基于超声相控阵的聚乙烯管道缺陷信号重构方法研究
2023-09-27 08:23吴胜平王海涛俞燕萍
计算机测量与控制 2023年9期
郑 凯,吴 军,吴胜平,范 正,王海涛,许 倩,俞燕萍
(1.江苏省特种设备安全监督检验研究院,南京 210036;2.南京航空航天大学 自动化学院,南京 210016)
0 引言
当今社会,由于工程需要,在城市给水、输气等领域大量应用到了聚乙烯管道。由于其设计寿命理想、抗腐蚀效果好、焊接连接可靠、不易折断开裂、管网铺设效率高、价格便宜等具备诸多优势,聚乙烯管道的使用量逐年增多,曾经广泛使用的钢制管道也将为其让步。聚乙烯管道的制作工艺与设备与金属管道存在较大的差异,可能存在的缺陷性质等和金属管道的也有所不同,所以用超声波探伤和在探伤金属管道时所要解决的问题也不尽相同。相对而言,对聚乙烯管道的超声波探伤的难度要比金属管道的要大一些,缺陷表征极不明显。并且在聚乙烯材料中的声速比金属中的声速要小得多,检测信噪比也极低。另外,考虑到聚乙烯材料的晶粒大,超声波散射噪声强,缺陷回波容易湮没在草状和林状杂波中,导致缺陷波的位置和波幅大小均难判定[1]。
目前,聚乙烯管道内部缺陷的检测普遍使用的是无损检测方法中的脉冲回波超声检测,该方法能够依据反射回的波形信号来判断隐藏在管道中的缺陷信息。由于检测得到的缺陷信号往往是非线性且不确定的,回波信号中含有检测需要的大量有效信号,但是它在聚乙烯等介质中传播时产生的衰减和杂波影响很大,从而使所需的有效信号变得极不明显。另一方面,在使用超声方法完成缺陷检测时,环境中不可避免的噪声会干扰微弱的回波信号,这一定程度地影响到检测精度。因此,在对缺陷信号进行分析前应当采用较好的信号处理方法抑制噪声而突出有效信息。
根据定义,使用少量基本信号的线性组合表示某一目标信号,称为信号的稀疏表示,而用低维的采样数据向量回复或重构 Nyquist 速率采样的高维数据向量,称为压缩感知。通俗地说,稀疏表示是将一个复杂的数据简单化,而压缩感知是要从一个简单化的数据表示中得到复杂的原始数据,这是两种相反的过程[2-3]。一方面,稀疏表示的过程可以起到一定的去噪效果;另一方面,压缩感知理论的运用,可以避免因重构大量数据而导致增加存储和计算的成本[4-5]。
为此,本文在进行聚乙烯管道的相控阵检测试验之后,首先采集模拟孔洞类缺陷的扇扫信号数据,然后从扇扫信号数据选取一根A扫信号数据,并提出以一种基于K-SVD字典学习算法的稀疏表示缺陷信号压缩重构方法对其进行数据恢复处理,接着对全部的A扫原始信号完成处理再进行整体的缺陷成像,最后同时通过调节字典元素个数和迭代次数,实现重构信号获得较高的信噪比和较低的重构误差,这有助于为缺陷回波信号特征提取的需求打好基础。本文旨在从不同角度改善缺陷信号的成像效果,同时实现在不丢失原始缺陷信号信息的基本情况下,减少信号处理时所需的数据量。
