
基于水下滑翔机的水听器阵设计与探测性能分析
2023-10-12 06:03魏阳杰王渊张营刘志武赵洪冰
航天电子对抗 2023年4期
魏阳杰,王渊,张营,刘志武,赵洪冰
(1.中国航天科工集团8511研究所,江苏 南京,210007;2.北京跟踪与通信技术研究所,北京 100094)
0 引言
水下滑翔机具有自噪声低、能耗低、效率高、续航能力强、隐蔽性强等突出优点,一方面可为海洋科学研究、海洋搜救打捞、海底设备布放检测维修回收、海洋资源开发与利用等提供支撑;另一方面方面可用于海洋军事目标(例如敌潜艇、舰船、水下无人探测平台)的探测和侦察,为情报搜集等提供支撑。与浮标和潜标等无人平台相比,水下滑翔机具有优越的机动性、可控性和高效性,无需专门的动力系统,成本低廉,适合大规模组网应用,构建水声侦察网。因此,水下滑翔机特别适宜用于水声侦察领域[1-3]。
1 作用对象分析
1.1 主动声纳信号
主战舰艇需要装备主动声纳用于探测、攻击以及导航等,从而会辐射出主动声纳信号。
驱逐舰安装的主动声纳典型型号为美国海军“伯克”级导弹驱逐舰装备的AN/SQS-53C型综合主战声纳以及英军42型导弹驱逐舰装备的2050/2016型综合声纳。护卫舰安装的主动声纳典型型号为美国海军“佩里级”级护卫舰装备的AN/SQS-53B型综合主战声纳。主动反潜浮标也会产生主动声纳信号,其典型代表为美军的SSQ-62E型主动声源浮标。