
基于侦察干扰一体化的双干扰机系统对抗SAR-GMTI方法研究
2023-10-11 12:59刘业民李永祯黄大通邢世其余晓伟
系统工程与电子技术 2023年10期
刘业民, 李永祯,*, 黄大通, 邢世其, 余晓伟
(1. 国防科技大学电子科学学院, 湖南 长沙 410073; 2. 桂林联勤保障中心, 广西 桂林 541001)
0 引 言
合成孔径雷达(synthetic aperture radar, SAR)具有全天时、全天候和高处理增益的工作特点,是战略侦察和战场监视系统的重要组成部分,其与地面运动目标指示(ground moving target indication, GMTI)相结合,即SAR-GMTI,可获得全面详尽的战场态势图[1],这对地面重要的军事目标构成了严重的威胁。为此,研究如何有效对抗SAR-GMTI系统的干扰手段,具有非常重要的军事意义和现实需求。
在雷达电子战领域,针对SAR-GMTI系统的欺骗干扰技术一直是工业部门和科研工作者研究的重点方向之一[2],其干扰方法大致可分为两大类:单干扰机生成虚假运动目标干扰方法和双干扰机生成虚假运动目标干扰方法。李伟等[3]最早开展SAR虚假运动目标的生成方法,通过距离向延时和方位向多普勒调制模拟真实运动目标回波信号,可在SAR图像中形成虚假运动目标。随后,许多学者根据这一思路,从延迟规律[4]、频域调制[5]、多普勒频移随行干扰[6]、运动调制原理[1,7]以及虚假运动场景信号生成[8]等方面深入研究了单部干扰机生成虚假运动目标的干扰方法。随着研究的深入,学者们发现单部干扰机生成虚假运动目标的方法在对抗SAR-GMTI系统时有存在其固有缺陷,即干扰信号经SAR-GMTI系统处理后,雷达系统估计出虚假运动目标的径向速度与干扰信号初始设定的径向速度不一致,且经定位后虚假运动目标方位向位置与干扰机方位向位置一致,与干扰信号初始设定位置无关[2,9-11]。针对此缺陷,张静克[2]提出了一种基于双干扰机协同的虚假运动目标生成方法,通过合理选择两个干扰机所调制的散射系数之比保证干涉相位和设定的径向速度相匹配。随后,Sun等[11]提出了一种新的基于双干扰机协同对抗双通道SAR-GMTI的干扰方法,该方法相比文献[2]所提方法更为简洁,只需通过求解线性方程组,将求解出的复调制系数应用到每部干扰机上,生成的干扰信号可有效控制虚假运动目标径向速度和方位向位置。然而,文献[2]和文献[11]所提方法,均需预先知道SAR载机平台速度、干扰机离SAR载机平台最近斜距以及干扰机自身位置等侦察参数,这些参数通常需要复杂的侦察设备获取。
基于以上背景和问题,本文提出了一种基于侦察干扰一体化的双干扰机系统对抗SAR-GMTI的干扰方法,并给出具体的实施步骤。该方法基本思路为:侦察干扰一体化双干扰系统由配置完全相同的两套干扰机组成,且每套干扰机额外配置两台接收机,每台干扰机和接收之间通过有线方式通信,利用干扰机和接收机布站以及接收机间到达时差(time difference of arrival, TDOA)信息,解决了需复杂设备侦察关键参数的难题,简化了干扰系统的配置。本文共分为四部分:首先阐述了基于多接收机的侦察干扰原理;接着给出了基于侦察干扰一体化双干扰机对抗SAR-GMTI系统的干扰算法及具体实施步骤;然后分析了几个关键参数存在误差时对干扰效果的影响;最后通过仿真实验验证了所提方法的可行性。
1 基于多接收机的侦察干扰原理
假设SAR工作在正侧式条带模式下,SAR载机平台以速度va沿直线匀速运动,载机平台高度为H,以载机飞行方向为x轴的正方向,垂直于x轴在地面的投影为y轴正方向建立右手直角坐标系Oxyz,原点O为当方位向慢时间ta=0时,SAR载机在地面上的投影点,如图1所示。O′点为SAR条带中心线与y轴的交点,且OO′=Y。在SAR条带区域内放置一部干扰机,其坐标为(xJ,Y+yJ,0)。以该干扰机坐标为中心,以r为半径的圆上放置了两部接收机,分别位于图中的A点和B点,其坐标分别为(xA,Y+yA,0)和(xB,Y+yB,0)。则对于任意慢时间ta,SAR载机到接收机A和接收机B以及干扰机J的瞬时斜距分别为

