
基于Cruise 对某纯电动公交车动力系统匹配与仿真分析
2023-10-24 07:35李慧凯
装备制造技术 2023年8期
李慧凯
(广西申龙汽车制造有限公司,广西 南宁 530299)
0 引言
在全球低碳环保、节能减排压力不断加大的情况下,能够完全实现低污染、零排放的纯电动客车被国际公认为“最有效的新能源客车解决方案”。电动汽车由于采用电能作为动力源,并采用电机驱动,所以电动汽车在使用场景不会产生排放污染,并且运行时振动噪声明显比燃油汽车低很多,而且电动汽车具有良好的操作便利性、维护简便性、高可靠性等。因电动车所具有的以上优点,纯电动公交车在城市客运中已占据主导地位。因此,不同的市场对不同的车型需求日益提高。为降低开发成本,缩短研发周期,缩小研究范围,寻找新的技术突破口,特别是在技术方案的选择阶段,在动力系统和关键零部件的选择上,依靠高效的计算机对系统和关键零部件进行建模、模拟仿真,从而验证方案是否可行并为后续寻找更优方案打下基础。
1 纯电公交车动力总成参数匹配计算
以广西申龙HQK6859 型纯电动公交车开发为例,根据工程经验及以往用户实际使用的需求,在动力总成参数的初步确定上先定驱动电机,然后再合理匹配后桥主减速比、轮胎和动力电池电量以实现车辆兼具良好的动力性与经济性。
1.1 基本参数及设计要求
电动汽车动力匹配的任务是在满足整车动力性能要求的基础上合理选择动力总成中各部件参数,简化系统结构,降低车辆故障率和提高续驶里程。本章通过相关计算完成了纯电动公交车电机性能参数、动力电池参数及传动系参数的匹配设计。HQK6859 型纯电动公交车是在相似车型的基础上更换驱动电机,动力系统采用电机直驱的驱动形式,取代老旧车型带变速箱的驱动形式。其主要包括动力电池、驱动电机、传动轴、主减速器、轮胎。该公交车的动力总成模型总体方案如图1 所示。