以上声呐主要技术参数如表1所示,其中SSQ-62E型主动声源浮标声源级≥200 dB;工作深度含27 m、120 m、460 m三档可选。舰艇主战声纳的效率一般在0.2~0.7之间,方向性指数一般在10~20 dB之间,则对于150 kW功率声源,当效率为0.2时可计算其声源级的上限与下限分别为:
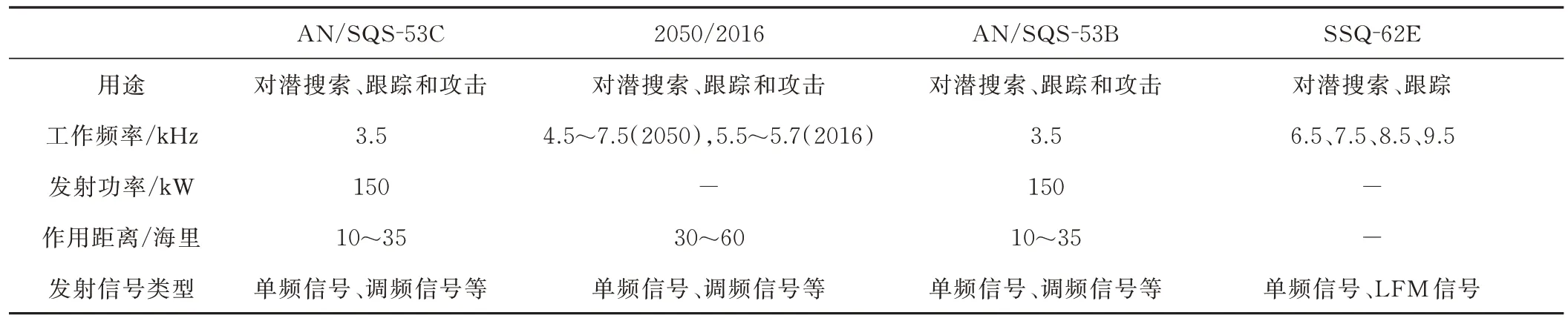
表1 各型号主动声呐技术参数
当效率为0.7时可计算其声源级的上限与下限分别为:
1.2 水声通信信号
有时为了水声通信的需要,潜艇、水下无人平台等通常会装备用于水声通信的主动声纳设备,国外常用的水声通信装备的通信距离大于3 km,典型的工作频段为2~30 kHz,信号形式有扩频信号、MFSK信号、MPSK信号以及OFDM信号等,信号形式类型较丰富。水声通信设备的声源级一般都比较大,一般≥170 dB(10 kHz)。
1.3 辐射噪声信号
任何船舰在运行时,主机和辅机都一直在运作,而且船体的其他结构部件由于机械振动都会产生噪声,通常意义下船舰辐射噪声分为3个大类:机械噪声、螺旋桨噪声和水动力噪声。
1) 机械噪声是船舰低速航行时的船舰噪声的主要成分。船舰旋转的不平衡部件、重复不连续工作的部件、往复部件,这些部件所产生的噪声均为有线谱噪声,其主要成分就是振动基频及其谐波分量。其他机械噪声还有各种管道、泵管中流体所产生的空化、排气以及轴承、轴颈上机械部件等产生的连续谱噪声。