可重用空间碎片抓捕机器人*
2023-10-26 02:01王柄权张长龙索劭轩秦刘通王鹏飞刘金鑫
空间碎片研究 2023年2期
王柄权 ,张长龙 ,索劭轩 ,秦刘通 ,王鹏飞, ,刘金鑫
(1.西安交通大学未来技术学院,西安 710049;2.西安交通大学机械工程学院,西安 710049;3.西安交通大学空间智能制造研究中心,西安 710049;4.中国航天科技创新研究院,北京 100048)
1 引言
空间碎片,又称太空垃圾,是指人类在大气外层空间进行航天活动时产生或遗弃的物体,包括碎裂碎片、失效航天器等[1]。
随着几十年来各国航天事业的蓬勃发展,空间在轨物体的数量急剧增加,空间轨道资源日趋紧张,空间碎片问题日益凸显,给空间可持续性发展及利用带来了极大的挑战。据美国宇航监测网2013 年统计,已探知的空间碎片数量就多达16906 个,而无法统计的空间碎片甚至多达数千吨[2]。欧空局(ESA)的研究表明,如果空间碎片得不到有效的处理,到2030年左右,航天器碰撞的概率将会达到3.7%。因此,为了更加充分地利用具有较大价值的近地或高低轨道,同时降低卫星为防御太空垃圾增加的设计难度与成本,亟待解决轨道垃圾转移以及清理等难题。
本文首先从空间碎片危害、空间碎片清理任务推动捕获技术发展等角度阐述了空间碎片清除技术的国内外发展现状。其次从捕获方式实现维度对飞网、 鱼叉、机械臂等方式的关键技术进行分析和总结。最后针对现有捕获技术在空间碎片清除方面应用所存在的问题从技术途径角度概括了该技术的未来发展趋势并提出了一种可重用空间碎片抓捕机构。
2 国内外现状和发展趋势
2.1 国内外研究现状