图1 多接收机侦察干扰的几何模型Fig.1 Geometric model of multi-receiver reconnaissance and jamming
(1)
式(1)中,载机到接收机A的瞬时斜距RA(ta)与干扰机的瞬间斜距RJ(ta)可近似表示为
(2)

同理,式(1)中载机到接收机B的瞬时斜距RB(ta)与干扰机的瞬间斜距RJ(ta)可表示为
(3)
式中:ΔxJB=xB-xJ;ΔyJB=yB-yJ。
若每台接收机均与干扰机通过有线方式连接来实现通信功能,由图1可知每台接收到干扰机的传输距离均相同。考虑到接收机通常部署在在干扰机附近区域,则有r≪RJ,故式(2)和式(3)中r2/2RJ的值很小,通常可以忽略不计。那么,RA(ta)与RJ(ta)以及RB(ta)与RJ(ta)的瞬间斜距差可表示为
(4)
对于干扰机而言,两部接收机与干扰机的相对位置是已知的,且RA(ta)与RJ(ta)以及RB(ta)与RJ(ta)的瞬间斜距差可通过测量各自接收到的TDOA获得[12-14]。因此,式(4)可用如下方程表示:
(5)
(6)
式中:M表示式中最左边的系数矩阵;det(·)表示矩阵的行列式;ΔRJA(ta)=RA(ta)-RJ(ta);ΔRJB(ta)=RB(ta)-RJ(ta)。
(7)
类似于式(2)的推导方法,可得RP(ta)与干扰机的瞬时斜距RJ(ta)之间的关系为
(8)
式中:ΔxJP=xP-xJ;ΔyJP=yP-yJ。考虑到若生成的虚假运动目标在干扰机附近,则式(8)中最后一项通常可以忽略其对干扰调制效果的影响。为此,斜距差ΔR(ta)=RP(ta)-RJ(ta)可近似为
(9)
根据SAR欺骗干扰原理[1],若在目标P处生成一个虚假运动目标,则在干扰机截获到SAR信号后,利用式(9)对截获的SAR信号在距离向做延时处理以及在方位向做多普勒调制,则干扰机转发给SAR的干扰回波信号可表示为
(10)
式中:AJ为干扰信号幅度大小;sJ(tr,ta)为干扰机截获的SAR信号;tr为快时间;符号⊗为卷积操作符;δ(·)为冲击函数;τJ=2ΔR(ta)/c,c为光速。
为避免卷积运算,提高其干扰实时性,可在距离向作快速傅里叶变换(fast Fourier transform, FFT)[15-16],即
(11)
式中:fr为距离向频率;fc为SAR信号载频。

2 双干扰机协同干扰SAR-GIMT实施步骤
为了克服前面提到的单干扰机生产虚假运动目标方法的固有缺陷,文献[2]和文献[11]分别提出了利用双干扰机协同干扰SAR-GMTI系统的干扰方法,然而这两种方法均需要提前侦察到以下参数:① SAR载机平台速度;② 干扰机离SAR载机平台最近斜距;③ 干扰机自身坐标位置。获取这些参数通常需要借助于额外的侦查系统,这大大增加了干扰系统配置的复杂性。为解决这一难题,本文在文献[11]所提方法的基础上,提出了一种基于侦察干扰一体化的双干扰机系统对抗SAR-GMTI的干扰方法。
为了方便阐述,以SAR载机平台飞行方向为x轴的正方向,垂直于x轴且平行于SAR系统垂直波束方向为斜距方向,建立xOr坐标系,如图2所示。假设SAR系统工作在GMTI模式,其沿航迹方向放置了两部天线,两者相位中心的间距为d,天线T1(图2中蓝色实心圆点)发射雷达信号,天线T1和天线T2(图2中绿色实心圆点)同时接收雷达回波信号。在SAR照射条带区域内放置两套如第1节所描述的侦查干扰系统,第1部干扰机J1附近放置两台接收机A和B,第2部干扰机J2附近放置两台接收机C和D,每部干扰机与其附近的两台接收机通过有线方式连接,两部干扰机间也通过有线方式连接进行通信。

