
基于麦克纳姆轮的AGV 小车设计*
2023-11-12 15:17辛强赵琛李思颖张星晨赵泽阳
数字技术与应用 2023年10期
辛强 赵琛 李思颖 张星晨 赵泽阳
1.国核电站运行服务技术有限公司山东分公司;2.国核电站运行服务技术有限公司
AGV 作为自动化行业的智能设备,是连接生产和物流的关键环节,可实现工作效率最大化的目的。本文以基于麦克纳姆轮为运动单元的AGV 小车为研究对象,针对常见的AGV 工业应用场合,探索激光导航定位下的AGV 控制系统和伺服驱动结构的一般性问题,并提出以模糊PID 为运动控制策略对AGV 小车动态调节的影响。
近年来,自动化水平要求的不断提高促使了生产效率的大幅提高,工业生产应用也逐步形成了自动化机器替代人工的趋势[1,2]。AGV(Automated Guided Vehicle),也叫作自动导航车,依靠设备内的控制系统实现自动运输、自主移动的功能[3,4]。为了让智能车按照预设轨迹到达目标位置,定位和导航就成为了AGV 小车研究的最基本内容,并且可靠的定位和地图构建技术也成为近年来无人驾驶领域的研究热点[5]。
1 AGV 小车方案设计
1.1 AGV 小车整体需求分析
本文针对AGV 小车的一般性问题,设计主要针对机器人的移动运载底座及运输小车为主要功能的全自由度AGV,在功能上具有以下要求:
(1)能够适应多种地形,并且在狭小复杂的空间中可以自由运动和启停;
(2)能够精确定位,重复定位精度高;
(3)可自主避障,运动路径最优;
(4)运动平稳可靠,转弯半径小,控制灵敏;
(5)可自行供电,具有一定的承载能力。
1.2 AGV 小车方案设计
小车的整体设计方案根据整体需求进行确定,主要包括控制系统、驱动系统、动力系统、专项/避障系统和车身等,如图1 所示。AGV 小车的整体由上下两个部分组成,上部留有安装孔和卡槽,作为负重面承担物体的运输、机器人装置的位置控制等;下部为车体,包括4个麦克纳姆(Mecanum)轮系、4 个无刷电机、4 个驱动控制器、DSP 控制主板、各类传感器和提供动力的蓄电池。

图1 AGV 系统组成Fig.1 AGV system composition
AGV 小车的驱动通过4 组Mecanum 轮系+驱动控制模块的组合实现转向、前进、后退和原地正反转运动等操作[6]。控制系统以基于DSP 的控制主板作为AGV小车的核心部分,控制主板通过产生四路脉冲宽度调制(PWM)调整驱动控制模块信号来控制无刷电机转速和方向,相应的光电编码器读取的无刷电机数值也会反馈给DSP 微处理器,精确控制Mecanum 轮系的速度和运动方向。WiFi 模块的加入可建立局域网,让上位机与本地AGV 装饰形成一个ROS 分布式系统,接收DSP 单片机上传的包括位置传感器、激光导航仪、IMU 单元等模块读取的数据,从而实时调整AGV 小车位置。在确定AGV 小车方案设计前需要对运行环境、功能应用、各零部件具体尺寸等进行全面了解,保证满足实际应用的同时还能缩小AGV 小车整体结构,使车体的运动轻巧灵便。AGV 小车的系统结构图如图2 所示。

