
复杂水下环境中的Dual-HFM速度谱优化
2023-10-11 12:59扶钰斌马晓川孙博昊陈筱月裴兴园
系统工程与电子技术 2023年10期
扶钰斌, 马晓川,*, 李 璇, 孙博昊, 陈筱月, 裴兴园
(1. 中国科学院声学研究所水下航行器实验室, 北京 100190;2. 中国科学院大学, 北京 100049)
0 引 言
自然界中蝙蝠擅长用声波进行探测定位,蝙蝠的声波是大宽带信号,频率范围为20~100 kHz[1]。这种生物声纳信号和双曲调频信号(hyperbolic frequency modulation,HFM)接近。HFM信号具有良好的多普勒不变性及时延分辨力[2],目前已被广泛应用于水声通信[3]、主动声纳测速[4]、测距[5]等方面。
在信号时长短、带宽窄、目标运动速度低的情况下,线性调频信号(linear frequency modulation, LFM)和HFM都具有良好的多普勒不变性[6],发射信号瞬时频率与回波瞬时频率十分接近,但是在大时间带宽积或者大多普勒情况下,LFM的瞬时频率随着时间发生较大变化,发射波形和接收波形的相关性下降,匹配滤波结果会发生峰值展宽,影响匹配滤波峰值的参数获取。在小多普勒情况下,LFM具有良好的多普勒容忍性;在大多普勒情况下,运动尺度目标频率扩展等因素导致回波信号畸变,严重影响了LFM匹配处理效果[7]。反观HFM信号,由于其更接近理想的多普勒不变波形,不论是大带宽积或者是高速运动目标,HFM的发射波形和回波均能够很好地匹配,输出尖锐的峰值[8],传统HFM波形探测,依靠匹配滤波时延计算得到目标速度,容易受到噪声干扰。因此,需要一种抗噪声、多径效果较好的波形,于是引入双HFM(dual HFM, Dual-HFM)波形。该波形由两段对称、中间包含空白时间间隔的HFM信号组成。
如今Dual-HFM常用的多普勒估计方法有双相关峰匹配(correlated peak matched, CPM)方法[9]和传统匹配滤波(matched filter, MF)方法[10]。CPM分别对两段HFM到达时刻进行估计,将回波与发射波形进行两次匹配滤波,得到包含速度信息的时延差。CPM对时延差极其敏感,容易受到多径、噪声的干扰。MF是Dual-HFM回波分别和两段反向扫频HFM信号进行匹配滤波而得到的两个峰值,从峰值差提取目标速度信息。尽管发射波形重叠,依旧能够匹配形成时延差,用于估计速度。以上几种方法,不仅对于峰值到达时间极其敏感,并且相关器输出时间间隔为采样频率,多普勒估计值是离散的。
