
基于EMD-NLMS 的船舶发动机声信号降噪处理方法
2023-11-10 05:42叶昱清丁军航叶宁祁官晟
电子设计工程 2023年21期
叶昱清,丁军航,叶宁祁,官晟
(1.青岛大学自动化学院,山东青岛 266071;2.自然资源部第一海洋研究所,山东青岛 266061;3.山东省工业控制技术重点实验室,山东青岛 266071;4.自然资源部海洋环境科学与数值模拟重点实验室,山东青岛 266061;5.山东省海洋环境科学与数值模拟重点实验室,山东 青岛 266061;6.青岛海洋科学与技术试点国家实验室区域海洋动力学与数值模拟功能实验室,山东青岛 266237)
随着人类海上活动的繁荣,获得海事活动的相关信息,在环境保护、生产安全、国家权益等方面具有重要作用。
船舶声信号是海洋声环境监测的重要目标,也是船舶目标识别的重要信息。利用浮标、潜标、无人船等平台搭载声学传感器,能够第一时间发现并获得目标船舶声信号。这些无人自动观测节点是目前海基、空基、天基立体监测网络重要组成部分。
在实际采集到的船舶声信号中,不仅包含了目标船舶特有的声信息,还包含了大量的海洋环境噪声。由于海洋环境背景噪声较强,声介质极其复杂,接收到的船舶声信号通常具有非线性、非平稳和高噪声的特点,因此船舶声信号去噪是船舶声信号处理的前提和基本条件[1]。
1998 年,Huang 等人提出了一种新的信号分解方式——经验模态分解(EMD),为去噪提供了一种新的思路。在此基础上,2016 年,Yang 等人[2]基于EMD 算法和LMS 算法,提出了一种全新的对船舶声信号的滤波降噪方法——EMD-LMS 算法。2021 年,Ma 等人[3]把EMD 和NLMS 相结合提出了一种对非线性信号的滤波方法(EMD-NLMS 算法)。
该文将EMD-NLMS 算法应用在船舶声信号降噪领域,并且对比了LMS、NLMS、EMD-LMS、EMDNLMS 算法在船舶声信号降噪方面的优缺点。在没有噪声的船舶声信号中加入不同输入信噪比的高斯白噪声,分别使用四种方法进行滤波降噪,分析在相同输入信号的前提下四种方法的输出信噪比增益。得出EMD-NLMS 算法在船舶声信号的降噪上,相较于其他三种降噪方法有更好的信噪比增益,并且能够更好地反映原始信号中的各种细节。
1 理论与方法
1.1 经验模态分解算法
经验模态分解算法(EMD)将任意一个原始信号分解为若干个本征模态函数(IMF)和一个残余量[4-6]。分解得到的IMF 分量必须满足以下两个条件:
1)在整个IMF 数据段内,极值点的个数和过零点的个数必须相等或相差最多不能超过一个。
2)在任意时刻,由局部极大值点形成的上包络线和由局部极小值点形成的下包络线的平均值为零,即上、下包络线相对于时间轴局部对称。
EMD 算法的分解步骤如下:
1)求原始信号Z(t)的极大值点和极小值点,根据求得的极值点画出上包络线Zα(t)和下包络线Zβ(t),并求出上下包络线的平均值——均值包络线φ1(t):
2)在原始信号Z(t) 中减去φ1(t),求得中间信号h1(t):
3)判断中间信号h1(t)是否满足IMF 的两个约束条件,如果满足约束条件,则输出为IMF1;如不满足约束条件,将中间信号h1(t)作为新的输入信号重复步骤1)和2),直到输出的中间信号hm(t)满足IMF 的两个条件,输出结果为IMF1。
4)通过步骤3)得到了IMF1之后,使用原始信号Z(t) 减去IMF1作为新的原始信号l1(t),再重复步骤1)-4),直到得到的残余量ln(t) 为单调函数或者常数。这样经过EMD 算法就将原始信号Z(t)分解为了n个IMF 分量和一个残余量ln(t)。
EMD 算法分解得到的IMF 分量分别表示了原始信号中的各频率分量,并且按照从高频到低频的顺序依次排列,反映了原始信号的局部特征。EMD 算法具有良好的自适应性和完备性,分解得到的各个IMF 和最后得到的残余量相加能够获得原始信号的所有属性。
1.2 自适应滤波算法
自适应滤波器处理语音信号时,不需要事先知道输入信号和噪声的统计特性,滤波器自身能够在工作过程中学习或估计信号的统计特性[7],并以此为依据调整自身参数,已达到某种代价函数下的最优滤波效果[8]。自适应滤波广泛应用于噪声抵消、回声消除、谱线增强、通道均衡、系统辨识等方面[9-11]。
自适应滤波的原理框图如图1 所示,其中x(n)为输入信号,y(n)为输出信号,d(n)为期望信号,e(n)为误差信号。输入信号经过参数可调的自适应滤波器处理产生输出信号,输出信号和期望信号进行比较产生误差信号,经过自适应算法的自动调节使误差信号变小。
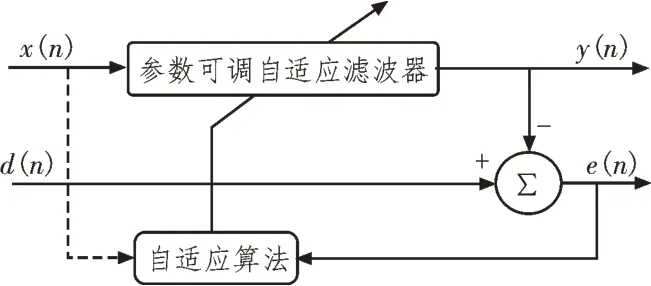
图1 自适应滤波原理
1.2.1 最小均方算法
最小均方算法(LMS)是在梯度下降算法的基础上提出来的[12],迭代方法如下所示:
其中,w(n)为滤波器系统的权系数矢量;μ为步长因子,μ需要满足式(8)的收敛条件,其中λmax为输入信号x(n)的自相关矩阵的最大特征值。
最小均方算法具有计算量小、公式简单、稳定性好等优点[13]。最小均方算法的性能只和步长因子μ、输入信号x(n)、误差信号e(n)有关,计算简单。
1.2.2 归一化最小均方算法
最小均方算法(LMS)有一个显著的缺点,每一次迭代都是固定的步长参数[14],这就需要在自适应滤波之前就要了解到信号的信息。为了克服以上缺点,在最小均方算法(LMS)的基础上提出了归一化最小均方算法(NLMS),迭代方法如下所示:
其中,η为可变的步长因子即修正步长因子;δ为一个较小的整数,需满足δ>0,δ的作用是防止输入信号x(n)的内积过小使得μ(n)过大而导致性能下降。
NLMS 算法相比于LMS 算法虽然复杂了一些,但是有更快的收敛速度[15]、更好的滤波效果,使得NLMS 算法在现实中获得了广泛的应用。
1.3 经验模态分解自适应滤波算法
经验模态分解自适应滤波算法原理图如图2 所示。在经验模态分解自适应滤波算法中要先对原始信号进行EMD 分解,得到n个IMF 分量ci(t)(i=1,2,3,…,n)和一个残差量,每一个时刻t的ct=[c1(t),c2(t),…,cn(t)]都为一个n×t的矩阵。再把自适应滤波系统当作一个并行多输入系统,将n个IMF 分量同时进行自适滤波处理,滤波之后得到的结果和残差量相加得到最后的系统输出结果:

图2 经验模态分解自适应滤波算法原理图
其中,ωi为第i个IMF 的权系数。
在选择自适应滤波算法时,选用了LMS 算法、NLMS 算法、EMD-LMS 算法和EMD-NLMS 算法,并比较了LMS、NLMS、EMD-LMS、EMD-NLMS 四种方法对船舶声信号的滤波效果。
2 实验分析
2.1 海洋环境背景噪声分析
在采集船舶声信号前,首先对海洋环境背景噪声进行采集并分析其特征[16]。使用型号为LoPAS-L(+)的超低功率自容式水声信号记录仪采集位于青岛海滨海洋环境背景噪声。
在该实验中,在船舶发动之前一小时将水听器置于水下3 m 的位置,采集船舶启动前的海洋环境背景噪声,分析采集海洋环境背景噪声特性。采集到的海洋环境噪声如图3 所示。

图3 海洋环境背景噪声信号
由图4(a)可得,海洋环境噪声的数据散点基本都位于细线附近,即采集到的信号满足高斯分布。由图4(b)可得,海洋环境噪声的频谱密度基本均匀分布。高斯白噪声主要有两个特性:满足正态分布、频率密度均匀分布。因此可以得出海洋环境背景噪声的特性与高斯白噪声的特性相同,在仿真实验中可以运用高斯白噪声代替不同大小的海洋环境背景噪声。

图4 海洋环境背景噪声正态分布图和频率密度曲线
2.2 仿真实验
为了验证LMS、NLMS、EMD-LMS 和EMD-NLMS四种滤波方法对水听器采集到的船舶声信号的滤波效果,需要进行仿真实验。在两段船舶原始信号中,添加输入信噪比为-10~10 dB 的高斯白噪声,模拟不同大小的海洋环境背景噪声。把添加了高斯白噪声的信号分别按四种方法进行滤波处理,分析输出信号的信噪比,比较前后四种方法的信噪比增益。船舶原始信号1 及其加噪信号和船舶原始信号2 及其加噪信号如图5 所示。