目前,国内外空间碎片捕获方式主要利用主动移除技术,通过服务卫星接近空间碎片,利用末端捕获机构对碎片进行捕获并离轨。常用的捕获技术包括:(1)刚性捕获方法,以美国空军的FREND 机械臂为代表[3,4];(2)柔性捕获方法,以ESA的ROGER飞网为代表[5,6]。此外,近些年的研究还提出了吸附捕获、类飞网捕获、新型智能捕获等一系列新概念[4]。刚性捕获方案中多采用机械臂抓捕,它是现阶段空间碎片在轨捕获技术中研究最深入的技术,表1和表2汇总了国内外针对空间碎片进行在轨捕获项目中刚性、柔性捕获方案的研究现状。从表1 中可以看出,刚性捕获方案多用于卫星捕获,通过利用卫星自带的发动机喷管和对接环,使得机械臂可以在搭载适合某一特定类型卫星的手爪的前提下,顺利完成对卫星的捕获。但缺点也在于此,它只适合于捕获卫星,甚至只能捕获同一类型的卫星,更不可能对其他的不规则的没有辅助抓手的空间碎片进行捕获。
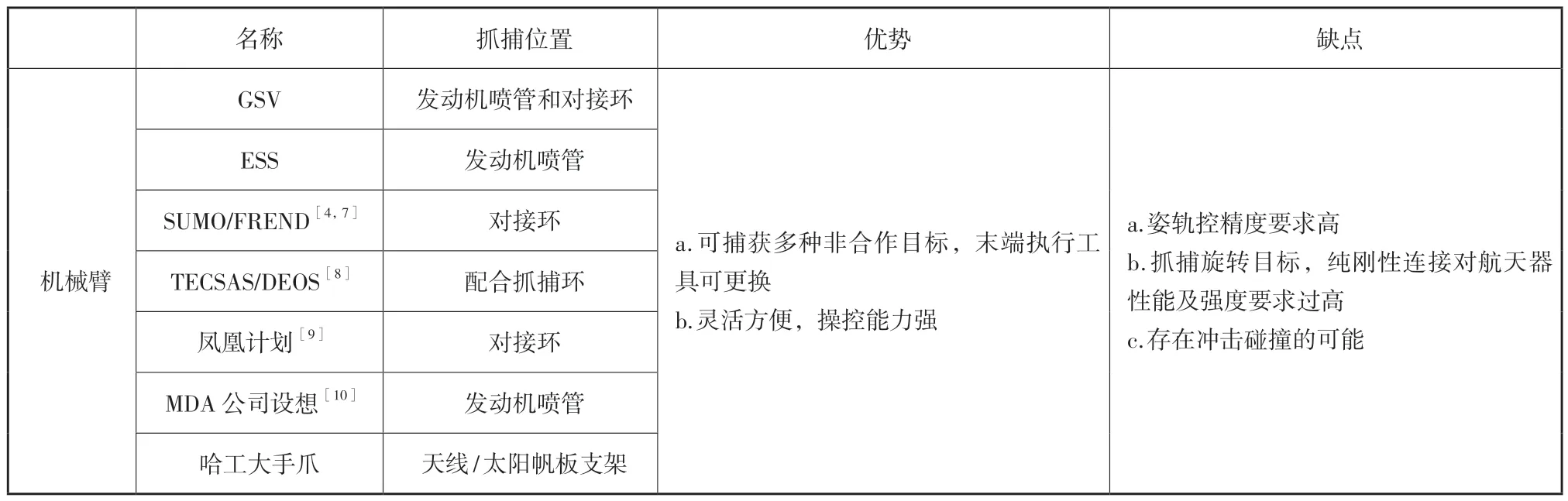
表1 刚性捕获方案Table 1 Rigid capture schemes
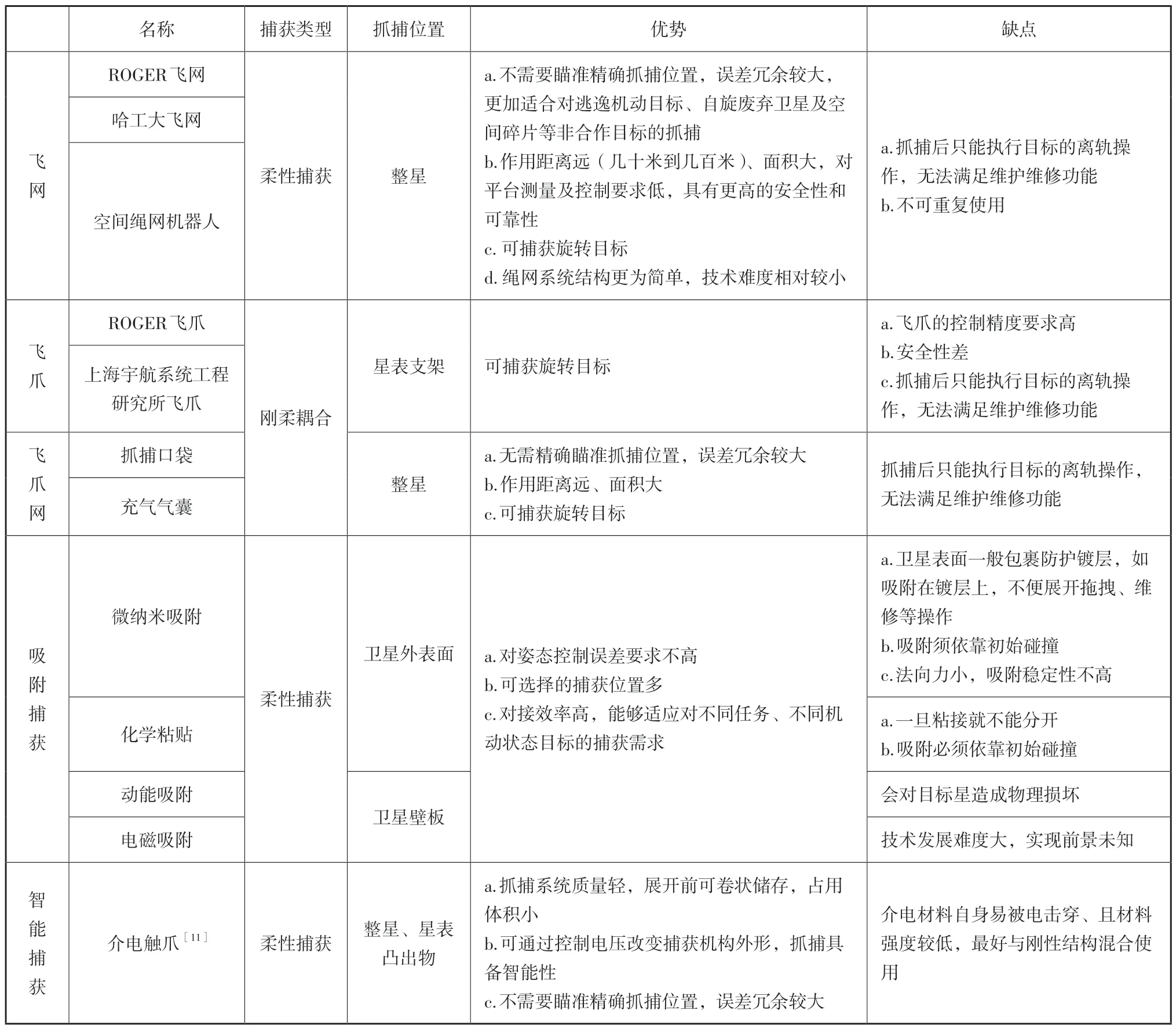
表2 柔性捕获方案Table 2 Flexible capture schemes
柔性捕获方案中以飞网、飞爪为主,近些年来也涌现出类飞网/飞爪、吸附捕获和智能捕获等新型捕获方式,它是现阶段空间碎片在轨捕获技术中研究最有前景的技术,可以实现对不同规则形状的空间碎片进行捕获,克服了刚性捕获方案只能针对特定卫星进行捕获的缺点,极大地扩展了捕获卫星的应用范围,而且还可以增加捕获机器人的重复利用率,大大降低成本。
