
闪烁诱偏对抗反辐射无人机策略分析
2023-10-12 06:03刘洪亮王永海刘朝阳丁桂强
航天电子对抗 2023年4期
刘洪亮,王永海,刘朝阳,丁桂强
(中国人民解放军63889部队,河南 孟州 454750)
0 引言
反辐射无人机是一种以电磁波导引攻击地面雷达和其他无线电设备的武器[1-2],它通常利用目标雷达或其它辐射源的电磁波信号作为制导信息,当反辐射无人机上的导引头接收到辐射源信号后,对其进行识别、分选,实时检测无人机与目标辐射源的角度偏差信号,形成控制指令,引导无人机飞向并最终摧毁目标。反辐射无人机搭载的常规被动雷达导引头抗诱偏干扰的方法有多种,主要通过提高导引头在能量域、频域、时域等方面的分辨力[3],达到尽早区分雷达与诱饵信号的目的。
针对常规被动雷达导引头主要攻击雷达副瓣的特点,为保护雷达,在能量域往往要求有源诱饵天线等效辐射功率高于雷达副瓣平均功率,并通过合理设置雷达波束扫描方向和诱饵天线波束指向,使两者主、副瓣对应导引头的重叠覆盖区域尽量大,从而增大诱偏成功的概率。同时为了增加导引头识别分选诱饵信号的难度,在频域设置与雷达频率接近或相同的诱饵信号。反辐射无人机的导引头大多采用脉冲前沿跟踪体制[4-5],它通过采集靠前到达的脉冲信号进行采样处理,因此在时域,往往要求诱饵信号在信号辐射时间上能适当覆盖雷达信号前后沿,且雷达和诱饵脉冲重复周期相同,达到抑制导引头前后沿跟踪的目的。
对于装配常规被动雷达导引头的反辐射无人机,因其普遍采取前沿跟踪技术,所以当雷达及其有源诱饵采取闪烁诱偏时,抗反辐射效果更加明显[6-7]。闪烁诱偏通过2个或多个诱饵相互配合使用,使导引头无法锁定雷达,在对诱饵进行自我保护的同时[8],使反辐射无人机偏离被攻击雷达。
在以往文献中,对于诱饵布站方法、诱饵信号脉冲前后沿保护时序设置等均有较多的成熟结论,但对于如何运用闪烁诱偏提升诱偏效果的研究较少,尤其是反辐射无人机在打击配备诱饵的雷达时,通常采取饱和式无差别攻击战术,以期达到消耗所有诱饵进而摧毁雷达的目的,因此开展闪烁诱偏对抗反辐射无人机策略的研究就显得尤为迫切。本文从闪烁诱偏机理入手,结合仿真分析,给出合理的闪烁诱偏策略,为提高反辐射对抗中雷达和诱饵的生存概率提供技术支撑。
1 闪烁诱偏抗反辐射无人机工作机理
通常闪烁诱偏指功率闪烁诱偏和时序闪烁诱偏,功率闪烁诱偏指多个诱饵按照一定的周期开关,当反辐射无人机进入诱偏阵地后,其导引头接收到的空间合成信号反复跳变。
时序闪烁诱偏划分为同步闪烁诱偏和异步闪烁诱偏。异步闪烁诱偏的2个或多个诱饵之间不存在严格的时间同步关系,各个诱饵按照各自的规律闪烁,当反辐射无人机进入诱偏阵地后,距雷达和诱饵之间的距离时刻在发生变化,使得诱饵信号不能始终在时域上覆盖雷达信号,雷达信号存在被识别出的风险。
一般而言,通常采用脉冲前沿超前的同步闪烁诱偏,即2个或多个诱饵之间存在严格的时间同步关系,并且诱饵发射的诱偏信号前沿始终超前雷达信号,在任一时刻,导引头只能采集到某一诱饵的前沿信号,而无法采集到雷达前沿信号[9-10]。此外,为了防止反辐射导引头具有脉冲后沿跟踪功能,在典型的多点源诱偏时,通常采取多个诱饵信号脉冲前后沿完全覆盖雷达信号,此时诱饵信号完全包裹雷达信号,雷达信号将完全隐匿起来,如图1所示。