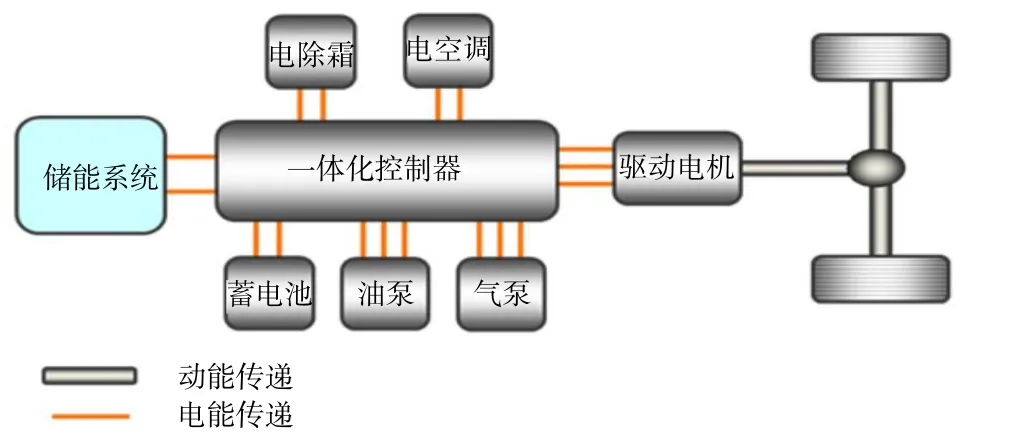
图1 动力总成模型总体方案
而对于整车的主要技术参数,通过借鉴参考车型得出该车型的主要技术参数及性能指标(表1)。
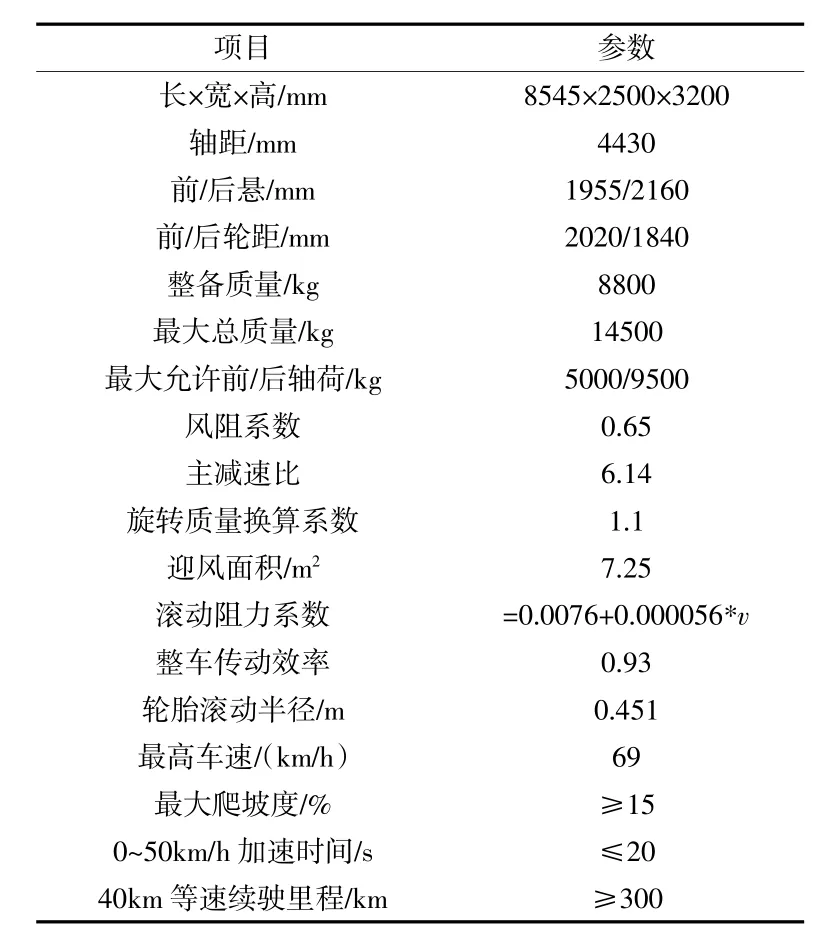
表1 HQK6859 型纯电动公交车整车主要技术参数
1.2 驱动电机参数选择与匹配计算
驱动电机作为电动汽车的动力源,直接影响着电动汽车的动力性和经济性,城市公交车运行工况复杂,对驱动电机要求能够频繁的启动、停止、加速、减速,低速和爬坡的时候要求转矩高,高速时转矩低,并要求宽广的调速范围。电机的选型要素通常包括:电机的类型、额定电压、机械特性、效率、尺寸参数、可靠性和成本等。在基本物理参数定型的基础上通过匹配驱动系统和电子控制系统使电机工作在最佳的性能区间。
1.2.1 驱动电机的峰值功率和额定功率的确定
驱动电机的峰值功率主要由加速时间和爬陡坡(最大坡度)来确定。
(1)一般所谓汽车的爬坡能力,是指汽车在良好露面上客服滚动阻力与空气阻力后的余力全部用来克服坡度阻力时能爬上的坡度[1]。由最大爬坡度确定的峰值功率:
式中:ua为车辆爬最大坡时车速,因电机峰值转矩输出时间普遍较短特性及城市路况设计8%坡度的坡长≤200 m 标准,该车速定为15 km/h;αmax为陡坡角度。
此时峰值转矩Ttqmax为:
(2)由加速时间t确定峰值功率Pmax2:
