基于Buck-Boost变换器的无源性研究
2023-09-27 08:23程奔
计算机测量与控制 2023年9期
程 奔
(浙江工业大学 信息工程学院,杭州 310023)
0 引言
近年来,随着全球能源危机不断加剧,新能源发展开始备受瞩目。不少学者热衷于研究新能源直流微电网,直流微电网包含分布式电源系统与能量转换装置等部分[1]。其工作流程是将新能源通过DC-DC变换器给直流母线供电从而驱动负载运行,而负载侧包含两种类型的负载,一种是具有正阻抗特性的电阻负载;一种是具有负阻抗特性的恒功率负载(CPL,constant power load)。目前两者在直流微电网中的占比分别为20%~25%与75%~80%,恒功率负载具有的负阻抗性严重影响了系统的稳定[2],为得到高质量的电能,本文针对阻性负载大于恒功率负载时会引起系统振荡等问题进行系统的研究。对于直流微电网中各部分,本文的研究重点是DC-DC变换器,常见的控制算法分为线性控制算法与非线性控制算法。线性控制算法如PID控制、双闭环控制及前馈控制,目前线性控制较为成熟并广泛应用于工业系统中,线性控制思想是:在平衡点邻域附近,通过泰勒公式,忽略高阶项保留低阶项,将非线性系统转为线性化系统,利用直线代替曲线的方法近似得到系统的线性模型,最终得到线性控制器,一旦系统的运动范围变大时,系统的动态特性显著下降,为避免这一情况,非线性控制应运而生。常见的非线性控制算法有自适应控制、滑模变结构控制、自抗扰控制、无源控制[3]等,其中无源控制具有设计简单、静态误差小等特性被广泛研究。
无源控制(passive control):设计核心是通过能量整形与阻尼注入两部分使系统阻抗部分呈现正阻抗特性,即系统为正定。由严格正实引理(KYP,kalman-yakubovich-popov)[4]证明系统正定与无源性的关系,进而由局部不变定理[5]以及李雅普诺夫第二方法证明无源系统是稳定的。1989年R.Qrtega、M.Spong教授首次将无源性概念引入至电力电子器件中,通过无源性概念来研究变换器的稳定,之后几十年无源控制理论开始了蓬勃的发展。文献[6]将具有相同动态方程的端口受控哈密尔顿系统通过互联控制方法保持功率平衡,从而使得多个端口哈密顿(PH,port hamiltonian)系统同时镇定。与此同时此篇文献利用了闭环系统的能量函数与系统存储及耗散能相等的原理,提出能量平衡控制,进行无源控制器的设计,但这种方法需要控制器持续提供能量维持系统稳定,故控制器需要解决能量方面的问题。为了解决这个问题,文献[7]提出功率塑造的思想,解决了控制器提供能量有限的缺点,它是利用Brayton-Moser模型求解偏微分方程从而设计无源控制器,由于这种方法控制的是系统功率而非能量,解决了控制器提供能量有限的缺点。2008年R.Qrtega教授等学者在文献[8]中提出,相较于其他无源控制方法,互联和阻尼配置的无源控制(IDA-PBC,interconnection and damping assignment-passivity based control)方法使用效果最好,应用最广。IDA-PBC方法虽然使得系统具有较强的稳定性,但无法提高系统的鲁棒性。为了改变这一现状,在文献[9]中提出无源控制与滑模控制相结合的方法,不仅维持系统稳定,同时提高了系统的鲁棒性。文献[10]将无源控制与非奇异终端滑模结合,减小了系统的收敛时间。