
相控阵测控技术(三):相控阵连续闭环角跟踪的随机误差*
2023-10-31 13:37刘嘉兴
电讯技术 2023年10期
刘嘉兴
(中国西南电子技术研究所,成都 610036)
0 引 言
相控阵的连续闭环角跟踪是一个新的课题,笔者已在文献[1]中对此进行了综述,并在文献[2]中对其进行了分析,但目前尚未见到分析其随机误差的资料,是一个需要弥补的空白,本文将对其进行分析。连续闭环角跟踪的角误差提取方案主要有相位和差单脉冲和幅度和差单脉冲两种。两者的随机误差相差不多,但后者需要形成4个指向相互偏离的波束,设备较为复杂;前者则不需要这个四波束形成部件,设备较为简单,特别是在要求同时形成多个波束来跟踪多目标时,其设备将大大简化,使成本大大降低。鉴于降低相控阵的成本是一个永恒的重要课题,因此本文将主要介绍相控阵相位和差单脉冲的随机误差。
相比于机扫天线的角跟踪,相控阵角跟踪的随机误差存在一些特殊的误差源,包括电扫描的增益特性引起的天线增益降低使相控阵的输出信噪比(Signal-to-Noise Ratio,SNR)下降、电扫描使相位和差单脉冲系统的基线变短导致角跟踪的灵敏度降低、相控阵多阵元通道幅相不一致性导致的合成信噪比下降、数字化带来的量化随机误差、相控阵的全电子递归累加环对动态滞后变化的影响等。本文将在笔者已连载发表的文献[2]的基础上,对这些特殊问题进行分析。
1 热噪声引入的随机误差
下面分析接收系统内部热噪声引入的随机误差。
相控阵相位和差单脉冲角跟踪系统角误差提取的原理框图如图1所示,其中子阵I和子阵II是相位中心相距为D的两个测角子阵,它们构成一个相位干涉仪。两测角子阵的信号合成器输出端有功率为S的信号和功率为N的热噪声,该噪声是引入热噪声随机误差的误差源。合成器输出的合成信号经移相、放大等处理后送至和差器,将两测角子阵的相位差变换成了差路信号的幅度。和路与差路信号经放大、π/2移相和角误差检测器后输出角误差信号,其中的随机信号分量会使波束抖动形成角跟踪随机误差。

图1 相控阵角跟踪随机误差信号形成的原理
图1中,对于合成器输出的热噪声,当中频带宽远小于中频频率时,这种窄带噪声可表示为
N(t)=Vn(t)sin[ω0t+φn(t)]。
(1)
式中:Vn(t)为幅度随机变量;φn(t)为在0~2π内取值的相位随机变量。上式可展开为下列两个正交分量:
N(t)=x(t)cosω0t+y(t)sinω0t。
(2)

中频载波信号可以表示为
(3)
窄带噪声为加性噪声,它与信号相加为
R(t)sin[ω0t+φ(t)]。
(4)
式中:

(5)
相位噪声的方差为
(6)
根据随机变量数字特征的定理:常量与随机变量乘积的方差等于该常量的平方与随机变量方差的乘积[3],故当式(6)的N用方差量度时,相位噪声也是方差。
式(6)给出了相位噪声方差与S/N的关系,据此,对于图1中的测角子阵I,当它在中频带宽BI中的输出信噪比为(S/N)1时,则中频载波的相位抖动均方根误差值为
(7)
同理,对测角子阵II有
(8)