式中:t为加速时间;ut为汽车加速末速度。
电机峰值功率Pmax需同时满足条件:
(3)最高车速是指在水平良好的路面(混凝土或沥青)上汽车能达到的最高行驶速度。它是汽车油门全开以最高挡行驶时,汽车车速所能达到的极限值,它不能反映汽车实际行驶过程中的平均车速[4,5]。因此应由车辆最高车速vmax确定额定功率PN:
将表1 中的整车主要技术参数代入上式,计算结果为:Pmax1= 99.98 kW,Pmax2= 70.50 kW,Ttqmax≥1639.12 N·m,PN≥55.44 kW,因此电机峰值功率Pmax≥99.98 kW,峰值转矩Ttqmax≥1639.12 N·m,额定功率PN≥55.44 kW。
1.2.2 电机的最高工作转速与额定转速的确定
由最高车速确定电机的最高工作转速nmax:
综合上述计算结果和成本考虑,初步确定的电机参数如表2 所示。
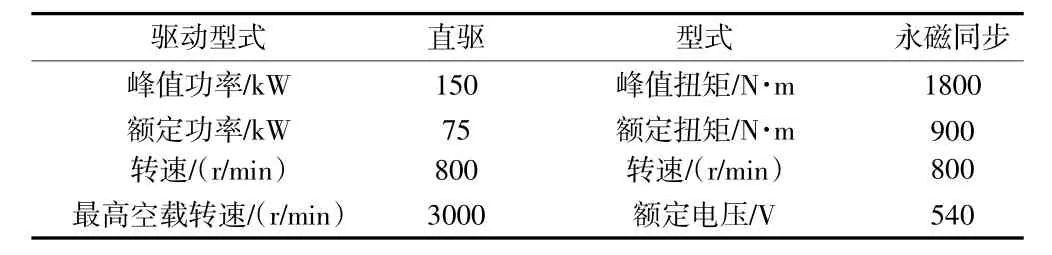
表2 电机基本参数
1.3 动力电池的初步参数选择
动力电池系统是整车的能量来源,为整车提供驱动电能。电池系统的体积、形状和技术参数影响电动汽车的生产装配及行驶性能,是电动汽车的最重要的子系统之一。电动汽车动力电池系统的参数匹配主要包括电池类型的选择、电池组电压和能量的选择。
当车辆以40 km/h 车速在平坦路上匀速行驶时,驱动电机的机械功率P1、输出扭矩T1及此时电机转速n1为:
