
化肥农药智能喷洒机器人系统的研究
2023-10-24 07:34胡宁峪莫名韶黄宇婧韦雅曼邹颖丰
装备制造技术 2023年8期
胡宁峪,莫名韶,黄宇婧,韦雅曼,莫 莉,邹颖丰
(1.南宁职业技术学院,广西 南宁 530008;2.广西广播电视技术中心,广西 南宁 530022)
0 引言
在现代农业的领域中,传统的农田农药化肥喷洒作业方式多为固定式喷洒,不仅效率低、功能简单,且劳动成本高,无法高效推动农业现代化发展。随着科学技术的不断发展,控制技术、导航技术及检测技术等方面的进步,通过提高农业生产装备的智能化水平已经成为当前农业工程的发展趋势[1]。将智能控制技术应用到农业生产,通过深入研究移动机器人及喷洒装备相关技术,帮助农民找到高效而可持续的办法。
在农业生产过程中,劳动者通常使用无人机对农田进行农药、化肥或除草剂的喷洒,以避免直接接触农药,不仅安全还能降低劳动强度;同时,通过对喷洒机器人喷药量的精确控制,还能提升效率及作业质量,减轻对环境的污染,实现精准施肥施药。虽然目前应用无人机进行农药化肥喷洒技术应用越来越广泛,但无人机进行施肥施药具有购买成本高、维护成本高、危险系数高、操作人员需要有很强的专业知识和较高的飞行器控制技能以及无法应用大棚种植领域等缺点。
针对上述无人机喷洒缺点进行农药化肥智能喷洒机器人系统研究。通过设计出以蓄电池作为电源,使用电动机为动力的农业智能喷洒机器人模型,深入研究并设计机器人行走系统、导航系统及喷洒系统等模块,将计算机技术、传感器技术、GPS 技术、数据通讯技术等集成在该喷洒机器人上,实现可在无人干预的情况下根据规划的路径,自主完成农作物农药和化肥的喷洒作业。
1 系统设计思路
农药化肥智能喷洒机器人主要由RTK 定位系统、导航控制系统、喷洒控制系统、行走机构系统、传感器系统、可旋转喷洒系统、农药储料箱及电源等模块组成。喷洒机器人可在田间通过RTK 定位系统实现对预设路径的自动定位和导航,通过行走机构自行在田间行走。通过传感器系统实现对农药储料箱的液位进行监测,可旋转喷洒系统可在喷洒控制器系统的控制下实现360°旋转喷洒农药。电源部分通过可蓄电池,实现对喷洒机器人各个用电模块的供电。
1.1 定位系统
