
4.1.1 工字型梁试验模型
试验模型截面高为50mm,上表面宽为10mm,厚2mm,下表面宽为15mm,厚2mm,腹板厚为2mm,如图13所示。弯矩采用拉压力机加载,扭矩采用扭力扳手与扭矩传感器组合的方式加载,如图14所示。

图13 工字型梁试件Fig.13 I-Beam Specimens
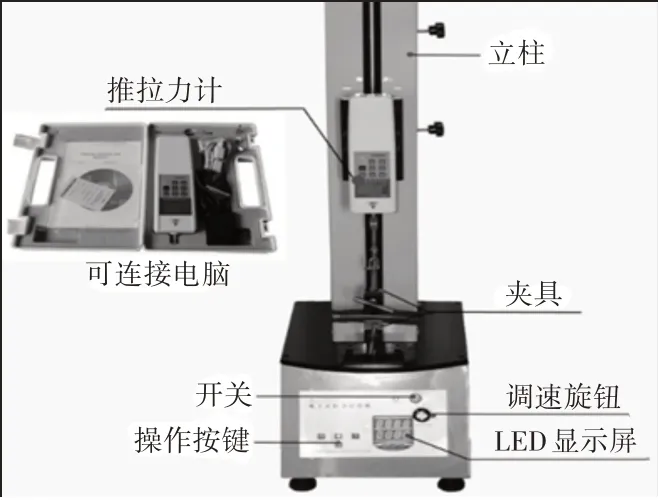
图14 加载设备Fig.14 Loading Device
4.1.2 硬件设备
光纤数据采集设备,如图15所示。

图15 光纤采集设备Fig.15 Optical Fiber Acquisition Equipment
4.1.3 贴片信息
光纤传感器贴片方式,如图16所示。光纤传感器贴片具体位置,如图17所示。上表面测点中心波长为1539nm,下表面测点中心波长为1548nm,腹板测点从左至右,从上到下中心波长分别为1542nm,1533nm,1554nm和1531nm。