由P1、T1、n1查阅电机对应的效率MAP 数据可知此时电机的转换效率为95%,结合在整车运行过程中打气泵、空调、转向油泵等主要电器能量损耗约占15%,即可供驱动行驶的电能约为85%;且由于动力电池自身的充放电机制,电量的适用范围为5% ~100%,综上所述动力电池所需电量为= 204.92 kW·h。因此选用宁德时代8 箱CATLSL-L302G01 型动力电池,关键参数见表3。
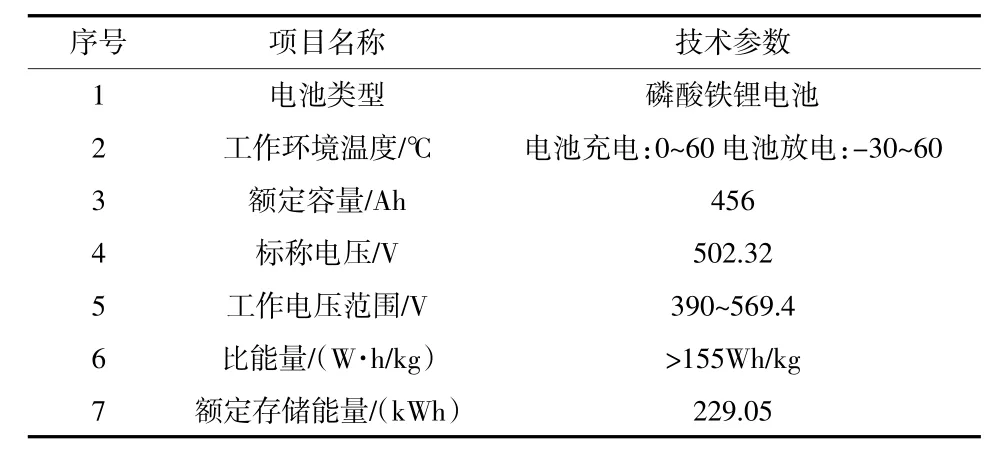
表3 动力电池关键参数
2 AVL CRUISE 模型搭建
AVL CRUISE 提供了一种图形模块化的交互环境,用户可以在已有的模块箱(主要包括Z 整车、离合器、变速箱、发动机、电池、电机、控制器、特殊模块、轮胎等)中选取合适的模块拖放到CRUISE 的工作区,即可快捷简便地建立系统框图,根据研究的需要添加相应的控制模块,并正确连接数据总线,建立各模块之间的联接,包括机械连接、电气连接,便可很快得到系统模型。用户能方便地修改动力传动系的配置,所以用它来对动力传动系统建模将是一件非常轻松的事情。各个模块的仿真参数的设置可以通过Cruise 的参数设置窗口来完成,对一些特性复杂的模块(如电动机),可以在参数设置窗口通过编辑图表曲线建立曲线图来实现参数设置[6]。同时,智能化的驾驶员、驾驶舱模块设置,可以比较充分地体现驾驶员的实际操作意图;还有Matlab/simulink 接口模块,使仿真能完成复杂的逻辑控制。
2.1 搭建整车模型并连接各模块
以HQK6859 型纯电动公交车模型总体方案为基础,从CRUISE 模型箱中将整车、刹车、差速器、主减、电机、电池、电气附件、驾驶舱及其他辅助控制等模块拖至工作区,并对传动系各模块进行物理连接。随后对各模块之间进行信号连接,该步骤是整个仿真过程的难点之一,需对各模块之间的信号传递及控制逻辑较为深入了解才能正确建立汽车各模块之间的信号连接,搭建其整车动力系统模型如图2 所示。