(9)
相位检波检测出上式的相位噪声,它是一个低频噪声,其基带带宽为BI/2,经过角跟踪环路滤波后的输出为
(10)
式中:BI为中频等效噪声带宽;BA为角跟踪环路等效噪声带宽。
角跟踪环路跟踪时,会使相控阵天线偏离基准轴σθ1角度以抵消上式的相位误差值,使角误差检测器输出为零,从而使环路工作到新的稳定点。由于角跟踪误差的角度很小,热噪声引起的相控阵角跟踪随机误差可近似为
(11)
上式为目标在阵面法线方向时的角跟踪热噪声误差,D为相位干涉仪的基线长度,这里是阵面上两个测角子阵相位中心点间的距离,它等于相控阵全口径长度L的一半。当目标偏离阵面法线θ时,角跟踪的作用等效为投影面转动θ[1],在投影面上的基线长度将变为D(cosθ),式(11)中的D也要相应变为D(cosθ)。
同样的情况,式中的(N/S)Σ1和(N/S)Σ2也为目标在阵面法线方向时,两个测角子阵各自输出的合成噪信比。当目标偏离法线θ时,相控阵存在增益扫描损失,其增益扫描因子为(cosθ)n,其中n的典型值为1~1.3,理想值为1[4],故(S/N)Σ将按cosθ减小,这时式(11)中的(N/S)Σ1也相应变为(N/S)Σ1(1/cosθ),同理(N/S)Σ2变为(N/S)Σ2(1/cosθ)。
另外,目标偏离指向轴也会使S/N下降,这是因为用公式(11)计算时,式中的S/N是天线方向图中增益最高的指向轴方向所接收的S/N,而跟踪目标时是电轴指向目标的,由于指向轴与基准轴的偏差以及基准轴与电轴间的跟踪误差导致电轴偏离指向轴,从而使接收到的S/N下降,下降值与偏移角Δθ有关,下降因子为G(θ+Δθ)/G(θ),G(θ)为指向轴方向的天线增益。这时式(11)中的[(N/S)Σ1+(N/S)Σ2]要相应地乘以[G(θ)/G(θ+Δθ)]。
将上述对基线和N/S的讨论结果代入式(11)可得到热噪声引起的角跟踪随机误差的表达式如下:
(12)
式中:D为阵面上的基线长度;θ为目标偏离阵面法线的角度;Δθ为电轴与指向轴之间的偏离角;G(θ)为指向轴方向的天线增益;G(θ+Δθ)为偏离Δθ方向时的天线增益。公式(12)是相控阵角跟踪热噪声误差的一个较完整的表达式,可用作工程设计计算。
需要指出的是,式(12)中的S/N是有了合成损失后的S/N,合成损失包括:各T/R通道间和阵元间的相移和增益不一致性,可用提高稳定性和校相、校增益以及数字化来予以改善;增益不一致还可在各T/R通道增加自动增益控制(Automatic Gain Control,AGC)来解决,但会使系统复杂。测角子阵中各阵元的增益不一致时(例如曲面阵中各阵元的指向不同),它引起各阵元通道的输出信噪比不同,致使合成信噪比不是最佳。为使合成信噪比为最大,可采用最大比值合成,即在各阵元通道中根据各自的信噪比设置不同的最大比值加权系数,使信噪比大的阵元通道对合成信噪比的贡献大(加权衰减小),而信噪比小的通道的贡献小(加权衰减大),从而获得最大的合成信噪比[5]。
在得出上述相控阵相位和差单脉冲的热噪声跟踪误差表达式后,可以与相控阵幅度和差单脉冲进行比较。
对于幅度和差单脉冲体制,其热噪声引起的角跟踪误差为[6]
(13)
式中:Km为角误差检测斜率,对于比幅单脉冲四喇叭抛物面天线,目前工程实践中给出的实际值在1.2~1.57之间[6-7];(S/N)Σ为全阵合成信噪比。
当采用口径为L=2D的相控阵天线时,波束宽度为
(14)
将式(14)代入式(13)得
(15)
为便于比较,在两个测角子阵输出S/N相同的条件下进行讨论,这对于理解其物理实质有指导意义。这时相位和差单脉冲的角跟踪热噪声误差可由公式(11)得到,即

(16)
式中:(S/N)Σ1为子阵I和子阵Ⅱ的合成信噪比;(S/N)Σ为全阵合成信噪比。
根据上述,就可以在相同天线口径L=2D、λ、BA、BI和(S/N)Σ的条件下,对公式(15)和公式(16)进行比较。用1.2~1.57之间的Km对比式(15)和式(16)可见,如比幅单脉冲的Km能达到1.57,则它的热噪声角跟踪误差均方根值将比相位和差单脉冲要小13%;若为1.2,则其误差将要大16%,所以这两种方案的热噪声角跟踪误差是差不多的。这是因为虽然相位和差单脉冲只用了半个阵面的S/N,但相位干涉仪的角灵敏度高,抵消了S/N的损失。但相位和差单脉冲方案大大简化了多波束形成设备,从而降低了成本,而降低成本,历来就是相控阵的一个重大课题。而且相位和差单脉冲的误差信号是由信号的空间时延形成的,而幅度和差单脉冲的误差信号是由设备的差波束形成的,并随扫描角而变,因此设备制造引入的误差源较多,所以相控阵角跟踪多采用相位和差单脉冲方案。
除此之外,噪声中还有信号的相位噪声(短稳)。由于两个测角子阵输出信号的短稳是相干的,在跟踪对准目标时,这两个相干信号相差90°,它们相乘的输出为零,不会产生误差信号,因此理想情况时不会产生角跟踪误差。
2 随机误差分析
2.1 动态滞后变化引入的随机误差
当目标的角速度、角加速度变化时引起相应的误差随时间变化,它表现为一种随机误差。角速度变化和角加速度引起的误差变化由下式确定:
(17)
(18)
它们总的误差为
ΔθΣ(t2)=Δθv(t2)+Δθa(t2)。
(19)