1 信号稀疏表示与压缩重构的基本理论
1.1 稀疏表示
压缩感知理论的运用需要能对这一信号进行稀疏表示,但在自然图像信号中,直接满足这一要求的情况很少。而要符合信号的稀疏性定义,那么该信号的采样点中幅值为零或接近零的占绝大多数,其他非零的幅值点只占很小且有限的一部分。于是有学者提出了新的方法,即在不丢失信号大部分信息的前提下,对其进行任意变换后使之能满足稀疏性定义,这时大多数自然图像信号就可以满足条件,其也被定义为可压缩信号。那么利用这一概念,就可以通过少量有限的基本特征信号的组合来完成某一目标信号的线性表达,这一过程也被认为是信号的一种稀疏表示:
(1)
公式(1)中,gr是用来表达信号的特征原子,cr是稀疏编码。
而稀疏表示之所以能够去噪,是因为普遍认为包含噪音的观测图像是由足够纯净的原始图像与部分噪声叠加而成的,另外,观测图像被认为满足稀疏性定义,也即可以通过少量有限的特征信号来表示;相反,噪声是随机或不满足稀疏性定义的,也就意味着其不能由少量有限的特征信号稀疏表出,因此基于观测图像提取稀疏基上的系数向量,再利用这些系数向量来完成最后的信号重构,在进行这一步处理时,噪声会被视为观测图像与重构图像之间的残差而被舍去,也就是说,稀疏表示还是最终通过完整的压缩感知流程实现了去噪效果[6]。
稀疏表示也是一种编码方式,其过程可以被视为在提取信号关键信息,如果是把目标信号投影到一组非正交的基构成的空间中,而在每个基上投影的系数,就是稀疏编码。这组非正交的基向量中,每一个基向量被称为一个元素,这些元素(列向量)则可以构成一个超完备的字典[7]。
1.2 压缩重构
传统压缩方法会被Nyquist采样定理约束,在特定情况下恢复的保持效果不佳,同时巨量的采集数据会影响其传输的效率。Donoho和Candes等提出了压缩感知(CS:compressed sensing)理论与稀疏表示方法结合,同时进行压缩与采样操作,在信号满足可压缩的情况下,只需要通过采集少量信号样本,再依据稀疏性约束方法,就可以实现对信号有较好的恢复效果,并能在某种意义上避免受到采样定理的影响,该方法对研究缺陷回波信号等信息含量较大的压缩重构与与信号处理具有深远意义[8]。
在重构算法的改进上,分块压缩感知(block compressed sensing,BCS)方法首先被提出,进一步减少了数据处理量。随后BCS-SPL(smooth projected landweber)的产生,继续完善了重构效果。基于K-SVD(k-singular value decomposition)超完备字典学习的图像稀疏表示方法的提出,意味着该种算法能根据图像自身特性,自适应调整和变换基函数,故而该信号处理方法在这一领域很快被推广和使用[9]。