图2 双干扰机协同干扰几何模型Fig.2 Geometric model of cooperative jamming of dual-jammer

(12)


(13)

(14)

(15)
根据文献[11]所提方法,当SAR波束同时覆盖两套干扰设备时,两部干扰机发射的干扰信号还需各自调制一个复调制系数,即
(16)
式中:Q1和Q2分别为对应于第1部干扰机和第2部干扰机的复调制系数。
综合以上分析,下面给出本文所提方法的干扰实施步骤,共分3个阶段。
第1阶段(侦察SAR信号波长λ和PRF):假设SAR满足“一步一停”的工作条件[1],当SAR天线T1运动到点A1时,第1套干扰系统的某部接收机截获到SAR信号,如图2中红色虚线所示;当SAR天线T1运动到点A2时,SAR波束刚好覆盖第1套干扰系统,即第1部干扰机J1和接收机A和接收机B刚好同时能够截获到SAR信号。在航迹A1A2段,第1套干扰机系统可通过分析截获的SAR信号,获取其SAR信号参数λ和PRF。
第3阶段(双干扰机协同干扰):当SAR天线T1运动到点A4时,SAR波束边缘刚好扫过第2套干扰系统的某个接收机,如图2所示。在航迹A3A4阶段,两套干扰系统在SAR的每个脉冲重复间隔期间除各自完成第二阶段的任务外,还需根据式(12)各自调制虚假运动目标。在此基础上,第1部干扰机根据ΔxJ2P以及式(16)计算出复调制系数Q1和Q2,并通过有线通信将Q2传给第1部干扰机。最后,根据SAR系统的PRF,每套干扰机分别向该雷达系统协同转发各自调制的干扰信号。
3 误差分析
(17)

(18)


