
榴莲采摘机机械系统的设计★
2023-11-30 04:45于佳伟蒋东霖裴起超
机械管理开发 2023年10期
于佳伟,蒋东霖,裴起超,肖 迪
(长春师范大学工程学院,吉林 长春 130032)
0 引言
近年来,随着我国经济水平的不断提高,我国水果的种植面积和产量成为世界第一大国,同时,市面上开始涌现各类的水果采摘机,使得水果采摘既方便又迅速,而目前,因榴莲所处的地域环境复杂,且果实所处高度较高,因此只能采取人工的方式进行采摘,采摘者存在安全隐患且过程耗时费力的问题[1],而目前市面上存在的采摘榴莲的机器相对较少且无法彻底解决安全等问题,对此设计并研发了新型榴莲采摘机,此采摘机针对安全、便利、提高效率等问题做出有效处理。本文主要对榴莲采摘机的机械系统进行设计。
1 榴莲采摘机的整体设计
榴莲采摘机可以完成对榴莲是否可以采摘进行判断、抓取、采摘,运输和收集等工作。车体采用与货车相仿的结构,从而使得整个机器重心平稳,在工作过程中可以避免因重心不稳发生侧翻。如图1 所示,榴莲采摘机由传送系统、伸缩系统、采摘系统等组成[2],伸缩系统分别与传送系统和采摘系统相连,采摘者通过机械爪前端的摄像装置,将所录到的画面传输到终端,采摘者对榴莲是否可以采摘进行判断,并对机器进行操作控制,通过控制伸缩系统将采摘系统运送至相应高度位置,通过控制六轴机械臂,将机械爪传送到相应位置,通过控制爪手,调整方位,对榴莲进行抓取采摘,接着,机械爪将榴莲放置传送系统中,通过传送系统将榴莲放置收集系统,完成榴莲采摘,系统可同时进行工作,既提高了榴莲采摘效率,同时也降低了人工采摘危险系数,能够最大程度上的保持榴莲果实的完好。
为了满足以上工作要求,设计了此榴莲采摘机的机械系统,整体如图1 所示
2 榴莲采摘机主要组成部分结构设计
2.1 伸缩系统设计
伸缩系统如图2 所示,为一个三节伸缩杆,电动伸缩杆主要由驱动电机、减速齿轮、螺杆、螺母、导套、推杆、滑座、弹簧、外壳及涡轮、微动控制开关等组成。电动伸缩杆作为执行机械使用,用以实现远距离控制、集中控制或自动控制的有效装置,已经广泛应用于各种简单或复杂的工艺流程中。
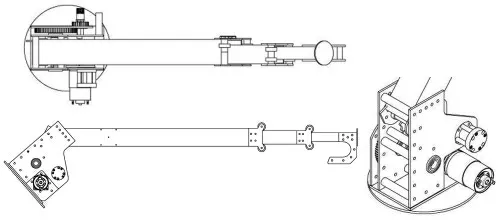
图2 伸缩系统
2.1.1 工作原理
电动机经齿轮减速后,带动一对丝杆螺母。把电机的旋转运动转变成直线运动,利用电动机正反转即可完成推杆的伸缩动作。另外,通过各种杠杆、摇杆或连杆等机构可完成转动、摇动等复杂动作。通过改变杠杆力臂的长度,可以增大行程。
2.1.2 行程控制装置
1)蜗轮蜗杆传动形式。电机齿轮上的蜗杆带动蜗轮转动,使蜗轮内的小丝杆作轴向移动,由连接板带动限位杆进行轴向移动,从而推动闸门上下移动。蜗杆传动具有自锁性,可使闸门停在任意高度上,而不会因自重落下。当所需行程时,通过调节限位块下压行程开关进行断电,电动机停止运转(正反控制相同)。
2)齿轮传动形式。电机通过减速齿轮后带动安装于内管的小丝杆,从而带动与之连接一起的螺母做轴向运行。当达到所设定的行程时,螺母触角压住限位开关断开电源,电机停止运动(反向与之相同)。
3)电动伸缩杆是一种新型的电动执行机构,可以使伸缩杆在一定范围行程内作往返运动。一般电动伸缩杆标准行程有1 m、1.5 m、2 m、2.5 m、3 m、3.5 m 以及4 m,根据榴莲树高的范围进行具体选举。可以根据不同的应用负荷而设计不同推力的电动伸缩杆,一般其最大推力可达6000N,空载运行速度为4~35mm/s,电动伸缩杆以24 V/12 V 直流永磁电机作为动力源,把电机的旋转运动通过丝杠转化为直线往复运动。本采摘机伸缩杆选用的标准行程为4 m,控制采摘系统到达合适高度,方便采摘,可以避免因榴莲高度而导致的采摘困难等问题。