2.2 未来发展趋势
当前捕获技术在实际捕获合作或非合作目标时都或多或少的存在一定缺陷:
(1)抓捕机构普适性差
不同碎片尺寸、形状、运动状态差异大,但现行抓捕设备结构单一,仅适用于特定的合作目标。例如SUMO/FREND机械臂依靠机械臂的末端执行机构抓捕目标航天器的对接环、螺栓孔等位置,对飞行器和机械臂的位姿精度要求较高;而新型捕获方法仅针对特定的非合作目标,捕获对象的可适应性差、可靠性差。
(2)只执行单次抓捕离轨操作、可重用度低
目前轨道碎片清除技术以主动移除技术为主,仅可执行单次捕获离轨操作,无法重复作业。例如ROGER 飞网只适合单次抓捕整个卫星(或空间碎片),并执行空间碎片或非合作目标离轨任务;而化学粘附捕获与目标物粘接后无法分离。以上两种捕获方法皆不适用于重复使用的作业场合。
(3)易产生破坏性接触
刚性捕获方法对服务卫星的位姿控制精度要求高,控制不当时存在一定的碰撞风险;柔性捕获方法在捕获成功后无法将空间碎片总体上定位定姿,具有不确定性;而微纳米吸附方式在拖拽目标卫星时导致卫星镀层脱落,会对目标星造成物理损坏。
(4)遥操作控制的滞后性
遥操作控制作为目前空间机器人控制的重要技术之一,已替代宇航员实现太空舱外检测、捕获、装配等非临场作业。然而,传统遥操作控制技术在天地大时延背景下,地面操作员与空间被控端通信的延时也会造成如主从端位姿轨迹误差,难以补偿空间机构末端轨迹偏移等诸多问题。
针对现有的问题,未来捕获技术将向以下方向发展:
(1)可重复使用
未来的在轨服务系统一般采用可重复使用的小型化、智能化的空间机器人,这样可以尽量减少对运载火箭能力的需求,同时能够减少系统费用和提高经济性。
