
无人机倾斜摄影测量像控点布设精度控制方法研究
2023-10-20 09:08武晴晴
机械设计与制造工程 2023年9期
靳 洁,武晴晴
(1.陕西工业职业技术学院土木工程学院,陕西 咸阳 712000) (2.咸阳市数字城市与地理空间大数据技术重点实验室,陕西 咸阳 712000)
无人机倾斜摄影测量方法在测绘领域的应用极为广泛,利用该方法可跨越地形障碍[1],快速获得测绘区域图像,为建筑施工、地质勘探等提供地形数据支持。在利用无人机倾斜摄影测量地形时,需要在地面布设测量像控点[2-3],如果测量像控点布设不合理或者偏差较大,则测量的地形结果不够精准,严重影响后期施工或者地质勘探工作的顺利进行[4],因此对无人机倾斜摄影测量像控点布设精度进行控制意义重大。很多学者对像控点布设精度控制方法进行研究,如蓝贵文等[5]提出无人机倾斜航行布设方法,该方法通过对角交叉和折线飞行方法采集目标位置图像,以该图像为基础分别建立不同飞行方式采集的目标位置图像的三维实景模型,再分析三维模型精度,以模型精度最高的采集方式作为像控点布设方法,由此实现无人机倾斜摄影测量像控点布设精度控制;许承权等[6]采集目标位置图像后,利用影像双边滤波方法去除其含有的干扰噪声,再利用最小显著差异(least significant difference,LSD)算法提取图像边缘后,依据距离、长度等筛选最外沿直角边,直角交叉位置则为像控点位置,由此实现像控点布设精度控制。上述两种方法虽均可实现像控点布设精度控制,但二者在实际应用中均存在像控点布设精度控制不足的情况。
本文研究畸变校正后的无人机倾斜摄影测量像控点布设精度控制方法,为地形测绘、地质勘探等提供技术支持。
1 无人机倾斜摄影测量像控点布设精度控制方法
1.1 图像采集与畸变校正预处理
利用无人机搭载CCD相机倾斜摄影采集目标图像,使用自适应网格方法建立目标模型,然后设置测量步长,以地心坐标系为基础[7]划分无人机倾斜摄影地形网格,得到无人机倾斜摄影空间位置分布集,依据该分布集建立大范围球面弧形,得到无人机倾斜摄影规划模型如下:
P={U1,U2,U3}
(1)
式中:P为无人机倾斜摄影规划模型,U1、U2、U3为空间位置分布密度特征量。
依据几何轨迹跟踪方法,计算无人机倾斜摄影的凸特征点集分布,公式如下:
(2)

对式(2)结果进行重组后,得到目标区域激光图像采集模型g(x,y),公式如下:
(3)
经过上述步骤,得到目标区域图像集。由于地质勘探、测绘区域的地形较为复杂[8-9],且照度条件不同,采集的图像可能会出现畸变,严重影响测量像控点布设精度,因此需对采集的目标区域图像进行畸变校正。
目标区域图像的畸变分为径向畸变和切向畸变,主要来源于相机镜头的机械、光学误差和A/D转换的电学误差[10]。假设目标区域图像的中心畸变为0,像素点用(u,v)表示,则其畸变值ε计算公式为:
(4)
当式(4)结果为0时,目标区域图像的畸变函数值也为0。由于畸变函数是关于像素点到图像中心距离径向对称的,因此ε奇数次幂的项均为0,则目标区域图像的径向畸变计算公式为:
(5)
式中:Δxε、Δyε分别为x、y方向的坐标径向畸变偏移量,b1、b2均为径向畸变参数。
相机透镜和隧道平面之间的非平行性导致了目标区域图像的切向畸变,其切向偏移量计算公式为:
(6)
式中:Δxt、Δyt分别为x、y方向的目标区域图像切向坐标偏移量,ξ1、ξ2为切向畸变参数,x、y为坐标值。
依据式(5)、(6)可计算目标区域图像畸变总和,其公式为:
(7)
式中:Δx、Δy分别为x、y方向的坐标方向畸变总和。
通过调整式(5)、(6)内径向畸变和切向畸变参数,使式(7)结果为0,完成目标区域图像畸变的校正。
1.2 自动布设测量像控点方法
将校正畸变后的目标区域图像导入到Inpho软件中建立金字塔影像,再按照二维激光雷达校验参数,得到目标区域航带影像缩略图[11],选择航带上任意位置,激活航带ID号后,得到无人机倾斜摄影测量网型;再利用Inpho软件自动匹配像片同名点,实现同名点连接,通过自由网平差来计算同名点之间的相对位置关系[12]。
将目标区域图像相对位置关系导入到AutoCAD软件中,利用无网格法进行模拟计算。测量像控点自动布设规则为:将一个已知节点作为父节点,以其为圆心,以父节点位置节点密度为半径画一个圆[13],将圆周分为6等份,然后判断新生成的节点是否合理,将不合理的节点删除,如此重复操作,得到测量像控点自动布设的派生子节点。测量像控点自动布设规则如图1所示。