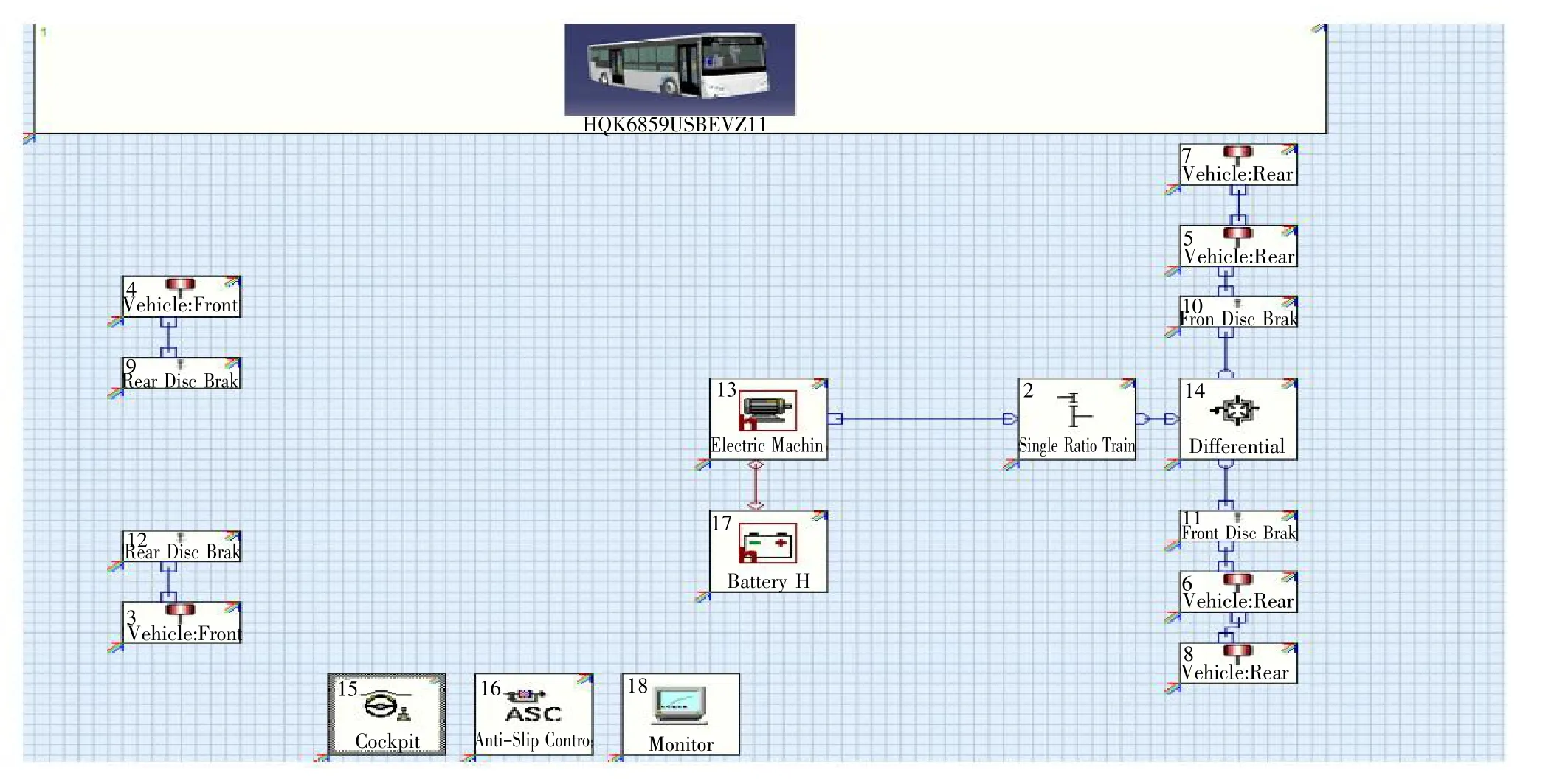
图2 整车动力系统模型
2.2 各模块参数输入
各模块的参数设置在整个仿真中对结果的准确性尤为重要,这将决定Cruise 仿真模型是否具有参考价值。轮胎、制动器、主减速比等模块均有比较成熟的数据,可以直接输入至模块,动力电池因有高压盒存在也不用考虑电池单体电压、容量等参数,电机额定工况、峰值工况下的外特性数据、效率特性数据等可以向电机厂家咨询获取;而整车行驶阻力系数则是数据输入的关键点、难点,经验参数与车辆实际表现的符合程度有待考证,仅在初步理论计算时作为参考。因此特找到换配置前车辆在试验场的滑行数据,对数据进行除异点、插值平滑初步处理后根据运动学特性按公式(8)[7]计算道路等速行驶阻力。
式中:F为道路等速行驶阻力,N;M为试验时车辆总质量,kg;ΔV为与车速V的速度偏差,km/h;T为车辆从V+ ΔV减速到V- ΔV所用时间,s。
在Excel 表格中处理滑行数据并进行二次项拟合出整车行驶阻力曲线见图3。
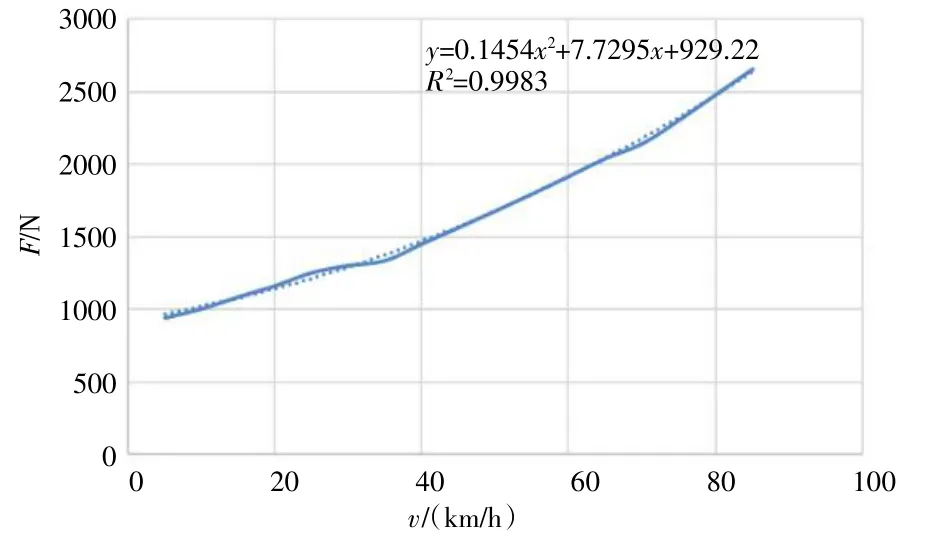
图3 整车行驶阻力曲线
将拟合出的阻力曲线函数各项系数填入整车模块中,“Total Driving Resistance→Resistance Function”中,车辆属性中选择“Driving Resistance:Function without Reference Vehicle”。