图1 雷达及诱饵闪烁时序示意图
其中,3个诱饵信号的脉宽均大于雷达信号脉宽,雷达和诱饵信号的重复周期相同。
同步闪烁诱饵的“闪烁模式”主要是指多诱饵信号在发射信号持续时间、相对先后次序上的各种组合情况;“闪烁周期”则主要是指完成一次“闪烁模式”所需的时间。以图1所示的3个诱饵进行同步闪烁诱偏为例,诱饵1、2、3同时发射诱偏信号,3个诱饵前后沿分别超前滞后雷达脉冲信号不同时间,在某一固定周期T1后,该3个诱饵超前滞后雷达信号的时间随机切换。由于反辐射无人机导引头通常是在某段时间内稳定采集信号若干个有效脉冲后锁定目标,在作战中通常会使用大量反辐射无人机对雷达和诱饵进行无差别饱和攻击,为了在保护雷达的同时减少诱饵损失,降低反辐射无人机锁定某诱饵的概率,通常在时序闪烁的基础上,再叠加诱饵功率闪烁。诱饵功率闪烁时,3个诱饵按照一定的周期T2随机有1个诱饵不工作,防止无人机锁定该诱饵后进行攻击。需要注意的是,T2除以T1商一般不为整数,且T1和T2的设置应参考反辐射无人机飞控响应时间等因素。
2 闪烁诱偏抗反辐射无人机策略分析
为便于分析,以两点源诱偏为例,当反辐射无人机由远及近飞行时,设O1、O2两个辐射源的工作参数设置相同,2辐射源的距离为L,2站采取闪烁诱偏方式工作。
2.1 仅有功率闪烁
2个辐射源交替开机工作,设2站的工作时间均为t0,关断时间均为t1,则2辐射源的工作周期t=t0+t1。假设反辐射无人机垂直来袭,当O1站工作时,反辐射无人机的导引头将捕获O1辐射源的信号,并向O1辐射源进行运动,此时辐射源O2不工作;随后O2辐射源开始工作,O1辐射源停止辐射信号,那么反辐射导引头将重新捕获O2辐射源的信号,并向O2辐射源的方位运动,运动的时间同样为t0。如此反复,反辐射无人机的导引头无法始终跟踪其中任一辐射源,反辐射无人机受2辐射源工作周期影响所做的摆动,可以近似看成反辐射无人机以2个辐射源连线的中点为轴的左右摇摆运动,如果2个辐射源的功率比为β=1,反辐射导弹左右运动的幅度相等,摆动幅度与辐射源的工作时间相关,时间越长幅度越大,此时某个辐射源的击毁概率也在增大。这种情况下,反辐射导弹的瞄准点不是2个点源位置连线的中点,而是其中的某个点源,根据辐射源工作时间和导引头的自身性能等条件,则反辐射无人机的飞行状态可以分为2种: 1)如果反辐射无人机在每个辐射源工作期间无法及时建立跟踪,说明单站工作的时间过短,反辐射无人机的导引头没有采集到足够数量的脉冲,导引头将一直处于搜索状态,那么最后无法击中辐射源。2)反辐射无人机能够在每个辐射源工作期间建立跟踪并调整跟踪方向,在最后将以最大过载转向某个辐射源。
下面讨论反辐射无人机与辐射源间达到最大分辨角情况下的运动过程,如图2所示,分2种情况分析:
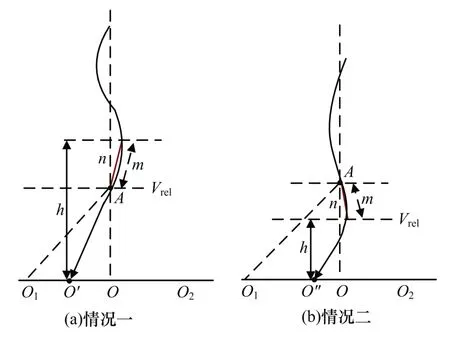
图2 反辐射无人机与两点源位置示意图
情况一:当反辐射无人机运动到A点时,2辐射源与反辐射无人机间的夹角达到导引头的最大分辨角ΔθR,反辐射无人机向着O1运动,如果此时O1不工作而O2工作,但是O2辐射源已经脱离反辐射导引头的最大分辨角,则反辐射无人机仍然向着O1工作,不会转向O2,此时反辐射导弹的落点为O';情况二:当反辐射导弹运动到A点时,反辐射无人机与2辐射源间的夹角均为最大分辨角,设反辐射无人机在到达A点的前一时刻正向着O2运动,恰好此时O1工作而O2不工作,反辐射导弹在A点可以收到O1的工作信号,并转向O1,最后落点为O″。