2.2 采摘系统设计
采摘系统如图3 所示,主要由机械臂、机械手、和剪切机构所组成,剪切机构处包含信息收集模块,采摘系统主要对榴莲是否成熟进行判断并且对榴莲进行采摘。信息收集模块的功能是剪切机构处的视觉传感器对周围榴莲的情况进行收集,然后通过传输至终端的画面进行判断,将信息传送至采摘者。在该系统中,通过画面传送至终端的画面对榴莲成熟度的信息收集和判断,确定要采摘的榴莲,通过六轴机械臂转动调整整个采摘系统至榴莲的位置,随即机械爪抓住榴莲,同时,剪切系统进行运作,将榴莲梗剪断,此时榴莲采摘完毕。为了确保榴莲能够顺利被抓住和剪切,对机械手进行了夹持型设计,同时采用单片机控制,增加其可靠性。为了能够对榴莲的成熟度及剪切位置控制得当,采用视觉传感器进行辅佐,视觉传感器主要由摄像头、红外传感器、距离传感器组成,通过摄像头收集榴莲所处环境,为采摘系统进行工作,提供了信息基础,可以尽量避免由于榴莲树枝错乱而导致榴莲采摘不顺利,机器损坏等问题,同时,通过距离传感器与红外传感器相配合,可以使剪切系统更准确的对榴莲梗剪切。

图3 榴莲采摘机的采摘系统
2.2.1 机械臂
机械臂的力学设计模仿了人的手臂动作,通过设定某种程序,实现搬运、抓取等一系列的操作,实现劳动的机械化与自动化。也就是最早出现的现代化机器人,取代了人力劳动,实现繁重劳动的机械化与自动化,能在危险的环境中,使用机械进行工作,进而有效保障工人的人身安全,其普遍应用于机械制造、冶金、电子、轻工业以及原子能等部门。机械臂通常有几个自由度,用来抓取物体,因此对工业机械臂的理解可以是模拟人的手臂、手腕以及手功能的机械电子装置,可以将任一物件以及工具按照空间的位置进行移动,进而实现工业生产作业的要求。六轴机械臂是一种新型机械装置,可完成不同任务和复杂运动。机械臂如图4 所示通过建模设计分析。采用六自由度机械手臂,其组成包括六轴机构[3]。因采摘环境复杂,所以对机械臂的柔性要求较高,因此采用动力学建模分析。六轴机械臂主要由六轴组成,一轴是用于连接底座,承载较大,主要用于整个采摘及系统的旋转等运作方式;二、三轴的主要作用是前后摆动,同时也是机械臂的重要位置;四轴主要起自由回转的作用,其结构也相对简单;五轴,六轴主要起微调作用,且六轴可360°旋转,在任何工作环境下都可以适应所需工作。六轴机械臂与上文伸缩杆进行链接,整个系统的灵活性可以使整个系统精确传送至榴莲所处位置,进行工作。

图4 机械臂的机械系统
2.2.2 关于机械臂的应力分析
为了保证机械臂运动的稳定性,所选取的电机可以提供的扭矩远大于拿起榴莲所需要的力量,故将除校核部分以外的机械臂看作墙壁,以简化校核过程。以下对校核过程进行说明。
借由截面法对比结构内力进行分析,得到此结构的剪力图和弯矩图,如图5 所示由剪应力与弯矩图可知,危险点在机械臂的端面处,最大剪刀Ft=F,最大弯矩M=FL。
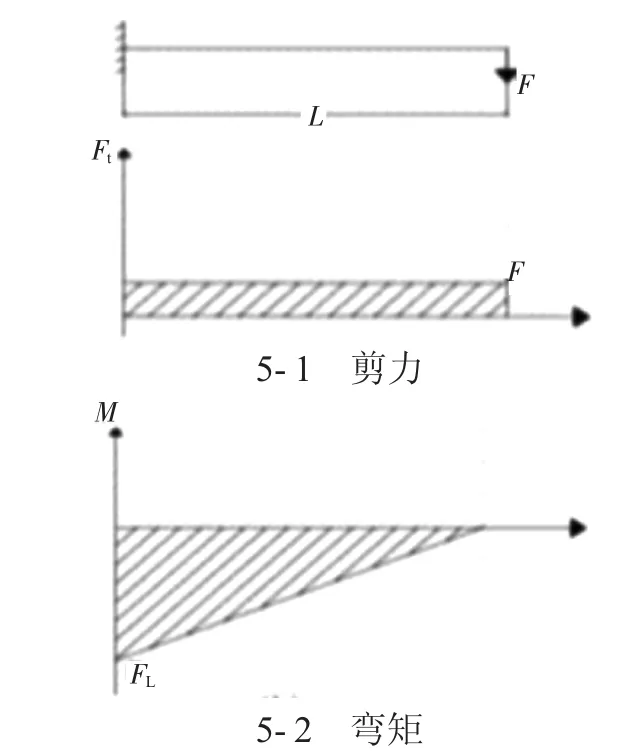
图5 结构的剪力图与弯矩图
式中:Ftmax为拿起榴莲时产生的最大拉应力;Mmax为榴莲拿起过程中产生的最大弯矩;l 为机械臂长,l=0.7 m;m 为榴莲与机械臂的重量和,取10 kg;g 取10 N/kg。
由式(1)、式(2)可得最大切应力,最大拉应力为Ft,max=200 N、Mmax=70 N·m。
为了简化计算,将机械臂的截面形状简化为圆形,A、W 分别是此结构的当量面积和当量抗弯模量。τmax为机械臂工作过程中产生的最大切应力,Ft为上式中的最大拉应力,σmax为机械臂运作工程中产生的最大正应力,M 为上式中所求的Mmax;D 为简化后截面圆的直径取0.1 m。