文献[11-12]为了获得更加准确的输出值,利用非线性扰动观测器估计系统的匹配和不匹配扰动,将观测值代入无源控制,提高系统的输出电压精度。文献[13]无源自适应的方法控制DC-DC变换器,无源自适应控制减少观测器的设计,但输出电压准确性并未降低,同时降低了两种及其以上控制方法的设计复杂度。文献[14]利用一种新型的能量函数来设计控制器,相较于普通的能量函数,新型的能量函数提高了输出侧电压的跟踪效果且抗干扰能力较强。文献[5]对不同无源控制算法间的关系进行概括,证明了IDA-PB是目前适应范围最广的无源性控制算法。
本文以Buck-Boost变换器为例,设计一种新型无源复合控制器。首先建立端口受控哈密顿模型,设计无源控制器,通过无源控制中阻尼注入部分将系统负载部分整体呈现为正阻抗特性,从而维持系统稳定。无源控制器的设计需要精准数学模型,因此在初步设计控制器时,忽略寄生电阻的影响,为补偿这一影响,本文通过输入输出侧功率平衡的原则,将寄生电阻所消耗的电压,补偿至非线性状态误差反馈中,利用tan函数改进非线性状态误差反馈中的fal函数,从而获得无源控制器的电流内环控制器,改进后的内环控制对系统的纹波输出,收敛时间等动态性能方面有较好的控制效果;为增强系统抗干扰能力,本文将无源控制的电压环与比例积分控制结合的方式更新外环控制器。经计算机仿真与实验验证:所提无源控制器不仅解决了阻性负载大于恒功率负载时系统振荡的问题,还增强了系统抗干扰能力,同时提升系统动态特性。
电力企业安全风险管控体系的构筑…………………………………………………………………………高 萍,于克栋(1.86)
复方胃炎胶囊对胃炎模型大鼠胃液游离酸度、胃蛋白酶活性及胃动力障碍模型小鼠胃排空的影响 ……… 郑姣妮等(17):2360
1 Buck-Boost变换器数学模型
1.1 系统描述
本文是在Buck-Boost变换器的电感电流连续导通模式下,对系统进行状态空间建模,工作原理如下:在MOSFET导通时电源向电感充电,电容向阻性负载与恒功率负载供电;当MOSFET断开时,电感分别对电容、阻性负载与恒功率负载充电,当电感电流小于平均电流时,电容与电感同时向阻性负载与恒功率负载供电,保持输出电压的稳定[15]。为方便建模给出系统的电路模型,如图1所示。
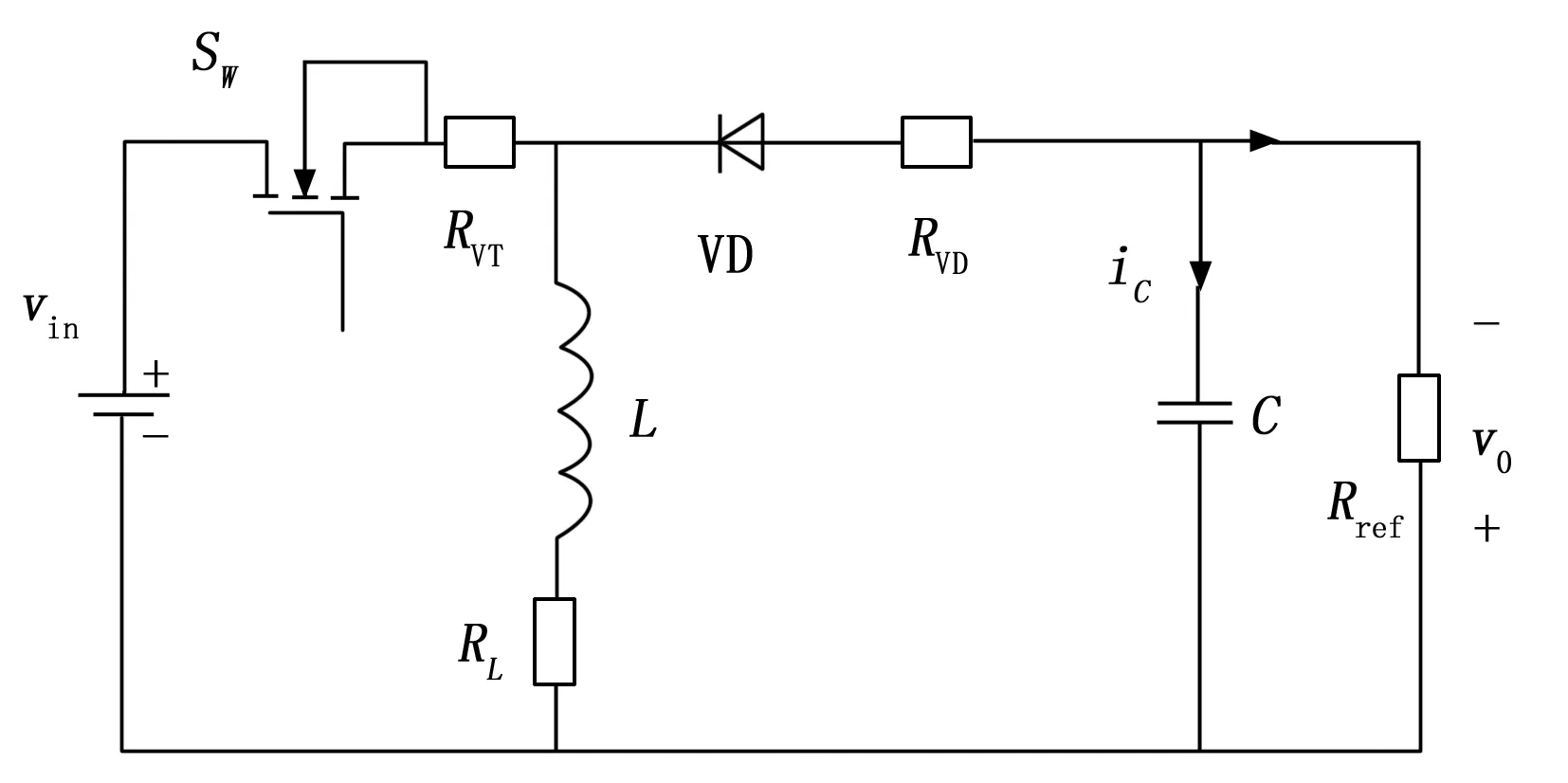
图1 Buck-Boost电路模型
取电感电流与电容电压为系统的两个状态变量,根据基尔霍夫定律与伏秒平衡原理可得Buck-Boost电路数学模型[16]。若x1是电感电流,x2是输出电压,得系统的状态变量方程:
(1)
式中,Rref是阻性负载与恒功率负载的等效电阻,vin是系统的输入电压,P是恒功率负载的恒定功率,其中占空比μ满足μ∈[0,1]。
1.2 恒功率负载对系统影响
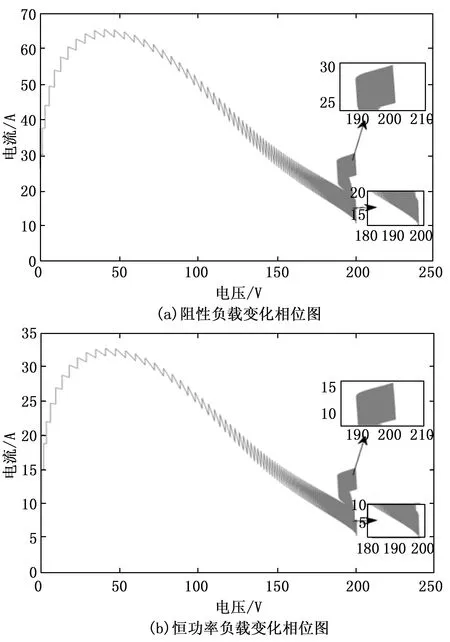
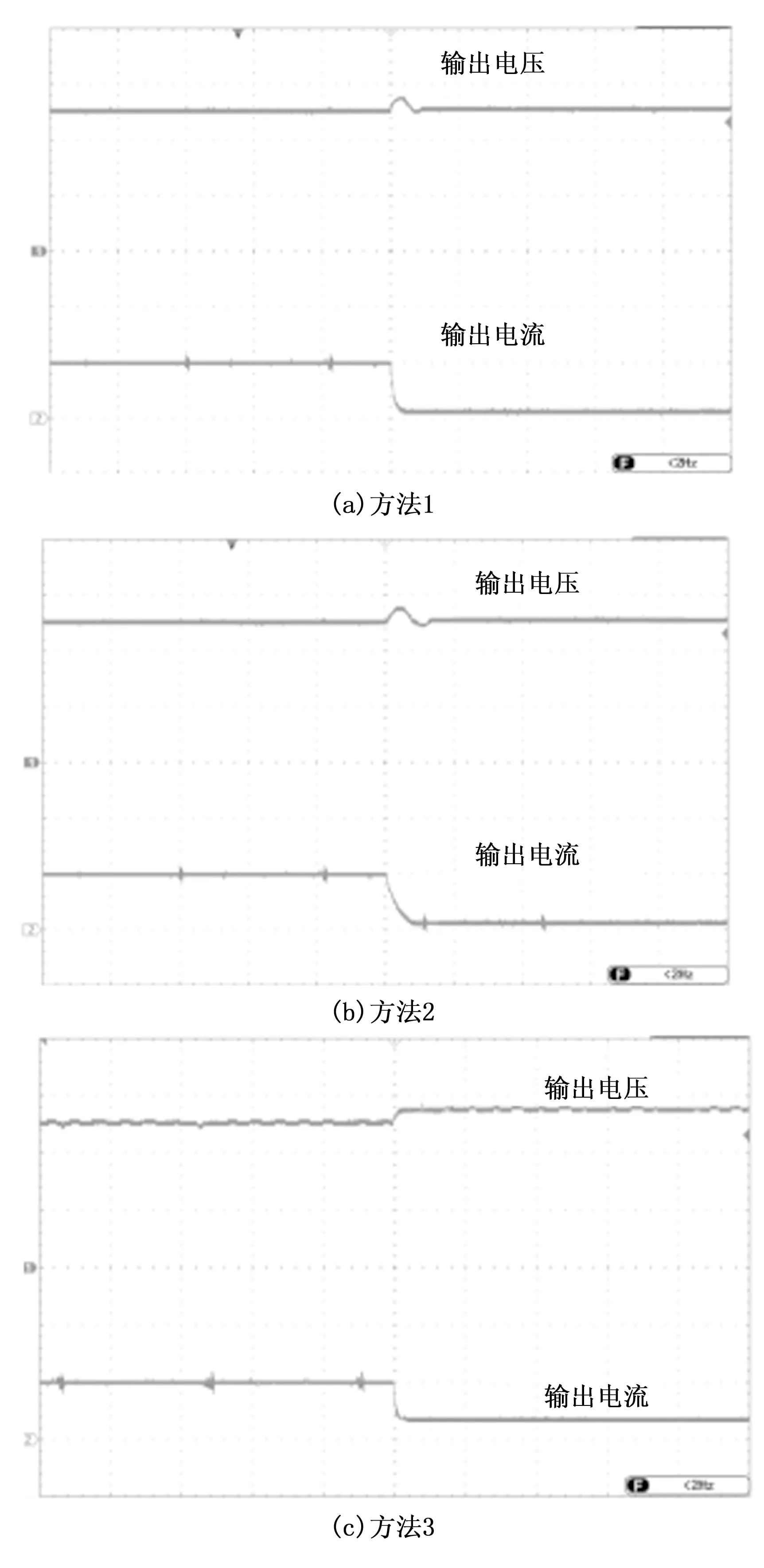
