基于锚链可靠性的深水半潜平台设定点追踪控制
2023-10-27 01:43朱枭猛
船舶 2023年5期
朱枭猛 李 彬
(1. 中国船舶及海洋工程设计研究院 上海 200011; 2. 中国海洋工程装备技术发展有限公司 上海 200010)
0 引 言
随着石油和天然气开采进入更深的水域,锚泊辅助动力定位(推进器辅助系泊)技术已成为深海浮式结构定位控制的替代方案。在半潜式平台的特定工作水深范围内,锚泊辅助动力定位系统已被证明具有良好的经济效益。系泊缆和推进器的组合既可以降低动力定位(dynamic positioning, DP)系统的能耗,又可以保证系泊缆安全性,而系泊缆安全性是定位系统的重要因素,系泊缆的失效会威胁到平台、人员的正常作业。整个系统受到环境力(包括海流、波浪和风)的影响较大,因此考虑系泊缆安全的控制策略对于采用锚泊辅助动力定位系统的半潜式平台具有重要意义。
自20世纪70年代以来,依赖于动力定位系统的发展,锚泊辅助动力定位技术得以应用。BALCHEN等[1]提出一种基于Kalman滤波与最优控制的动力定位控制方法。FOSSEN等[2]提出一种离线Kalman算法,用以估算DP系统中的船舶模型运动参数;FOSSEN[3]还对多种DP与锚泊辅助动力定位控制方法进行了总结。为了适应不同的环境条件,研究人员提出多种控制方案,例如通过动态控制锚链张力或长度的控制方法[4-5],使浮式结构改变系泊系统刚度特性而抵抗环境载荷;通过预先设置的控制器库以切换控制系统,对主要工作频率以及平均漂移力的改变进行动态适应。NGUYEN等[6]提出基于结构可靠性的控制方法,根据环境载荷的变化,事先计算临界位置并作为控制系统的参考,通过考虑锚链线张力的动态效应来计算可靠度指数,从而对该临界位置进行评价。BERNTSEN等[7]提出另一种基于可靠性的控制方法,他们将可靠度指数作为控制器算法内部变量,并且可以确保危险锚链的可靠性。WANG等[8]利用锚链结构可靠度指数设计了单点系泊浮式生产储卸油装置(floating production storage and offloading unit, FPSO)的定位系统控制器,以确保FPSO在恶劣海况下的锚链安全性,并通过引入可靠度指数,有效降低系泊线的动态张力。
目前,基于结构可靠性的锚泊辅助动力定位控制方法研究多集中于内转塔系泊FPSO的结构中,并且主要考虑1条或者几条相对最危险的系泊线[9]。然而,由于转塔系泊FPSO具有风标效应,该计算方法在水平三自由度的约束中只考虑2个平动位移自由度。对于具有多点系泊系统的半潜式平台来说,水平面三自由运动均受到系泊缆线的约束作用,而半潜平台的艏摇转动同样会引起系泊线张力变化,因此半潜平台需要专门适用的控制方法。
本文提出了1种基于锚链结构可靠性的控制策略,该方法通过生成由结构可靠度指数推算出的最佳设定点来保护系泊缆免受损伤。首先,建立了具有锚泊辅助动力定位系统的半潜式平台的运动控制数学模型和环境载荷模型;然后,根据所有系泊缆的结构可靠度指数和通过在线求解能耗方程得到的最优设定点(与以往对转塔系泊FPSO的研究不同,半潜式平台的设定点包含水平面上的3个自由度),设计定位系统控制器;最后,对所提出的控制方法进行时域耦合数值模拟,并与传统PID控制方法比较;分析了系泊缆的可靠性水平,比较了定位过程平台运动特征以及系泊缆张力。
1 半潜平台运动数学模型