图2 AGV 系统结构图Fig.2 AGV system structure diagram
1.3 AGV 定位与路径跟随方案
对AGV 来说,定位导航技术的应用是路径跟随的基础,其好坏直接决定了AGV 的精确性和性能稳定性,同时也决定AGV 功能性、应用实用性、自动化程度等关键因素[7]。本文所设计的AGV 采用4 组麦克纳姆轮的驱动机构,通过编码器获取每个车轮的里程增量,进而根据麦克纳姆轮运动学公式进行航迹推算AGV 运动的实时位置(AGV 的自身位置参考所建立环境的电子地图),通过对目标点的设置即可实现路径跟随。与此同时,在车体的前后均安装有激光扫描仪,实现自主行驶过程中的避障功能,其跟随工作流程如图3 所示。
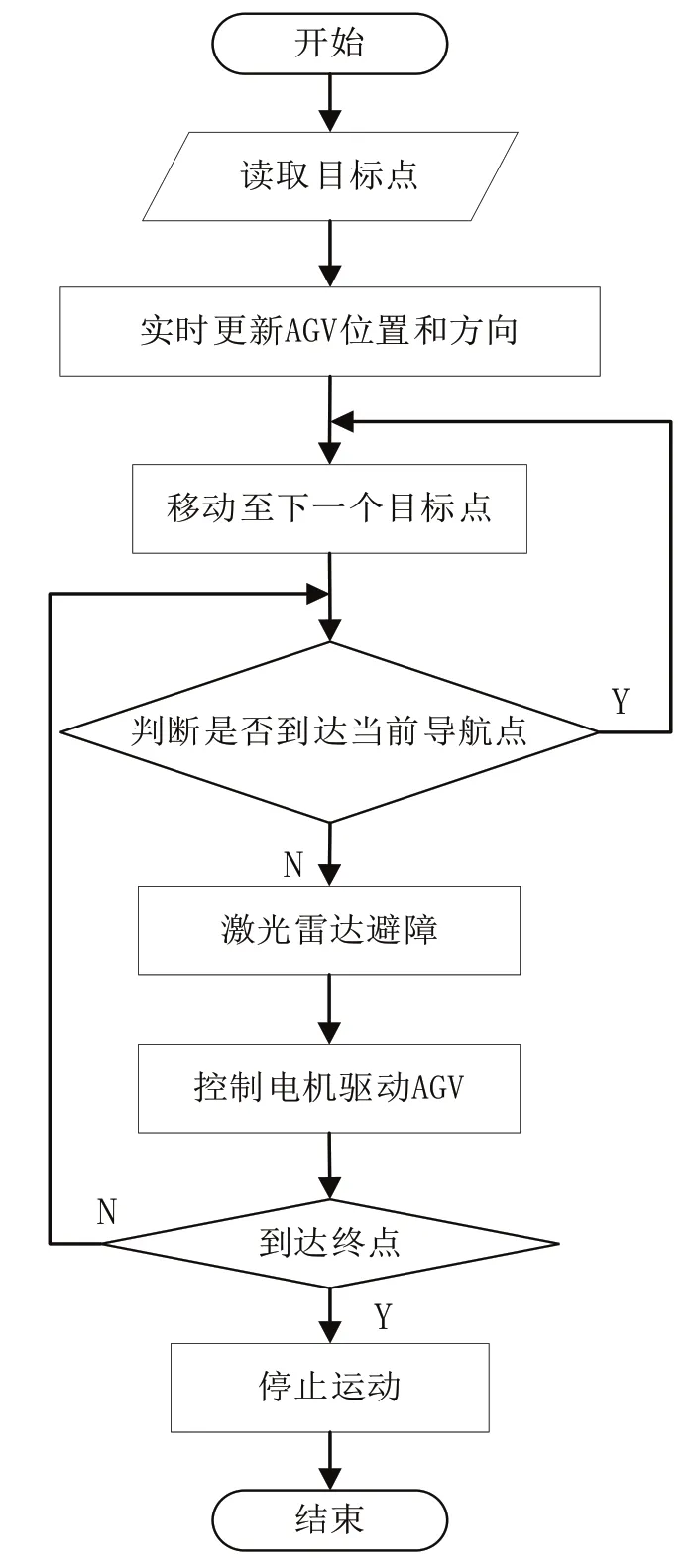
图3 AGV 路径跟随工作流程Fig.3 AGV path following workflow
在AGV 运行前,先建立电子地图和设置目标点数据,上位机程序通过读取目标点位置数据,再将四个编码器读取的麦克纳姆轮里程数传输至上位机,发出AGV从当前位置移动至目标位置的命令,在避障自主运动过程中通过麦克纳姆轮正运动学公式实时求解全向移动AGV 的位置和方向,判断是否到达目标点位。如果AGV 当前位置和目标点位仍存在位置和角度的差值,将继续驱动控制AGV 向目标点位运行,直至到达目标点后停止并等待后续上位机操作指令。
2 AGV 控制系统研究
2.1 控制系统的选择
市面上现有的机器人控制系统一般包括集中式和分布式控制结构两种方式[8,9]。集中式控制结构采用PCI 搭配与之相兼容的操作系统,主要包括运动控制主板、伺服运动孔子模块、通讯模块、传感器模块、上位机操作系统等组成,系统的运行和命令的执行均通过PCI 总线进行运算处理和分析。集中式控制结构具有结构组成简单紧密、性价比高、兼容性强等优点,但抵御风险的能力偏低,特别是复杂的工况环境,一旦控制模块出现故障,整个机器人控制系统均会瘫痪。相对而言,分布式控制结构在物理层、功能层等都是独立分散的,之间采用网络方式进行通讯连接。分布式控制结构主要基于驱动控制分散化和系统管理集中化的方案,以此实现控制器与驱动器组合协调的实现AGV 车轮的运动控制,并通过上位机控制系统进行AGV 的综合管理。根据现场实际应用环境和全向AGV 的运动控制方式,控制系统采用工业以太网和现场总线的方式,以达到实时、稳定、安全、高效、高精度和高灵活度的运动控制。