而驱动电机的特性参数输入也尤为重要,因配有高压缘故,驱动电机电压稳定得到保证,电机电压仅输入额定电压540 V 时峰值状态的MPa 数据,电机外特性及效率如图4 所示。
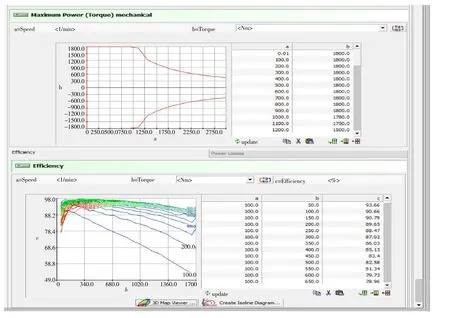
图4 电机外特性及效率
2.3 设定计算任务
在整车各模块搭建完成并输入参数后,即可添加计算任务,根据HQK6859 型纯电动公交车的运营特点及仿真要求,添加如下计算任务:
(1)Brake/Coast/Thrust 滑行(65 ~0 km/h)。
(2)Full load Acceleration 全油门加速(0 ~50 km/h)。
(3)Climbing Performance 最大爬坡度。
(4)Constance Drive 最高车速。
(5)Cycle Run 40km/h 等速续航里程。
其中滑行计算是为与车辆试验场滑行作对比,进一步验证阻力系数的准确性仿真结果与实际滑行相差较小后方可继续进行后续计算项目。所有计算道路及驾驶员均选择标准状态,等速40 km/h 电耗所选择Cycle Run 车速设置通过更改“*.pro”文件实现车速控制。
2.4 计算结果
在搭建好车辆架构、填写好各传动子部件参数及设定好仿真任务后,在计算中心“Single Calculation”开始计算,计算结果如下。
2.4.1 滑行试验
计算前先进行滑行试验,并与道路试验进行对比,65 ~0 km/h 滑行仿真计算结果为1569.63 m,与道路试验1560.46 m 相差在可接受范围之内,因此认为后续仿真计算具有参考价值,滑行试验计算结果如图5 所示。