因反辐射导引头的分辨角一般为几十度,当反辐射无人机运动到A点时,反辐射无人机与地面的距离较近,无人机已没有足够时间修正与辐射源间的误差距离,导弹将以最大过载Jmax作圆弧运动,此时可将闪烁诱偏看成能量质心诱偏,只不过导引头的瞄准点不是辐射源能量质心,而是某个辐射源,最后落点将位于O'O″之内。若反辐射无人机圆弧运动半径为R,则其最大可修正距离为:
因此,针对功率闪烁诱偏方式,主要选择以下诱偏策略:1)选取多点源有源诱偏方式,通常采用1个雷达配备3个诱饵构成4点源诱偏系统,在阵地布局上多采用“菱形”、“Y字形”和“前置正三角形”等诱偏阵型;2)各诱饵辐射源的功率比β=1,防止某一诱饵功率过大,使反辐射无人机攻击策略切换成大信号跟踪模式,导致闪烁诱偏失效;3)各诱饵辐射源按照一定的周期T2随机闪烁,每个周期均有1个诱饵不工作,且每个诱饵辐射功率信号的工作时间不大于无人机飞控系统响应时间Tc,避免无人机锁定某个诱饵后稳定跟踪攻击。
2.2 仅有时序闪烁
大多数反辐射无人机装载的反辐射导引头均采取脉冲后沿跟踪体制,因此,采用脉冲前沿超前的同步闪烁诱偏,使得始终存在至少1个诱偏信号超前雷达信号,此时导引头只能采集诱饵的前沿信号,而无法采集到雷达前沿信号。当采取时序闪烁诱偏时,其诱偏效果与采取功率闪烁情况基本相似,也是通过调整不同诱饵辐射源超前雷达信号,破坏反辐射导引头对辐射源信号的前沿跟踪,使其在不同辐射源之间摆动跟踪。
为了达到诱偏效果,针对时序闪烁诱偏方式,主要选择以下诱偏策略:
1)选取多点源有源诱偏方式。
2)各诱饵辐射源的功率比β=1。
3)各诱饵辐射源按照一定的周期T1进行闪烁,每个周期内各诱饵信号超前滞后雷达信号的次序随机变化,以四点源诱偏方式(1个雷达3个诱饵)为例,其中3个诱饵相对雷达信号的时序关系如表1所示。
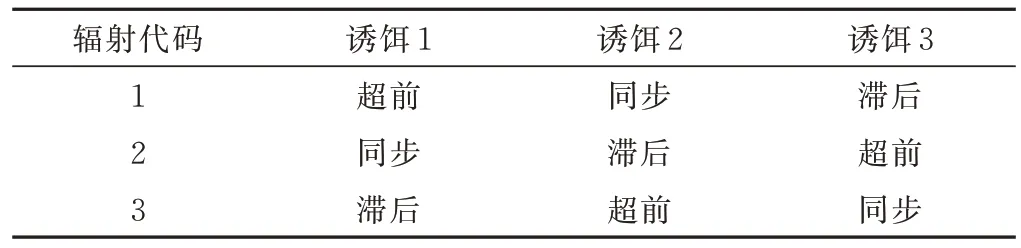
表1 诱饵信号辐射次序表
表1中每个辐射代码代表1组辐射信号时序关系,4点源诱偏基本的信号时序关系有3种,则在辐射信号时,可以随机从3种时序关系中,按照脉间变化或脉组变化设置对应时序。
4)诱饵信号超前滞后雷达信号的时间需大于反辐射导引头的时间分辨力(后者通常能达到微秒级)。
为了更有效地设置诱饵信号超前滞后雷达信号的时间,通常可以根据雷达、各诱饵位置以及目标来袭位置来考虑。当反辐射无人机在诱偏保护空域范围内任意位置来袭时,由反辐射无人机相对雷达和诱饵的位置关系,通过坐标转换计算各诱饵与雷达间的最大时间补偿值与最小时间补偿值,从而在该最大最小补偿时间范围内选取超前滞后时间量。
5)需要注意的是,每个诱饵信号超前雷达信号的时间也应不大于反辐射无人机飞控系统响应时间Tc,以避免无人机锁定某个诱饵后稳定跟踪攻击。
2.3 功率闪烁+时序闪烁