本文介绍了一种抵抗噪声、多径效应能力强的速度谱(speed spectrum,SS)扫描方法[11],深入分析了多径、单目标、双目标情况下速度谱性能,并给出了详细的数学推导。然而,常规速度谱方法易受到复杂水下环境中多径、多目标引起的旁瓣干扰。因此,本文首次提出了基于多帧信号的速度谱旁瓣抑制方法。该方法保留了速度谱计算量低、分辨力高的优点,并可抑制旁瓣干扰,直观提供目标的多普勒信息。
1 Dual-HFM信号
1.1 HFM信号的性质
HFM信号的解析形式如下:
(1)
(2)
式中:t∈[-T/2,T/2];T为单个HFM信号的时长;f0是信号的中心频率;M是HFM信号的调频系数;fl和fh分别是扫频信号下限和上限;Rect (t/T)为矩形窗包络。调频信号的频谱不存在解析表达式,可利用菲涅尔积分近似得到
(3)
根据驻相法,将波动收敛的菲涅尔积分近似为阶跃函数[12],将信号频谱扫频范围(fl,fh)之外的部分置零,得到HFM的频谱表达式如下:
(4)
HFM的相位函数表示为
(5)
通过对相位函数求导[13],得到HFM的瞬时频率函数,忽略式中的2πj并不影响计算,进而可得
(6)
1.2 Dual-HFM信号
本文使用Dual-HFM信号[14],该信号由两段反向扫频的HFM组成,分别为:上扫HFM(Up-HFM)信号和下扫HFM信号(Down-HFM)。起始频率为fl,终止频率为fh,两段HFM采用互为相反数的调频系数M。当目标和接收机之间产生相对运动时,两个HFM回波会产生反方向的时域脉宽伸缩,在前后扫频信号HFM中间设置时间间隔Te,以避免HFM回波伸缩导致数据重叠失真[15]。本文中设置时间间隔Te=T。Dual-HFM信号形式表示为
sDual-HFM(fl,fh,T,t)=
sDown-HFM(T,t)+sUp-HFM(T,t-T-Te)
(7)
设信号扫频范围fl=3 000 Hz,fh=4 000 Hz;T=0.1 s、Te=0.1 s。不考虑噪声及衰减,结果如图1所示。
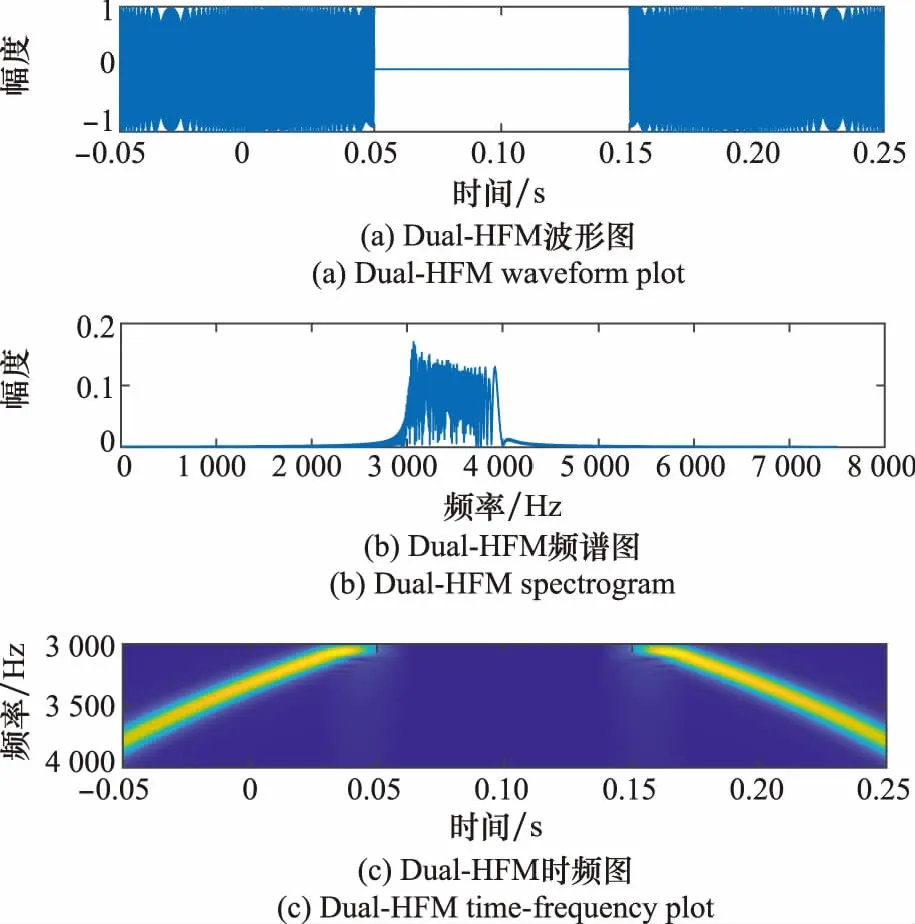
图1 Dual-HFM的波形性质Fig. 1 Waveform properties of Dual-HFM
2 多普勒估计方法
2.1 传统MF
传统MF分别将Up-HFM和Down-HFM与Dual-HFM回波信号进行匹配滤波,得到两个相关峰值,时延关系表示为
(8)
(9)
提取两个相关峰值并相减,其差值包含目标速度信息[16],可得
(10)
(11)
(12)
(13)
其中c为声速,c=1 500 m/s。将图2的双匹配峰值[17]时延信息代入式(13),可以计算出目标速度为5 m/s.