总的来说,机械噪声是构成船舰噪声的低频部分,其中推进系统的辐射噪声具体表现为强线谱和弱连续谱的叠加,这些线谱的幅度和频率都与船速相关。而辅机部分所产生的线谱与航速无关,其线谱的幅值和频率都表现得相对稳定。
2) 螺旋桨噪声是由螺旋桨自身振动和在水中旋转所产生的噪声,与机械噪声类似,螺旋桨噪声也会产生连续谱以及线谱噪声。
3) 水动力噪声是不规则水流作用于船舰后产生的噪声。大多数情况下,水动力噪声对船舰辐射噪声的贡献不大,通常都被淹没在机械噪声和螺旋桨噪声中,但在某些特殊情况下,比如当空腔被激励成线谱噪声的共振源时,水动力噪声就会成为主要的噪声源。
通过前面的分析可以发现船舰辐射噪声其实就是由连续谱和线谱叠加而成,其有如下的特性:
1) 续谱噪声主要由机械噪声,螺旋桨噪声和水动力噪声共同产生。连续谱的主要频段可以从几赫兹到数万赫兹,在低频段是以6~12 dB/倍频程的正斜率增加,而在高频段是以-6 dB/倍频程的负斜率下降,其中谱峰值一般出现在100~1 000 Hz之间。
2) 线谱主要分布在辐射噪声的低频部分,少数情况会出现在1 000 Hz附近。线谱的频率较为稳定,且有一定的规律。
3) 声级随距离的衰减量一般与水深和海底介质有关,但在远场时一本近似为6 dB/倍频程。
典型潜艇目标的辐射噪声级总结如图1所示,并定义噪声潜艇的源级为140 dB,安静型潜艇的源级为120 dB,极安静型潜艇的源级为100 dB[3]。