2 K-SVD算法的实现步骤
K-SVD是以上所述稀疏表示中通过字典学习构造对应字典的算法,因为该算法需要数次迭代才能实现,且每一次迭代都要使用SVD分解,所以才得以命名。如果针对给定原始样本矩阵每一列向量,都去求解字典D,那么获得字典的任意一列都可以称为一个元素,并且用Dk来表示,而K-SVD算法综合了K-means和SVD的思想,因此可以认为是K-means算法扩展和衍生版本[10]。
已知,D是训练好的过完备字典,依据稀疏编码,还可以求出稀疏向量x,重构算法主要是利用 这两者的乘积,以样本包含的数个元素来线性表示原图像,且x中不为0的数量很少,因此该表示是稀疏的。目前在各类超完备的字典学习方法中,K-SVD表现出优良的稀疏表示效果,在实际应用中具有其独特的优势。
K-SVD 算法主要分三步实现,首先是初始化设置。其中,初始字典的选择可以在下面两种方式中任选其一:一种是直接给出某个冗余字典(如DCT字典 )完成初始化流程;另一种是在采集的数据中随机选取部分元素构成字典内容。本文选择第二种方式。其次还需要进行稀疏编码,根据已知字典,利用信号重构算法(如正交匹配追踪算法)得到采集信号对应的最佳稀疏系数矩阵;最后应当对字典内容重复更新,即固定上述矩阵,按照迭代运算的要求,多次替换和覆盖新的字典,寻求最佳方案。在本文中,其具体算法步骤如下:
步骤1:确定重构的缺陷回波信号。
步骤2:设置初始字典内容中的元素个数K,K-SVD算法迭代次数N等参数。
步骤3:依据初始字典元素长度n,分割所选的缺陷回波信号,随机选取其中K个元素构成初始字典D并使其每个元素满足特定的设置条件。
步骤4:利用OMP算法获得缺陷回波信号初始字典下的稀疏系数矩阵X。
步骤5:固定以上的稀疏系数矩阵,利用SVD分解方法对每个字典元素进行替代,降低其逼近误差直至最小。
步骤6:重复以上两步流程,直到确定满足了预先设置好的迭代次数。
步骤7:获取当下的最优稀疏系数矩阵以及该矩阵对应的过完备字典。
3 聚乙烯管道缺陷相控阵检测试验
3.1 检测设备