图1 测量像控点自动布设规则
依据测量像控点自动布设规则得到无人机倾斜摄影测量像控点后,计算派生的子节点与其他节点的最小距离:
(8)
式中:L(p,i)为节点p和i的距离函数,p为新派生的子节点,i为除父节点以外的任意节点,α为调节系数,Ψ(·)为网格密度函数,Ω为目标区域图像自由网。
为控制测量像控点之间的距离,对自动布设的无人机倾斜摄影测量像控点的密度进行控制,在此引入节点密度控制函数。目标区域图像自由网内任意点p的网格密度函数公式为:
(9)
式中:N为除父节点之外的节点总数,di为p和i之间的距离。
完成测量像控点之间的距离调整后,借助Google Earth平台对布设好的无人机倾斜摄影测量像控点进行微调[14-15],得到初始无人机倾斜摄影测量像控点分布图像。
1.3 刺点范围自动匹配
将绣花针垂直于初始测量像控点分布图像正面,权属界线拐弯明显的物点影像上的刺孔作为刺点,依据刺点和地面地物之间的空间映射关系,对刺点坐标进行匹配处理,匹配过程如下。
令S-uvw、D-XYZ分别为空间坐标系和地面摄影测量坐标系,使该两个坐标系坐标轴彼此平行。无人机倾斜摄影中心和地面点在测量坐标系内的坐标分别为XS、YS、ZS和X、Y、Z,地面摄影测量点A在空间坐标系和另一个空间辅助坐标系的坐标分别为(x,y,-f)和(U,V,W),则刺点a在像空间坐标系和空间辅助坐标系内关系表达式为:
(10)
式中:R为旋转矩阵,ri、qi、gi(i=1,2,3)均为方向余弦。ri、qi、gi计算公式如下:
(11)
(12)
(13)
式中:τ、ω、φ分别为偏航角、俯仰角和翻滚角。
由式(11)~(13)可知,像控点原点、地面摄影测量点和像点为三点共线关系,依据三角形相似性,三点之间关系表达式为:
(14)
式中:λ为比例因子。
将式(14)改写成矩阵形式:
(15)
由式(10)~(15)计算得到空间辅助坐标系的x坐标值和地面点在测量坐标系的Y坐标值:
(16)
无人机倾斜摄影像控点布设精度控制程序为:将布设后的像控点文件导入到刺点范围自动匹配程序内,利用公式(16)反复计算每个无人机倾斜摄影测量像控点分布图像上的像点坐标,然后将像点最接近图像中心的图像作为刺点图像,再依据设置的半径勾勒刺点范围,由Inpho软件自动对无人机倾斜摄影像控点图像进行标注,完成像控点布设精度控制。
2 性能测试与分析
以某建筑所在区域地形测绘项目作为实验对象,使用本文方法对该地形测绘项目的像控点布设精度进行控制,验证本文方法实际应用效果。
首先用经典黑白格图像进行实验,验证本文方法对其进行畸变校正处理的结果,如图2所示。由图2可知,本文方法可有效对切向畸变和径向畸变的图像进行校正处理。
然后利用本文方法对实验对象测量像控点进行自动布设,结果如图3所示。

图3 测量像控点进行自动布点
由图3可知,利用本文1.1节和1.2节中的技术,可有效对该测绘项目无人机倾斜摄影图形的测量像控点进行布设,但部分区域测量像控点分布过于密集。继续利用1.3节技术对分布密集的像控点进行调整,结果如图4所示。由图4可知,调整后的测量像控点分布较为均匀。由此证明,本文方法可有效控制测量像控点布设密度,也从侧面印证本文方法对无人机倾斜像控点布设精度控制得较好。