4 仿真实验验证与结果分析
在仿真实验中,采用方位向一发两收的SAR-GMTI系统验证本文所提方法的可行性,其雷达系统仿真参数如表1所示。

表1 SAR-GMTI系统仿真参数Table 1 Simulation parameters of SAR-GMTI system
为简便起见,采用xOr坐标系来描述干扰场景信息,假定两部干扰机距离向位置相同,方位向位置间距为30 m。由于SAR系统在x轴方向上具有平移不变性,为不失一般性,设定第1部干扰机的坐标为(0 m, 10 000 m),干扰机和接收机布站如图2所示,在满足最小条件数情况下,接收机A和B的坐标分别为(3.5 m, 10 003 m)和(-3.5 m, 9 997 m)。同理,设定第2部干扰机的坐标为(30 m, 10 000 m),接收机C和D的坐标分别为(33.5 m, 10 003 m)和(26.5 m, 9 997 m)。在干扰场景中设定8个虚假目标,分别用阿拉伯数字1~8标识,其中目标1~4个为虚假运动目标,目标5~8为虚假静止目标,其距离向径向速度设定和初始位置如表2所示。为了直观描述虚假运动目标的分布情况,图3给出了虚假目标位置分布示意图,其中实心圆表示虚假静止目标,三角形表示虚假运动目标,三角形指向表示目标的运动方向。采用距离-多普勒成像算法,利用偏置相位中心天线技术进行动目标检测,通过沿航迹向干涉(along track interferometry, ATI)技术进行动目标距离向径向速度估计(无特别申明后文中的速度均指距离向径向速度)。
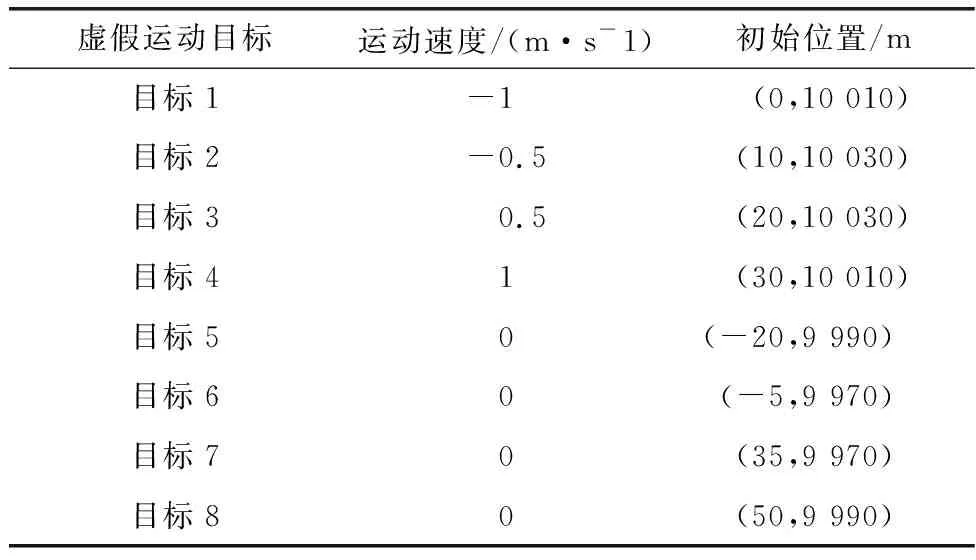
表2 虚假目标运动速度和位置设定Table 2 Velocity and position setting of false target
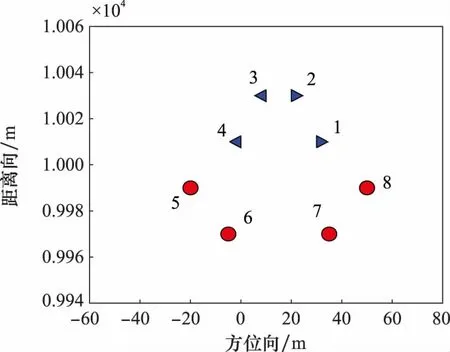
图3 虚假目标位置分布示意图Fig.3 Schematic diagram of false targets distribution


图4 虚假运动目标检测、干涉和定位结果Fig.4 False moving target detection, interference and location results
表3给出虚假运动目标速度估计和方位向定位结果及其误差。可以看出,速度和方位向位置估计值与表2中设定参数之间误差很小。此外,从表3中可以看出,虚假运动目标3距离两部干扰机较远,其速度和定位误差比其他3个虚假运动目标要相对略大一些,这是因为忽视式中ΔRJkP所引起的,这与第3节的误差分析结果是吻合的。