(2)捕获机构柔性化
目前对非合作空间目标捕获技术的研究,多集中于机械臂刚性抓捕和飞爪、飞网类抓捕,但由于捕获空间旋转非合作目标如采用纯刚性机械臂对机械臂性能及强度要求过高,同时需要目标物有对接环、螺栓孔等位置。而飞网类捕获虽无需特殊抓手,但不能重复使用,成本过高。瑞士空间中心借助介电弹性材料作为驱动器,设计了空间触手抓捕系统,它具有简单可靠、智能操控、柔性抓捕、可重复使用等特点,但不适合抓捕大目标。它为非合作空间目标捕获技术提供了新的空间抓捕思路,后期对于旋转的非合作目标捕获采用半刚性或柔性抓捕系统更为可取,可以借鉴瑞士空间触手抓捕机构的设计思想,设计出更适合实际任务需求的空间非合作目标捕获机构。
(3)捕获行动自主化、智能化
对于地球静止轨道上的非合作目标,不能采用航天员出舱协助捕获的方式,无人捕获因为受到通信的延迟、间断以及天地链路带宽等限制,也很难进行稳定可靠的操作。因此,具备自主捕获目标能力的服务航天器将成为未来在轨服务的发展方向。另外,由于目前在轨航天器的设计复杂多样,并且没有通用统一的捕获接口,如电推平台就没有轨道转移发动机喷管,可伸缩抓捕机构就不再适用。这就要求捕获机构自身具备智能性,可根据计算机视觉和认知推理,改变捕获机构形状抓捕目标。
3 可重用空间碎片抓捕机器人
目前国内外空间碎片捕获方式的可靠性与普适性仍存在部分盲点。传统的空间碎片捕获机构具有无法平衡捕获的可靠性、对不同形状和尺寸的空间非合作目标的适应性、对服务卫星冲击较小等特性。因此,亟需一种新型的可重复使用的空间碎片柔性抓捕机器人,以满足自旋、章动、逃逸、外形、尺寸不规则等特点的空间碎片收集的需求,进而提升空间复杂碎片的治理能力。