因为恒功率负载的瞬时阻抗为正,但U的增量ΔU负,I增量ΔI为正,根据功率等于输出电压与输出电流的乘积,可知CPL呈现负阻抗特性[17]。恒功率负载对系统的影响如下:若电阻负载阻值大于恒功率负载的阻值即R>RCPL,意味着恒功率负载占主导地位,系统状态以无阻尼响应状态工作,输出端无能量耗散,系统振荡。若若电阻负载阻值小于恒功率负载的阻值即R 方法1与方法2对比可得改进后内环控制器式(22)的优点;方法1与方法3对比可知无源复合控制器有效解决了超调与快速性无法协调的问题;方法1与方法4对比得出,方法1在控制精度与动态性能上均有较好的提升。具体的仿真结果如图3~5所示。 端口受控哈密顿函数一般模型如下[18]: (2) 式中,J(z)是互联矩阵具有反对称矩阵性质;反映系统的互联结构;R(z)是阻尼矩阵,也称耗散矩阵具有半正定矩阵性质,反映了端口附加阻性结构;S(z)是系统能量函数(哈密顿函数);G(z)反映了系统端口特性;是输入信号。 将Buck-Boost变换器数学模型代入式(2)。l系统电感电流x1为电感磁链,输出电压x2为电容电荷量得: (3) 式中,z1为Lx1;z2为Cx2;J1(z)反映系统内部互联结构;Ra(z)反映Buck-Boost变换器的端口的附加阻型结构;S1(z)反映Buck-Boost变换器的存储能量,也是系统的哈密顿函数;G1(z)反映系统端口特性。其具体值如下: 上述矩阵带入式(3)得到:Buck-Boost变换器的端口受控哈密顿模型: (4) 式(19)改写为规范模式: 方法4:文献[2]所提自抗扰控制+无源控制器,其内环控制器为式(21),外环控制器为式(16)。 (5) 式中,D1为系统能量函数中的系数矩阵,具体参数为: (6) 由式(3)下式求导代入上式,得到系统能量平衡表达式: 民族干部从民族群众中来,他们在党联系少数民族中起着桥梁和纽带作用。因此,中国共产党在长征中高度重视加强对民族干部的培养。注重吸收、锻炼、成长出一批优秀民族干部,这是中国共产党和工农红军在长征期间有效落实各项民族政策的基本方式,也正是这一点,为确保了红军长征的胜利和推动中国革命向前发展发挥了重大作用。 (7) 将式(14)与J2(z),Rb(z)代入式(8)可得: IDA-PBC的控制思想为:首先将系统转化端口受控哈密顿模型,进而确定系统的互联结构和阻尼结构,其次通过选定的能量函数,参数化互联矩阵、阻尼矩阵;最后选择最优解,代入期望的闭环系统中,得到无源控制律。 为获得最优解z*,需在S1(z)能量函数基础上,注入反馈控制后的能量函数S2(z),得到期望能量函数Sd(z)。获得所期望能量函数Sd(z)需满足: (8) 式中,Jd(z)为期望互联矩阵;Rd(z)为期望阻尼矩阵。J2(z)为互联注入矩阵;Rb(z)为阻尼注入矩阵。互联矩阵依然满足反对称矩阵;阻尼矩阵满足半正定矩阵条件;S2(z)为反馈控制后注入的能量函数;D2(z):S2(z)系数矩阵。 第三步现场考察渡口两岸情况,在渡口左岸修建拴导航钢丝绳的临时设施,该设施是将横竖各5根、直径8厘米以上、长2米的木头用铁丝均匀地捆扎在一起做底盘,中间十字交叉点套一根直径10毫米、周长2.4米的闭合圆钢,在选好的位置挖一个2.2米×2.2米×0.5米的坑,挖坑时将砂石用编织袋装好备用。将木制底盘放入坑内,底盘间隙处垫上木棍和杂草,再将装有砂石的编织袋压在底盘上,数量不小于3立方米,压放砂石时注意将闭合的圆钢露在外面,便于捆扎导航钢丝绳。右岸选一棵大树来捆扎固定导航钢丝绳。 不失一般性地,给定无源控制律μ、J2(z)、Rb(z)以及D2(z)满足: [J2(z)-Rb(z)]D2(z) (9) 式中,D2(z)满足以下三个条件[19]: 3)李雅普诺夫稳定性条件: 若上述式子均满足条件,则z*为Buck-Boost的期望工作点。