
履带式农耕机行进张紧系统的适应控制仿真分析
2023-09-28 03:29王雪
南方农机 2023年20期
王 雪
(宁夏工商职业技术学院机械工程学院,宁夏 银川 750021)
技术进步使我国农耕机自动化程度得到显著提升,履带农耕机因其转弯半径小、爬坡能力强、接地压力大等优势在农业作业中得到广泛应用,尤其在山地应用中较为普遍。履带行进性能对农耕机作业效率有重要影响,若履带张紧力过小,会引发履带松弛,易导致履带上方跳动,使底盘磨损增大;若履带张紧力过大,会增加履带刚性,加大行进内摩擦力,使缓冲效果减弱,轻则加速履带磨损,重则因履带断裂发生事故[1]。由此可见,良好的张紧控制能够有效提升农耕机作业效率与质量。以履带张紧器为例,可借助油压机使其得到部分作用力,若农耕机在行进时突然停止,张紧器此时便可起到缓冲效果,将冲击力转化为内部伸缩运动,避免农耕机受到冲击破坏。针对这些问题,从控制视角对履带式农耕机行进时如何保持良好且有效的张紧力进行研究,以期助力现代农机制造发展。
1 张紧特性
农耕机作业环境极为复杂,部分环境具有不可控性,在不同路况与行进速度下也存在诸多不稳定因素,而行进系统设计是在参数既定的情况下实现的,所以张紧系统中的控制装置就显得极为关键[2]。只有张紧系统的控制模式与张紧特性完全匹配,方可实现高效率的农耕机作业,确保行进系统始终保持在效果最为良好的张紧状态下运行。张紧特性主要包括以下几个方面:1)农耕机作业时,履带张紧受部分不可控因素的影响,张紧过程参数具有随机性与变换性;2)履带张紧具有时滞与非线性特点,时滞受不确定因素影响,且其同样具有随机性;3)履带张紧具有惯性,过程变量多且复杂,变量间也存在较为复杂的关联;4)农耕机在户外作业时会受到诸多干扰因素的影响,且地质情况不同,导致履带张紧无法稳定与均匀,易出现张紧波动的情况[3]。
由此可知,因农耕机履带张紧过程具有不确定性,如果采用数学建模进行控制显然无法获得预期效果,因此需要考察与张紧特性匹配的控制模式与控制算法。
2 控制模式
鉴于上述张紧过程的随机性、变换性与时滞性等特性,从控制论出发,发现目前可实际运用的控制模式较少。传统控制模式的控制器设计一般源于数学模型,但张紧过程是无法通过数学建模进行解释的,所以通过数学方法对张紧过程进行定量描述显然无法实现,即便忽略所有无法处理的因素而构建出模型,实施效果也必然无法令人满意。人工智能理论的发展给控制模式选择提供了全新思路,PID控制由于受张紧不确定因素的影响,难以提前获取实验样本,所以该控制模式并非有效[4];模糊逻辑控制能够处理各类模糊与定量信息,但存在稳态误差,会在工作点附近引起小范围震荡,所以将其用于张紧控制并不理想。智能控制虽然能够描述张紧过程,且可对控制规则进行归纳,但张紧的不确定性易导致其隶属函数无法确定,所以无法有效实施优化控制。人工神经网络控制(Artificial Neural Network, ANN)具有较强的自适应与自组织能力,能够根据输入、输出学会其之间的非线性关系,且不需要系统的数学模型[5]。人工神经网络控制的容错性与适应性能够应对复杂系统在运行时的诸多不确定因素,可显著提升系统的抗干扰能力[6]。此外,其具有的并行结构使其可以快速处理系统内的海量数据,从而提升控制器的Robust(鲁棒性),较好地协调张紧过程中的控制质量要求,所以人工神经网络控制是一种较为理想的控制模式。
