基于PLC控制的车载无人机自动机库设计
2023-12-04 11:11金慧萍杨家富张文武
林业机械与木工设备 2023年9期
金慧萍, 杨家富, 张文武, 李 祥, 穆 键
(1.南京林业大学工程培训中心,江苏 南京 210037;2.南京林业大学机械电子工程学院,江苏 南京210037;3.南京普新机电有限公司,江苏 南京 210037)
无人驾驶飞机是一种利用无线电遥控设备或自备的程序控制装置操纵的不载人飞机[1]。随着电子技术的发展,无人机各方面的性能得到了极大的提升,不断向小型化、集成化方向发展[2],并在影视制作、测绘巡检、安检应急、植保喷药、森林防火、物流运输等行业应用日益广泛,极大地拓展了无人机的用途[3, 4]。无人机的户外作业环境,如军事侦察[5]、电力巡检[6]等多是在野外山区,在实际使用过程中受到环境的局限较为明显[7]。无人机在野外作业场合较多,起飞与停降都需要相对平稳可靠的平台,否则在起飞与停降过程中会伴随着“炸机”现象的发生[8],给无人机的起降带来极大的风险。当前无人机放飞、回收技术的发展程度相对落后于无人机的自身技术,多行业场景下的无人值守作业模式发展相对滞后,自动化程度低,大多数的应用场合均不同程度地依赖于人工操控。
为了妥善解决无人机户外作业过程中难以自动放飞与回收的问题,给无人机提供一个稳定可靠的停放平台,近年来,无人机移动机库产品逐渐进入了市场。高伟等[9]研制了多旋翼无人机多功能起降辅助平台,能有效降低无人机故障发生概率,提高巡检作业效率。宋晨晖等[10]设计了无人机无人值守自动起降机场,可以实现无人机自动降落及收回,有效解决无人机续航时间短、需人工现场操作等问题。
目前市面上的无人机自动机库大多采用箱体结构,设备成本高,市场应用推广难度大,且设备搬运及作业过程中对人工操作的依赖程度高,与此同时,可直接安装在车厢内的移动车载式自动机库产品案例较少。本研究以依维科商务车为车载平台,设计了一种适用于该车型的车载无人机自动机库,融合PLC控制、人机交互、网络通信及远程监控等技术,有效实现了无人机自动平稳放飞和停降,解决了无人机返航过程中降落姿态随机和桨叶散开不确定的问题。
1 机库硬件设计
1.1 工作流程
车载无人机自动机库的工作流程为:待工作状态下,无人机停放于车载机库的停机平台上,执行一键放飞命令后,载车车顶的天窗自动打开,升降机构上升,归中夹紧机构自动解锁放开,放开到位信息传输至无人机控制终端,无人机启动放飞作业流程;无人机起飞后,升降平台下降,载车天窗自动关闭;无人机收到返航信号后,载车天窗自动打开,机库升降平台上升,待无人机飞回至停机平台上后,归中夹紧机构分别向X、Y向收拢,无人机归中,随后拨桨机构将桨叶拨至回收边界内,升降平台下降归位,载车天窗自动关闭,无人机放飞与回收流程全部完成。
1.2 机械结构设计
车载无人机自动机库的机械结构由底座、双轨剪叉式升降机构、停机平台、归中夹紧机构以及拨桨机构组成。底座是整个自动机库的承载结构,安装于车厢内的设备承载平台上;升降机构采用双轨剪叉式结构形式,可实现有限安装空间内大行程范围升降的功能;停机平台位于升降机构的上方,用于停放无人机;归中夹紧机构由两个相互垂直交错的同步带传动执行机构组成,可实现无人机降落后X、Y向的位置归中和无人机底座的夹紧固定;拨桨机构由两组直线运动的同步带传动执行机构组成,可实现无人机在归中夹紧后桨叶位置调整的功能。车载无人机自动机库机械结构如图1所示。