3.1 总体设计思路
针对以上多样化空间碎片清除的技术需求,本文设计了一种可重复使用的空间碎片柔性抓捕清除机构,配置以适用于自旋、章动、逃逸、外形不规则等特点的空间碎片收集需求的包络、消旋柔性机械臂及收纳机构,提升了空间复杂碎片治理能力,突破了柔性结构展收、碎片可靠收储等关键技术;并基于以上设计建立了空间碎片柔性抓捕机构的运动学模型,分别从目标碎片位姿视觉测量和空间碎片抓捕机器人协同柔顺控制规划两个方面展开技术研究,以实现各种复杂空间碎片的低冲击、低能耗、高效率收集,总体思路如图1所示。
3.2 空间碎片抓捕平台与收纳结构设计
3.2.1 空间碎片抓捕平台
由于空间碎片大多为自旋、章动、逃逸、外形不规则的非合作目标、为了满足空间碎片抓捕的复杂、灵巧操作需求,并具有一定的冗余性与容错能力,基于仿生柔性捕获结构对空间碎片进行低冲击、低能耗收集治理,提升空间复杂碎片治理能力。本文设计的抓捕机构型如图2 所示,主要包括圆柱形基座平台、4个模块化线驱动长柔顺机械臂(臂长1000 mm)和四个模块化线驱动短柔顺臂组成(臂长300 mm)以及收纳机构等模块。圆柱形基座平台用以安装机械臂及其驱动模块,并带有类光圈开合机构(最大开口直径500 mm),8 个模块化线驱动机械臂实现对空间目标的协同抓捕。
(1)机器人本体结构包括抓捕机构和收纳机构两部分,其中抓捕机构由4条长柔顺机械臂和4条短柔顺臂组成。长臂用以远距离抓取空间碎片并基于其自身所特有的被动柔性实现包络消旋,待碎片到达短臂作业范围时,短臂接替长臂作业。