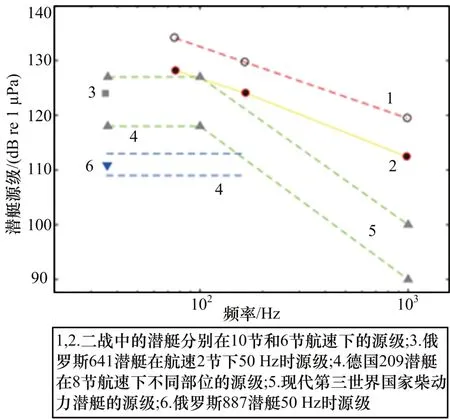
图1 典型潜艇目标的辐射噪声级
2 基于水下滑翔机的水听器阵设计
由于矢量水听器通常适合用于低频段的水声侦察,且在运动平台上应用效果不佳,所以为了兼顾对目标海域低频以及中高频水声信号进行全向侦察,采用高灵敏度、小型化标量压电陶瓷型水听器进行组阵,同时结合功耗以及水下滑翔机的外形特点,设计水听器阵,如图2所示。
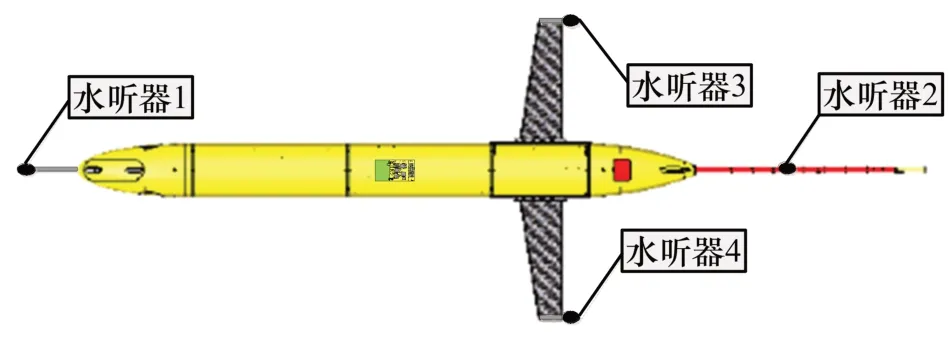
图2 基于水下滑翔机水听器阵结构示意图
3 水听器阵探测性能分析
3.1 作用距离分析
仿真中假设海底为平坦海底,海深1 000 m,海水密度为1.6 g/cm3,声速分布采用典型munk声速分布如图3所示。
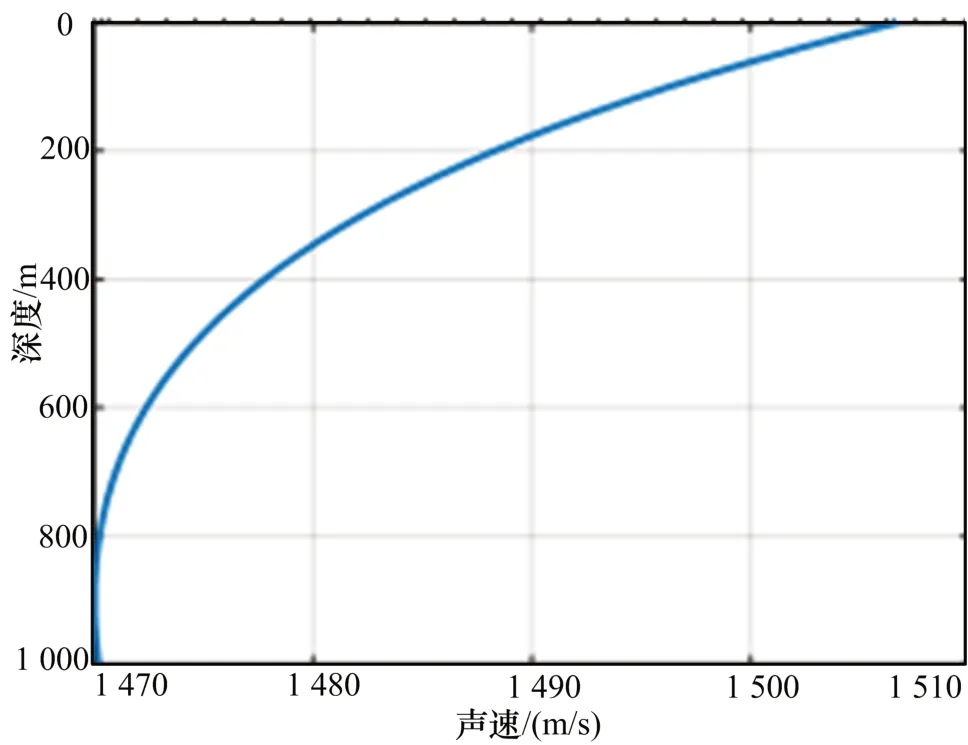
图3 munk声速分布图
假设声源深度100 m,利用BELLHOP射线声学模型,当声源为230 dB@3 kHz的主动声纳目标时,计算其传播损失与FOM之间的对比,如图4所示。可以看出,在本文仿真的海洋环境下,本文水听阵系统对典型声源级为230 dB@3 kHz的舰艇主战声纳目标的最大作用距离超过100 km。
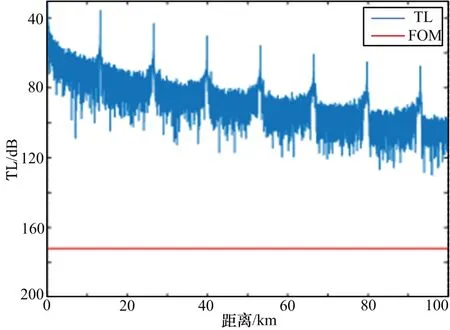