系统包含在集合M中,最大不变集为{z*},则系统渐近稳定。 (10) 根据式(1)推导出系统工作在期望工作点时的系统状态空间方程: (11) 式中,Vin、V0及IL,分别为输入电压、输出电压及电感电流的稳态值。根据式(11)可得z*: (12) 由式(12)可得系统的电流稳定工作点,而系统电压稳定工作点为CV0*,其中V0*为V0期望输出电压。取期望的哈密顿能量函数为: (13) 由式(8)与式(12)可得: (14) 由式(7)得基于端口受控哈密顿模型的Buck-Boost变换器具有无源性[17]。 (15) 故无源控制器的外环控制为: (16) (17) 则系统新的外环控制器为: 建筑工程技术在建造建筑的同时非常注重环保,随着社会的飞速进步,环境的污染已然成为人类的首要问题。而建筑工程技术的运用则有效降低了环境的污染速度,虽不能从根本上治污,但建筑师们所采用的环保型材料有效抑制了污染的加剧。最常见的就是建筑节能技术的应用,遵循气候设计,对建筑整体划分区域,对外界条件因素,如风向、太阳辐射等的研究,设计出环保,低耗能的建筑,完全符合环保标准,人们不论是在建筑内工作、学习或是生活,都保证了建筑内最清洁的空气排放以及最节省的能源消耗,对人们的健康与身心都是一种保养。 (18) 式中,Kp,Ti分别为比例系数与积分系数,V0,输出电压的稳态值。 矿区所在的煤系地层分布区属浅切脊状山沟谷。一般标高1 350~1 500 m,最高1 582.5 m(营盘),最低1 277.6 m(紫马河)。相对高差一般30~150 m,最大高差304.9 m。一条北西—南东向(大体沿兴仁与晴隆县之间的县界)延伸的地表分水岭横亘矿区北缘。区边界地表水流向南东,结合各钻孔水位资料(如表1)绘制等水位线图,可得知矿区静止水位标高+1 300~+1 500 m,平均标高+1 429.48 m,地下水因矿井北西部已开采,北西部自北西向东南方向径流,F1断层东侧地下水流向自北东向南西方向径流,在下山河集中排泄,构成一半封闭的独立地下水流系统。 由式(18)中看出,当系统出现外部扰动(电源升高或负载突增)时,μ1输出增加,进而系统输出电压升高,根据自适应可知μ2降低,最终变换器输出电压快速恢复至期望值。反之亦然。关于比例与积分系数的选取:Kp从开始不断增大直至系统振荡,记录临界值。此后将减小,使系统稳定同时记录系统稳定的Kp数值,取当前数值的70%~80%为系统的Kp值。将Kp值固定后,令Ti从0开始不断增大,直至系统出现振荡情况,记录其值,同时将Ti减小使得系统恢复稳定,选Ti的70%为系统当前值。 为验证所提新型无源外环控制器的有效抗干扰性,令内环控制相同,各项参数相同情况下,传统无源控制器(16)与改进后无源外环控制器(18)的控制效果图,由实验图7(a)与图7(b)可知改进后的无外环源控制器可以快速恢复200 V的输出电压,而传统无源外环控制器无法稳定输出至200 V。当阻性负载下降时,改进后的无源控制器恢复时间较短,这表明改进后的控制器有效提升系统的抗干扰能力。 无源控制器设计需要x1,x2而x2的稳定工作点为期望输出电压,因此本小节主要求取x1的期望值。在传统无源复合控制中,内环控制采用变阻尼无源控制将出现静态误差大,响应速度慢等问题。为了解决上述问题,本小结基于端口受控哈密顿模型,利用非线性状态误差反馈,改进内部电流环,从而获得期望输出电流值。