2.2 CPM
CPM的主要思路:将匹配滤波得到的两条曲线做第二次匹配滤波,其峰值时延差Δτdouble-corr表示为

(14)
式中:E2(t)是Up-HFM和Dual-HFM回波信号匹配滤波;E1(t-τr)是Down-HFM和Dual-HFM回波信号匹配滤波[18]。
将得到的参数减去Dual-HFM信号长度,代入式(13),即可得到目标速度值,如图2所示。

图2 MF及CPM方法的时延估计曲线Fig.2 Time delay estimation curve of MF and CPM
2.3 Dual-HFM的速度谱估计方法
文献[19]提出了利用Dual-HFM进行速度谱估计的方法。该方法计算量小,以采样频率的倒数为间隔,高精度估计目标速度。设统计量U(f)为
U(f)=f4|X(f)|2(S(f))2
(15)
式中:X(f)为Dual-HFM回波信号的傅里叶变换;S(f)是Down-HFM发射信号的傅里叶变换。根据驻相法,设定f∈[fl,fh]。以防止U(f)逆傅里叶变换后受到时域信号的干扰,需要首先将信号补零至大于两倍Dual-HFM信号长度。本文中统一补零至8T。
为了获得目标的多普勒估计,只需对U(f)进行反傅里叶变换得到u(t)。u(t)曲线包含了Dual-HFM回波分别与Up-HFM、Down-HFM匹配的峰值时延差,结果如图3(a)所示。

图3 统计量u(t)时延关系曲线及对应速度谱曲线Fig.3 Statistical result of u(t) time delay relation curve and corresponding speed spectrum curve
速度谱对u(t)峰值附近的一定范围进行高分辨率扫描,主动声纳条件下,速度谱y(v)表示为
(16)
(17)

设目标运动速度为5 m/s,得到的速度谱结果如图3(b)所示。图3(b)结果直观显示出目标速度为5 m/s。
3 多径多目标情况下的速度谱方法
在通信、雷达、声纳、地震、地球物理勘探、生物医学等应用场景,信号可能产生多径效应。多径效应指主动声纳信号在水下沿不同方向传播,经过海面、海底反射等不同路径最终抵达接收机并产生叠加,引起接收机信号失真的现象[20]。
多径效应对通信、雷达、声纳等系统的性能造成重要的影响[21]。对于水下系统,多径效应对于多普勒估计易造成虚假目标干扰。
水下环境复杂,目标的多样化,使现代声纳探测面临巨大挑战,多目标多普勒估计是水下探测的重要一环。
下文将对速度谱方法在多目标、多径环境下的稳健性进行分析。
3.1 单目标多径速度谱
