谷物联合收获机自适应控制方式与技术分析
2023-11-24 06:20陶继哲
农机使用与维修 2023年11期
陶继哲
(黑龙江省农业机械工程科学研究院,哈尔滨 150081)
0 引言
《国民经济和社会发展第十四个五年规划纲要》明确指出要促进农业械化的提档升级,重点支持发展联合收获机械装备提升机械化、智能化与信息化水平,全面提高收获机械装备的综合性能,促进我国收获机械行业“数量”与“质量”水平的双重提升[1]。随着我国农业机械化发展,玉米、小麦、大豆等谷物类种植面积不断增加,谷物联合收获机使用率逐年提升,对谷物联合收获机的收获质量、劳动强度、生产效率与实际的持有量及投入量等提出更高要求。谷物联合收获机自适应控制不但提高收获质量和生产效率,而且降低劳动强度、生产成本和谷物收获损失率,全面优化谷物联合收获机的作业性能,为“机械化、智能化、精细化农业”发展提供技术参考[2-3]。
1 谷物联合收获机发展现状
谷物联合收获机(简称联合收获机)基于“联合收获法”能够在田间一次性作业过程完成谷物类作物切割、喂入、输送、分离、清选、除杂、脱粒和集粮等工作的功能复合型农业生产机械。目前,我国的联合收获机应用于稻麦类农作物收获,主要包括牵引式和自走式两种机型。其中,牵引式联合收获机是20世纪50—60年代由苏联引进到我国,通过拖拉机作为动力提供牵引,在田间一次性完成收获、脱粒、除杂和集粮等功能,但联合收获机与拖拉机配套使用存在整机结构紧凑性较差、动力转向灵活性较差、行驶底盘稳定性较差及田间适应性较差等问题,且现阶段农业生产中应用较少,仅适用于小型或家庭农田;自走式联合收获机是通过专用动力系统和行驶底盘,在田间一次性完成谷物全功能收获及全机械独立脱粒清选等农艺过程,具有整机结构紧凑、转向灵活、底盘稳定及田间适应性较好,现阶段农业生产中应用较多。
由于农业生产过程中工作环境恶劣、实际工况复杂且谷物收获时稻麦类农作物生长程度不同、含水率不同、种植密度不同及种植区域不同都会对谷物类农作物收获效果产生不同的影响,传统的谷物收获主要依靠农机操作人员根据谷物联合收获机工作状态及收获时稻麦类农作物生长情况等进行“主观”判断和调整,在实际作业过程中,使谷物联合收获机工作稳定性与可靠性差、易发生机械故障,影响谷物收获效率与质量等。针对以上问题,在谷物联合收获机作业过程中,利用多传感器信息融合技术、大数据挖掘技术、自动化与智能化控制技术等,开展谷物联合收获机自适应控制技术研究,在充分保证谷物收获效率与质量前提下,依据不同谷物类农作物籽粒损失率、破碎率、含杂率等收获数据实时调节脱粒系统作业参数,依据谷物联合收获机各个工作部件的工作状态实时监测与调整联合收获机,实现谷物联合收获处于“最优”控制范围,为我国农业机械化与智能化发展提供技术支撑,且应用前景广泛[4-5]。
2 谷物联合收获机自适应控制方式
谷物联合收获机自适应控制是一种基于谷物收获在线参数评估方法与控制系统设计方法的融合技术并兼顾“自校正”能力的控制方式。由于谷物收获时,农作物生长情况、收获机械运行状态及工作环境(天气状况、田间气候、地形特点)等被控对象具有不确定性,存在着大量的未知且随机的客观因素影响。在其实际运行过程中,谷物联合收获机通过自适应控制系统的数据采集与处理单元实时获取被控对象输入与输出状态,了解并掌握作业过程的综合信息,依据谷物收获在线参数评估与控制系统设计的方法,为适应环境参数变化,利用反馈单元的信息反馈动态更新系统控制器,谷物联合收获机做出相应控制决策,使谷物收获控制效果达到最优或近似最优状态[6]。目前,谷物联合收获机比较成熟的自适应控制方式有以下几种。