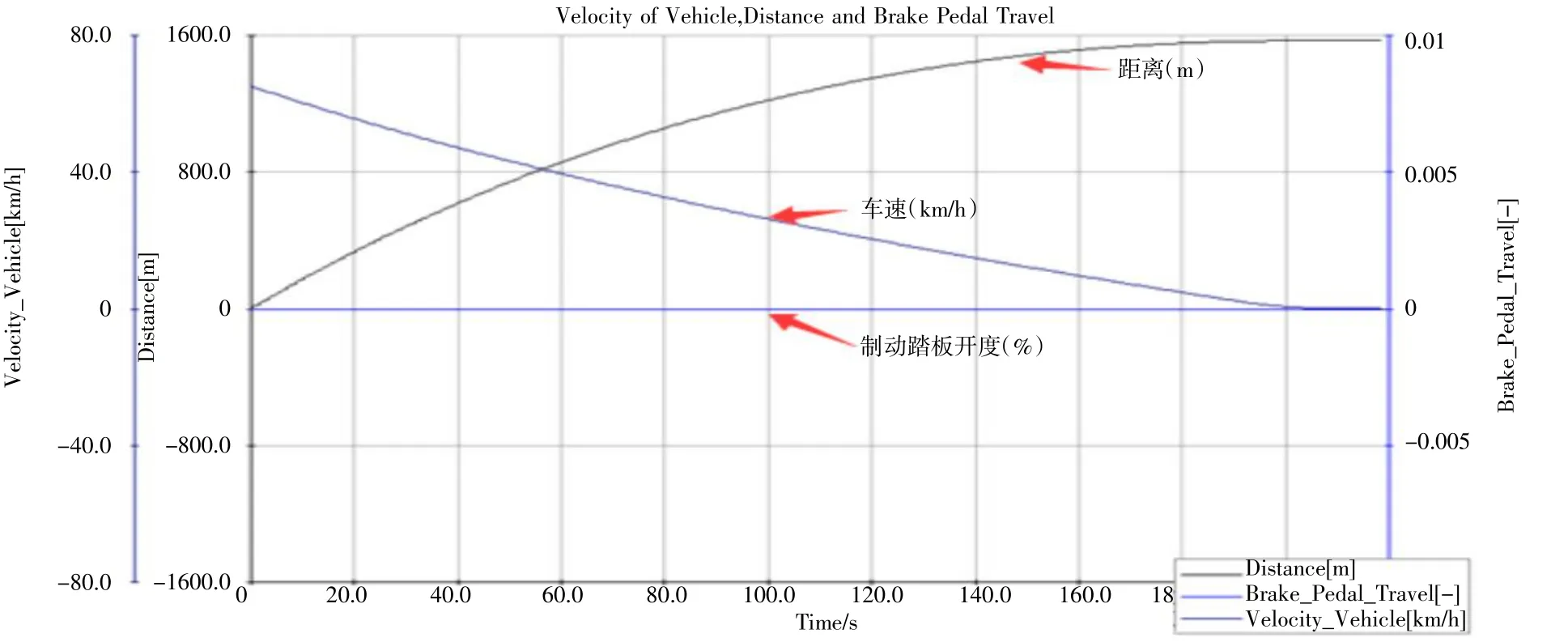
图5 0~65km/h 滑行试验计算结果
2.4.2 0~50 km/h 全油门加速
0~50 km/h 全油门加速时间仿真计算结果为11.85 s,满足小于等于20 s 的设计要求,加速试验计算结果如图6 所示。
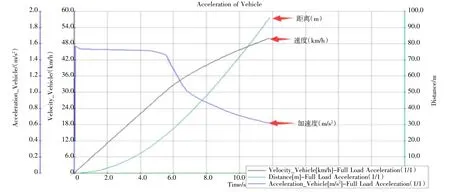
图6 0~50km/h 全油门加速试验计算结果
2.4.3 最大爬坡度
最大爬坡度仿真计算结果为15.80%@15 km/h,满足大于等于15%@15 km/h 的设计要求,最大爬坡度计算结果如图7 所示。
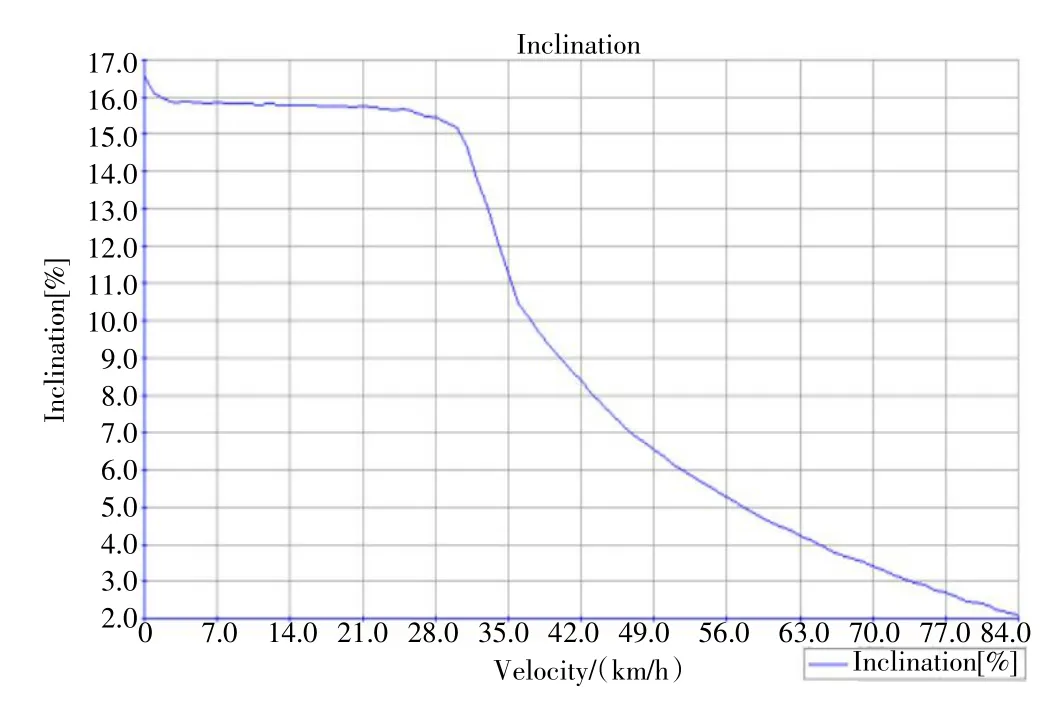
图7 最大爬坡度试验计算结果
2.4.4 最高车速
最高车速仿真计算结果为83 km/h,满足大于等于69 km/h 的设计要求,最高车速计算结果如图8 所示。

图8 最高车速试验计算结果
2.4.5 40 km/h 等速续航里程
40 km/h 等速能耗仿真计算结果如图9 所示,车速控制在40 km/h,加速至40 km/h 后无加速、减速行为,因此认为试验运行可信,查询图表value 值获取距离S40(Distance[m])、耗电量E40(Electrical_Consumption[kWh])最终结果,所以该车型40 km/h 等速续航里程D40计算结果为:
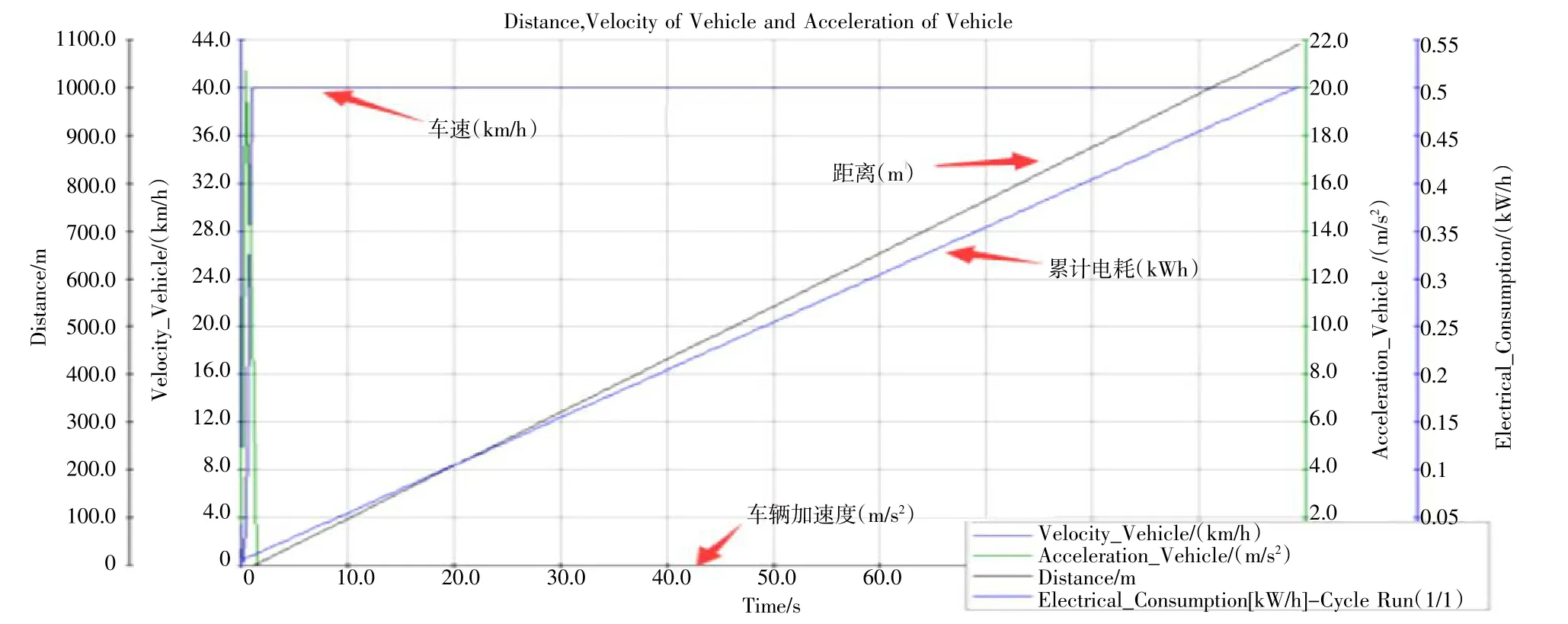
图9 最高车速试验计算结果