本节给出多径速度谱旁瓣位置的详细推导。首先,建立浅海多径示意图,假设声源距离水面5 m,接收机距离水面305 m,目标声源和接收机水平距离为600 m。由于距离较短,忽略声线在温度、盐度、深度影响情况下的弯曲,默认水声沿直线传播。只考虑海面、海底反射路径,建立如图4所示的示意图。

图4 3条多径环境示意图Fig.4 Schematic diagram of three multipath situations
经过海面反射的第2条路径时间pathtime2,表示为
(18)
式中:θ为声源向上传播路径与海面的夹角,设θ=60°。
声源直达接收机的信道路径时间pathtime1表示为
(19)
路径2的时延τ2,及主路径1和主路径2的时延差μ2表示为
μ2=|pathtime2-pathtime1|
(20)
τ2=τ+μ2
(21)
式中:τ为主路径1时延。同理可以计算出路径3的时延pathtime3和主路径1的时延差μ3:
(22)
μ3=|pathtime3-pathtime1|
(23)
式中:β为声源向下传播路径与竖直方向夹角,设β=30°。
接收机收到的信号xMP(t)为3条路径的叠加,表达式为
xMP(t)=A1x0(t)+
A2x0(t-μ2)+A3x0(t-μ3)
(24)
式中: A1、A2、A3为强度常量,与衰减系数相关。
将式(24)代入式(15),做傅里叶逆变换得到uMP(t)的表达式
A1A2[u0(t-μ2)+u0(t+μ2)]+
A1A3[u0(t-μ3)+u0(t+μ3)]+
A2A3[u0(t-μ23)+u0(t+μ23)]
(25)
式中:μ23=|pathtime3-pathtime2|。式(25)可化简为
uMP(t)≈G4exp(j2πλ(k))·
δ(t-Δτ+μ2)]+A1A3[δ(t-Δτ-μ3)+δ(t-Δτ+μ3)]+
A2A3[δ(t-Δτ-μ23)+δ(t-Δτ+μ23)]]
(26)

在单目标情况下,峰值数量Num1和路径数量Z1存在关系Num1=Z1·(Z1-1)+1。结果如图5所示。
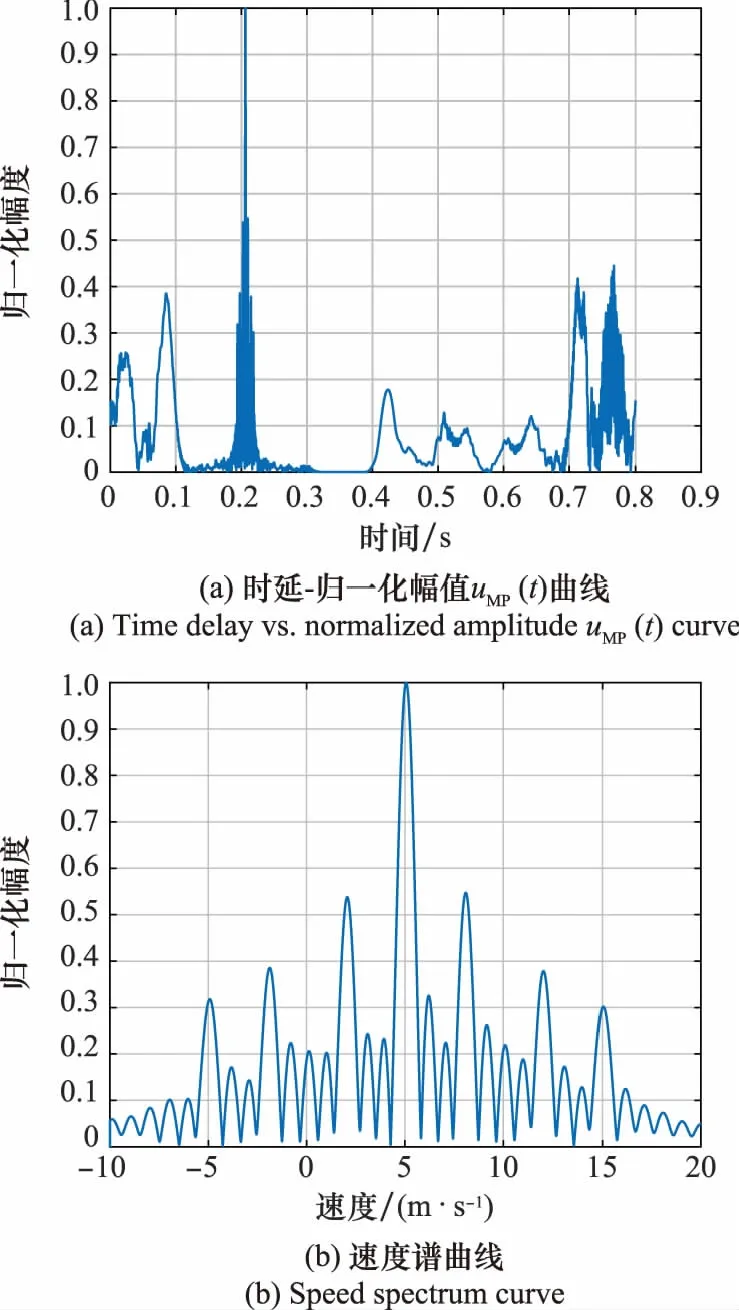
图5 3条多径情况下uMP(t)时延关系曲线和速度谱曲线Fig.5 uMP(t) time delay relation curve and speed spectrum curve for the three multipath scenario
根据图5(b)的结果,速度谱曲线出现1条主瓣和6条旁瓣。分析图5(a)的结果,主、旁瓣之间的时延差符合式(26)的推导。
因此可以总结出单目标通用的多径速度谱公式:
(27)