全向AGV 小车的核心部分是控制系统,主要由通讯系统、上位机控制PC 和电气伺服驱动控制系统三部分组成。通讯系统完成本地和现场的远程通讯;上位机控制PC 负责人机交互实施,包括网络配置、系统配置、参数设置、指令输入、状态显示等;电气伺服驱动控制系统由无刷直流电机和驱动模块组成,执行控制器发出的运动指令,并通过编码器反馈无刷直流电机的状态参数给控制器。控制系统结构如图4 所示。

图4 控制系统结构图Fig.4 Control system structure diagram
2.2 AGV 伺服系统结构
全向AGV 小车的定位是通过位于车体上的激光导航仪和避障传感器来实现。在建立环境的电子地图后,激光导航仪确定全向AGV 小车在全局坐标系下的当前位置,通过反馈的位置参数与期望位姿的角度、位置偏差来确定AGV 小车的运动控制参数,并进行实时调整AGV 运动,知道完成自动导航和精准定位,其伺服系统控制结构如图5 所示。
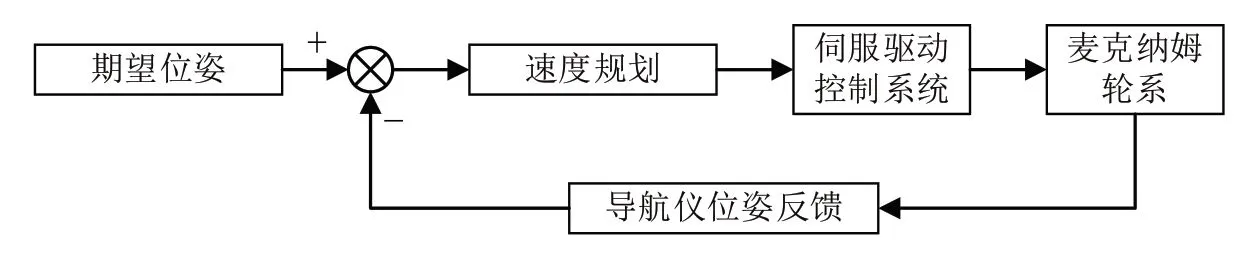
图5 激光导航伺服闭环控制结构Fig.5 Laser navigation servo closed-loop control structure
全向AGV 小车单轴伺服驱动控制结构如图6 所示。该结构包含了电流环和速度环,其中,电流环由集成于伺服驱动器中的霍尔元件作为反馈部件,通过调节直流无刷电机的电流来提高系统的机动性能。速度环由电机侧的光电编码器反馈直流无刷电机的实时速度信号,以此控制电机的转速。通过这两个闭环的控制,可以分别实现AGV 小车的扭矩控制和速度控制,从而获得期望的运动轨迹和目标位置。

图6 单轴伺服驱动控制结构图Fig.6 Single axis servo drive control structure diagram
3 AGV 控制策略研究
AGV 小车智能控制的关键环节就是路径规划和导引,这直接关系到全向AGV 小车的运行稳定性、精确性和智能性。由于传感器灵敏度存在一定误差和响应时间,AGV 小车的导引路线也会存在一定偏差,为了使AGV行径路线更加精准化,控制算法的引入也是非常有必要的。AGV 小车采用模糊PID 控制方法,比常规PID 控制的动态控制性能更好,并介绍了数据处理和存储要求,其导引算法控制结构如图7 所示。
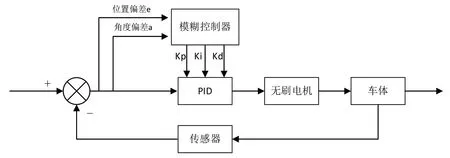
图7 模糊PID 控制系统结构Fig.7 Fuzzy PID control system structure