图1 车载无人机自动机库机械结构图
1.3 控制系统硬件配置
通过分析无人机自动机库的机械结构和工作流程,对自动机库控制系统的硬件进行配置。控制系统以PLC控制器为核心,由PLC控制器、触摸屏、伺服驱动器、继电器及磁性开关等组成。PLC控制器选用基于模块化紧凑型设计的西门子S7-1200PLC模块,型号为6ES7214-1AG40-0XB0,该模块具有功能强大、可靠性高、灵活度高的特点[11];采用西门子KTP400型号触摸屏作为HMI(Human-Machine Interface)人机交互界面的载体,通过RS485串口与PLC进行通信,将内部存储器的数据发送到PLC控制器,使PLC执行相应的控制程序;采用CM1241(RS422/485)作为通信模块,PLC作为主站,伺服驱动器作为从站,通过Modbus-Rtu总线通信协议向伺服驱动器读写相关控制参数,以实现对无人机自动机库的升降伺服电机、归中夹紧机构的X/Y向伺服电机以及拨桨机构伺服电机的控制,最终实现升降、对中、拨桨动作。无人机自动机库控制系统的硬件组成如图2所示。
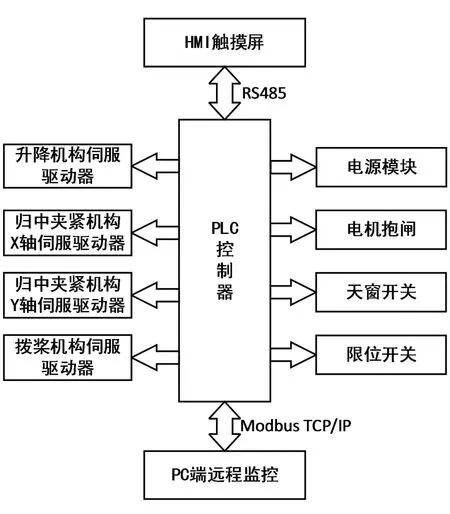
图2 控制系统硬件组成
2 机库控制系统软件设计
无人机自动机库控制系统软件设计包括PLC控制程序设计、人机交互界面设计及监控系统设计三个部分。PLC控制程序设计主要实现对各个执行机构的伺服驱动器发送运动控制指令,实现运动控制;人机界面设计可以用于现场对设备进行手/自动操作、参数设置以及机库运行状态监控等;监控设计可以分别获取无人机和机库的运行相关参数,实现机库和无人机之间的信息交互。
2.1 PLC控制程序设计
采用TIA Portal V16软件,使用梯形图语言对PLC进行程序编写。PLC程序包括初始化程序、手动控制程序和自动控制程序3个部分。上电后首先执行系统初始化程序,保证所有动作机构在运行前保持最初始状态;其次,设置好伺服系统通讯参数,监控伺服系统的状态;最后,通过开关按钮选择手/自动控制方式,手动控制方式下,设计各执行动作的手动运行程序,自动控制方式下,根据无人机放飞与回收的流程需求,设计自动控制程序,实现一键放飞与回收的操作。系统程序整体流程如图3所示。

图3 控制系统程序流程图
对无人机自动机库控制系统的功能需求进行分析,需使用18个数字量输入信号,6个数字量输出信号,控制系统的I/O配置如表1所示。

表1 控制系统I/O控制表
2.2 人机交互界面设计
为了增强自动机库的实时操控性,设计了HMI人机交互界面。人机界面和PLC之间通过Modbus通讯协议实现信息交互,当选择为本地控制状态时,通过操控触摸屏上的执行按键,对机库进行运动控制。人机界面主要包含手动操作界面、自动操作界面以及参数设置界面,当开关按钮选择为手动控制时,分别操作手动界面的各执行按键,实现对机库的停机平台上升/下降控制、无人机归中/复位控制、车顶天窗打开/关闭控制、拨桨正行/反行控制,手动界面如图4a所示。当开关按钮选择为自动时,触摸自动控制界面的“自动放飞”键,机库执行自动放飞工作流程;触摸“自动回收”键,机库执行自动回收工作流程。自动控制界面显示设备的运行状态,包含设备当前状态、手/自动状态、急停状态、天窗状态、归中状态、升降台状态、拨桨状态以及系统故障状态,自动控制界面如图4b所示。

图4 控制系统人机交互界面
2.3 监控系统设计
监控系统分为现场监控层和远程监控层。现场监控层由触摸屏、信息采集元件、执行元件和PLC单元组成,获取机库现场的运行状态;远程监控层由GPRS智能网关、云平台服务器和移动显示终端组成。监控系统设计如图5所示。