图4 声源频率为3 kHz时侦察距离分析
设声源深度100 m,利用BELLHOP射线声学模型,当声源为170 dB@10 kHz的水声通信声纳目标时,计算其传播损失与FOM之间的对比,如图5所示。可以看出,在本文仿真的海洋环境下,本文水听阵系统对典型声源级为170 dB@10 kHz的水声通信声纳目标的最大作用距离超过15 km。
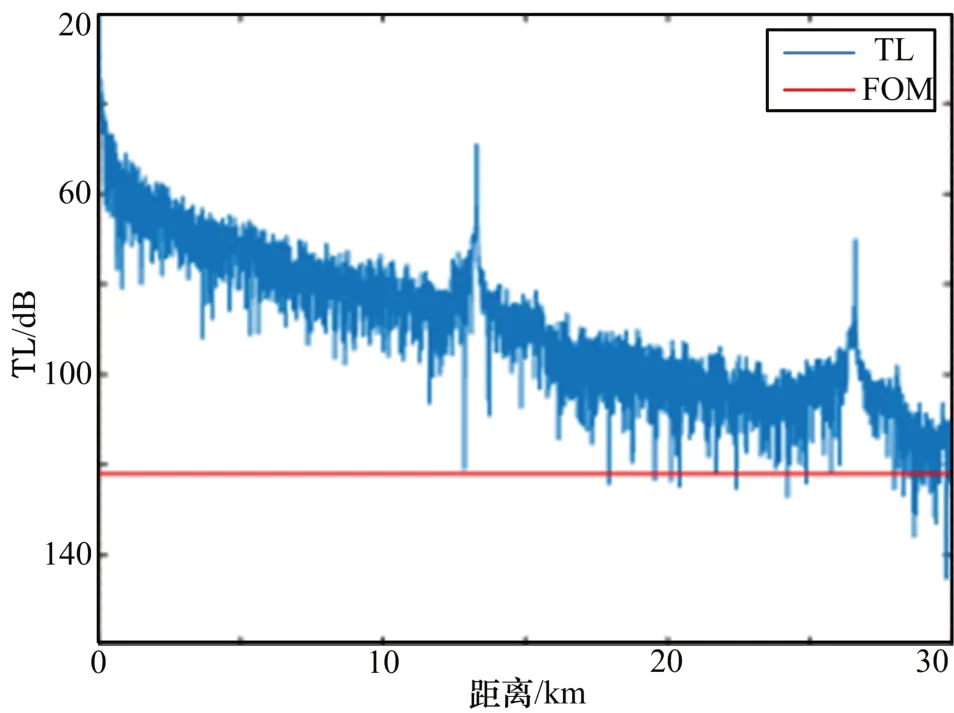
图5 声源频率为10 kHz时侦察距离分析
同理对于辐射噪声的侦察,假设声源深度100 m,采用简正波模型,当声源为140 dB@100 Hz噪声潜艇辐射噪声目标时,计算其传播损失与FOM之间的对比,如图6所示。可以看出,在本文仿真的海洋环境下,本文水听阵系统对噪声潜艇目标的最大作用距离超过9 km。
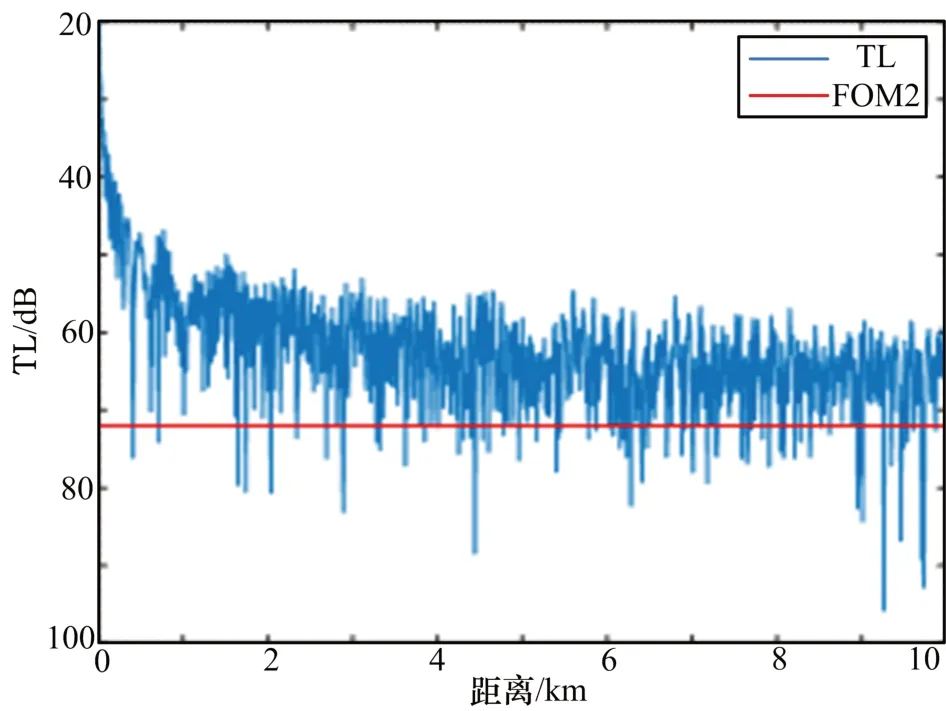
图6 声源频率为100 Hz时侦察距离分析
3.2 测向性能分析
水下听阵系统采用波束比幅测向体制,出于计算量以及测向精度的考虑,在水平方向预成16个波束,覆盖水平方向0~180°。当入射角度为90°、侦察频率为1 kHz时,仿真其波束图如图7所示,其主瓣宽度大约在33°左右,仿真得到的16个波束的覆盖图如图8所示,可见其满足相邻波束之间3 dB覆盖,满足使用要求。