所以40 km/h 等速续航里程仿真结果满足大于等于300 km 的设计要求。
3 结语
使用Cruise 软件对一款变更动力总成的公交车进行建模、仿真分析,通过“40 km/h 等速续航里程”仿真得到该车型常用车速的经济性指标;通过“最大爬坡度”“最高车速”“0 ~50 km/h 加速”仿真得到该车型的动力性指标,所有仿真计算结果均满足设计指标要求。该仿真结果与理论计算结果有一定的差异,其根本原因是二者所使用的车辆行驶阻力系数差异所致,其中,理论计算所选用的阻力系数相对较大,这是为了考虑车辆最恶劣、最严苛的使用工况,避免车辆在复杂的使用环境中无法满足使用要求;而仿真计算所使用的阻力系数为相近车型在试验场性能道上滑行得出,相对可信度较高,而且为整车方案成本考虑,所选择的电机动力总成方案为供应商成熟方案,且高于设计要求。通过仿真计算分析为后续车型变更动力总成配置、总成参数持续优化提供依据、验证,提高开发工作效率,降低研发成本。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车维护与修理(2018年1期)2018-04-04
能源(2017年12期)2018-01-31
资源再生(2017年4期)2017-06-15
电源技术(2016年9期)2016-02-27
电源技术(2016年2期)2016-02-27
汽车维护与修理(2015年5期)2015-02-28
警察技术(2015年6期)2015-02-27
噪声与振动控制(2015年4期)2015-01-01
客车技术与研究(2014年1期)2014-03-20