2.1 自校正调节控制方式
谷物联合收获机自校正调节控制是利用被控对象数学模型与递推估计算法对谷物联合收获系统参数进行在线评估,并通过评估对象系统辨识及对周围环境变化自动校准调节的闭环控制,以使系统达到期望控制目标的自适应控制方式,自校正调节控制单元结构如图1所示,自校正调节控制单元分为内环和外环两部分,其中内环主要由被控对象和线性反馈调节器组成,外环主要由联合收获机械执行机构和递推参数估计器组成,线性反馈调节器接收递推参数估计器信号进行反馈调节。在工作过程中,自校正调节控制系统自动完成系统建模与控制设计,自动校正系统参数,并在每个采样周期更新一次,以使谷物收获控制效果达到最优。
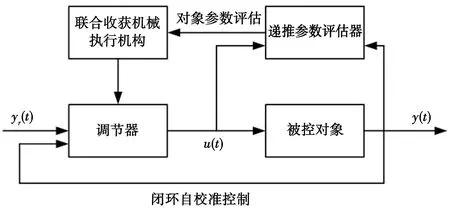
图1 自校正调节控制单元结构
2.2 模型参考自适应控制方式
谷物联合收获机的模型参考自适应控制是利用被控对象参考模型与自适应规律,通过非线性系统的稳定理论的方法,控制被控对象参数在自适应调节过程始终保持稳定,并使其参考模型极值收敛于目标参考值,以使系统达到期望控制目标的自适应控制方式,模型参考自适应控制单元结构如图2所示。其中,模型参考自适应控制单元主要由参考模型、被控对象、前馈控制器、反馈控制器及自适应机构等组成。在工作过程中,模型参考自适应控制系统依据系统初期建立的参考模型与自适应机构所应遵循算法,不断计算并优化系统参数,并在每个采样周期更新一次,以使谷物收获控制效果达到最优。
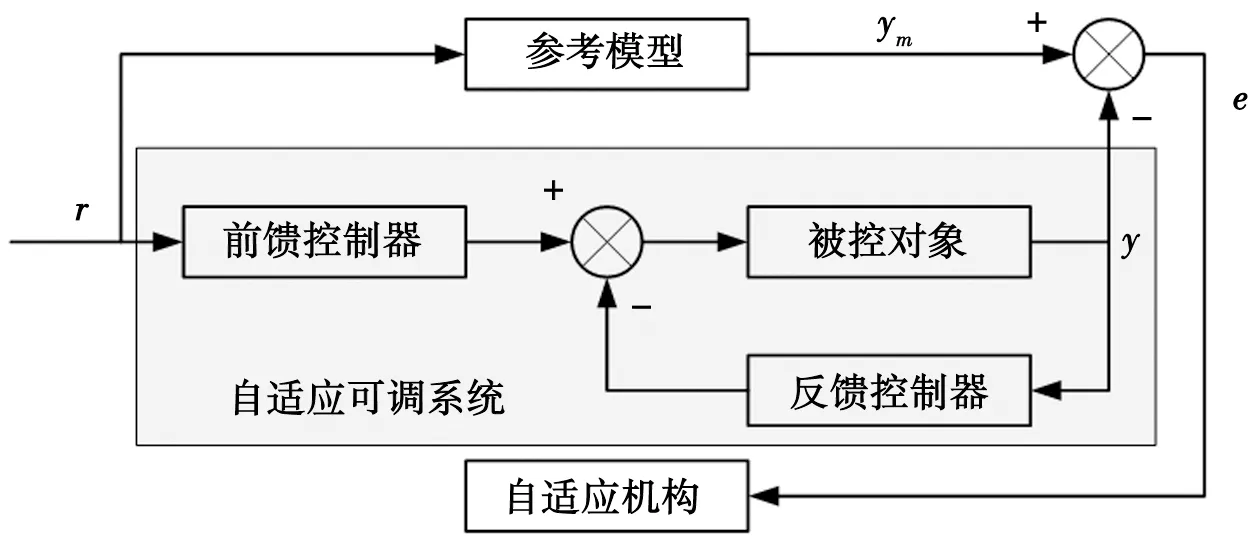
图2 模型参考自适应控制单元结构
2.3 自寻最优控制方式
谷物联合收获机自寻最优控制是利用被控对象输入与输出特性中至少一个非线性特性处于最优运行状态,即被控对象数学模型极值点,自寻最优控制系统自动搜索和保持系统输出位于目标极值的状态,以使谷物收获系统达到期望控制目标的自适应控制方式,自寻最优控制单元结构如图3所示。其中,自寻最优控制单元主要由反馈控制器、自适应优化控制器及被控对象等组成。在工作过程中,自寻最优控制系统采用自寻最优控制策略,结合实验分析经验数据自动保持系统工作在极值位置的最优控制量,并使运行状态的梯度趋于零,以使谷物收获控制效果达到最优。
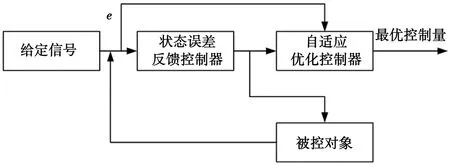
图3 自寻最优控制单元结构
2.4 可变增益自适应控制方式
谷物联合收获机的可变增益自适应控制结构简单、响应迅速,在各个领域应用普遍,通过系统中的一组或多组可变增益放大器,能够使谷物收获系统达到期望控制目标,可变增益自适应控制单元结构如图4所示。其中,可变增益自适应控制单元主要由可变增益机构(可变增益放大器)、调节器及被控对象等组成。在工作过程中,可变增益自适应控制系统中的调节器依据被控过程的参数变化规律实时进行系统设计,当被控对象(或控制过程)的参数(状态)发生变化时,系统程序自动改变调节器的增益,以使系统保持良好的运行状态和谷物收获控制最优效果。