本次实验采用的是仪器型号为ROBUST的超声相控阵板卡2020.6.5f30版本。它是一款由广州多浦乐电子科技股份有限公司自主设计、研发、生产的超声相控阵检测设备。它的主要功能需要由以下几部分来共同实现:包括探头编码器连接器、连接网线及路由器、计算机及上位机系统、DopplerBoard 检测软件等。此板卡的一般工作模式为一张板卡对应一台上位机系统;也支持多张板卡采集数据并联至一台上位机系统工作;以及一张板卡采集数据,多台上位机显示结果的工作模式。它可以实现64/128通道并行发射,32/64通道接受,最大可支持64/128晶片的相控阵探头,完成高速数据的并行实时采集与处理,采样率为100 MHz,增益范围为0~120 dB(模拟80 dB),最大A扫长度为8 192,支持聚焦法则数量为512个。
本次试验的探头采用了适合实际工程应用的小尺寸探头,选择的阵元数为32个,阵元中心间距是0.6 mm,阵元间隙为0.1 mm,探头中心频率为5 MHz,探头型号为DP2-5L-0.6×10-LEA003,另有其它频率和阵元数的探头作为备选的对比方案。由于考虑到现场的检测方便和数据采集的效率,本次实验暂不加装楔块,采用直接耦合方式。如图1所示为已选用和备选的探头型号。

图1 选用和备选探头型号
3.2 被检工件
由于聚乙烯管道的焊接工艺分为热熔焊、电熔焊和机械连接等,这使得声场路径相对复杂,增加了超声检测的难度。因此本文以型号为PE100、DN90、SDR11的聚乙烯管材制作了两块制备有平底孔缺陷的试样。其中一块设置有直径为3 mm,钻孔深度(从管壁内侧起)为约1~6 mm的平底孔各6个,两孔间等间距约3.2 mm,主要对此块试样进行检测工艺研究,并且钻平底孔时所使用的钻头精度可以达到0.5 mm。如图2所示为两块试样实物图,如图3所示为试样钻孔时选用的不同型号尺寸的钻头。
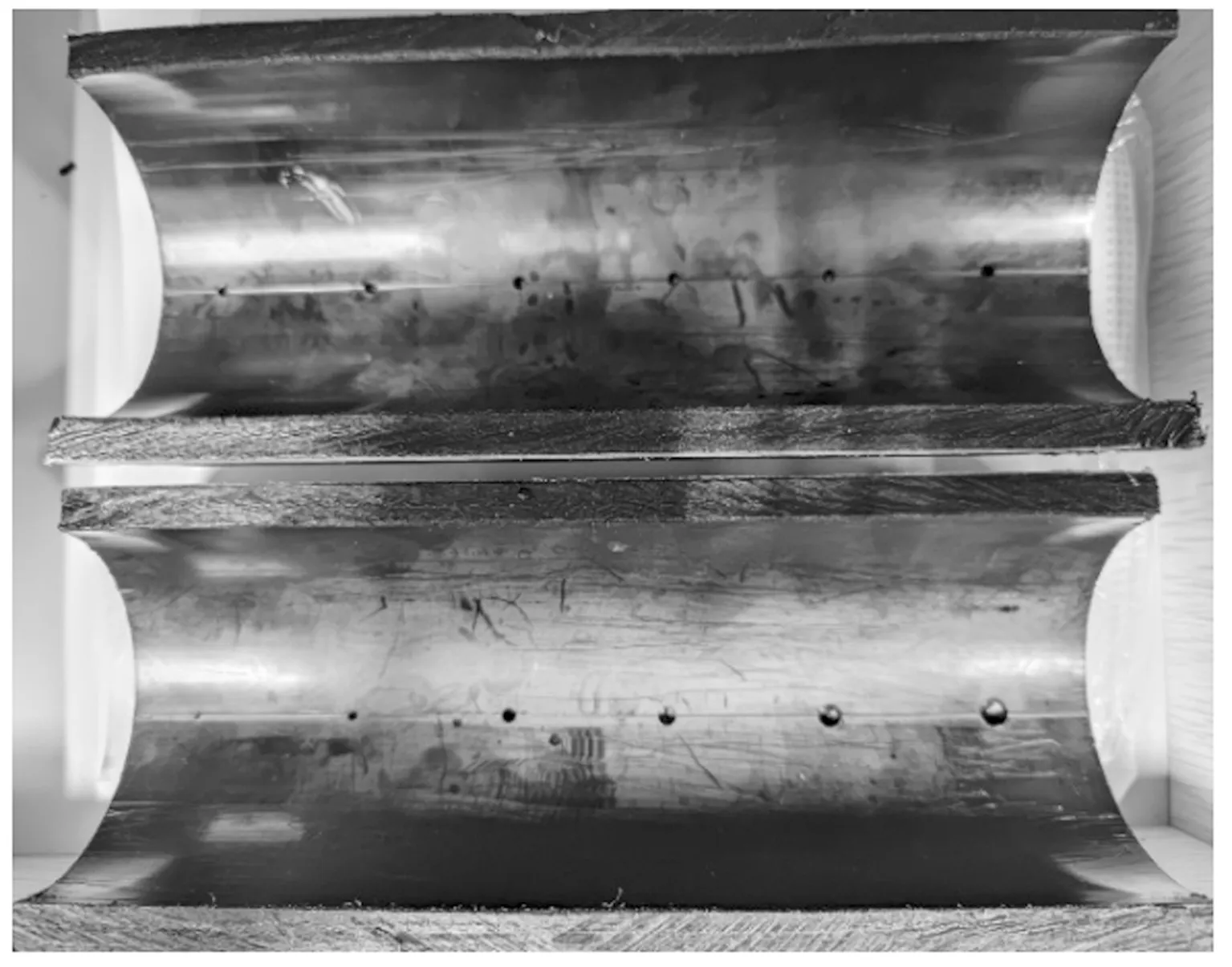
图2 聚乙烯管道缺陷试样示意图
3.3 检测结果
本次试验在检测聚乙烯管道缺陷时,只需利用一次波即可在试件中检测到1~6 mm深度的不同平底孔缺陷。并且由于DN90的聚乙烯管件壁厚大约在8.8 mm,所以本文选取了在各个缺陷的回波信号中幅值较高,缺陷特征较为明显的一个缺陷,其最高幅值处的真实深度在仪器上显示为3.6 mm(即钻孔深度约5 mm)。以这一平底孔缺陷作为本次压缩重构方法进行数据恢复的主要信号来源。检测试验完成后得到此缺陷的相控阵设备检测结果的扇扫描直出图像如图4所示,为了便于观察和采样,本次试验中选择的扇扫角度为-30°~30°,即该缺陷成像可以认为是一共由61条A扫信号组成。
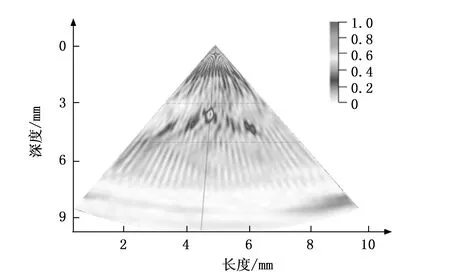
图4 超声相控阵仪器检测扇扫描直出图像
将以上超声相控阵设备采集的聚乙烯管道缺陷信号的每一条A扫描数据导入MATLAB中,并将其合成后重新成像的效果如图5(a)所示,对缺陷成像进行三维旋转后的效果如图5(b)所示。其中,深度纵轴与仪器直出的图像仍然保持一致,为了后续观察和处理方便,还将长度横轴调整为宽度范围从-5到5,并且取横轴中心作为零点,此时不难看出,聚乙烯管道的缺陷信号已经可以得到较为清晰的呈现,但对其成像效果的评估还需要进行进一步的详细分析。