3 模型构建
构建基于人工神经网络控制的控制模型,如图1所示,ANN控制器是一种高精度反馈控制器,控制过程即为农耕机履带张紧过程,I1表示张紧输入、I2表示张紧输出、O1表示张紧误差输出、O2表示控制器输出。
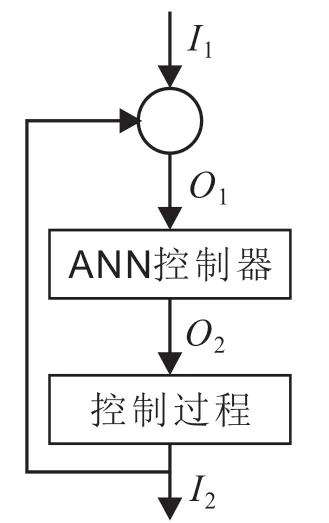
图1 人工神经网络控制模型
若使用x表示张紧误差变化率,则在张紧过程中系统误差与行进轨迹变化如图2所示。若行进轨迹点位于第1、3象限内,即xy>0时,那么绝对值函数abs(x)必然会不断增大;若行进轨迹点位于第2、4象限内,即xy<0时,那么绝对值函数abs(x)必然会不断减小且误差接近于零。根据上述分析,可总结出基本控制方法:1)xy>0时,可选取比例法来减小误差,对张紧过程进行比例控制;2)xy<0时,可选取保持法来自动减小误差,对张紧过程进行保持控制。
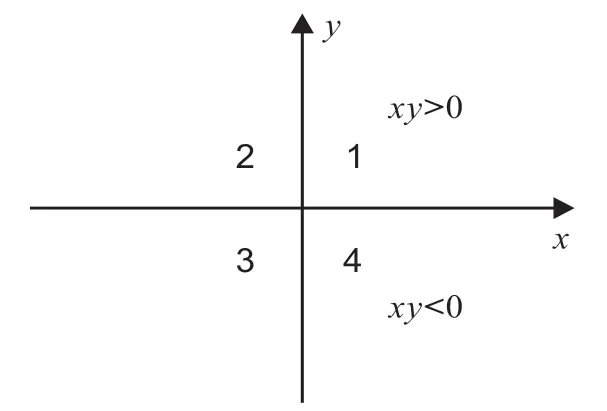
图2 张紧过程中系统误差与行进轨迹变化
4 算法引入
基于构建的人工神经网络控制模型及上述两种基本控制方法(比例法与保持法),引入ANN控制算法,公式表示为:
式中,O2表示ANN控制器输出,x表示张紧误差变化率,xn表示误差最高值的第n次峰值,λ表示比例系数。
对于复杂的过程控制,借助形成式描述规则,将各类控制模式的知识与农耕机现场操作的经验、技巧融入算法内,由此构建出更为完善的ANN控制算法,使其与张紧特性更为符合[7]。可在图2中的x轴或y轴按照误差变化阈值进行深度细分,例如x1、x2、y1、y2等,由此将其划分为更为细化的误差特征块,从而导入不同算法,同时可通过开(闭)交替的形式进行张紧控制。
5 仿真分析
5.1 实验
探讨控制模式的适应效果,其本质即为分析控制模式的Robust[8]。对于跟踪控制来说,Robust强的控制器有良好的适应效果,其跟踪效果较少受到外部环境与内部参数变化的干扰。对张紧控制来说,外部环境与内部参数变化也基本不会对其控制效果产生影响。鉴于此,借助仿真实验验证强Robust效果。由于张紧是一个惯性时滞过程,所以可通过构建1阶惯性时滞模型来描述其过程动态[9]。探讨张紧过程对不同控制模式的过程响应,就能对比不同控制模式的强Robust效果。为了实验便利,选择空间矢量控制为参照与人工神经网络控制进行对比,通过调整过程的结构及施加外部影响模拟实地作业的变化,若其响应时间快、运行稳定、未出现超调与震荡等情况,那么该控制模式因其强Robust效果则必然是具有可取性的。假设1阶惯性时滞模型为:
式中,k表示单位阶跃函数,T表示控制时间。
在Scilab环境下,借助Navisworks搭建仿真模型,在过程阶跃输入信号的影响下,分别采用空间矢量控制与人工神经网络控制对同一过程进行控制,具体的过程响应情况如图3所示。