通常可将船舶运动模型分为波频运动模型和低频运动模型。船舶波频运动主要由一阶波浪力主导。非线性的低频运动方程包括了二阶波浪力、风力、流力、推进器推力和系泊力。定位系统主要用于控制低频运动[10]。为便于进行控制器设计,本文建立船舶水平三自由度运动方程。船舶处于低速定位过程时,运动方程为[10]:
式中:M为包含附加质量的惯性阵;D为阻尼阵;τwave2、τwind、τcurrent、τmoor和τthruster分别为二阶波浪力、风力、流力、系泊力和推进器推力,N。ν=[u,v,r]T为随体坐标系下船舶运动速度;η=[x,y,ψ]T为地球固定坐标系下船舶位置;J为坐标转换矩阵。
一阶波浪力采用三维辐射绕射势流理论进行求解。规则波流域速度势见式(4):
式中:ω为波浪频率,rad/s。根据文献[11],见式(5):
式中:0φ、7φ分别为入射势和绕射势,jφ为六自由度单位速度势,表示浮体运动对流场扰动的贡献。
根据速度势,流体作用力可通过表面压力积分获得:
式中:ρ为水密度,kg/m3;nj为面元法向;S为平均湿表面积,m2。
不规则波被认为是若干规则波的叠加。设规则波数为N;ωj、aj分别为波谱中各规则波频率与波幅;fj为与之对应的Froude-Krylov力和绕射力;εj为随机相位角,则一阶波浪力的计算公式见式(7):
采用二次传递函数计算二阶波浪力,忽略和频力,根据Newman近似公式,得到如式(8)[12]所示二阶波浪力计算公式:
式中:Tjj为传递函数。
风载荷采用美国石油协会规范方法进行计算。将受风部分离散成若干模块,分别计算并求和,则风载荷公式见式(9):
式中:Cw=0.615;Cs为形状系数;Ch为高度系数;Ai为受风部分投影面积[14],m2;Vw为相对风速,m/s。
流载荷基于计算流体力学方法得到的流载荷系数进行计算,见式(10):
式中:Css为半潜平台流载荷系数;Vc为相对流速,m/s。
系泊缆动力学计算采用集中质量法,即假设缆线由若干集中质量点和无质量直线段杆元组成[11]。杆元仅模拟杆轴向和扭转特性,质量、重力、浮力、流体作用力等均集中作用于杆元两端节点处。杆元两端建立随体坐标系Sx1y1z和Sx2y2z,节点处建立随体坐标系Nxyz,如图1所示。
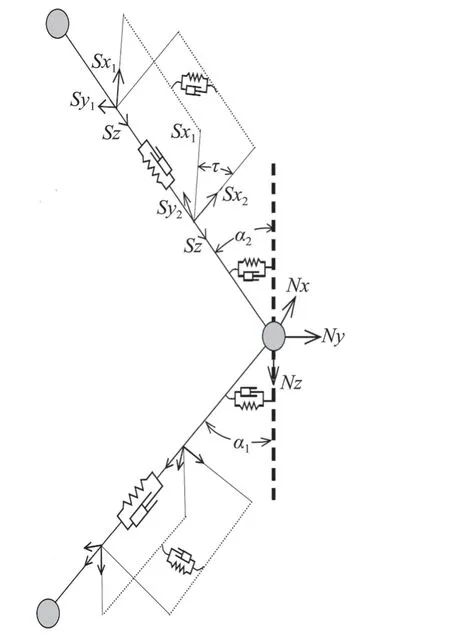
图1 杆单元模型
杆元中轴向弹簧阻尼单元有效张力见式(11):
式中:EA为轴向刚度;ε为轴向应变;v为泊松比;Po为外压,Pa;Ao为承压面积,m2;Dt为拉伸阻尼;为单元长度变化率。
杆元间弯矩见式(12):
式中:EI为弯曲刚度;C为有效曲率;为曲率变化率;Db为弯曲阻尼。
杆元扭矩见式(13):
式中:Kr为扭转刚度;τ为扭转角,°;L0为单元初始长度;Dr为扭转阻尼。
作用于缆线的阻力采用Morison方程求解。相对于管线的流速Vr,可以分解为垂直于管线轴线的Vn和平行于管线轴线的Vz,其中Vz还可以进一步分解为Vx与Vy。如此,阻力可以分解为3个方向分量(即Fx、Fy、Fz),对应的阻力系数分别为Cdx、Cdy、Cdz。3个方向的流体阻力见式(14):
式中:ρ为流体密度,kg/m3;Da为管直径,m。
附加质量的影响通常在局部x、y、z方向上分别计算,对于每个方向缆元受缆加速度引起的额外惯性力和周围流体加速运动的作用力。各方向附加质量作用见式(15):