对于定位系统,目前常用的定位系统为GPS,但普通GPS 的定位精度大于1 m,信号误差有50%的概率会达到2 m 以上。另外,GPS 的定高不够精确,误差可能高达十几米。为了提高智能喷洒机器人的定位精度,本设计采用目前在无人驾驶车辆中被广泛应用的RTK 定位技术,即载波相位差分技术。RTK 定位技术能够实时地提供测站点在指定坐标系中的三维定位结果,对位置的测量能够实现实时动态检测,达到厘米级精度[2]。通过这种方法将GPS 定位精度由原来的米级提高到厘米级。图1 所示为RTK 技术原理图。

图1 RTK 技术原理
通过将RTK 技术应用到喷洒机器人的定位系统中,可以实现对喷洒作业位置的准确监控,只有这样,才能让喷洒小车精确行走于田间,提高喷洒的准确性和有效性。
1.2 导航控制系统
作为喷洒机器人中枢部分的导航控制系统,主要负责引导喷洒机器人的移动、控制和协调各个子系统工作。研究内容为根据需求确定一个高精度、低成本的导航系统方案,使喷洒机器人能实现根据规划的路径自主完成喷洒作业,并能根据环境及自身状态自主修正工作状态,保障作业的顺利进行。另外还需要根据上诉需求确定一个性能满足要求、稳定可靠的硬件平台。其主要功能为:
(1)实现多种控制功能,可人工操作、智能控制、远程控制。
(2)实现路径规划功能,可以将数据调用。
根据上诉设计思路,导航控制系统的设计以APM 开源飞行控制软件为基础,结合设计需求进行二次开发,以Pixhawk 飞控作为导航控制系统,搭载STM32F427 作为控制核心。整个导航控制系统包含Pixhawk 控制模块、基于RTK 技术的导航模块、数据传输模块及遥控器模块等。其软件为APM 开源飞行控制软件。
1.3 行走机构系统
作为整个系统的基础部分,行走机构系统部分主要研究的是选用何种形式的行走机构,以达到在田间能够平稳、灵活和高效的移动且对作物影响最小这一目的[3]。其主要功能如下:
(1)机械结构满足行走、转弯、后退,越障后所需要的动力。
(2)机械结构满足受力强度。
(3)机械结构实现适应不同的田间垄的间距。
对于行走机构,在研究各种行走机构的优缺点后,本设计采用四轮轮毂搭载机架作为行走机构,通过两轮毂差速进行转向,该方案的优点在于车轮在田地里通过性更强。同时,差速转向可实现零半径转向,且控制简单。
1.4 传感器系统
传感器系统用于获取机器人自身及周围环境的状态,主要功能是确定机器人系统正常作业需要收集的自身及环境状态,以及采集这些状态需要使用何种传感器。具体功能如下:
(1)地形检测,能够测量作业区域的路径并记录。
(2)运行状态检测,能够检测出机器人的运行速度和加速度。
(3)检测电量的功能。
1.5 喷洒系统