从图7 中可以看出,AGV 小车控制系统的输入量为角度偏差a 和位置偏差e,角度偏差a 为AGV 小车和导航轨迹的角度,位置偏差e 为AGV 小车中心点与导航轨迹曲线的偏差。在借鉴专家经验确定PID 三个参数Kp、Ki、Kd 分别为有关角度偏差a 和位置偏差e 的模糊规则后,然后以此作为输入量,实时修正Kp、Ki、Kd 的参数值[10]。经过模糊PID 运算后,可求解出AGV 小车角度调整量和平移调整量,结合AGV 当前位姿信息(x,y)重新分配各驱动电机的转速和方向,最终稳定精确地控AGV 按期望路径运行的目标。
4 结语
随着智能化行业的不断发展,基于麦克纳姆轮的AGV 小车作为平台的智能移动机器人具有非常重要的研究价值和理论意义。对于AGV 而言,实现精准化的运动、智能化的应用、灵活性的操作需要更为先进的系统控制方案和设计,通过结合不同应用场景进行功能创新,促使形成良好的工业应用。
引用
[1] 鲁飒.车间四轮独立转向AGV驱动单元运动稳定性研究[D].武汉:华中科技大学,2019.
[2] 徐舒洋.基于激光雷达的自主导航AGV研究[D].济南:济南大学,2021.
[3] 冯悦鸣,吕勤,李岩.基于AGV的复杂场景视觉SLAM惯导系统设计[J].电子设计工程,2021,29(11):146-150.
[4] 刘媛媛.激光自然导航AGV地图构建与定位研究[D].北京:机械科学研究总院,2020.
[5] 郭子硕.基于激光SLAM的AGV定位导航系统设计实现[D].杭州:浙江大学,2021.
[6] 邓国山,谌俊杰,周城.Mecanum轮全向AGV的运动性能分析[J].精密制造与自动化,2022(3):5-9+38.
[7] 李敬新.AGV小车在智能制造标准化中的应用[J].品牌与标准化,2022(4):13-14+17.
[8] 徐海天.基于激光SLAM的AGV导航及路径跟踪控制研究[D].长春:长春工业大学,2022.
[9] 杨骐豪.面向AGV的路径规划与自主避障方法研究[D].长春:长春工业大学,2022.
[10] 徐舒洋.基于激光雷达的自主导航AGV研究[D].济南:济南大学,2021.
猜你喜欢
阅读(低年级)(2022年6期)2022-06-17
阅读(低年级)(2022年3期)2022-03-30
知识窗(2021年4期)2021-10-02
高技术通讯(2021年7期)2021-08-30
现代信息科技(2021年21期)2021-05-07
家庭影院技术(2020年8期)2020-09-11
航天控制(2020年4期)2020-09-03
福建质量管理(2019年18期)2019-10-14
铁道通信信号(2019年1期)2019-03-21
石油化工自动化(2014年6期)2014-09-10