由公式(17)~(19)可求得在给定的目标动态下(即角速度、角加速度随时间的变化值)动态误差变化值ΔθΣ与时间的关系,如表1所示。
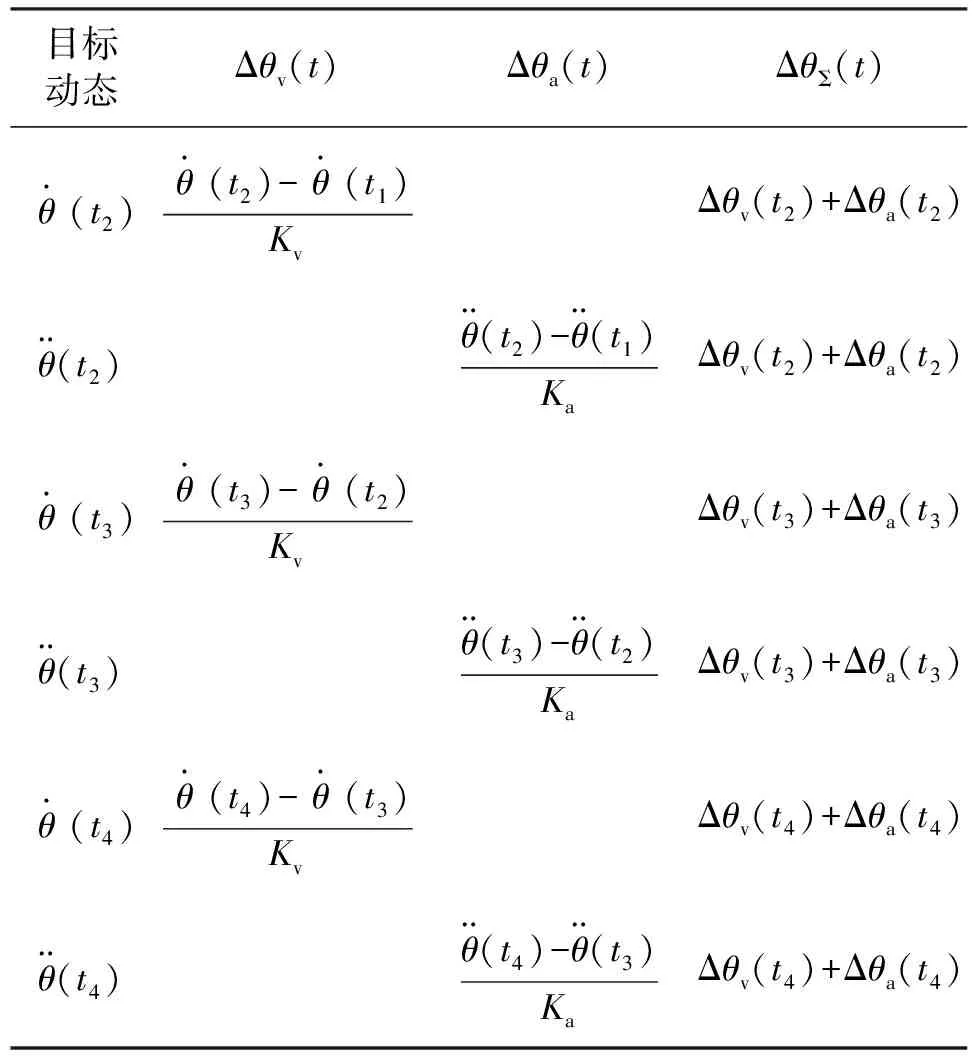
表1 动态滞后变化与时间的关系
从表1可知,由于目标的动态是随机变化的,使ΔθΣ值随时间的变化是一个随机变量。在已给定目标速度和加速度变化值的条件下可计算得出上表,据它求出它的数学期望、方差、最大值、最小值,从而得到该随机误差的表征数字。
需要指出的是,由于相控阵角跟踪环路是一个全电子环路,没有机械谐振频率和机电惯性环节的限制,其K和ωn可以做得较大,动态误差可以做得较小,从而动态误差的变化也较小,它引入的随机误差也就较小。
相控阵角跟踪系统是一个离散自动控制系统,它对移相器的控制信号是离散采样的,采样间隔为T,对移相器的控制时间为τ,在随后的(T-τ)时间段内移相值不变。离散自动控制系统的理论指出,当采样频率1/T大于自动调节环路带宽的10倍以上时,离散自动控制系统可按连续自动控制系统分析[8]。但是,它们的跟踪误差是有区别的,如图2所示。
图2为二阶II型角跟踪环路的角跟踪误差曲线近似图,图中实例为跟踪一个角度匀速运动的目标θi(t),当τ≪T时,宏观表现为如图所示的阶梯状跟踪,与连续自动调节系统比较是一个阶梯式的逼近,从而引入了图示的附加角跟踪误差Δθm,它是一个随时间变化的周期性的波动信号,波动的周期为采样周期,波动的幅度随目标的动态变化而变化。对于图2所示情况,当T≫τ时,有
(20)
平均值为
(21)
由式(20)和式(21)可以求出当目标角速度和角加速度随时间变化时Δθ随时间变化的值,可以列出类似表1的表格。从式(20)可见,减小T(即提高采样1/T)可以减小这项角跟踪离散误差。
2.2 移相器量化误差引入的随机误差
由于各移相器的量化相位噪声互相独立,由文献[2]的公式(19)可得测角子阵I输出的合成量化相位噪声的均方差为
(22)