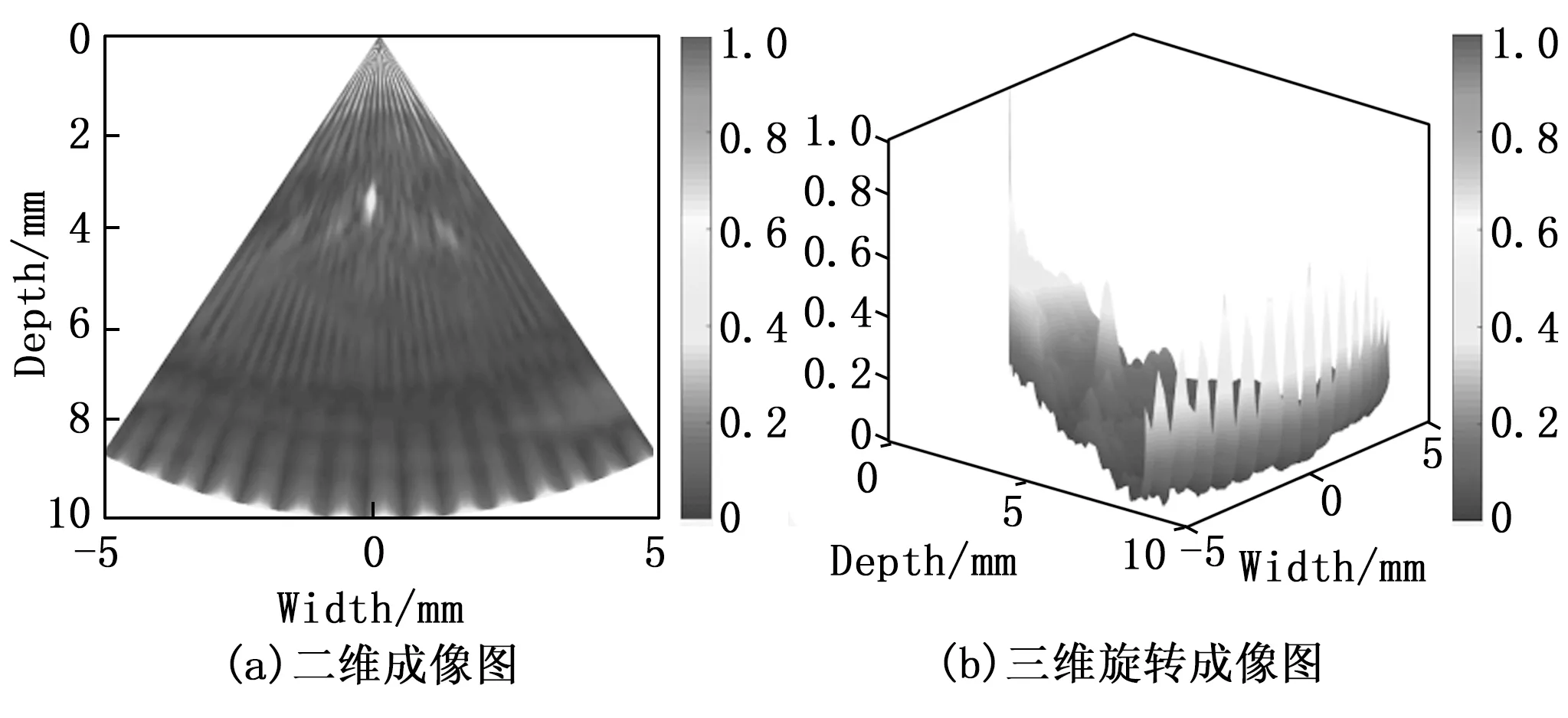
图5 缺陷信号数据采集后导入MATLAB的成像效果图
4 基于K-SVD算法的缺陷信号压缩重构研究
4.1 A扫信号的压缩重构
在本文中,聚乙烯管道的缺陷信号的稀疏性或可压缩性是压缩重构的重要前提和理论基础,信号越稀疏,则需要的压缩测量数越少且压缩重构的效果越精确。在进行A扫信号的压缩重构处理时,保持与原始图像一样选取了扇扫图像中缺陷信号幅值最高,缺陷特征最为明显的第28条A扫信号作为主要研究对象。根据算法步骤,首先确定字典元素K为50,算法迭代次数N为80。再将压缩重构后的信号进行归一化处理,即重构信号的最高幅值为1,可以得到此时的初始字典D如图6(a)所示,其中横轴对应此时的字典元素个数,纵轴对应字典元素的幅值。而重构前后的信号如图6(b)所示,其中横轴对应信号时间长度,纵轴对应信号幅值,蓝线为初始A扫信号,红线为压缩重构后的恢复信号,另外可以得到此时的信噪比SNR为48.807 5,OMP重构误差为0.004 0。由于在K-SVD字典学习算法中还采取了高斯随机矩阵作为观测矩阵,所以得到的初始字典D,重构信号及其信噪比SNR和OMP重构误差也都具备一定随机性。
4.2 扇扫成像的压缩重构
同时对这一缺陷扇扫图像的61条A扫信号完成以上基于K-SVD字典学习算法的稀疏表示信号压缩重构处理后,再通过MATLAB合成成像的程序处理就可以得到完整的扇扫图像如图7(a)所示,对其进行三维旋转后的效果如图7(b)所示。
这是一个全球各地品牌的“T型台”,人们在这里从素不相识到合作共赢,在这里走进中国,走向世界。这是一场品牌的合作、品牌的交融、品牌的盛宴,所有企业以产品、以理念、以技术、以创新会八方宾客,机会均等、繁荣共享。
普遍认为,在对信号重构效果的评价标准中,信噪比(SNR)表征的是噪声在信号中的强弱情况,一般被用来评价信号中的噪声水平,它的常用单位是分贝(dB)。
(2)
除此以外,对于评价重构一维信号或二维图像的去噪效果,还有一个关键的参变量,即均方误差,其定义为:
(3)
公式(3)中,f(n)为原始信号,f′(n)为处理后的估计信号。最后,峰值信噪比也是一种广泛用于评价二维图像处理性能的客观标准,主要衡量的是处理信号的最大可能值与背景噪声之间的差距。一般图像在经过压缩感知等算法处理之后,再次输出的新图像都会在原始图像上发生一定程度的改变,那么为了评价这一处理程序是否达到期望,处理后的图像品质是否存在严重失真,一般普遍都会参考PSNR值来作出判断。同时,它又与均方误差(MSE)密切相关,常用单位分贝(dB)与信噪比相同[11],它的计算公式如下:
