车辆精准截停技术原理与应用
2023-12-08 02:49郝梓均欧阳新宇欧阳鸿武肖方智
现代交通与冶金材料 2023年6期
郝梓均, 欧阳新宇, 欧阳鸿武, 肖方智
(中南大学极端服役性能精准制造全国重点实验室,湖南 长沙,410083)
1 概 述
我国汽车产业和交通运输业正处于快速发展过程。据公安部统计,2022 年全国机动车保有量达4.17 亿辆,机动车驾驶人达5.02 亿人;新能源汽车保有量达1310 万辆,同比增长67.13%[1]。随着我国汽车市场高度发展,对公共安全带来了巨大隐患。2023 年广州天河“1·11”驾车撞人案,因肇事驾驶人故意驾驶燃油SUV 冲撞行人和道路设施,造成5 死13 伤,严重危害了公共安全。与燃油车相比,电池类新能源汽车在恶意冲撞事件中还存在自燃的风险,在剧烈或高速碰撞后电芯发生内部虚短路,持续产生热量融化电芯隔膜后造成直接短路,引起车辆自燃,且电池类车辆的火灾采用干粉和二氧化碳扑救无明显效果,只能使用大量持续水喷淋作为扑救的主要方式[2]。这些因素进一步增大了电动汽车恶意冲撞事件的社会危害性。
为了降低恶意危险驾驶车辆对公共安全的风险,执法部门通常会对威胁公共安全的涉事车辆实施 精 准 截 停 技 术(Precision Immobilization Technique, PIT)。在PIT 操作中,执法车辆通过猛打转向盘,撞击目标车辆的侧后部位,使其发生激烈的旋转进入失稳状态而被迫停车,从而高效地截停目标车辆[3](如图1 所示)。为了成功实施PIT,警员需要经过严格的训练、计划和精准的介入时机。警方不仅要确保能成功截停目标车辆,还要尽可能地减少对公共交通、自身甚至涉事车辆驾乘人员的安全风险,因此在实施PIT 前,获得全工况下精准截停技术操作指导性原则具有重要意义。

图1 精准截停技术实施过程Fig.1 Implementation process of PIT