先求取Buck-Boost变换器功率平衡表达式: (19) 式中,Vdis是寄生电阻的电压;RL、RVD以及RVT分别是电感、续流二极管以及MOSFET的内阻。控制器μ∈[0,1]。寄生电阻扰动值是在搭建系统的模型,将PWM控制在50%输出时,计算输入输出电压差值来确定寄生电阻所带来的影响。 根据式(3)与式(4)得系统的能量函数为: (20) (21) 在参数一致的情况下,为了提高系统的上升时间与调节时间。本文提出一种新型的fal1函数,相较于传统的fal函数,改进fal1函数可有效提升系统的响应速度。 改进fal1函数为: 应用SPSS 17.0软件建立数据库,并对计划所得DVH数据进行录入和分析。定量资料采用均数±标准差表示。3种治疗方法间的差别采用单因素方差分析方法进行比较,若差别有统计学意义,再进一步作多组间的两两比较。对于服从正态分布的数据,用单因素方差进行分析;而对不服从正态分布的数据,用非参数秩和检验进行分析。以P<0.05为差异有统计学意义。 (22) 式中,β=5;α=0.5;δ=0.01;A∈(1,π);B<1。 海森矩阵: 图2 函数的误差对比 经过本节的论证可得出:电流环所输出电感电流期望值为: (23) 1)在某个区域中Ωl内,V(x) 对哈密顿系统的期望能量函数进行一次与二次求导,获得系统的雅可比矩阵: (24) 从图2fal函数的误差对比可明显看出:系统起动之初,改进后fal1函数的收敛时间快为3 ms小于传统fal函数的23 ms;系统在0.1 s将恒功率负载功率突降,改进后函数的收敛时间远小于传统fal函数的收敛时间,则可得改进后的fal1函数可知效果更好。 (25) (26) 本次仿真的控制目标是:当负载侧变化时,利用无源控制器可以使得输出电压稳定在200 V;在同一电路模型下,采用四种不同的无源控制器进行控制,从图3与图4中分析系统输出的状态变量,比较四种方法控制效果的优劣。为保证仿真的公平性,四种控制方法在同一电路模型下进行仿真,其中电路的参数为输入电压200 V、输出电压200 V、额定电阻30 Ω、恒功率负载2 000 W、j1=1、Ri1=5、Kp=0.01、Ti=2.62、β=5、α=0.5、δ=0.01、A=1.57、B=0.8。 图3 输出电压 图4 输出电流 方法1:本文提出的新型无源复合控制器,其内环控制器为式(22),外环控制器为式(18); 中国特色社会主义进入新时代,我国社会主要矛盾已经转化为人民日益增长的美好生活需要和不平衡不充分的发展之间的矛盾。这一重要论断,符合中国国情,符合现实工作需要,也符合人民群众的实际愿望。十九大报告提出,我们要在继续推动发展的基础上,着力解决好发展不平衡不充分问题,大力提升发展质量和效益。 方法2:传统无源复合控制器,其内环控制器为式(21),外环控制器为式(18); 方法3:文献[3]所提的比例积分控制+无源控制器,其控制器为式(18); 小学生还处于比较贪玩的阶段,在此阶段对于小学生语文习作方面的教育教学,若采用刻板、强硬的教学方式,将严重影响小学生语文习作的积极性,学校的硬性教育加上家长的望子成龙心切,都会造成他们对语文习作这一教学内容的排斥抵触情绪。前面已经指出,教育工作者在提高小学生语文习作水平的道路上,找到了游戏式的教学模式,这种教学模式,将丰富课堂教学内容,激发小学生的学习兴趣,大大提高小学生语文习作水平。