式中:Am、An为强度常量,与衰减系数相关;tm、tn为不同路径的时延。
3.2 双目标速度谱
异速双目标由于运动速度不同,回波脉宽伸缩量不同,速度谱结果与单目标速度谱不同[22]。
建立不同运动速度的双目标水下模型示意图(见图6),并展开详细研究。设置声源1和声源2位于同一水平位置,距离水面5 m,水平距离10 m,声源1与接收机水平距离为600 m,垂直距离为300 m。声源1径向速度设为v1=10 m/s,声源2径向速度设为v2=5 m/s。

图6 不同速度的双目标水下模型示意图Fig.6 Schematic diagram of a dual-target underwater model at different velocities
设置由回波伸缩[23]不同引起的峰值匹配时延差μM1表示为
μM1=W·|k1-k2|·TH
(28)

声源2海面反射路径和声源1主路径的时延差μM21表示为
μM21=|target2pathtime-target1pathtime|
(29)

双声源速度谱关系式表示为
udouble(t)≈G4exp(j2πλ(k))·
AM1AM2δ(t-(Δτ11+Δτ22)/2+μM21)+
AM2AM1δ(t-(Δτ11+Δτ22)/2-μM21)]
(30)
式中:AM1、AM2为强度常量,与衰减系数相关;Δτ22及Δτ11包含目标运动多普勒[24]信息。通过式(30)可以看出,速度谱的旁瓣以双目标峰值中心位置对称。
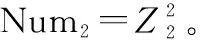
图7是不同速度的双目标的udouble(t)时延关系曲线及速度谱曲线,图7(b)双声源速度谱结果包含4个峰值,难以区分速度峰值和旁瓣,所以需要一种普遍适用的旁瓣抑制方法。
图7 多径情况下不同速度的双目标的udouble(t)时延关系曲线及速度谱曲线Fig.7 Dual targets, udouble(t) delay curve and speed spectrum curve at multipath condition of different velocities
3.3 双目标多径速度谱
同理,可将速度谱推广至异速双目标、多径情况。
设置目标1的径向运动速度v1为10 m/s,目标2的径向运动v2为5 m/s,每个目标都有一条海面反射路径,如图8(a)所示。双目标速度谱曲线如图8(b)所示,因旁瓣干扰,很难分辨出目标1和目标2的多普勒信息。

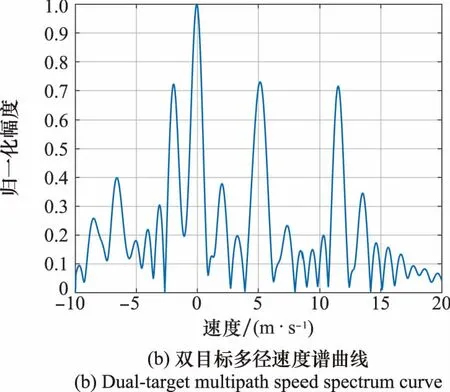