图16 工字型梁贴片方式Fig.16 Patch Patterns of I-Shaped Beams
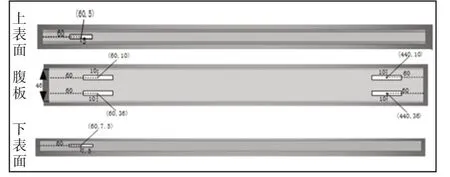
图17 工字型梁测点位置图Fig.17 I-Shaped Beam Location Map
4.1.4 加载方案
试验加载方案,如表4所示。
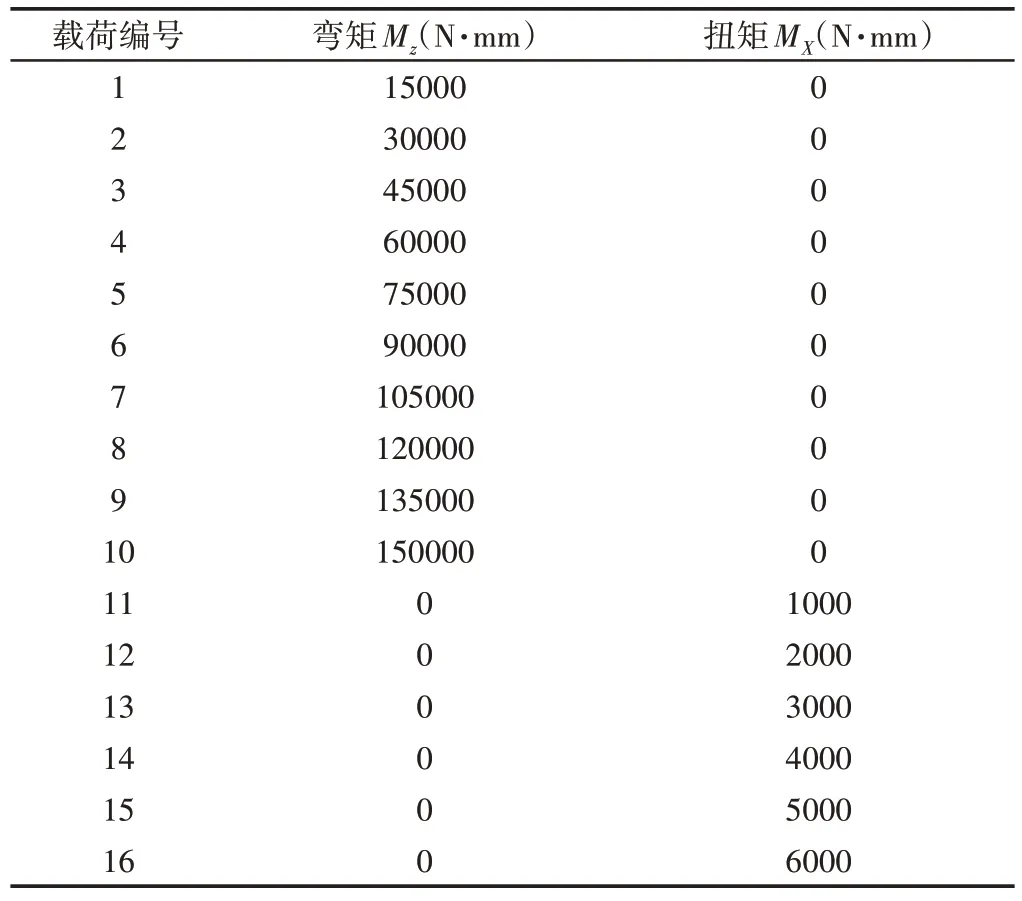
表4 试验加载方案Tab.4 Test Loading Scheme
4.2 试验数据处理
4.2.1 线性度分析
线性度是评估应变数据的好坏以及施加在试件上载荷是否在试件弹性限定区域内的重要标准。在传感采集数据的过程中,尤其是单向加载情况下,要求保证数据的线性度,且使测点处均匀受力。通过对工字型梁端面加载,得到各个测点应变变化随各个方向受力状态下的变化规律,如图18所示。各种单一受力状态施加图可以看出,弯矩加载时,六个测点的线性度较好,得出各测点传感器贴片质量较好,且测点位置受力均匀,没有出现应力集中的现象。在扭矩加载作用下,应变测点的线性度比弯矩加载作用下稍差,排除贴片问题,说明在扭矩实际加载过程中,扭矩扳手与试件夹具在配合上存在偏移。
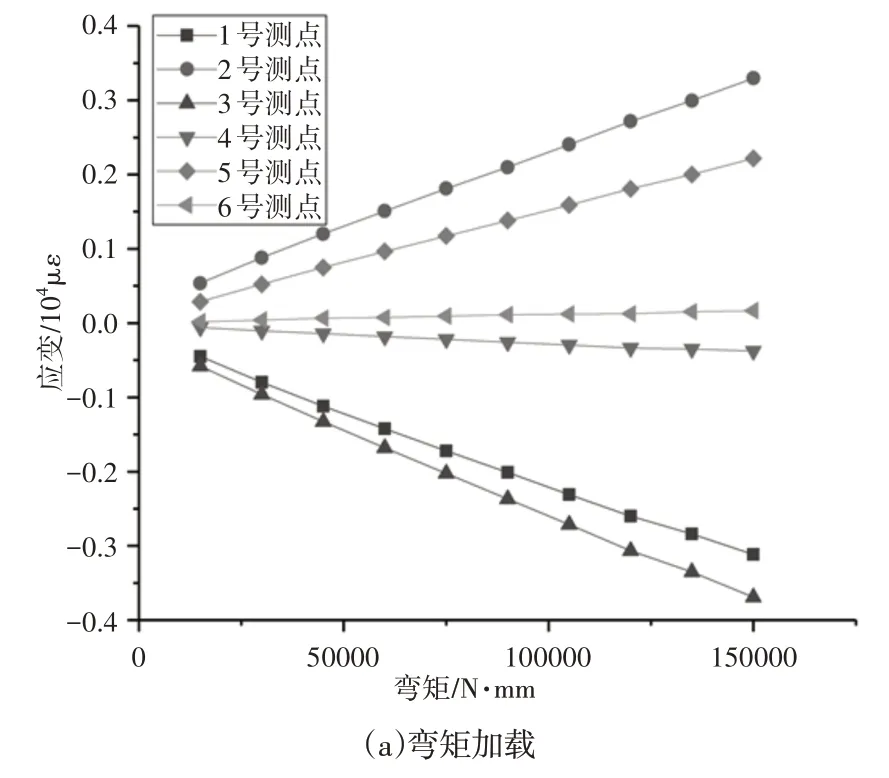
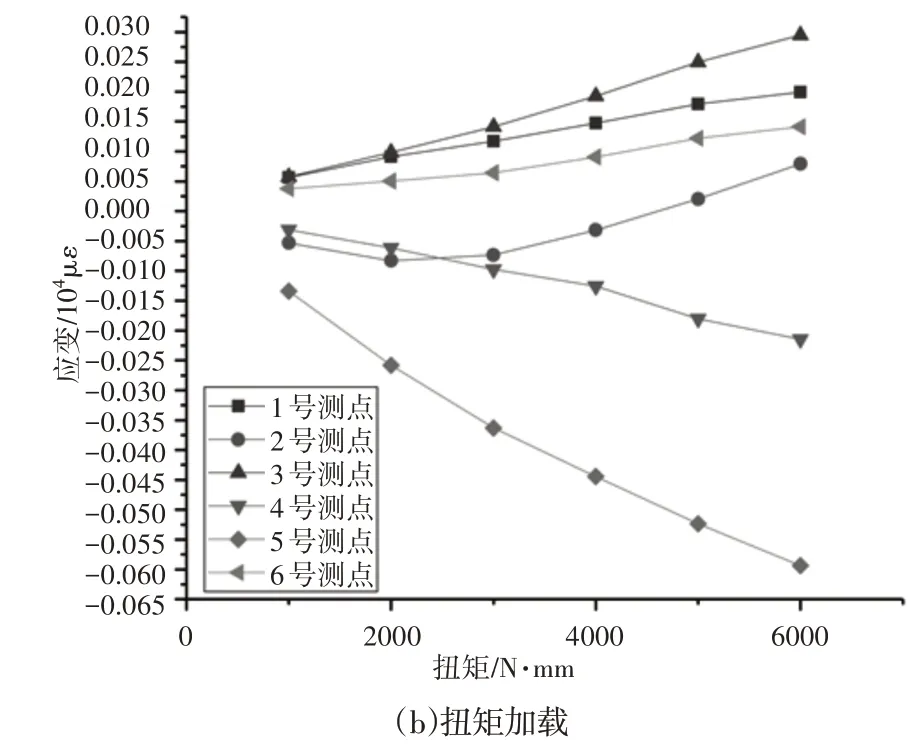
图18 单向加载线性度Fig.18 Unidirectional Loading Linearity
4.2.2 与数值模拟比较
通过对仿真模拟和试验数据进行了对比,验证了仿真模拟及实际加工件之间的误差。由于扭矩加载的偏移问题,只对弯矩的加载与模拟数据进行对比。
通过用回归方法得出各个测点应变和弯矩的变化规律,得出单位弯矩作用下的应变大小之后对数值模型施加相同的单位弯矩,将试验结果和数值仿真得到的应变结果进行比较,如图19所示。