喷洒系统的研究内容为分析大多数作物的形态,以增加喷洒作业的高效与经济性为目标,确定喷洒系统的机械结构、药物的喷洒密度和覆盖范围。具体功能如下:
(1)自动实现喷洒,喷头可进行360°旋转。
(2)操作简单方便,成本低。
(3)性能稳定,结构作业稳定。
针对各系统模块进行设计,如图2 所示为最终智能农药化肥喷洒机器人总体设计架构。
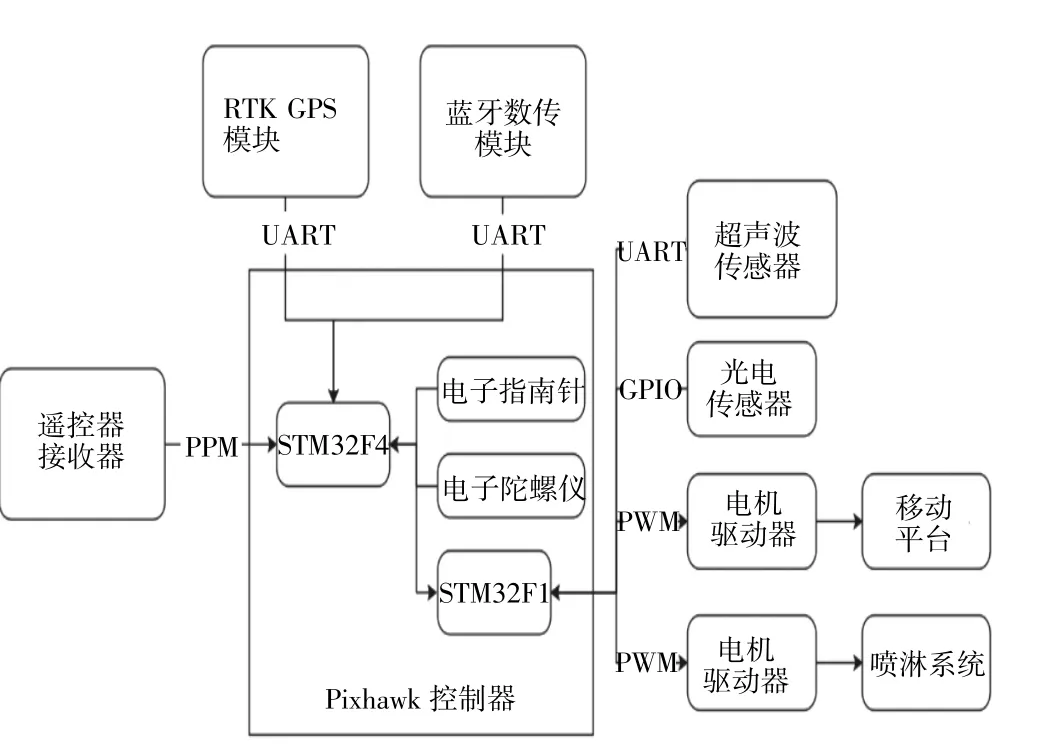
图2 系统总体设计架构
2 硬件电路实现方案
2.1 硬件平台
智能农药化肥喷洒机器人Pixhawk 飞控是由苏黎世理工大学推出来的高性能飞控硬件板,板上搭载了STM32F4 系列高性能32 位单片机以及陀螺仪和电子罗盘等传感器,同时有丰富的外部接口,可用于连接GPS 模块、通用遥控器、舵机和电机等丰富的外部设备,配合APM 飞控程序实现喷洒小车的手动控制和自动导航控制。
2.2 RTK 导航
采用赫星Here3 RTK 导航定位模组,该模组由移动站和基准站组成。如图3 所示为模组采用高可靠载波相位差分技术,可消除星历误差、电离层误差、对流层误差、星间钟差等多种测量误差等。基准站的模组,差分接口输出RTCM2.x/3.x 标准数据流。同时提供网络RTK 的参考设计,可通过网络向全部移动站分发差分数据流。模组静态相对定位精度小于1 cm,中等动态相对定位精度小于2 cm,输出速率1~10 Hz,完全满足智能农药化肥喷洒机器人应用场景的需求。

图3 赫星Here3 RTK 导航定位模组
2.3 传感器
智能农药化肥喷洒机器人采用以激光雷达传感器为主的传感器设计方案。激光雷达传感器采用YDLIDAR X3 型旋转式激光雷达传感器。该型传感器可以0.6°的角分辨率,8 m 的探测距离,360°的扫描周围环境中的物体,并反馈回与其的距离,最终形成周围环境的点图供控制器进行判断。激光雷达传感器相较于超声波传感器,具有探测距离远探测范围,物体定位精度高等特点,结合本文智能农药化肥喷洒机器人的实际使用工况,激光雷达传感器能更好地反馈农田复杂的环境信息,有利于智能农药化肥喷洒机器人合理规划前进路线。
2.4 数据通信