(4)
对以上原始信号数据采集后的扇扫成像图5和完成压缩重构处理后的扇扫成像图7进行算法比较,可以求出在字典元素K为50,算法迭代次数N为80时,处理前后两图像之间的峰值信噪比(PSNR)为29.201 6。
4.3 影响信号压缩重构效果的因素分析
为了研究在K-SVD字典学习算法中,字典元素个数与算法迭代次数对聚乙烯管道的缺陷信号压缩重构效果的具体影响,本文仍然选择第28条A扫信号为研究对象,采用K-SVD 算法构造聚乙烯管道缺陷信号的过完备字典时,根据其主要涉及到的重要参数,从中选择并且分别控制字典元素个数K与算法迭代次数N保持不变,重复上述步骤分别计算出缺陷回波信号的信噪比SNR和OMP重构误差进行比对分析,并以此判断如何选择字典元素个数K与算法迭代次数N能够取得更好的压缩重构效果。
聚乙烯管道缺陷信号的稀疏表示,需要对K-SVD 学习算法中的参数进行有效的选择。尝试训练得到过完备字典,该字典在利用缺陷信号的本身特点的情况下,经过后续的试验验证,最终得出在该字典下,聚乙烯管道的缺陷信号可以获得较好的数据处理效果。随后,选取高斯随机矩阵为观测矩阵,该观测矩阵满足RIP性质,而缺陷信号重构选择正交匹配追踪重构算法(OMP),该算法是基于MP算法提出,也是贪婪算法中具有代表性的一种。相比于凸松弛法,其可以更加兼顾速度与整体性能,即在图像恢复中具备时间上的优势,同时关键信息也能够得以保留,即具有重构精度高,运行时间短等优点。
在本文算法中,重新选取字典元素K为30,算法迭代次数N为80,就能够得到此时的初始字典D如图8(a)所示,而重构前后的信号如图8(b)所示,并通过算法程序计算出此时的信噪比SNR为46.050 6,OMP重构误差为0.008 5。

图8 K=30,N=80时A扫信号的压缩重构效果图
那么如上所述,通过在保持算法迭代次数N为80不变时,改变字典元素K的值,重复以上操作,就可以得到缺陷回波信号的信噪比SNR和OMP重构误差的值,并且将其汇总统计后如表1所示,可以看出随着字典元素K的值的变化,其缺陷A扫信号的各项评价标准的数值也有了较为明显的浮动。
如果信噪比SNR越大,或者是OMP重构误差越小,则意味着缺陷回波信号的压缩重构效果越好,所以从表1中各项数据的变化趋势中不难得出,当字典元素个数K选择为50~60之间时,针对聚乙烯管道缺陷信号的K-SVD字典学习算法处理可以获得最好的压缩重构成像效果,而另一方面,当字典元素个数K超过70时,基于K-SVD算法的压缩重构效果则出现了较为明显的下降,也就不适合作为数据处理时的最佳选择。