图19 数值模拟与试验应变大小对比Fig.19 Comparison of Numerical Simulation and Test Strain Size
从对比图能够得出,六个测点位置的应变大小与模拟结果很靠近,故模型的加工上误差不大,能够用作验证性试验。
由上述线性度分析可得,理论数值与试验数据的对比结果既证明了测试仪器和应变测点的正确性,又验证了模型的可行性。
4.3 弯矩的识别
对工字型梁进行加载,分别加载表4中1-10号载荷,如图20所示。

图20 工字型梁的弯矩加载图Fig.20 Moment Loading Diagram of I-Beam
利用加载数据对受力状态识别方程进行求解,并选取部分载荷作为校验载荷对测点进行组合,得到应变测点个数为2、3时的识别结果,如表5所示。

表5 弯矩识别测点组合结果Tab.5 Combination Results of Moment Identification Measurement Points
5 结论
(1)针对机械结构多种受力的情况,提出一种基于模拟退火与遗传算法的改进粒子群算法用于测点选择,通过误差检验测点位置、数目与误差间的关系,找到较优测点组合,为运行过程中多种受力状态识别过程提供一种测点优化的方法依据。
(2)这里的改进粒子群算法将模拟退火算法的退火思想和遗传算法中的选择、交叉、变异方法运用其中。从算法性能检验可以看出,改进粒子群算法寻找的最小值比标准粒子群算法的最小值小得多,而且改进粒子群算法比标准粒子群算法更早的趋于稳定。因此改进粒子群算法避免了原算法陷入局部最优的缺点,也极大的提高了算法的全局搜索能力。
(3)对比改进粒子群算法和标准粒子群算法在测点优化实验结果表明,改进算法比标准粒子群算法的精度高且用时较短;改进粒子群算法在测点选择上与传统测点择方法相比,精度略有偏差但差别很小,介于穷举法和速降法之间,但是在效率上有很大的提升,改善了传统测点优化方法中仅考虑受力状态识别误差及机械式调节测点数目的缺陷。
(4)根据理论仿真结果,加工工字型梁试件,搭建进行弯矩和扭矩加载试验;将试验与仿真结果进行比较,发现FBG传感器具有很好的线性度,由于加载装置的偏移导致试验数据与理论数据存在细微的差异,但基本保持一定的线性度;利用试验的数据验证线性回归方法和改进粒子群算法,根据不同的受力状态形式得出不同的受力状态识别。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
工程与建设(2019年4期)2019-10-10
中学生数理化·八年级物理人教版(2018年5期)2018-06-21
江西建材(2018年1期)2018-04-04
广西科技大学学报(2016年1期)2016-06-22
中国塑料(2016年11期)2016-04-16
工程建设与设计(2016年8期)2016-03-11
中学生数理化·高一版(2016年10期)2016-03-01
石油化工建设(2015年2期)2015-12-01
火炸药学报(2014年3期)2014-03-20