为使喷洒机器人能实时的与上位机通信,保证上位机对其状态的监控,本项目采用了蓝牙数传模块HC-05 作为喷洒机器人的数据传输模块,蓝牙无线通信应用广泛,大多数笔记本电脑都支持蓝牙通信。这样在上位机端就无需另外配备接收设备即可与喷洒机器人进行通信。同时,HC-05 模块支持蓝牙串口协议SPP,可直接将其与Phxhawk 上的TELEM 数据口连接,无需附加其他转换设备。上位机方面当PC 与HC-05 配对后,会自动生成一个虚拟的COM 口,Mission-Planner 可直接选择该COM 口与Phxhawk 进行通信。
2.5 遥控系统
智能农药化肥喷洒机器人遥控系统由富斯FSI6 6 通道遥控器及FS-IA6B 接收机组成。如图4 所示为富斯FS-I6 6 通道遥控器,它除基本的油门及3个方向的摇杆外,还包含4 个拨动开关及两个旋钮,支持输出通道自由映射。FS-IA6B 接收机支持6 通道PWM/PPM 输出及电池电压回传等功能。通过该套遥控设备,可以高效的对智能农药化肥喷洒机器人进行手动控制、工作模式切换及紧急工况人为干预等操作。

图4 FS-I6 遥控器及FS-IA6B 接收机
3 软件实现方案
3.1 主控软件
喷洒机器人主控软件采用APM 开源飞行控制软件进行机器人操作系统,该软件支持多旋翼、固定翼、直升机和无人驾驶车等无人设备,支持多传感器数据融合,支持GPS 定位和航线规划等多种功能,上位机上APM 开源飞行控制软件支持MissionPlanner 软件的MAVLINK 通讯协议,可以通过MissionPlanner 对喷洒机器人的各个设备进行监控和配置[4]。APM 飞行控制软件包含大量的可配置参数,可根据被控对象和使用场景灵活设置。
同时由于其是开源程序,可以很方便根据项目需要自行对APM 源代码进行二次开发。本文在APM 原有航点巡航功能基础上,添加了结合激光雷达传感器反馈信息的路径规划功能及农药喷洒控制功能,使智能农药化肥喷洒机器人达到使用要求。
3.2 MissionPlanner
MissionPlanner 是一个功能十分强大的通用无人载具上位机监控软件,支持无人车辆、固定翼无人机、多旋翼无人机等设备。如图5 所示为MissionPlanner软件界面。

图5 MissionPlanner 软件
MissionPlanner 软件可实现对无人车辆、固定翼无人机、多旋翼无人机等设备的固件更新、状态监控以及参数配置等基本功能。此外,MissionPlanner 还具有可视化路径规划功能,可以高效的对所要途径的航点精选标记并下载到设备中。如图6 所示为Mission-Planner 软件航点规划功能。
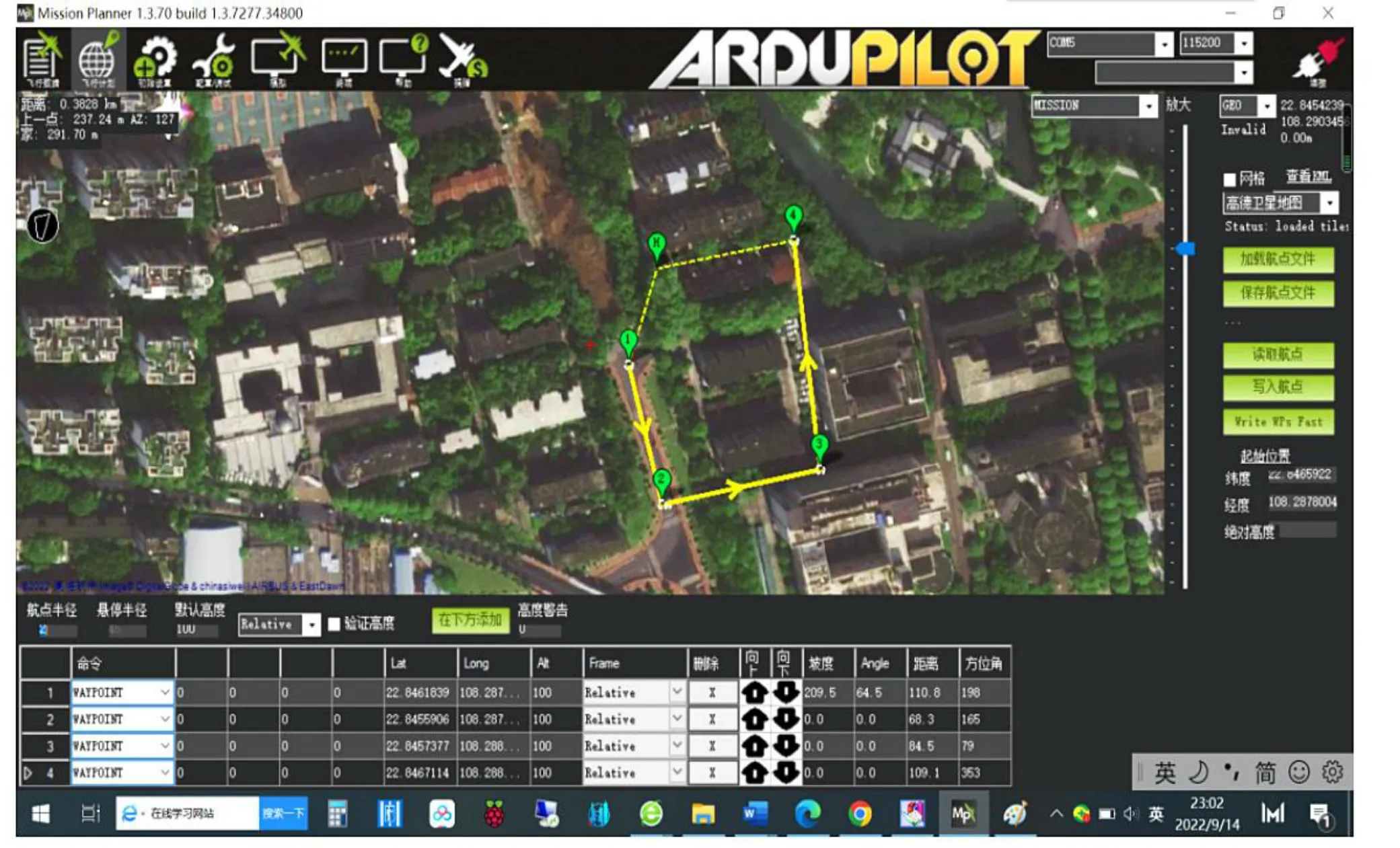