对于小学生这一能力的练习与辅导,老师可以在课堂中加入一些小游戏,课外寻求家长的配合,引导家长配合学校教育,加强小学生语文习作练习,完成教学目的,提高教学质量。 常用的选矿工艺指标有:破碎循环负荷及破碎效率、筛分效率、磨机生产能力和磨矿效率、分级效率、返砂比、浮选效率、数质量流程图等,以及主要易耗材料的数据变化分析,如衬板损耗、钢耗、药剂单耗等。通常根据单个生产指标的变化,直接对参数进行调节使其达到最佳参数即可。但是每个选厂实际情况不同,需要从整个流程的多个生产指标来分析,经过综合对比,达到整体效益的最优化。因此,除了对单个环节的生产大数据分析,还需要对不同流程之间的生产数据关系分析,就此,文章分析几组重要的参数关系如下: 在大量使用多媒体教学的同时,结合多种教学方式来引导学生的课堂注意力,提升学习积极性。A.讨论式教学。在教师讲授的过程中,尽量以学生为主体,让全体学生都参与进课堂讨论中来,培养学生的发散性思维,集思广益,通过互相讨论的过程加深对课程内容的理解与思考,从而激发学生对于学习的兴趣,形成学生与教师之间的良性互动。B.自主发现法。在教授课程时,教师可穿插抽出一个章节的内容,只给学生提出一些实例与问题,让学生自己通过查找资料、实验、思考等过程独立的对本章内容进行研究,从而让学生发现并掌握原理与概念。 为避免不同参数对系统的影响,所选取四种方法的Buck-Boost变换器电路参数完全一致,同时比例系数、积分系数及非线性状态误差反馈相关参数也一致,保证了对照组的真实准确性。图3与图4是Buck-Boost变换器在不同控制方法下输出电压与电流图。为验证干扰状态下,系统的控制效果情况,在0.1 s时将负载侧阻值突降。图3是4种方法的输出电压图。从图中可知:新型无源复合控制器与传统无源复合控制相比,新型无源复合控制器(方法1)响应时间为3 ms,小于传统无源复合控制器(方法2)的23 ms,有效缩短系统到达输出电压的时间,这就证明了改进后的fal1函数可以加快系统的响应速度,缩短响应时间;本文所提的新型无源复合控制器(方法1)的输出电压为200 V,文献[2]所提无源控制+自抗扰控制(方法4)输出电压,在0.1 s前为199 V,后为198 V,无法准确达到200 V;新型无源复合控制器与比例积分控制+无源控制相比,新型无源复合控制器(方法1)响应时间为3 ms,小于传统无源复合控制器(方法3)的40 ms,且方法1不存在超调现象,故方法1不仅解决了传统无源控制在外部扰动时系统难以维持稳定输出的问题,同时有效解决了超调与快速性无法协调的问题。 从图4可以看出,虽然新型无源复合控制器(方法1)的电感电流超调大于自抗扰+无源控制(方法4),但是新型无源复合控制器(方法1)的电感电流可准确达到期望电流值,其超调量小于传统无源复合控制器(方法2)与比例积分控制+无源控制(方法3)。 上述结果表明,新型无源复合控制器可以使得Buck-Boost变换器的输出电压收敛速度很好,当负载突变时,新型无源复合控制器使得Buck-Boost变换器有更好的抗干扰能力。 针对R>RCPL即阻性负载阻值大于恒功率负载阻值所存在的振荡问题,从相位图的角度给出说明。图5给出了闭环情况下阻性负载与恒功率负载变化时,系统的相位图。图中横坐标为输出电压,纵坐标为电感电流。因恒功率负载的功率为2 000 W,输出电压为200 V,则恒功率负载的等效电阻值为20 Ω。 