(2)抓捕平台的开合装置旋开,短臂将碎片压入弹性挡板(黄色)。
(3)当碎片落入收纳袋后,弹性挡板自动复位成闭合状态,以此防止碎片再次飞出收纳袋。
(4)多次捕获后,收纳结构容积占满,在柔性臂的较小推力下,弹簧钩会脱离分级释放环,解除第一节限位,收纳袋即会多展开一层空间。同时,弹簧钩在弹性恢复作用下,钩住下一个钩环,这样可以保证碎片既能保证处于收纳袋底部的同时,还能逐级释放空间,做到大容量收纳。
3.2.2 收纳机构
收纳机构的设计需从轻质、可靠收纳和可靠存储三方面考虑。通过对收储结构功能及特性分析,如图3 所示,为满足可靠收纳和存储功能的同时要做到结构简单和轻质化的设计要求,提出了一种基于弹夹原理的圆柱形逐级展开式收纳结构方案,即可实现大跨度碎片的顺序收纳,也可保证大容积的可靠存储,主要构成如图4 所示,收储结构外径约500 mm,构型为圆柱体,压缩状态高度约215 mm。
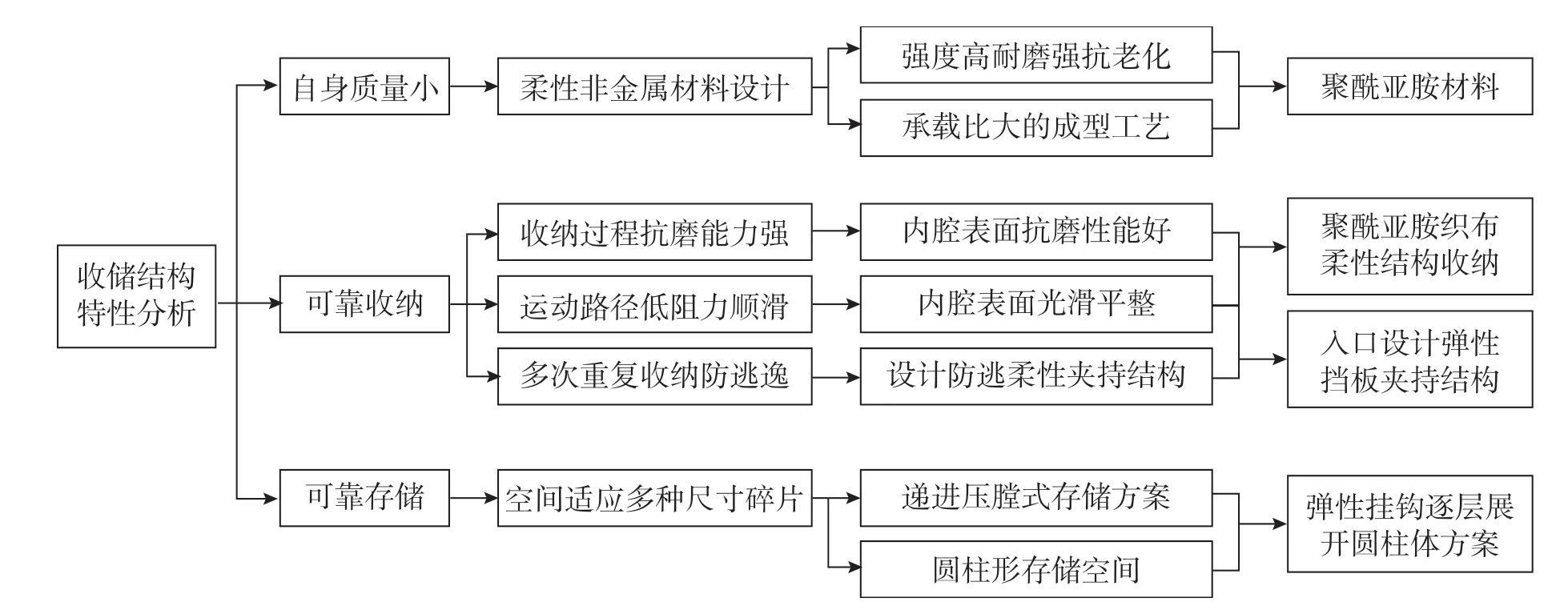
图3 收储结构设计分析Fig.3 Design and analysis of storage structure
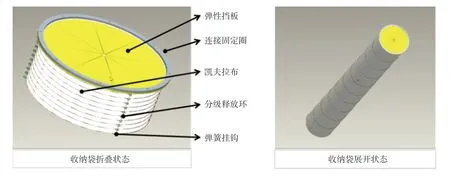
图4 收储结构组成示意图Fig.4 Schematic diagram of collection and storage structure
3.3 机械臂运动学模型
多臂空间机器人的基础是双臂空间机器人,首先推导了双臂广义相对雅可比矩阵,并进一步推广至多臂空间机器人以及得到适用于空间机器人与地面机器人的一般形式。如图5 所示,双臂空间机器人系统的运动学模型主要包括卫星基座、na自由度的机械臂(Arm-a)以及nb自由度的机械臂(Arm-b)。