同理,如果在保持字典元素K为55不变时,只改变K-SVD字典学习算法的迭代次数N,并且重复获取表1各项数据的流程,就还可以得到缺陷回波信号的信噪比SNR和OMP重构误差的值如表2所示。

表2 N=55时缺陷A扫信号的信噪比SNR和OMP重构误差
根据表2中的各项数据又可以看出,当字典元素K为55不变时,若迭代次数选择在80左右,即可获得最好的压缩重构成像效果,同时还要考虑到以高斯随机矩阵作为观测矩阵而产生的一定随机性,因此本文中对迭代次数的选择一般不宜超过90,也不宜低于50。
综上所述,根据对几次数据结果的统计和分析,在针对本次试验中的聚乙烯管道缺陷进行的基于K-SVD算法的稀疏表示信号压缩重构中,应当选择字典元素K为55,同时算法迭代次数N为80。这样可以获得最高的信噪比,此时SNR值为51.66,以及最低的OMP重构误差,数值为0.004,即在这一情况下能够取得相对最好的重构成像效果。如果字典元素K与算法迭代次数N朝该点的两侧变化,其衡量的标准均显示重构的效果在逐渐下降。
5 结束语
本文首先针对聚乙烯管道的特点,利用不同直径的钻头制作相应的缺陷试样,完成超声相控阵的检测试验,然后得到不同深度下缺陷的检测结果,采集缺陷的信号数据并且选择最合适的研究对象。在此基础上再通过仿真分析的方法利用K-SVD算法完成对某一单条缺陷信号的压缩重构,接着利用合成方法得到缺陷扇扫的完整成像。最后通过调节字典元素个数和迭代次数,实现重构信号获得较高的信噪比和较低的重构误差,并依据峰值信噪比等评价标准对其图像处理的质量作出较为准确的评价。并且在压缩感知的优化之后使得缺陷回波信号的测量效果更好,这将明显改善信号质量与成像效果,同时在不丢失原始缺陷信号信息的情况下,大大减少了缺陷信号的数据量,并能在一定程度上实现缺陷检出率的提高,降低漏检率。这也为以后将压缩感知技术进一步运用到聚乙烯管道的超声相控阵检测工艺的改进之中提供了借鉴意义。
猜你喜欢
家教世界(2023年28期)2023-11-14
家教世界(2023年25期)2023-10-09
北京航空航天大学学报(2019年9期)2019-10-26
电子测试(2018年11期)2018-06-26
电线电缆(2018年2期)2018-05-19
雷达学报(2017年3期)2018-01-19
创新作文(小学版)(2016年19期)2016-08-22
读者(2016年14期)2016-06-29
中国塑料(2015年9期)2015-10-14
西南石油大学学报(自然科学版)(2015年5期)2015-04-16