图5 船舶原始信号1和2及其加入高斯白噪声信号
分别使用LMS、NLMS、EMD-LMS、EMD-NLMS四种算法对两个加噪信号进行滤波。对于每次输入信噪比值的变化,四种滤波方法分别进行了100 次重复实验并求取所得到的输出信噪比平均值。表1和表2 反映了四种滤波方法对船舶原始信号1 和2中加入不同输入信噪比的高斯白噪声进行滤波后输出信号的信噪比增益。

表1 船舶原始信号1滤波100次实验输出SNR的平均值对比
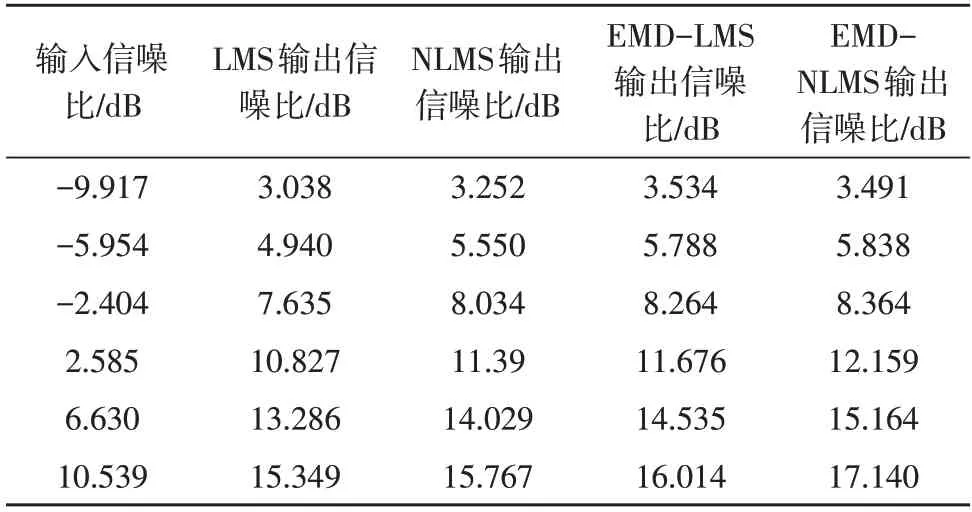
表2 船舶原始信号2滤波100次实验输出SNR的平均值对比
从表1 和表2 可以看出,与其余三种滤波方法相比,EMD-NLMS 算法在输入信噪比大于-5 dB 时,信噪比增益相较于其他三种算法有明显的改善。对于原始信号1,当输入信噪比为6.184 dB时,EMD-NLMS算法的信噪比增益为8.388 dB,相比于EMD-LMS 算法的7.954 dB,NLMS 算法的7.399 dB,LMS 算法的6.184 dB,EMD-NLMS 算法有更高的信噪比增益。对于原始信号2,当输入信噪比为6.630 dB 时,EMDNLMS 算法的信噪比增益为8.534 dB,相比于EMDLMS 算法的7.905 dB,NLMS 算法的7.399 dB,LMS 算法的6.656 dB,EMD-NLMS 算法有更高的信噪比增益。因此EMD-NLMS 对于船舶声信号的滤波效果要明显优于其他三种方法。
对两种信号的原始信号和EMD-NLMS 滤波输出信号进行傅里叶变换,结果如图6 所示。通过分析傅里叶变换得到的幅值和相位频谱可以得出,原始信号1 在经过EMD-NLMS 滤波之后能够较好地保留100 Hz 和210 Hz 频率上的幅值水平;原始信号2 在经过EMD-NLMS 滤波之后能够较好地保留220 Hz和450 Hz频率上的幅值水平。因此可得,EMDNLMS 算法能够较好地保留信号的频域特征,保留信号在不同频域下的幅值特性,保留了信号中的各种细节。

图6 傅里叶变换输出结果
3 结论
该文提出了使用EMD-NLMS 算法对船舶声信号进行滤波降噪,对采集到的信号进行EMD 分解,将分解得到的IMF 分量进行NLMS 滤波降噪处理,并合成输出为整个系统的滤波结果。为了验证该方法的优越性,对比LMS、NLMS、EMD-LMS、EMD-NLMS 四种算法,在原始信号输入不同信噪比的高斯白噪声,分别分析四种方法的输出信噪比,得出滤波效果最佳的为EMD-NLMS 算法。可以得出EMD-NLMS 算法可以作为提取船舶信号的较为稳健和优越的方法。未来可以将此方法运用于海洋物性监测平台的船舶声信号自动处理识别系统中。
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17
噪声与振动控制(2022年3期)2022-07-04
今日中国·法文版(2020年7期)2020-07-04
中学数学研究(广东)(2019年21期)2019-12-16
新教育论坛(2019年35期)2019-09-10
现代机械(2018年1期)2018-04-17
地震研究(2017年3期)2017-11-06
应用海洋学学报(2015年1期)2015-11-22
电力建设(2015年2期)2015-07-12
深圳大学学报(理工版)(2015年5期)2015-02-28