表3 虚假运动目标速度估计误差及定位误差Table 3 Velocity estimation error and location error of false moving target
值得指出的是,表3中的数据并未考虑DTOA测量误差,然后这类测量误差是不可避免的。为此,下面考虑DTOA测量误差对虚假运动目标速度估计及定位估计的影响。文献[13]研究表明,DTOA测量误差可模型化为零均值的高斯白噪声,其误差标准方差最小可达1.5×10-4m。基于此,表4给出了当DTOA误差的标准方差为1.5×10-4m时虚假运动目标速度及定位估计误差,其他仿真条件与图4相同。表4中的数据是100次蒙特卡罗仿真实验的结果,分别给出了速度估计最大(平均)误差和定位估计最大(平均)误差。此外,图5给出了每次蒙特卡罗实验中虚假运动目标的速度和定位误差波动图。将图5、表4与表3对比可知,当TDOA误差的标准方差为1.5×10-4m时,虚假运动目标速度和定位估计误差受TDOA测量误差影响较小,与表3中速度和定位估计误差相差不大。
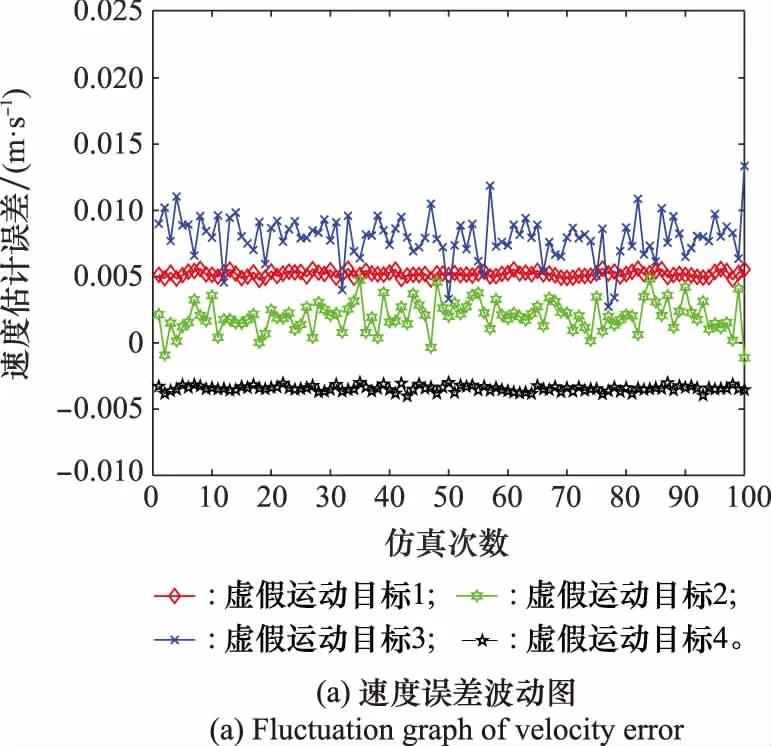
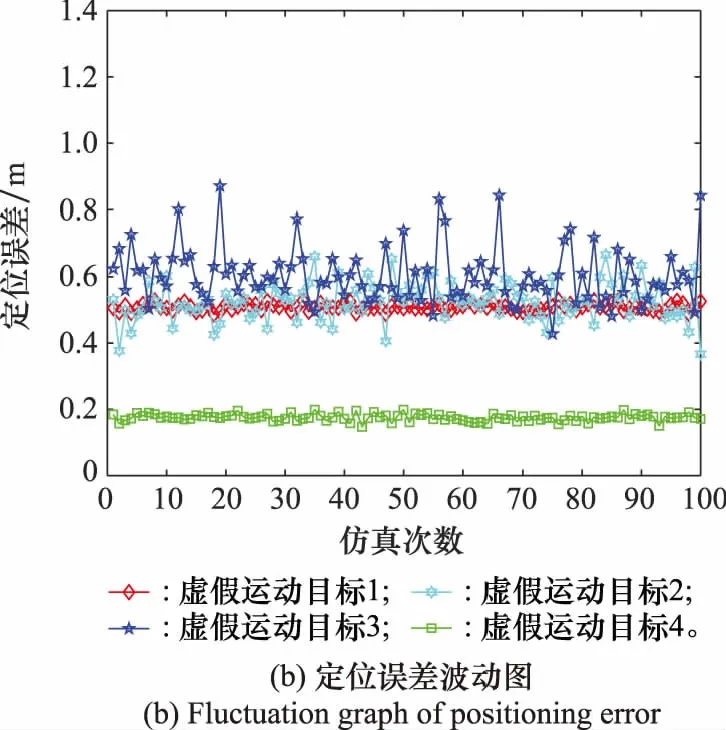
图5 虚假运动目标的速度和定位估计误差波动图Fig.5 Fluctuation graph of velocity and location estimation error of false moving target