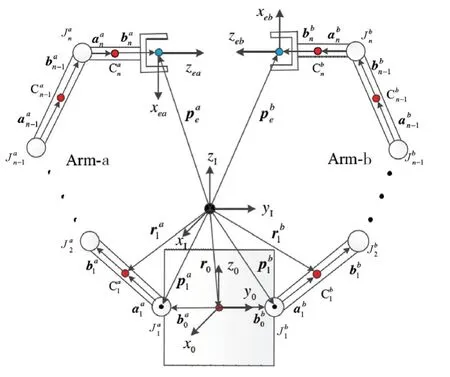
图5 双臂空间机器人系统Fig.5 Two-arm space robot system
各个机械臂的末端速度表示如下:
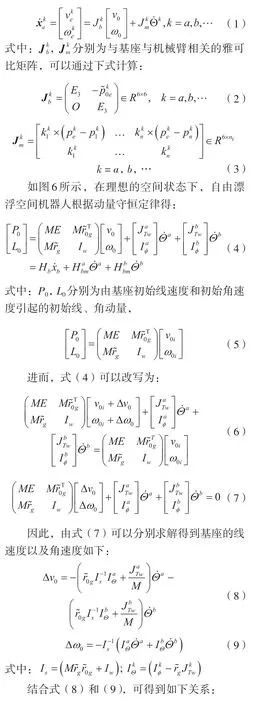
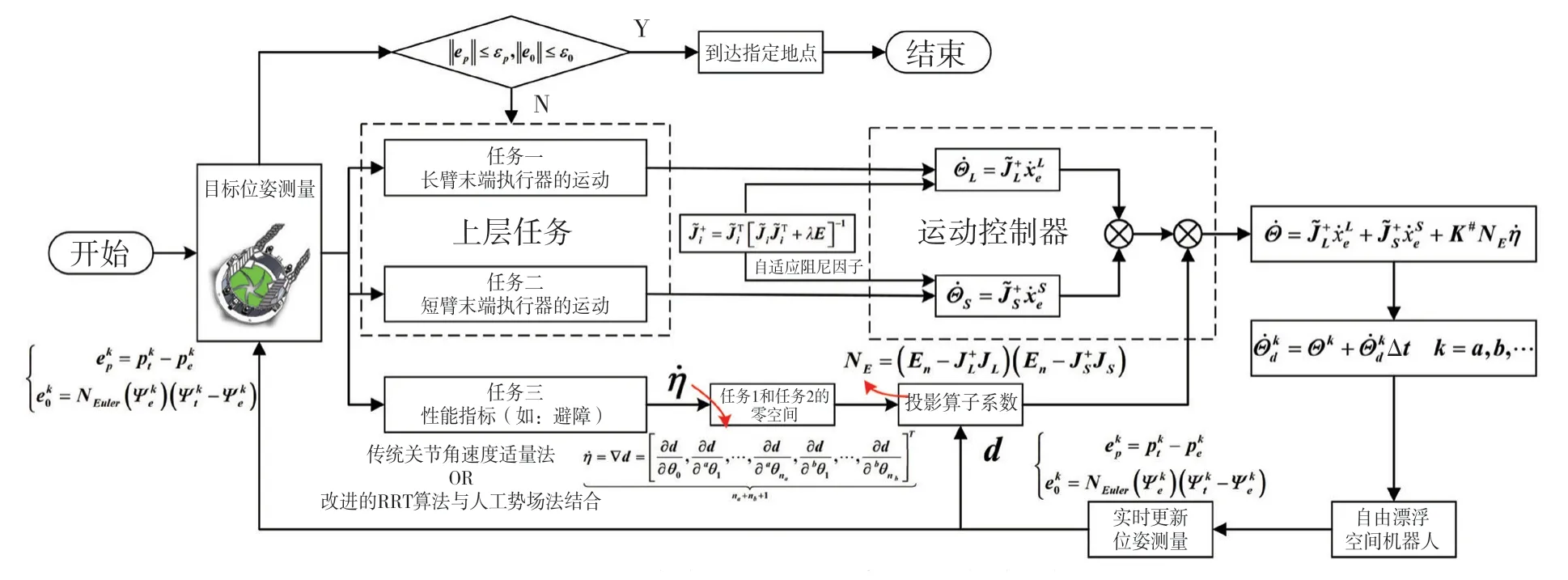
图7 基于混合任务优先级的多臂运动规划流程框图Fig.7 Multi-arm motion planning flow diagram based on mixed task priorities

系统的运动学模型建立、协调轨迹规划方法以及协调柔顺控制方法的研究。同时为满足空间碎片可靠收纳和实现大量存储功能,基于结构简单、轻量化、大承载比的原则,进行非金属柔性构型方案设计,提出了一种基于弹夹原理的圆柱形逐级展开式收纳结构方案。针对空间非合作目标缺乏先验特征知识的情况,拟依托目标本体的固有特征进行视觉识别与位姿测量。空间碎片抓捕时,针对自由漂浮空间机器人可能出现的自碰撞问题,拟开展基于视觉反馈的混合优先级协同任务规划。针对多臂与目标的安全接触以及解决阻抗控制参数选取的困难,拟研究基于学习的阻抗参数在线辨识的多臂协调柔顺控制方法。最后基于虚拟试验等半物理仿真手段对前述设计进行实验验证。
总体设计方案如图8 所示,总体技术路线如图9所示。
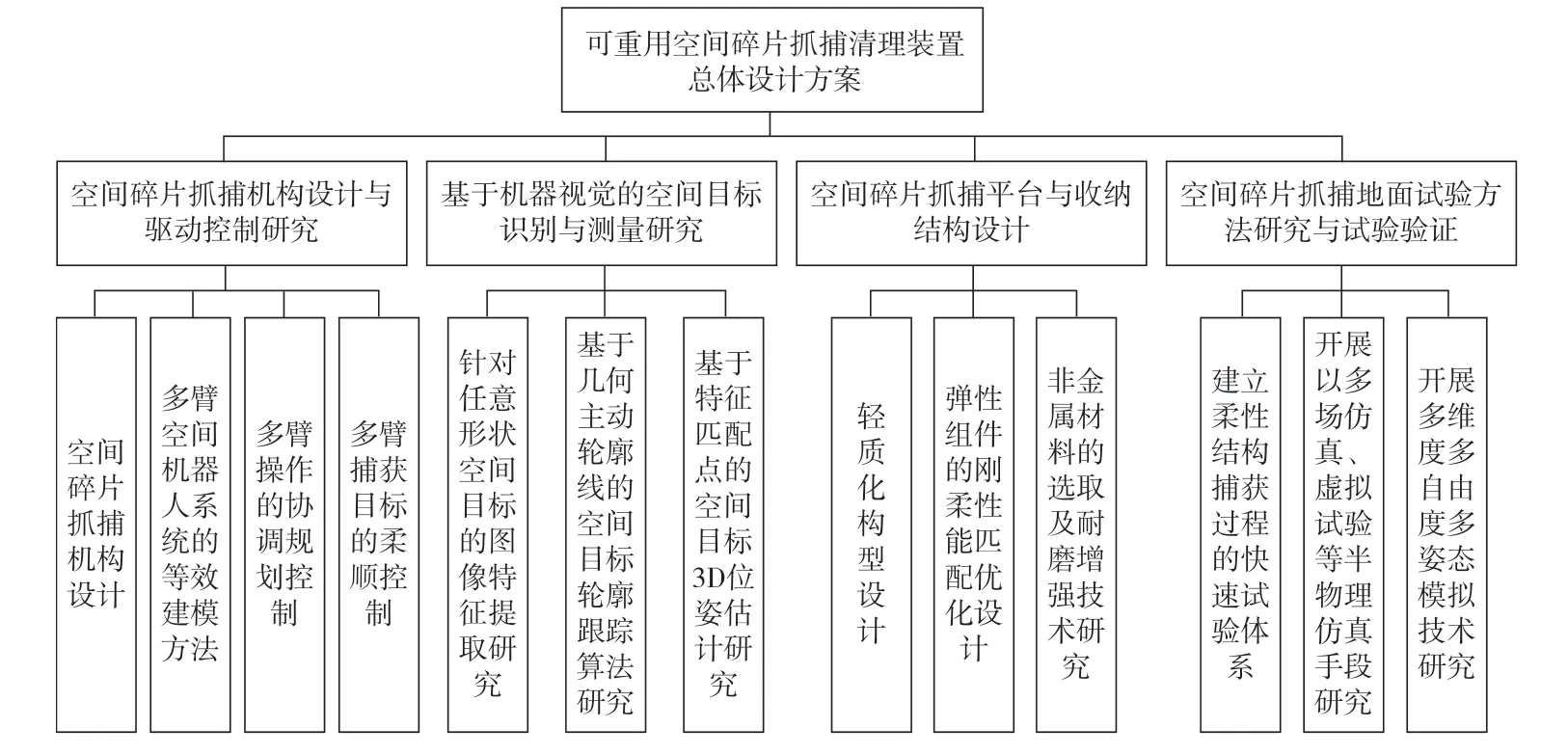