由于反辐射无人机的被动雷达导引头多数采取大信号跟踪与前沿跟踪的技术体制,为了更好地诱偏反辐射无人机,同时能够达到诱饵自我保护的目的,在设置闪烁诱偏时,更多的是在时序闪烁的基础上复合功率闪烁,以降低反辐射无人机锁定某诱饵的概率,其主要对抗策略如下: 1)雷达和诱饵信号之间严格时间同步,雷达和诱饵信号参数设置要有细微差别,防止诱饵信号对雷达造成干扰;2)各诱饵功率相同且天线波束指向始终保持一致,雷达天线的主、副瓣置于诱饵信号的波束覆盖范围之内[11-12];3)功率闪烁周期T2与时序闪烁周期T1之比不为整数;4)设置T1和T2时,应确保单个诱饵被反辐射导引头截获的时间不大于反辐射无人机的飞控响应时间。
3 闪烁诱偏条件下反辐射无人机攻击仿真
采取4点源诱偏态势,3个诱饵按前三角形态势部署于雷达前,3个诱饵间相互间距310 m,雷达距诱饵中心为600 m。
反辐射无人机巡航高度2 000 m,巡航速度50 m/s,自雷达阵地上方采取俯冲攻击态势,俯冲向下过载5 g,最大杀伤半径20 m;反辐射导引头天线的水平与俯仰平面分别采用双基线干涉仪比相法测向体制,半波束宽度50°。雷达始终辐射信号,各诱饵辐射源的功率比为β=1,对反辐射无人机攻击情况进行仿真试验。
各诱饵间进行时序闪烁,每个闪烁周期内有1个诱饵信号超前雷达信号、1个滞后雷达信号、1个与雷达信号保持同步,同时设置功率闪烁,每个闪烁周期内只有1个诱饵工作,单个诱饵持续辐射信号时间为0.4 s,反辐射无人机飞控响应时间为0.5 s,以无人机导引头开始工作的时刻作为采集数据的起点,图3—4分别为反辐射无人机攻击轨迹图及反辐射导引头瞄准点散布图。

图3 闪烁诱偏时反辐射无人机攻击轨迹
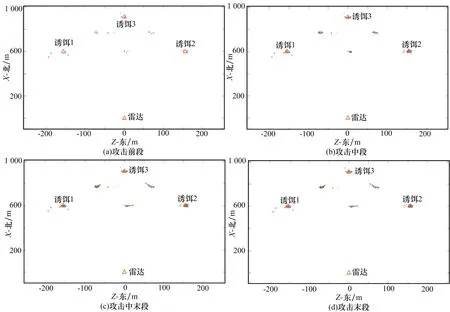
图4 反辐射导引头在不同时刻的瞄准点散布图
如图3—4所示,在末制导攻击阶段,随着无人机不断接近诱饵,各辐射源相对反辐射导引头的方位夹角与俯仰夹角都在不断增大,反辐射无人机飞行航迹存在明显的摆动;从导引头在反辐射无人机不同攻击阶段的瞄准点也能看出,初始阶段反辐射导引头的瞄准点涵盖4个辐射源目标,随着反辐射无人机临近,瞄准点开始逐渐转向单个诱饵,且受闪烁诱偏影响,导致机体在不同诱饵间不断调整指向角,并最后朝着诱饵2进行攻击,但因反辐射无人机过载且调整时间较少,最终落点位于诱偏系统中部区域,未造成对雷达或诱饵的有效毁伤。
4 结束语
反辐射无人机作为一种成本较低、滞空时间长和攻击高效的雷达摧毁武器,在作战突防中对雷达和雷达操作手具有重大威胁。本文针对诱偏反辐射无人机的工作机理,根据长期有源诱偏对抗经验,分析了闪烁诱偏抗反辐射无人机策略,尤其是对功率闪烁和时序闪烁的综合运用做了研究和仿真,为诱偏反辐射无人机提供了参考。在实际作战中,还应结合雷达组网、分布式导航干扰和防空武器系统等多种措施进行战术战法综合运用,从而提高成功对抗反辐射无人机的概率。
猜你喜欢
科普童话·神秘大侦探(2022年4期)2022-05-26
作文小学高年级(2022年2期)2022-03-03
数字通信世界(2019年8期)2019-02-13
航天返回与遥感(2018年5期)2018-11-12
光学精密工程(2016年5期)2016-11-07
现代防御技术(2016年1期)2016-06-01
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
火力与指挥控制(2015年4期)2015-06-23
弹箭与制导学报(2015年1期)2015-03-11