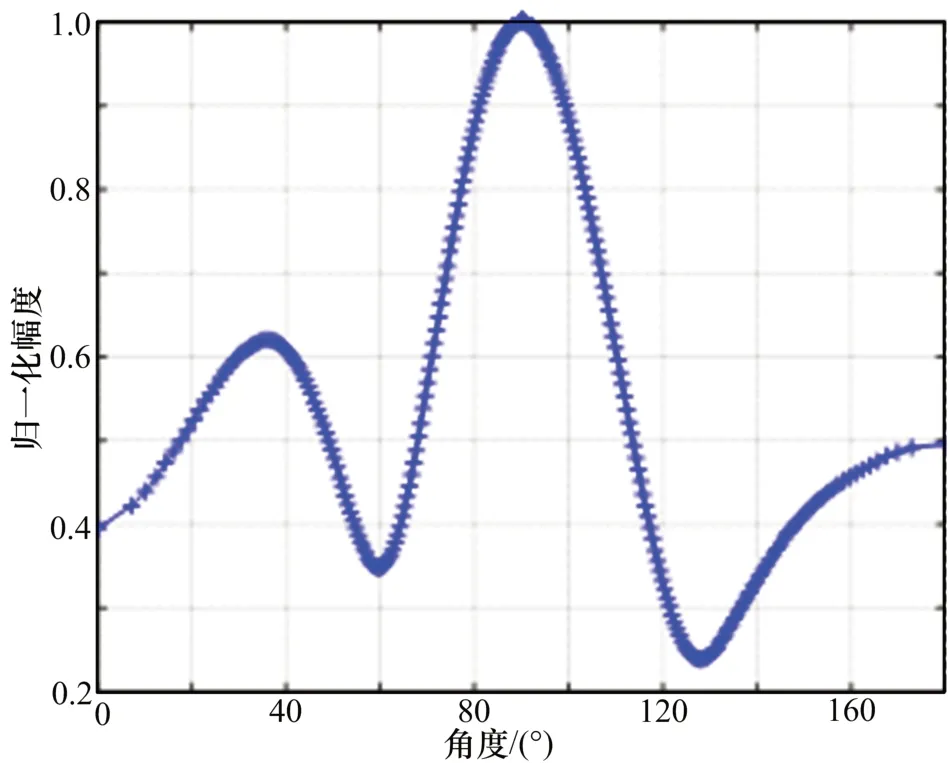
图7 入射角度为90°波束
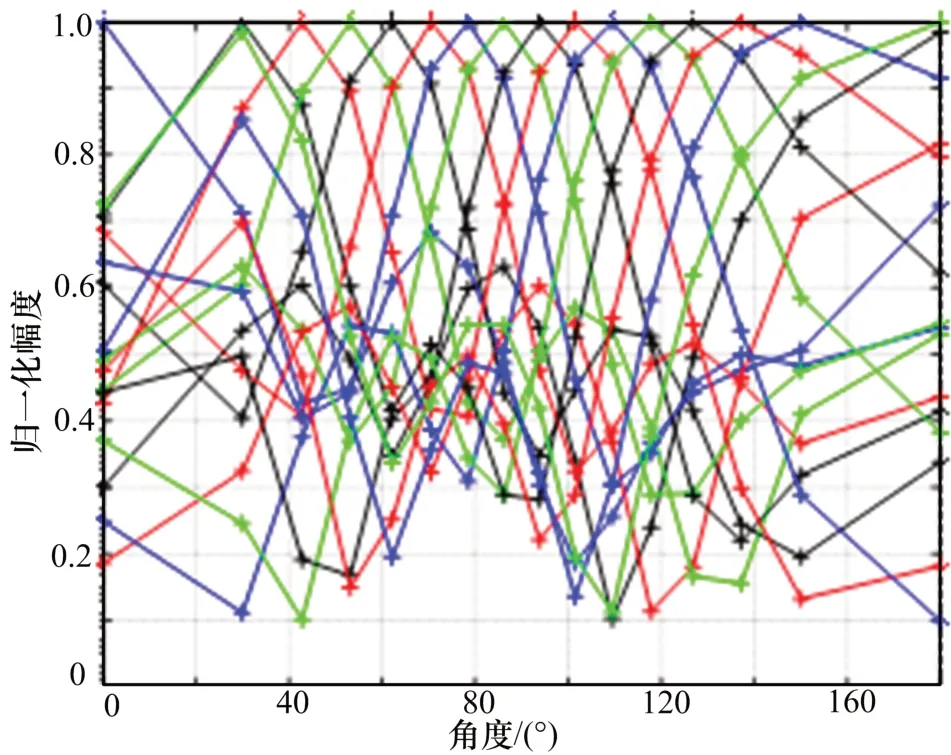
图8 水听器阵16波束覆盖图
4 结束语
本文设计了一种基于水下滑翔机的水听器阵,并详细分析了该阵的性能,通过分析可知,当侦察频率为1 kHz时,该阵的方位分辨率在33°左右。同时通过对基于水下滑翔机的水听器阵性能分析可知,其对声源级230 dB@3 kHz主动声纳信号的有效作用距离最大可达100 km以上,对声源级170 dB@10 kHz水声通信信号的有效作用距离最大可达15 km以上,对声源级140 dB@100 Hz辐射噪声信号的有效作用距离最大可达9 km以上,系统性能良好。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
应用声学(2020年2期)2020-06-08
看世界(2019年16期)2019-08-12
知识就是力量(2019年7期)2019-07-01
军事文摘(2018年24期)2018-12-26
小学科学(学生版)(2018年12期)2018-12-19
凤凰周刊(2016年17期)2016-09-02
舰船科学技术(2015年8期)2015-02-27
中国舰船研究(2014年6期)2014-05-14
舰船科学技术(2014年5期)2014-03-08