图6 MissionPlanner 软件航点规划功能
4 机械结构设计
喷洒机器人设计过程中不仅需要对设计思路逐个进行理论可行性分析,对于硬件系统还需要进行组装和调试[5,6]。硬件设计是智能保证喷洒机器人能够在田间对作物进行药物喷洒的重要基础,其设计包括机架、轮毂和喷头等部分。其结构设计如图7 所示。

图7 喷洒机器人硬件设计
智能农药化肥喷洒机器人机械结构使用弓形板及机架作为机器人的底部机架支撑部分。为了方便行走于凹凸不平的田间,在机架的两侧分别设置四个轮毂,在机架前端的两个轮毂与驱动电机传动连接,其中驱动电机位于机架的前端的左右两侧,且驱动电机驱动连接减速机,同时驱动电机的壳体海域减速机固定连接;减速机固定安装在两块弓形板之间,减速机的输出轴驱动连接轮毂;机架的顶部固定安装有一个安装架,将喷头设置在安装架的前端,且喷头固定安装在旋转装置上,方便进行范围更广的喷洒。
智能喷洒机器人为前轮驱动,通过驱动电机可以驱动轮毂转动从而带动机器人行走田间,通过舵机驱动喷头的转向,可以在田间对作物进行药物的喷洒。
5 结语
本文选用一块约100 m2的实验苗圃进行测试。测试前先在田间随机位置放置药量测试卡,用于检测喷洒机器人的喷洒覆盖效果。在将该田地测量所得到的相关坐标及路径规划参数导入喷洒机器人后,机器人成功按照预设路径进行了喷洒作业。药量测试卡测试结果显示,喷洒覆盖率达到90%以上,这一结果验证了RTK 定位技术用于农田定位导航的可行性,以及轮式行走机构在田间的通过性。
后续,农药化肥智能喷洒机器人还计划在易用性和通用性相关方向上深入研究,优化人界见面,简化路径规划设置操作,缩短整备时间。同时,将喷洒结构进行模块化改造,设计适配不同种类不同高度的农作物的喷头及相关结构,使其能更加符合现代农业喷洒作业的需求。
猜你喜欢
科教新报(2023年13期)2023-08-15
中国化肥信息(2022年9期)2022-11-25
今日农业(2021年19期)2022-01-12
今日农业(2021年8期)2021-11-28
农业装备与车辆工程(2021年8期)2021-08-28
今日农业(2021年4期)2021-06-09
今日农业(2021年2期)2021-03-19
南方农机(2021年1期)2021-01-20
金桥(2020年9期)2020-10-27
港口装卸(2020年3期)2020-06-30