通过计算得出τmax=0.025 MPa,σmax=0.714 MPa,W=0.000098 m3。
经查得资料可知,Q235 的许用切应力及其拉应力为[τ]=110.6 MPa,[σ]=158 MPa。
经过比较,结构中的最大弯曲应力和最大切应力小于材料的许用应力,经校核,满足强度要求,可选用Q235 作为机械臂的材料。
2.3 传送系统设计
传送系统如图6 所示,主要有伸缩式皮带传送机组成,其工作原理与普通的皮带传送机相同,但是我们将传送带与伸缩杆相连,并且在其结构上增加了储存皮带的装置和收放皮带的装置,方便皮带进行伸长和收缩。伸缩杆与传送带可以同步进行调节告知位置,方便在采摘系统结束后,机械爪可随时将榴莲放置于传送装置上。同时,皮带所采用的材料为硅胶材质,增加皮带的粗糙度并且每隔一定距离设置挡板,防止在运输过程中榴莲向下滚落速度太快,而导致损伤。
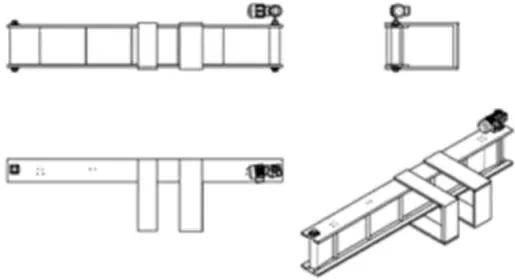
图6 榴莲采摘机传送系统
3 伺服电机
伺服电机作为带式输送机传动的动力装置,预设传送机卷筒直径D=380 mm,有效拉力Fw=10000 N,滚筒的效率ηw=0.96,输送带速度vw=0.2 m/s。根据工作条件和要求,一般选用Y 系列三相异步电动机。
选择电动机的容量。工作机所需的功率Pw为:
将相关参数代入式(6)得:Pw=2.08 kW。
电动机所需功率P0为式(7),从电动机至滚筒主动轴之间的传动装置的总效率η 为式(8):
据查表得知η带=0.95、η轴承=0.99、η齿轮=0.98、η联轴器=0.99,将相关参数代入式(7)、式(8)得:η=0.868,P0=2.4 kW。
选取电动机额定功率Pn,使Pn=(1~1.3)P0,则Pn=3.1 kW。
确定电动机转速。工作机卷筒轴的转速nw为:
将相关参数代入式(9)得nw=10 r/min。
经查资料,推荐的传动比合理范围,取v 带传动的传动比i带=2~4,单极圆柱齿轮传动比i齿=3~6,总传动比合理范围i'=18~144,故电动机转速nm=i'nw=(18~144)×10 r/min=180~1440 r/min。

表1 Y132M2-6 电动机主要性能及主要尺寸
符合这一转速范围的同步转速有750 r/min、1000 r/min 两种,通过考虑尺寸、结构和减速器的传动比等因素,因此选用电动机型号为Y132M2-6。
4 结语
本文主要介绍了一种榴莲采摘机,其具有安全系数高,采摘效率快,操作方便等特点,并且能够对采摘环境进行收集分析、从而高效、准确的对榴莲进行采摘。榴莲采摘机主要由三个系统所组成,通过视觉传感器对周围环境的观察,对榴莲成熟度信息的收集,并将信息传送至果农手中,接着由采摘系统进行采摘,传送系统进行运输,从而完成榴莲采摘一系列的运作。对比于人工采摘来讲,榴莲采摘机虽成本高,但其大大避免了人工采摘时的安全隐患,且提高了榴莲采摘的速度。但榴莲采摘机在传送系统的设计仍需完善,榴莲在传送系统中向下运输时也容易对果实造成损坏,在今后的研究中,需针对这一问题着重进行研究并改进。
猜你喜欢
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
启蒙(3-7岁)(2019年8期)2019-09-10
幼儿100(2019年35期)2019-02-11
小学生作文(低年级适用)(2018年11期)2018-12-05
山东冶金(2018年5期)2018-11-22
海峡姐妹(2017年7期)2017-07-31
西安建筑科技大学学报(自然科学版)(2016年1期)2016-11-08
铁道科学与工程学报(2015年4期)2015-12-24
智能建筑电气技术(2015年5期)2015-12-10