图5 系统相位图 图5(a)是阻性负载变化下,系统的相位图。在(0,0.1 s)时,R=30 Ω,RCPL=20 Ω,即R>RCPL,在0.1 s后R=15 Ω,即R 图3、图4及图5四幅图,分别从输出电压、电流与相位三方面阐述,本文所提新型无源复合控制器的有效性。 第3节设计的无源控制器,通过第4节的仿真验证实现了在内部或外部扰动情况下Buck-Boost变换器的能稳压输出,接下来本节通过实验的方式构建系统的实验平台,验证所提算法的有效性。针对Buck-Boost变换器的实验平台,传统控制回路一般通过模拟电路技术进行设计,但这种技术不仅加大外围电路设计难度,且所设计回路的通用性和普适性差。较于模拟电路技术存在的缺点,数字电路技术因其具有的灵活性,实时检测等优点被广泛应用于实际电路。近年来由于半导体工业的不断发展,数字式开关电源开始逐渐进入人们视野。这种开关电源主要采用传感器来判断电源状态,一旦发生故障,便可以及时响应。同时数字开关电源具有高度集成的DSP、MCU等处理器,极大程度上降低了外围硬件电路设计难度。此外当电路参数发生摄动时,不需要向模拟电路一样重新设计,只需修改相对应的程序即可。故本文采取数字电路技术来设计控制回路。 本次实验采用TMS320F28335为主控芯片,围绕其搭建外围硬件电路,硬件电路包含主回路、电压电流采集与检测回路、驱动电路等。芯片负责采集电感电流和的数据进行模数转换与无源控制律的计算,最后通过MOSEFT驱动电路来控制Buck-Boost电路输出。 那时,我们一到暑期就会跟随大人乘坐轿子上庐山,上山后买个大草帽,拿根拐棍四处游玩。小时候,长冲河里的水是可以直接挑回家吃的,那时有一个职业叫挑水工。我们小孩子经常去河里捞鱼摸虾捉小螃蟹,有趣得很。 图6是本次实验的原理图,由主电路模块、控制回路及驱动模块三部分组成。其中基于DSP的控制回路主要包含电压电流A/D采样模块及ePWM模块。本次实验工作流程:编写控制程序;利用DSP的A/D转换模块采集iL和v0两路信号,通过TMS320F28335芯片运算得到系统所需的控制信号;通过MOS管驱动电路输出ePWM来触发开关管从而产生相应占空比;经过所设计的控制器来调节占空比,控制PWM波的输出,使得Buck-Boost变换器的输出电压到达期望值。 图6 实验原理图 为确保实验的公平性,三种方法的系统参数完全一致。实验参数:输入电压12 V、期望输出电压12 V、额定电阻10 Ω、恒功率负载100 W、j1=1、Ri1=5、Kp=0.01、Ti=2.62、β=5、α=0.5、δ=0.01、A=1.57、B=0.8。方法1:本文提出新型无源复合控制器,其无源控制内环控制器为式(22),无源控制外环控制器为式(18),方法2:无源控制外环控制器与方法1一致,无源控制内环控制器为式(21);方法3:传统无源控制,无源控制器为式(16)。 碲标准溶液A: 称取0.1000 g单体碲(光谱纯99.9%)于100 mL烧杯中,加入10 mL硝酸,低温溶解,加4 mL硫酸(1+1)低温加热至恰好冒三氧化硫白烟,取下冷却,加硫酸(1+8)溶解,移入500 mL容量瓶中,用硫酸(1+8)定容。含碲为200 μg/mL。碲标准溶液B:吸取25 mL碲标准溶液A于100 mL容量瓶中,用硫酸(1+8)定容,此溶液含碲50 μg/mL;硫酸(1+1);盐酸(1+1);氢溴酸(1+1)-溴化钾(饱和):用氢溴酸(1+1)配制溴化钾的饱和溶液;亚铁氰化钾溶液:20 g/L。 