图8 双目标多径速度谱曲线及双目标水下多径示意图Fig.8 Schematic diagram of dual-target multipath speed spectrum curve and dual-target underwater multipath
4 基于多帧信号的速度谱旁瓣抑制方法
4.1 基于多帧信号的单目标多径速度谱旁瓣抑制方法
在低信噪比环境中,多径旁瓣会影响多普勒估计结果。抑制多径速度谱旁瓣,无疑能够提高多径速度谱的抗噪声干扰能力。
本文提出了基于多帧信号的旁瓣抑制方法,通过声纳多帧数据的对比和联合处理[25],利用另一维度信号空间中目标回波信息与多径杂波旁瓣的差异性,挖掘回波中的目标多普勒信息,从而达到抑制速度谱旁瓣的效果[26]。
基于图4所示的模型,不失一般性地,假设目标径向速度不变,引入第2帧速度谱。
第2帧Dual-HFM,路径1时延差pathtime1f2可表示为
pathtime1f2=pathtime1-(vd·Tm)/c
(31)
式中:径向速度vd=5 m/s;Tm为帧间时延差,设为1 s。
第2帧Dual-HFM,路径2和路径3时延差pathtime2f2、pathtime3f2可表示为
pathtime2f2=pathtime2-η2
(32)
pathtime3f2=pathtime3-η3
(33)
式中:η2为第1帧、第2帧路径2由于目标运动引起的时延差;η3为第1帧、第2帧路径3由于目标运动引起的时延差,计算同前,在此不展开论述。
对比第1帧、第2帧速度谱,选取较小的速度谱值,即可得到旁瓣抑制的双目标速度谱ysuppression(v),表示为
ysuppression(v)=min{y(v),ysecond(v)}
(34)
式中:y(v)是第1帧的速度谱,ysecond(v)是第2帧速度谱。
将两帧速度谱曲线逐点对比,取较小的速度谱值,可以得到旁瓣抑制的速度谱曲线,如图9(b)所示。

图9 单目标多径旁瓣抑制速度谱曲线Fig.9 Single-target multipath sidelobe suppression speed spectrum curve
从图9(b)可以看出,基于多帧信号的单目标多径速度谱旁瓣抑制效果较好,旁瓣高度从0.65降低至0.3左右,降低幅度约为53.85%。
4.2 基于多帧信号的双目标速度谱旁瓣抑制方法
如图7所示,双目标的速度谱存在4个峰,难以区分目标速度的实际峰值和伪峰。
为了自动提取出双目标的实际速度值,将第4.1节提出的多帧信号的旁瓣抑制方法应用于双目标情况。不失一般性地,假设两个目标与接收平台之间的径向速度不同,且在相邻帧内保持不变[27]。因此,速度谱的两个目标实际峰值位置应不变。而由于两个目标的速度不同,其时延差发生变化,导致两帧速度谱旁瓣的位置改变。可通过多帧速度谱对比,取小的速度谱处理,以有效抑制速度谱的旁瓣。