同理,测角子阵II输出的合成量化相位噪声为
(23)
式中:n1和n2为两测角子阵的阵元数。φ1Σ和φ2Σ相互独立,两者之差为其均方和,故两测角子阵输出信号相位差的方差为
(24)

(25)
由文献[2]中的公式(12)可得它引起的测角随机误差为
(26)
2.3 多径反射引入的随机误差
当反射信号由副瓣进入时,多径误差信号是一个随仰角变化的波动信号,其均方根值可用下式估算[6]:
(27)
式中:ρ为反射系数;GSL为主瓣增益与反射信号方向副瓣增益的比值;θ0.5为主瓣宽度。
当反射信号是由主瓣进入时,其跟踪误差主要是目标信号和反射信号相互干涉引起的闪烁误差,其误差较难计算,可用下式估算[6]:
(28)
式中:h为目标高度;φ为直达波与反射波的相对相位。
关于多径干扰信号的详细分析请参阅文献[6]。
减少多径干扰的有效方法是降低多径方向的天线增益。相控阵天线比较特殊的是,它可采用波达方向估计(Direction of Arrival,DOA)技术估测出多径干扰的方向(即空间谱分析),然后用数字波束形成(Digital Beam Forming,DBF)技术形成波束哑点对准多径干扰方向(即空域滤波),使GSL加大,从而减小多径干扰引入的跟踪误差。
2.4 角度信号的量化误差
它由数字处理过程中的角度信号的量化引起。例如当采用摸拟与数字混合的角跟踪环路时,对其中的角信号进行量化将引入角度量化误差,它由下式估算[6]:
(29)
式中:LΔ为量化的最小有效位的值(单位:rad)。
如方案中不存在单独的角度量化单元时,该误差也就不存在。
2.5 阵风引起的随机误差
阵风是在稳态风上的起伏分量,它在天线阵面上产生变动力矩,使天线摆动,导致波束摆动,从而产生角跟踪随机误差。风力矩与风力、风速、风向、阵面大小及天线的传动机构、框架结构等有关,它的计算是很复杂的问题,有时还要通过风洞试验确定,其详细分析计算可参阅资料文献[6]。
相控阵角跟踪系统比较特殊的是,它没有机械传动结构,天线不转动,很多情况下还有天线罩,所以阵风引起的随机误差较小。
6 结束语
从以上分析结果可归纳出相控阵相位和差单脉冲角跟踪随机误差的下列特点:
1)相控阵的增益电扫描特性、电轴与指向轴间的偏差、信道的相位和幅度不一致性将引起输出的合成S/N下降,从而导致热噪声随机误差的加大;
2)相控阵电扫描将引起相位干涉仪基线缩短,引起相位干涉仪测角灵敏度下降,从而导致热噪声随机误差的加大;
3)相控阵的数字化将引起量化噪声误差;
4)相控阵角跟踪是一个全电子自动调节系统,与机扫天线系统比较,其动态特性较好,故动态滞后变化引起的随机误差较小,一般可不予考虑;
5)相控阵没有机电传动环节,所以比机扫天线系统抗风能力强,故阵风引起的随机误差也较小。
除上述特别的误差项外,相控阵相位和差单脉冲跟踪的其它随机误差项与机扫天线幅度单脉冲相当,可应用相关公式计算[6,9]。
文献[1-2]和本文对相控阵测控系统的角跟踪误差进行了分析,下一步将对其测速、测距误差进行讨论。
猜你喜欢
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
北京航空航天大学学报(2020年3期)2021-01-14
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年24期)2019-02-23
电子测试(2018年15期)2018-09-26
数学物理学报(2018年4期)2018-09-14
电子测试(2018年11期)2018-06-26
雷达学报(2017年3期)2018-01-19
制导与引信(2016年3期)2016-03-20