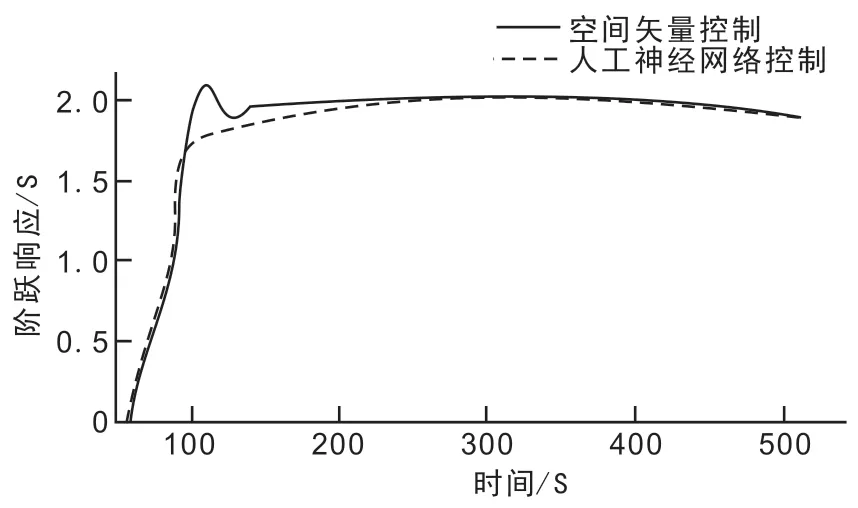
图3 两种控制模式的过程响应情况
根据过程控制参数的变化观察控制模式的Robust效果,若在上述1阶惯性时滞模型中增添惯性环节,则可将原模型转化为:
原模型所有参数保持不变,该模型已从1阶惯性时滞转变为2阶惯性时滞,过程结构也由1阶转变为当前的2阶[10]。在该阶段,相应的过程参数也必然出现了部分变化,在不改变这些实验条件的情况下,添加惯性环节后的两种控制模式的过程响应情况如图4所示。
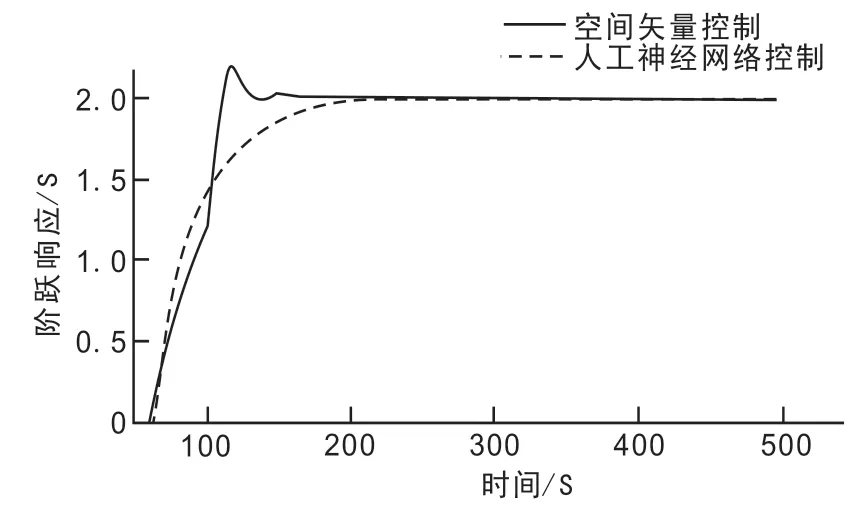
图4 增添惯性环节后两种控制模式的过程响应情况
根据外部影响观察控制模式的Robust效果,在保持上述实验条件不变的情况下,在100 s处增加一个阶跃幅度为0.5的定值干扰信号,两种控制模式在外部影响下的过程响应情况如图5所示。
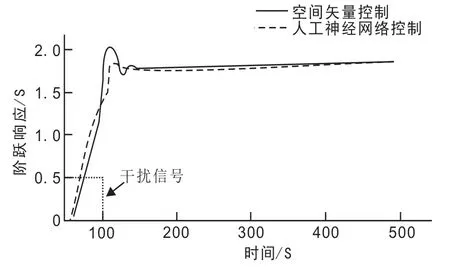
图5 外部影响下两种控制模式的过程响应情况
5.2 结果
1)由图3可知,空间矢量控制出现了部分超调与震荡情况,人工神经网络控制的过程较为稳定,基本不存在超调与震荡问题,表明与空间矢量控制相比,人工神经网络控制更适应行进张紧控制。
2)由图4可知,即便原1阶过程增添惯性环节,人工神经网络控制仍可实现对过程的稳定控制,基本未产生超调与震荡,控制过程的响应效率也表现得极为良好。
3)由图5可知,增设干扰信号后,人工神经网络控制所产生的超调较小,且未产生任何震荡;而对于空间矢量控制来说,其既会产生高频超调,同时也会产生震荡,且超调与震荡的幅度均较大。
由仿真实验结果可知,与空间矢量控制相比,人工神经网络控制模式的Robust效果更优,具有良好的适应内部参数变化与抗外部影响的性能。
6 结论
综上,由于履带式农耕机行进张紧过程参数具有随机性、变换性、时滞性以及非线性等张紧特性,导致目前可实际运用的张紧控制模式较少。本研究提出的基于人工神经网络控制的履带张紧适应控制是一种可供张紧系统设计参考的有效适应控制方法。在Navisworks仿真模型中的实验表明:人工神经网络控制对履带式农耕机行走张紧控制具有良好的适应性,表现出更优的Robust效果,能够快速适应内部参数变化、抵抗外部影响,可为现代农机制造与设计提供参考。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05
中国金属通报(2021年21期)2021-11-19
中国石油石化(2021年8期)2021-03-30
空间科学学报(2020年4期)2020-04-22
机械管理开发(2020年2期)2020-04-16
石油化工建设(2019年6期)2020-01-16
电子制作(2019年10期)2019-06-17
山西焦煤科技(2016年4期)2016-12-01
橡胶工业(2015年4期)2015-02-23
机械工程师(2015年10期)2015-02-02