图5 监控系统设计
通过Modbus总线通信协议中的TCP/IP协议来实现智能终端设备和PLC的通讯。以PLC作为服务器端,上位机作为客户端,采用通讯模块中的RS485作为通讯网口,在主程序中调用Modbus-TCP通讯模块,与PLC进行通信读写数据。在通讯中,首先设置IP地址,然后在程序中调用通讯模块进行数据传输,数据的传输方式是上位机读写数据,每22个字节连续一帖。PLC与上位机通讯数据如图6所示。

图6 通讯数据图
3 试验测试与分析
依据无人机自动机库系统实际使用场景,对归中夹紧机构动作及拨桨机构动作进行测试,测试场景如图7所示。

图7 无人机自动机库测试场景
3.1 归中夹紧机构动作测试
无人机停降后,其机体位于停机平台上的位置是随机的,而在停机平台下降回收至载车平台内部的过程中,需对无人机的停放位置进行归中夹紧。基于该种情况的停机条件,需对无人机降落在停机平台上的几类典型位置进行归中夹紧动作测试,以覆盖无人机在停机平台上不同位置的停降情况。考虑无人机停降在停机平台上位置的随机性,而归中夹紧机构的执行单元分为X、Y向的二维执行机构,无人机停放在停机平台上的位置形态相对于X、Y向归中夹紧执行机构的位置可分为4类,即无人机支架与X向归中夹紧执行机构的夹角为0°、0°~90°、90°、90°~180°和180°此4种情况,具体停放位置示意图如图8所示。


图8 无人机典型停降位置图
对无人机在停机平台上的典型停放位置分别开展测试,测试结果表明,在4类典型停放位置状态下,无人机均能在自动机库的归中夹紧机构动作下实现归中并夹紧。测试后的状态如图9所示。

图9 归中夹紧测试现场
3.2 拨桨机构动作测试
无人机停降归中夹紧后,其4只桨叶停留的位置是随机,而在停机平台下降回收于载车平台内部的过程中,需对无人机的桨叶位置进行拨桨处理。基于该种情况的停机条件,需对无人机降落在停机平台上后桨叶的几组典型位置进行拨桨动作测试,以覆盖无人机桨叶在平台上不同停留位置的回收情况。无人机停降于停机平台上,在完成归中夹紧动作后,无人机的4只桨叶停留的位置姿态可分为2大类,即部分或全部桨叶超出回收边界和全部桨叶均不超出回收边界两类状态,桨叶停留的位置姿态示意图如图10所示。

图10 无人机桨叶位置姿态示意图
当部分或全部桨叶超出停机坪边界,即需要拨桨机构进行拨桨操作使其全部桨叶转动至停机平台边界内部。经过拨桨测试,无人机的4只桨叶在部分或全部超出回收边界的状态下均能在拨桨机构的动作下成功将桨叶拨至回收边界内。测试后的状态如图11所示。
4 结论
本文针对无人机户外巡检作业中的放飞以及回收需求,设计了一种适用于依维柯品牌的商务车车载无人机自动机库,该自动机库的结构主要包含停机平台、升降机构、归中夹紧机构及拨桨机构。采用PLC作为核心控制器,设计了硬件电路和软件程序,基于触摸屏设计了现场操作及监控的人机交互界面,可以对自动机库进行手动调试及一键自动放飞和回收,同时也可进行参数设置、状态记录,以确保系统运行的可靠性与安全性。采用GPRS和云平台服务器作为远程传输介质,设计了现场/远程监控系统,实现无人机和机库的双向通信。对自动机库的归中夹紧机构动作与拨桨机构动作进行了测试,测试结果表明,无人机在4类典型的停放位置状态下,自动机库均能实现归中夹紧功能;在部分或全部桨叶超出回收边界的状态下,均能在拨桨机构的动作下成功将桨叶拨至回收边界内。该车载无人机自动机库已投入使用,目前运行良好,极大提高了无人机户外作业的效率。
猜你喜欢
火控雷达技术(2023年2期)2023-07-15
数学物理学报(2021年3期)2021-07-19
指挥控制与仿真(2021年3期)2021-06-15
航空维修与工程(2019年3期)2019-09-10
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
固体火箭技术(2018年6期)2019-01-18
西北大学学报(自然科学版)(2018年2期)2018-04-18
振动工程学报(2015年2期)2015-03-01
固体火箭技术(2014年3期)2014-03-15