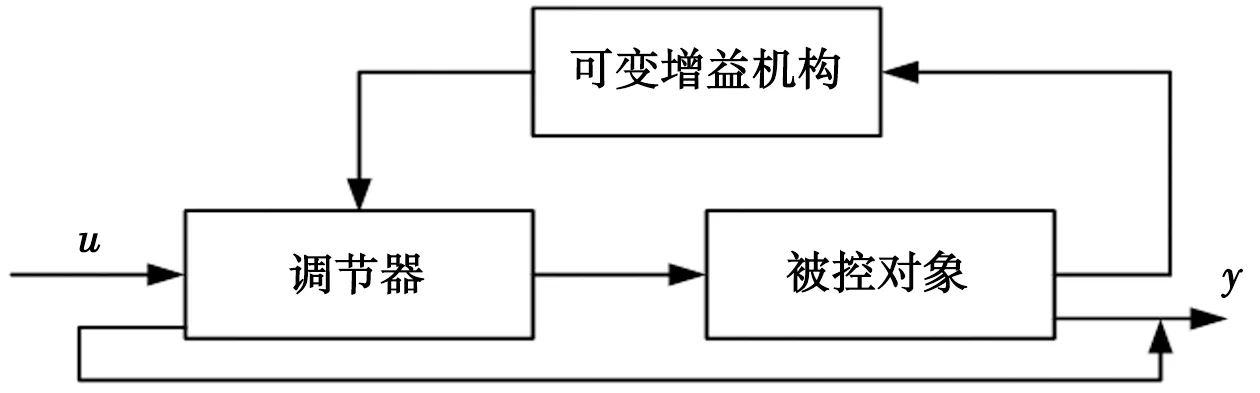
图4 可变增益自适应控制单元结构
3 谷物联合收获机自适应控制关键技术
谷物联合收获机自适应控制的关键一阶系统的自适应控制技术研究[7],分析重点是谷物联合收获机自适应控制系统一阶微分方程
y=-apy+bpu
(1)
式中y—为系统的输出函数;
u—为系统输入函数;
ap与bp—为系统参数。
3.1 问题描述
在谷物联合收获机自适应控制过程中,系统参数ap与bp均是未知数,期望控制目标一阶参考模型
yR=-aRyR+bRr(t)
(2)
式中aR与bR—为常数;
r(t)—为外部参考信号;
R—为参考模型传递函数。
谷物联合收获机自适应控制问题描述的关键是研究分析系统控制规律与自适应规律,使系统模型与参考模型的跟踪误差近似趋近于零。
3.2 控制规律选择
期望控制目标一阶参考模型基本控制规律
u=ar(t)r+ay(t)y
(3)
式中ar(t)与ay(t)—为系统反馈增益函数。
结合系统一阶微分方程式(1)与(3)整理得到系统闭环控制方程
y=-(aq-aybp)y+arbpr(t)
(4)
谷物联合收获机自适应控制规律选择的关键是实现系统闭环控制模型精确匹配,保证闭环控制系统数学模型与参考模型实时相同,从而,实现系统模型与参考模型的“零”跟踪误差。
3.3 自适应规律选择
系统模型参数误差与跟踪误差之间存在如下关系
(5)
式中p—为拉普拉斯变量。
其中,系统自适应控制规律表示
(6)
式中γ—为系统自适应增益常数;
sgn(bp)—正负决定控制器参数方向。
谷物联合收获机自适应规律选择的关键是依据经典自适应规律,求解系统的自适应增益常数,并确定适当的自适应控制器的方向。
3.4 跟踪收敛性分析
李雅普诺夫理论是分析系统稳定性与收敛性主要方法,自适应控制系统李雅普诺夫函数
(7)
谷物联合收获机自适应控制跟踪收敛性分析的关键是在系统模型求解过程中,保证跟踪误差全局近似收敛,并确保自适应控制系统的李雅普诺夫函数始终为连续函数。
4 结论
通过谷物联合收获机的发展现状的讨论,深入地分析了谷物联合收获机中的自校正调节、模型参考自适应、自寻最优、可变增益自适应等控制方式,详细地讨论了谷物联合收获机自适应控制中问题描述、控制规律选择、自适应规律选择与跟踪收敛性分析等关键技术,为谷物联合收获机的机械化与智能化应用提供了借鉴参考。
猜你喜欢
数学年刊A辑(中文版)(2021年1期)2021-06-09
数学物理学报(2019年3期)2019-07-23
电子测试(2018年15期)2018-09-26
数学物理学报(2018年3期)2018-07-17
军事运筹与系统工程(2016年3期)2016-09-26
电脑知识与技术(2016年10期)2016-06-16
自动化学报(2016年8期)2016-04-16
通信电源技术(2016年4期)2016-04-04
西北工业大学学报(2015年1期)2016-01-19
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23