表4 虚假运动目标速度及定位估计误差(TDOA误差的标准方差为1.5×10-4 m)Table 4 Velocity and location estimation error of false moving target (when standard deviation of TDOA error is 1.5×10-4 m)
图6进一步考虑了不同TDOA测量误差对虚假运动目标速度估计及定位估计的影响。从图6可以看出,当TDOA误差的标准方差小于等于4×10-4m时,TDOA测量误差对虚假运动目标速度及定位估计的影响较小,当大于4×10-4m时,其虚假运动目标速度及定位估计误差陡然变大。因此,尽量提高干扰系统的TDOA测量精度,可避免因TDOA测量精度过低而影响其最终的干扰效果。

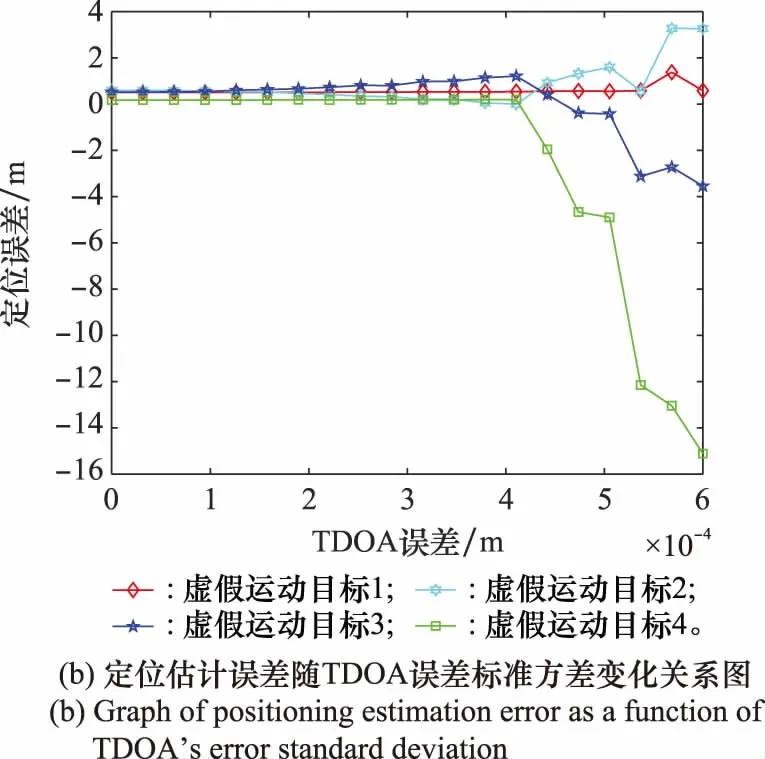
图6 虚假运动目标的速度和定位估计误差随TDOA误差标准方差变化关系图Fig.6 Graph of false moving target’s velocity and positioning estimation error as a function of TDOA’s error standard deviation
接下来,考虑延时脉冲数n对虚假目标速度估计和定位估计的影响。在仿真实验中,当n=2时,估计SAR-GMTI系统两天线间距d=0.8 m是准确的。表5和表6分别给出n=1和n=3时(分别对应于估计两天线间距d=0.4 m和d=1.2 m)虚假运动目标速度和定位估计误差,其他仿真条件与图4相同。对比表5、表6以及表3可知,当估计SAR-GMTI系统两天线间距分别为d=0.4 m和d=1.2 m时,对虚假运动目标速度和定位估计误差的影响很小。

表5 虚假运动目标速度及定位估计误差(n=1)Table 5 Velocity and location estimation error of false moving target (n=1)

表6 虚假运动目标速度及定位估计误差(n=3)Table 6 Velocity and location estimation error of false moving target (n=3)
图7给出了n=2(天线间距的d估计准确)逐渐递增到n=6(对应两天线间距的估计值d=2.4 m)时,延时脉冲数n对虚假运动目标速度和定位估计的影响。图7和对比表3可知,即使两天线间距估计误差很大时,其对虚假运动目标速度和定位估计的影响较小,这对干扰方是有利的,因为干扰方通常难以准确侦察出SAR-GMTI系统的两天线间距。