式中:Ca为该方向附加质量系数;MF为流体质量;AL为该方向管加速度分量,AF为该方向流体加速度分量,m/s2。
2 定位系统模型
2.1 基于锚链结构可靠性的设定点追踪控制
本文采用半潜平台最优设定点追踪的方式来控制锚链动态张力和结构可靠性。首先给出考虑所有锚链线张力的二次能耗方程,最优设定点的获取与该方程有关。能耗方程定义见式(16):
式中:n为系泊线总数;Tci为第i条系泊线的临界张力;Ti为第i条系泊线的实时张力;αi代表每条系泊线的权重系数,这将在后续进行详细计算。
半潜平台的最优设定点定义见式(17):
式中:xopt、yopt、ψopt分别代表设定点水平三自由度坐标。
该设定点还可以如式(18)所示:
式中:η0=[x0,y0,ψ0]T为平台当前时刻位置坐标向量;Δη=[Δx,Δy,Δψ]T是平台位置增量。
设定点处的第i条系泊线的张力见式(19):
式中:hopti为最优设定点处第i条系泊线的水平跨距;h0i为当前时刻第i条系泊线的水平跨距;Δhi为系泊线水平跨距的增量。
通过泰勒展开并忽略高阶小项,系泊线张力见式(20):
式中:ci是平台当前位置的刚度增量[13]。
可认为当能耗方程取得极值时,有最优设定点,见式(21):
将张力表达式代入上式,可以得到关于3个自由度分量的方程组,见式(22)至式(24):
式中:Hxi和Hyi锚桩点位置坐标与平台导缆孔向位置坐标在北东坐标系中的差值,分别见式(25)、式(26):
为计算最优设定点追踪法中的权重系数αi,这里引入了锚链线可靠度指数。该指数计及锚链线动态效应,由式(27)计算:
式中:Tb,i为第i条系泊线的断裂强度;σi为动态张力的标准差,用以评估张力动态效应;σb,i断裂强度标准差;ki为尺度系数。
每条系泊线的权重系数定义如式(28)所示:
式中:δci为可靠度指数的临界值,Δδ用来避免出现奇异点,pi和qi为经验参数。
每条系泊线的权重系数与其自身及其他系泊线的可靠度指数均相关。如果该条系泊线可靠度指数提高,则其权重系数会相应降低,这意味着该条系泊线对系统的影响降低。而可靠度指数降低接近临界值时,则其权重系数增加,系统将对该条系泊线的影响偏重考虑。
系泊线可靠度指数根据时变张力实时计算,得到可靠度指数后可以计算每条系泊线的权重系数,进而代入最优设定点方程组进行求解。利用该方法得到的最优设定点坐标具有水平3个自由度,适合于半潜式平台,并且可以考虑所有系泊线的动态效应。
2.2 控制器模型
DP控制系统采用PID控制器,见式(29):
动力定位系统主要对平台低频运动进行控制,本文采用时间离散Kalman滤波对船舶运动信号进行处理,获得低频运动状态。
DP船舶或平台的运动系统通常是过驱动的,一般将推力分配转化为最优化问题来求解[15]。目标是在各推进器发出所需总推力和力矩的同时达到最低的能源消耗,并且减小机械磨损。推力分配目标函数为式(30),约束条件为推力和变化率上下限以及角度和变化率上下限:
式中:s=τ-B(α)u;其中τ为总推力,B为方位角矩阵,α为各推进器方位角,u为各推进器推力。式(30)中第1项为总能量消耗,第2项sTQs用于惩罚推力松弛变量s,并保证优化问题始终有可行解。其中对角阵Q>0并且需要足够大,以使在任何情况下s趋近于0。权值(Ω>0)用来调节优化目标[3]。
半潜平台具有6台全回转推进器,推进器的布置如图2所示。