图4 测量像控点密集控制结果
以进行密度控制后的图4所示的测量像控点的图像作为实验对象,使用本文方法自动匹配其刺点范围,结果如图5所示。分析图5可知,利用本文方法可有效匹配无人机倾斜摄影测量像控点刺点范围,且刺点匹配范围均在该测绘项目地形范围内,该结果说明本文方法匹配测量像控点刺点范围精度较高。
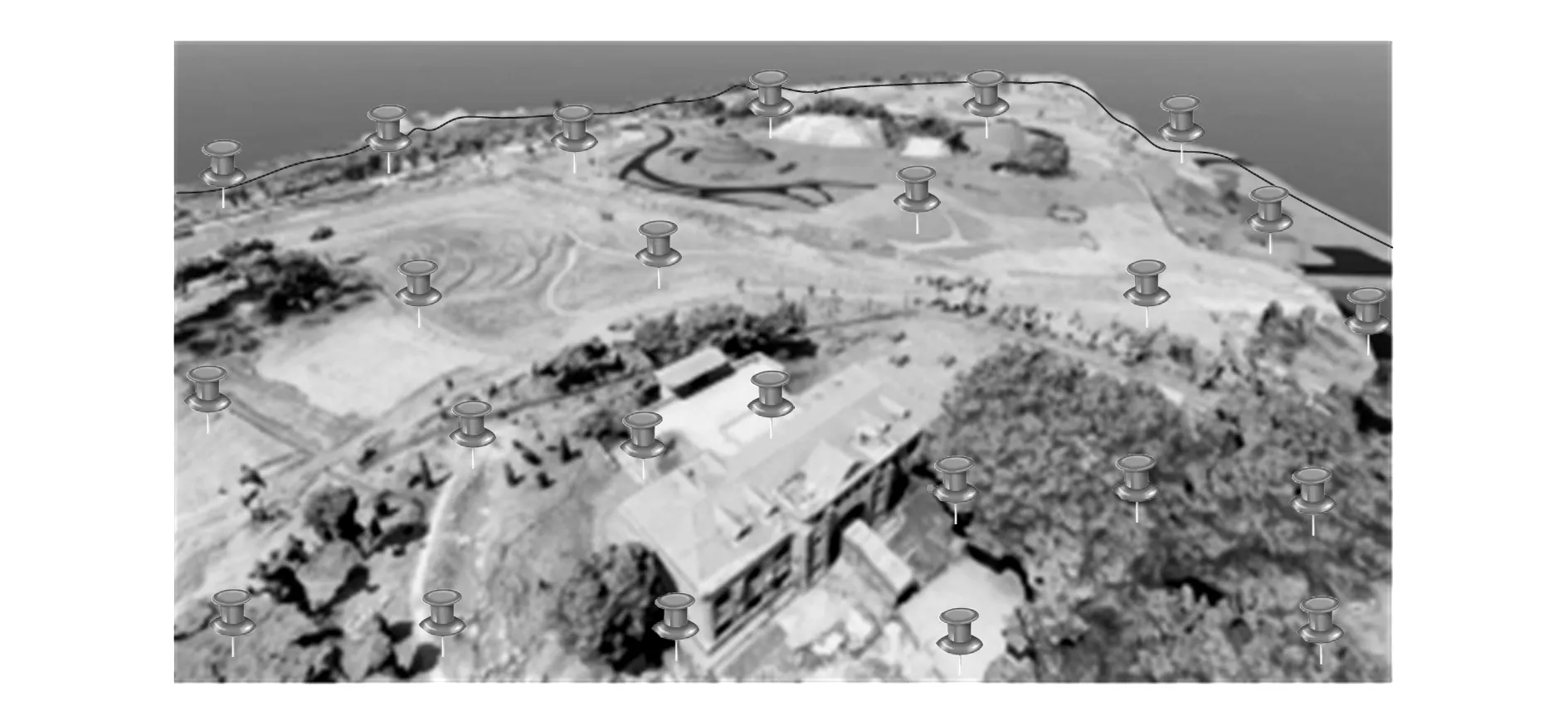
图5 测量像控点刺点范围匹配结果
为了验证本文方法控制无人机倾斜摄影测量像控点的能力,预先设置该测绘项目像控点,再利用本文方法对像控点布设精度进行控制,将所得结果与预设像控点进行对比,结果如图6所示。由图6可知,利用本文方法进行精度控制后,仅有1个控制后的像控点与预设像控点没有重合,其他像控点与预设像控点均重合,说明应用本文方法可控制测绘项目无人机倾斜摄影像控点布设精度。

图6 像控点布设精度控制结果
进一步验证本文方法控制无人机倾斜摄影像控点布设精度的能力,以20个像控点作为实验对象,使用本文方法控制其精度后,分析控制后的精度在X轴和Y轴两个方向上的误差值。为使实验结果更能充分说明问题,同时使用文献[5]方法和文献[6]方法进行实验,对比结果如图7所示。由图7可知,本文方法可将像控点布设精度控制在-1~1 m,而文献[5]方法和文献[6]方法控制像控点布设精度较差,尤其是文献[5]方法,其像控点布设精度为-3~3 m。综上所述,本文方法控制的无人机倾斜摄影像控点的误差值最小,应用效果较好。

图7 像控点布设精度控制测试结果
3 结束语
无人机倾斜摄影是测绘、测量等领域应用较为广泛的测量方式,但当其像控点设置不合理时,会导致其测量结果出现偏差,本文提出了无人机倾斜摄影测量像控点布设精度控制方法,通过图像校正、像控点自动布设等多个步骤实现像控点布设精度控制。经实验验证,结果显示该方法具有较强的可行性。
猜你喜欢
西部论丛(2019年9期)2019-03-20
戏剧之家(2018年27期)2018-12-10
文艺生活·中旬刊(2018年7期)2018-09-28
电子制作(2018年11期)2018-08-04
摄影之友(影像视觉)(2017年10期)2017-11-07
中文信息(2017年6期)2017-06-30
测绘科学与工程(2016年5期)2016-04-17
电子设计工程(2015年3期)2015-02-27
癌变·畸变·突变(2014年2期)2014-03-01
河南科技(2014年14期)2014-02-27