图7 虚假运动目标的速度和定位估计误差随延时脉冲数变化关系图Fig.7 Graph of false moving target’s velocity and positioning estimation error as a function of delay pulse number
为进一步阐述所提方法的干扰效果和性能,将真实和虚假运动目标的成像量化指标进行比较,具体包括真假目标偏移量误差、速度估计误差、定位估计误差、距离和方位向冲击响应宽度(impulse response width, IRW)、峰值旁瓣比(peak side lobe ratio, PSLR)以及积分旁瓣比(integrated side lobe ratio, ISLR)。仿真条件与表3相同,其中真假目标的速度、初始位置等参数设定均相同,TDOA测量误差为1.5×10-4m,两天线间距估计误差为0.4 m,进行100次蒙特卡罗仿真并对目标偏移量误差、速度估计和定位估计误差数据取平均值。图8给出真实和虚假运动目标1的成像结果品质对比图,表7列出了4个真假目标成像量化指标对比结果,其中表中每项指标的第1行和第2行分别对应真假运动目标成像量化指标数值。由图8和表7可知,虚假运动目标除了定位估计误差,目标方位向IRW、PSLR以及ISLR比真实运动目标稍微偏大一些(导致目标方位像主瓣略微展宽,旁瓣略微抬高,如图8(d)所示),其他成像量化指标与真实运动目标几乎相同,仿真结果验证了本文所提方法总体上干扰效果良好。
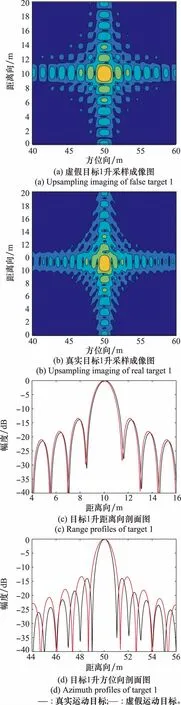
图8 真假目标成像结果品质对比Fig.8 Comparison of imaging results quality between true and false targets

表7 真假目标成像量化指标对比Table 7 Comparison of quantitative imaging indexes between true and false targets
最后,为验证本文所提方法的干扰效果性能,现将所提方法与文献[2]以及文献[11]所提方法进行对比。对比方法的仿真条件与表3相同。表8给出了3种方法速度估计和定位估计误差的结果,其中本文所提方法考虑了TDOA测量误差(标准方差为3×10-4m)和估计SAR系统两天线间距为d=2 m(延时脉冲数n=5),进行了100次蒙特卡罗仿真实验并对速度估计和定位估计误差数据取平均值。从表8中可知,本文所提方法与文献[2]和文献[11]所提方法在虚假运动目标速度和定位估计误差上的数量级相当,且本文所提方法无需额外复杂的侦察设备,主设备仅需要两部具有TDOA测量功能的干扰机和额外4台接收机即可。因此,与文献[2]和文献[11]所提方法相比,本文所提方法的干扰系统配置更为简洁,干扰手段更为实用。

表8 不同方法干扰性能对比Table 8 Performance comparison of different jamming methods
5 结束语
本文利用干扰机和接收机布站以及接收机间TDOA信息,提出了一种基于侦察干扰一体化的双干扰机系统对抗SAR-GMTI干扰方法,并给出了具体的实施步骤。该方法有效地解决了双干扰机协同干扰所需的关键侦察参数,如SAR载机平台速度、干扰机离SAR载机平台最近斜距以及干扰机自身位置等等,简化了干扰系统配置。理论分析和仿真实验结果表明:在考虑了TDOA测量误差以及对SAR-GMTI系统两天线间距存在侦察误差的情况下,本文所提方法仍然可有效生成速度和方位向位置可控的虚假运动目标,是一种实用的双干扰机协同干扰方法。值得指出的是,如何提高TDOA的测量精度是本文所提方法的关键技术,以及如何定量分析虚假运动目标与两部干扰机相对位置对径向速度的估计误差以及方位向定位误差的影响,这将是下一步需要研究的问题。
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
南京航空航天大学学报(2022年2期)2022-04-27
航天电子对抗(2019年4期)2019-12-04
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年9期)2017-12-18
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
军事运筹与系统工程(2016年4期)2016-07-10
现代兵器(2016年6期)2016-06-25