图7与图8分别是负载在突降与突增状态下系统输出电压与电流的响应曲线。其中图7中三幅图的电压刻度是2 V/div,图8中三幅图的电流刻度是500 mA/div,图7与图8所有图的时间刻度是5 ms/div,其中Rref表述为阻性负载与恒功率负载的等效电阻。 图7 负载突降时输出电压电流曲线 图8 负载突增时输出电压电流曲线 从图7可以看出,输出侧负载由Rref下降至空载时,负载侧的电流值减小,电压处发生突变。具体分析如下:传统无源控制器输出电压远低于12 V即无法输出期望电压,方法1与方法2相比,负载突降时方法1的调节时间小于方法2,方法1与方法3相比,方法1在输出电压、电流波纹及收敛时间均有一定改善。 从图8可以看出,输出侧负载由空载状态接入负载时,负载侧的电流值增加,电压处发生突变。具体分析如下:方法3输出电压值高于12 V无法输出期望电压。方法1与方法2相比,负载突降时方法1的调节时间小于方法2。对于方法1与方法3比较的可知,方法1在输出电压、电流波纹及收敛时间均有一定改善。 最后基于无源控制器搭建了系统实验平台。通过CCS编译器对所提无源算法进行编程与调试。通过三种方法的比较得出:新型无源复合控制器不仅在快速性、超调量等动态性能方面有较好效果,同时所提的无源算法可使Buck-Boost变换器在系统出现内部扰动或外部扰动时,能保持稳定运行。 针对含有恒功率负载的变换器,在R与Rref不同状态下,导致系统的稳定与控制精度问题进行分析设计。文章采用新型无源复合控制器的方法,对含有恒功率负载的Buck-Boost变换器,建立系统的哈密顿模型,参数化互联矩阵同时注入阻尼矩阵;同时利用无源控制的电流环改进的非线性状态误差反馈控制输出期望电流;将比例积分控制与传统无源控制的电压环结合,重新设计系统的电压环。经验证:这种新型无源复合控制器不仅提升了系统收敛速度、减小系统调节时间,还克服了比例积分控制中超调与快速性无法协调的问题。 本文创新点: 1)设计学新型无源复合控制器,使得含恒功率负载的系统,无论处于内部或外部扰动下均能稳定输出。 2)改进无源内环控制器,改进后的控制器,可以较好的提升系统动态性能,减小系统静态误差。 3)改进无源外环控制器,提高了系统的输出精度与抗干扰能力。 为验证本文所提方法的有效性,文章利用不同方法进行仿真与实验,最终得出本文所提方法是可行性。1.3 端口受控哈密顿系统
1.4 Buck-Boost变换器的端口受控哈密顿模型
1.5 系统无源性证明
2 新型无源复合控制器的设计
2.1 无源控制电压外环设计


2.2 无源控制器电流环的设计



3 系统稳定性分析

4 仿真分析
4.1 仿真参数


4.2 仿真结果分析
5 实验验证


6 结束语
猜你喜欢
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
电子制作(2019年12期)2019-07-16
中学生数理化·八年级物理人教版(2019年6期)2019-06-25
北京航空航天大学学报(2017年6期)2017-11-23
互联网天地(2016年2期)2016-05-04
电测与仪表(2015年13期)2015-04-09
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28