图8 总体设计方案Fig.8 Overall design scheme
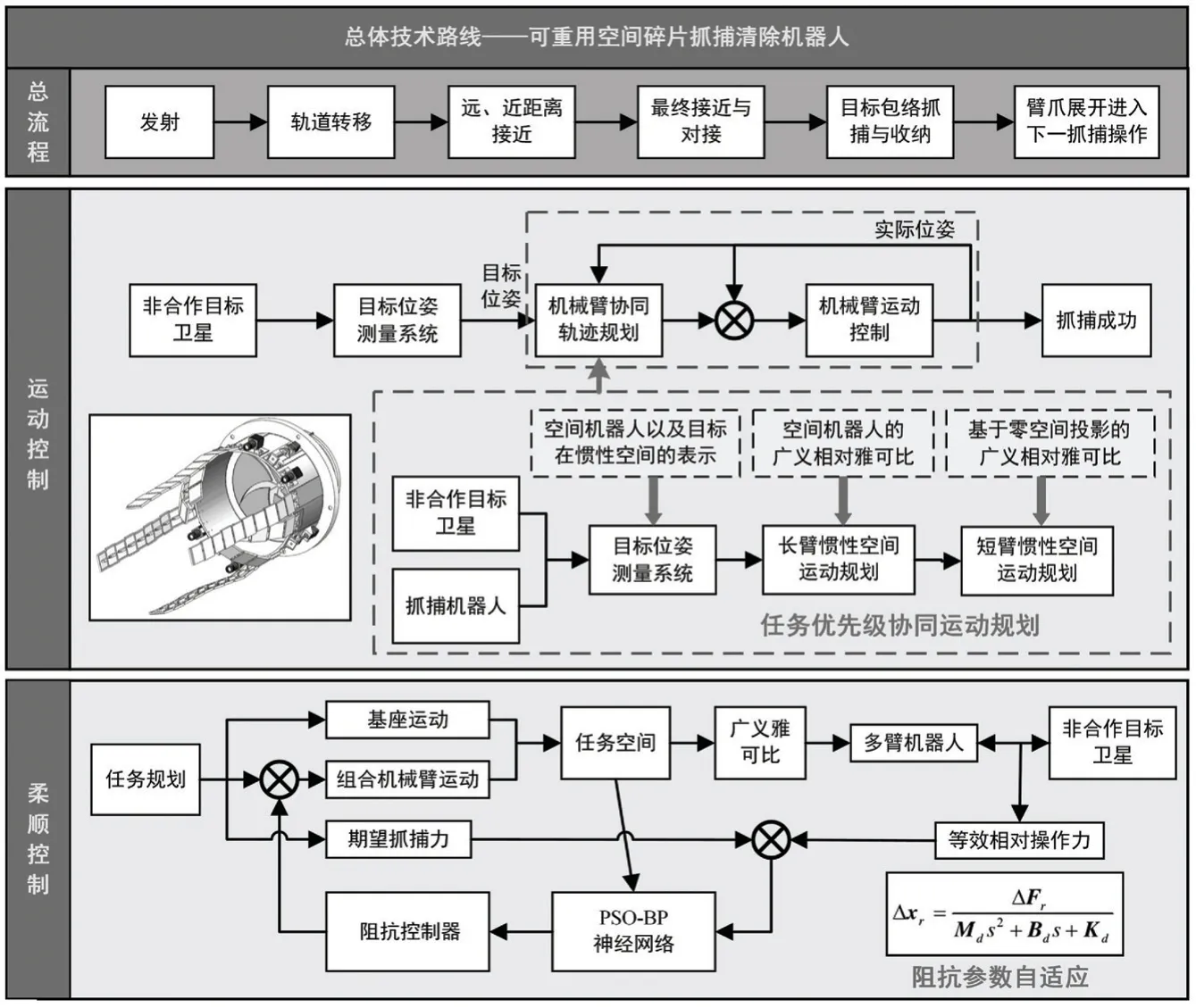
图9 总体技术路线Fig.9 Overall technical route
4 结论
本文就空间碎片清除技术的发展历程以及现有技术的成熟度进行了详细介绍并归纳总结,分析了现有空间碎片清除技术存在的,如仅单次捕获离轨,无法重复使用;缺乏柔性,会对目标星造成物理损坏;效率低下等诸多问题,面向自旋、章动、逃逸、外形不规则碎片的可重用抓捕清除的客观需求,提出了一种可重用空间碎片抓捕机器人方案。完成了空间机器人抓捕机构平台以及大空间弹夹式收纳机构结构设计,并初步拟定了可重用空间碎片抓捕机器人总体设计方案与通体技术路线。目前处于原理样机设计阶段,但该设计思路与方案对于可重用、柔性捕获、大容量收纳等空间碎片清除技术的探究与实现具有重要意义。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
军民两用技术与产品(2021年10期)2021-11-25
文化创新比较研究(2020年7期)2021-01-13
当代工人(2020年8期)2020-05-25
科学家(2019年3期)2019-08-18
小溪流(画刊)(2017年12期)2018-01-10
科学与财富(2016年28期)2016-10-14
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
新东方英语(2014年1期)2014-01-07