如图6所示,目标1径向运动速度v1为10 m/s,目标2径向运动速度v2为5 m/s。
第2帧目标1、目标2的路径时延差分别设为 frame2_target1ptime、frame2_target2ptime,可表示为
frame2_target1ptime=
target1pathtime-(Ts·v1)/c
(35)
frame2_target2ptime=
target2pathtime-(Ts·v2)/c
(36)
式中:设Dual-HFM帧间时延差Ts=1 s。利用式(34),绘制旁瓣抑制的速度谱结果,如图10所示。

图10 不同速度的双目标旁瓣抑制速度谱曲线Fig.10 Sidelobe suppression speed spectrum curve for dual-target of different velocities
由图10(b)可以看出,双目标速度谱旁瓣抑制效果较好,可以推广到多目标速度谱旁瓣抑制场景。
4.3 基于多帧信号的双目标多径速度谱旁瓣抑制方法
设水下双目标多径情况如图8(a)所示,将4.1节提出的多帧信号抑制速度谱旁瓣方法应用到该情况中[28]。双目标多径速度谱旁瓣数量较多,所以引入帧间间隔为1 s的三帧Dual-HFM速度谱联合处理。该方法依旧能够很好地抑制大部分干扰旁瓣,结果如图11(b)所示。
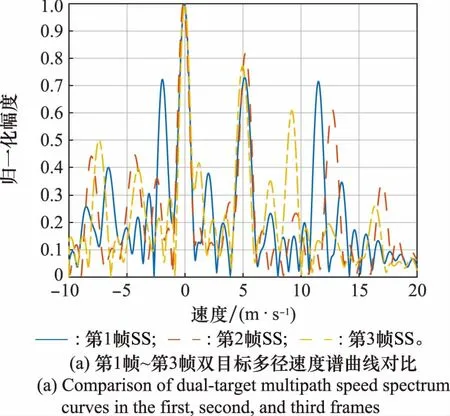
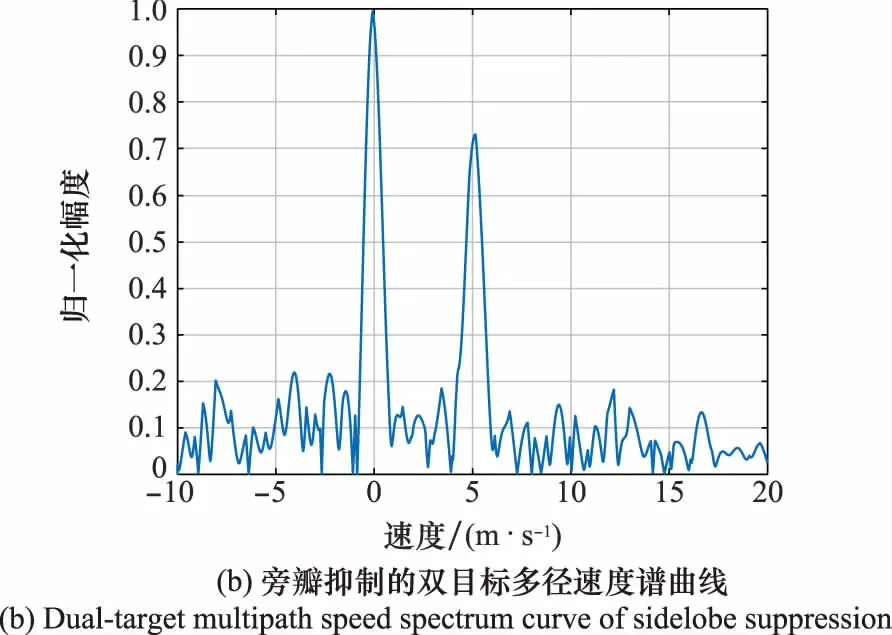
图11 双目标多径旁瓣抑制速度谱曲线Fig.11 Dual-target multipath sidelobe suppression speed spectrum curve
由图11可以看出,旁瓣从0.7左右降低至0.2,降低幅度约为71.43%。此时可清晰分辨出双目标的多普勒信息。
5 不同多普勒估计方法抗干扰能力的对比
针对CPM、MF和速度谱方法的抗干扰能力对比,设计了以下实验[29]。设置路径数量3、5、7,路径之间的时延差按表1设置。主路径衰减系数设为1,其他路径衰减系数在(0,1)之间随机生成[30]。
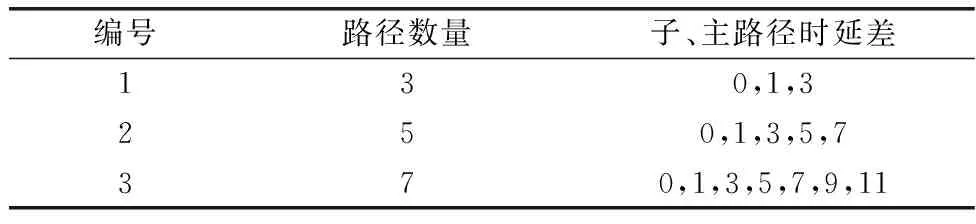
表1 不同多径时延设置Table 1 Different multipath time delay settings ms