图2 半潜平台推进器布置
3 半潜平台运动控制时域模拟
半潜平台的主尺度见表1,系泊线分布示意图如图3所示。

表1 半潜平台主尺度参数

图3 系泊线分布示意图
系泊缆采用组合成分缆,系泊缆参数见表2,主要环境参数见表3。

表2 系泊缆主要参数

表3 主要环境参数
平台水动力性能分析采用AQWA软件并基于势流理论进行计算。其面元模型如图4所示,平台流载荷与风载荷系数如图5所示。

图4 平台水动力模型

图5 半潜平台流载荷与风载荷系数
基于以上数学模型及参数,对深海半潜平台定位过程进行时域模拟。平台初始位置如图6所示,时域耦合数值模拟过程如下页图7所示。假设作业环境条件相对稳性,且风、浪、流同向以使计算偏于保守,环境力前馈通过滤波形成低频载荷信息,输入控制器用于DP实时解算。

图7 数值分析流程图
为了进行对比,在控制系统其他参数相同的情况下,分别在不使用和使用最优设定点跟踪算法的情况下进行了仿真。数值模拟在3个环境载荷方向(即0°、45°和90°)上进行。在模拟过程中,半潜平台处于锚泊辅助动力定位状态,通过数值计算获得平台运动、缆索张力、缆索可靠度指数等信息。
4 计算结果与讨论
根据数值模拟结果,表4、表5和表6分别显示了不同环境荷载方向下的最小可靠度指数、最大张力和最大位移偏差结果。

表4 最小可靠度指数对比

表5 最大张力对比 kN

表6 最大位移和艏向角
45°环境力下的船舶运动轨迹对比如图8所示,其中无设定点追踪和有设定点追踪的模拟结果分别标识为“PID”和“SPC”。该方向下,平台在水平X、Y两向均受到环境力作用。

图8 运动轨迹对比
图9显示了45°环境载荷下,1号、4号、7号、10号系泊缆的结构可靠性指数。这4条系泊缆分布在平台周围4个方向,具有代表性,与之同组的其他系泊缆结果与这些结果相似。

图9 系泊缆结构可靠度指数(1、4、7、10号)
图10显示了相应系泊缆的动态张力时域结果,图11展示了不同控制方法下的水平三自由度定位系统总推力。推进器推力均处于低频工作状态,符合动力定位系统的运行特点。采用设定点追踪方法的模型,相比于只采用PID 控制的模型,其推进器总推力略有增大。

图10 系泊缆张力(1、4、7、10号)

图11 水平三自由度总推力
本文提出的半潜平台设定点追踪控制算法基于系泊缆结构可靠性,可监控所有系泊缆并动态设置权重系数。从图9中可靠性指数的比较来看,各系泊缆的可靠性指数在设定点追踪的参与下能够稳定在较高水平,约为4.5。但如果没有设定点追踪控制,最小可靠性指数便降至3以下。
从表4可以看出,最小可靠性指数随设定点追踪而逐渐升高,这意味着该方法有利于保证系泊缆的可靠性。此外,设定点追踪控制还将最大张力降低,如表5所示。
在本文数值模拟中的模型设置和环境条件下,设定点追踪可以将最大张力降低约7%。图10显示,在设定点追踪控制下,各系泊缆的张力保持在较小的动态变化范围内。
通过表6可以看出,在设定点跟踪控制中,平台位置和艏向角的最大偏差较小。
通过对比图8中45°环境力下的船舶航迹,在控制参数相同的情况下,半潜式平台的最大位置偏差约为5 m,但在设定点追踪控制下,位置偏差小于2 m。对于半潜平台锚泊辅助动力定位系统,应用最优设定点追踪可以提高定位操作的精度。
5 结 论
本文建立了一种基于系泊缆结构可靠性的最优设定点追踪算法,并将其应用于半潜式平台锚泊辅助动力定位。文中给出了专门适用于半潜式平台的设定点计算方法,并且通过时域耦合数值模拟进行仿真验证和对比。结果表明:在控制参数相同的情况下,采用设定点追踪控制可使系泊缆结构可靠性保持在较高水平;同时,在设定点跟踪控制的参与下,提高了半潜式平台推进器辅助系泊系统的定位精度。此外,该方法还降低了最大张力并缩小了系泊缆的张力动态变化范围。
基于可靠性的设定点跟踪控制适用于半潜式平台的锚泊辅助动力定位系统,并能一定程度上保护系泊缆。该方法可在工程实践中进一步发展。
猜你喜欢
江苏船舶(2023年2期)2023-06-14
河南科技(2023年1期)2023-02-11
Chinese Physics B(2022年5期)2022-05-16
船海工程(2021年6期)2021-12-17
船舶标准化工程师(2020年1期)2020-06-12
黑龙江交通科技(2020年5期)2020-01-13
有机氟工业(2019年2期)2019-08-12
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
江苏科技大学学报(自然科学版)(2015年3期)2015-03-07
船舶力学(2014年5期)2014-01-19