图12中的曲线结果均由1 000次蒙特卡罗数值模拟得到,对比单目标多径情况下,不同信噪比多普勒估计均方根误差(root mean square error, RMSE)的变化趋势。图12(a)中的MF、SS、CPM分别代表MF、SS方法、CPM方法,数字代表路径数量。图12(b)中SS代表常规速度谱,SS-Suppression代表旁瓣抑制的速度谱方法。
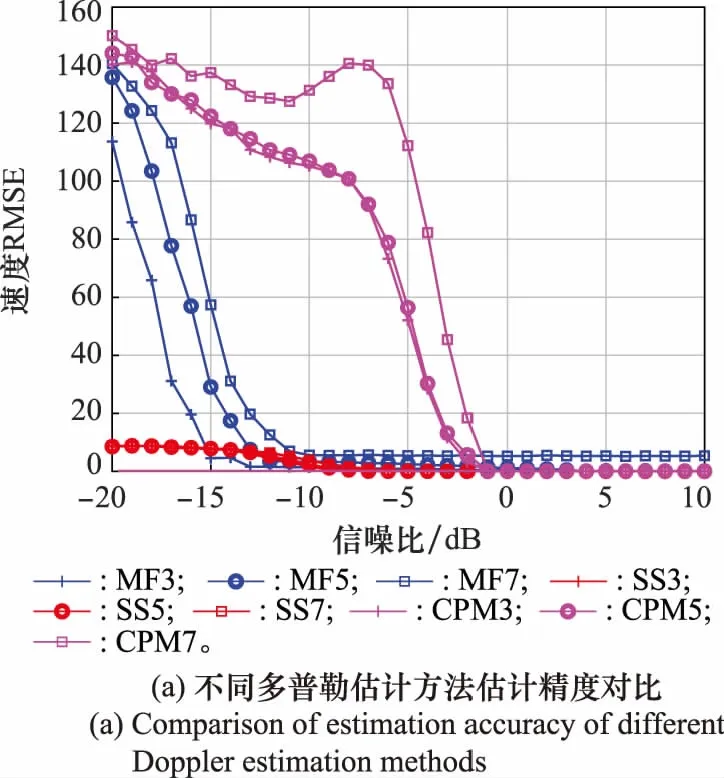

图12 单目标多径情况下不同多普勒估计方法估计精度对比Fig.12 Comparison of estimation accuracy of different Doppler estimation methods in the case of single target and multipath
通过图12(a)可以看出,单目标多径条件下,CPM和MF稳健性较差,容易受到噪声和多径干扰。
由于速度谱只在速度窗内进行高分辨率的速度扫描,可忽略速度窗之外的噪声及多径干扰。因此,速度谱在强干扰环境中,具有良好的多普勒估计精度。
图12(b)为单目标、三路径情况下,对比旁瓣抑制速度谱方法和常规速度谱方法,多普勒估计RMSE随信噪比变化的趋势。由图12(b)可以看出,本文提出的速度谱旁瓣抑制算法能够使多普勒估计RMSE提前2 dB收敛。此外,在相同信噪比情况下,旁瓣抑制的速度谱估计精度比常规速度谱估计精度高。
6 结 论
本文根据不同水下环境建模,分别给出了Dual-HFM速度谱在多径、多目标条件下旁瓣位置的数学推导,指出Dual-HFM速度谱在复杂水下环境中容易受到旁瓣干扰,影响目标参数估计的问题。因此,本文提出基于多帧信号的速度谱旁瓣抑制方法。该方法可用于抑制单、双目标多径速度谱旁瓣,且保留了速度谱计算量低、连续高分辨的优点。经数值模拟验证,结合多帧信号处理的速度谱优化方法抗噪声能力进一步提升,为后续的Dual-HFM速度谱实际工程应用提供了重要参考。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
海军航空大学学报(2020年2期)2020-07-27
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
电子技术与软件工程(2017年12期)2017-07-05
系统工程与电子技术(2016年7期)2016-08-21
电测与仪表(2016年17期)2016-04-11
电测与仪表(2016年14期)2016-04-11
电子器件(2015年5期)2015-12-29
机械与电子(2014年2期)2014-02-28