PIT 实施后的车辆失稳问题本质上是车辆受外部干扰后的横向稳定性问题。Zhou 等[3]建立了撞击前、撞击过程中和撞击后阶段的车辆动力学模型,分析了影响PIT 执行的重要因素,其仿真结果为PIT实施提供了参考,但未考虑撞击发生后目标车辆驾驶人反方向打转向盘的影响,未分析PIT 成功实施的边界条件。随着非线性动力学与数值分析方法的发展,人们对车辆横向稳定性有了更加深刻的认识。刘飞等[4]基于相平面分析方法研究车辆行驶稳定性,建立了非线性单轨车辆仿真模型,并以β-β̇(质心侧偏角-质心侧偏角速度)相图作为判定稳定性的条件,为车辆稳定性控制算法提供了准确的介入依据。陈赟等[5]基于李雅普诺夫第一法对车辆的失稳机理进行了系统性的分析,讨论了车辆非线性系统在平衡点处的稳定性。Johnson 等[6]基于二自由度非线性车辆模型与李雅普诺夫第二法,使用标准方法和改进动能函数构建了两个李雅普诺夫函数,分析了车辆的直线行驶横向稳定性。Fabio 等[7]提出一种简单的人-车耦合数学模型,通过α1-α2(前轴侧偏角-后轴侧偏角)相图发现技术熟练的驾驶人可有效地扩大稳定域,使原本不稳定状态变得稳定,并通过分岔分析,探讨了驾驶人控制增益、反应时间和车速对车辆横向稳定性的影响,并提出驾驶人行为对车辆横向稳定性起到稳定或扰乱作用源于人-车耦合模型存在 亚 临 界Hopf 分 岔。Sobhan 等[8]将 李雅普诺夫指数应用于二自由度非线性车辆模型的稳定性分析,通过计算李雅普诺夫指数得到了车辆横向稳定区域的边界,并对模型的初值稳定性与结构参数稳定性进行了全面的研究,通过算例,提出将最大李雅普诺夫指数作为受扰动车辆模型回归稳定不动点收敛速度的指标。
为此,运用李雅普诺夫指数分析不同车速与路面条件下目标车辆横向稳定性的演化趋势,得到了全工况下精准截停技术操作的指导原则。由于所研究的PIT 行为与车辆变道、匝道汇入车辆、别车等工况类似,分析与结论也可应用于此类车辆事故研究,为车辆提升主动安全性能提供理论依据。
2 PIT 分析与模型构建
2.1 目标车辆失稳与警车稳定性力学分析
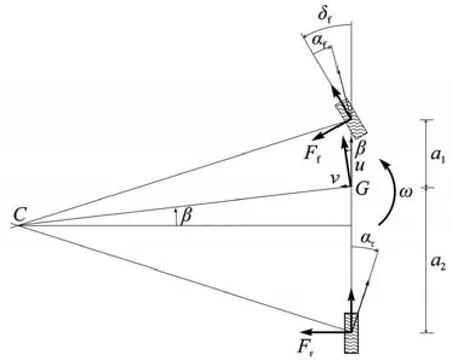
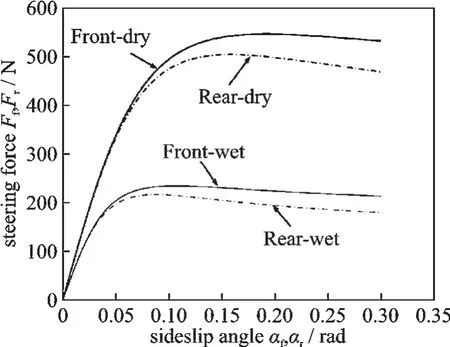
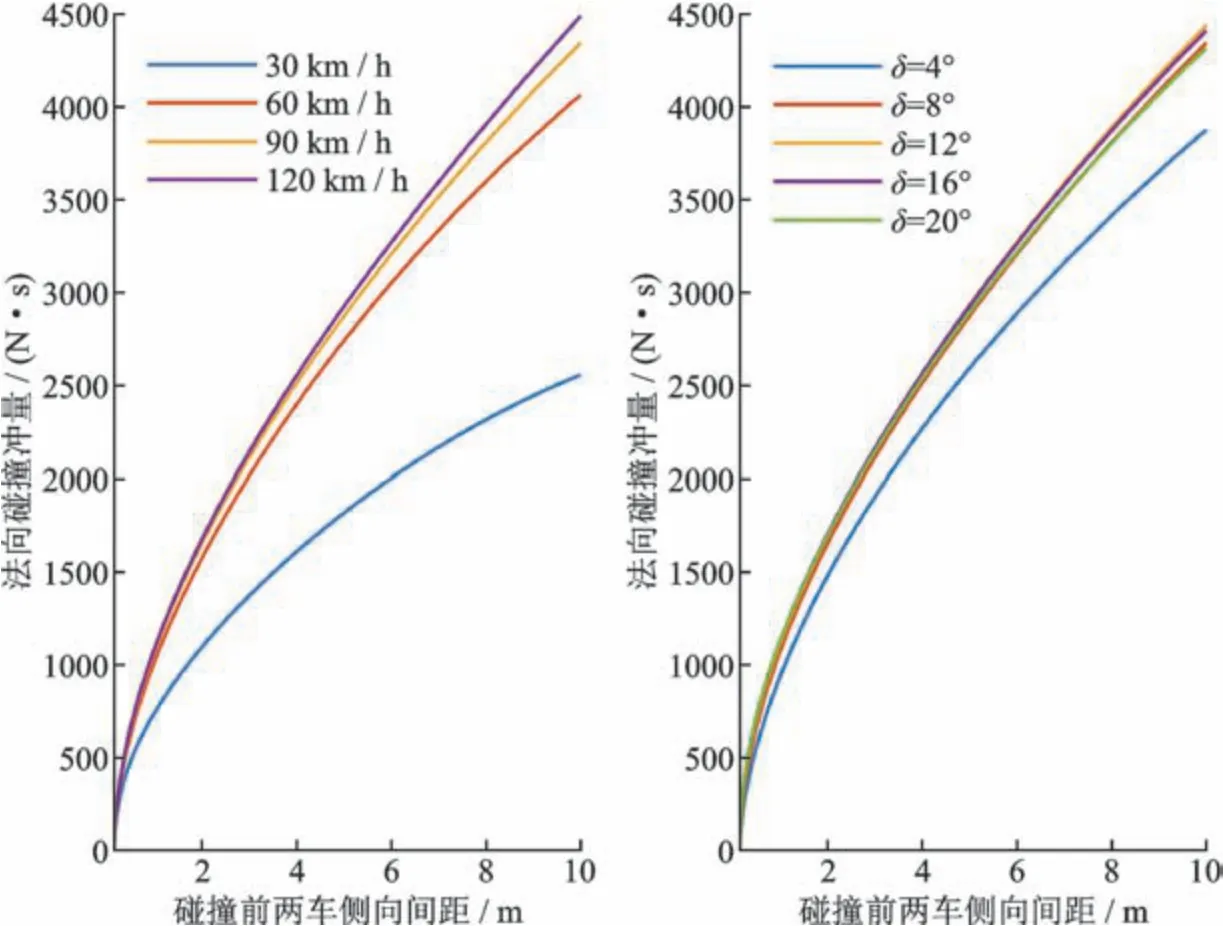
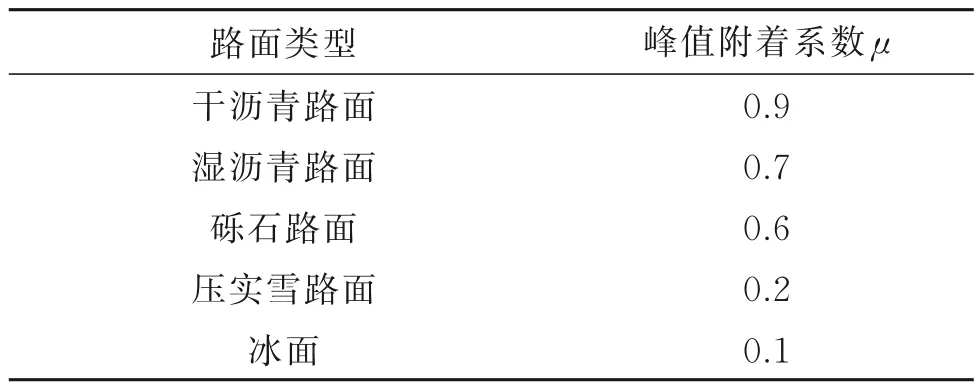
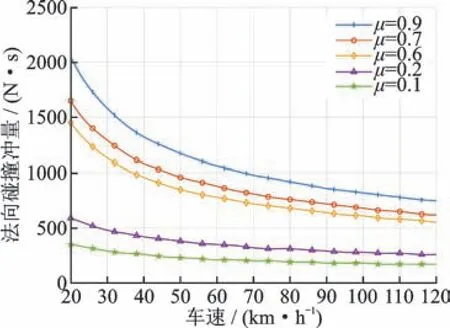
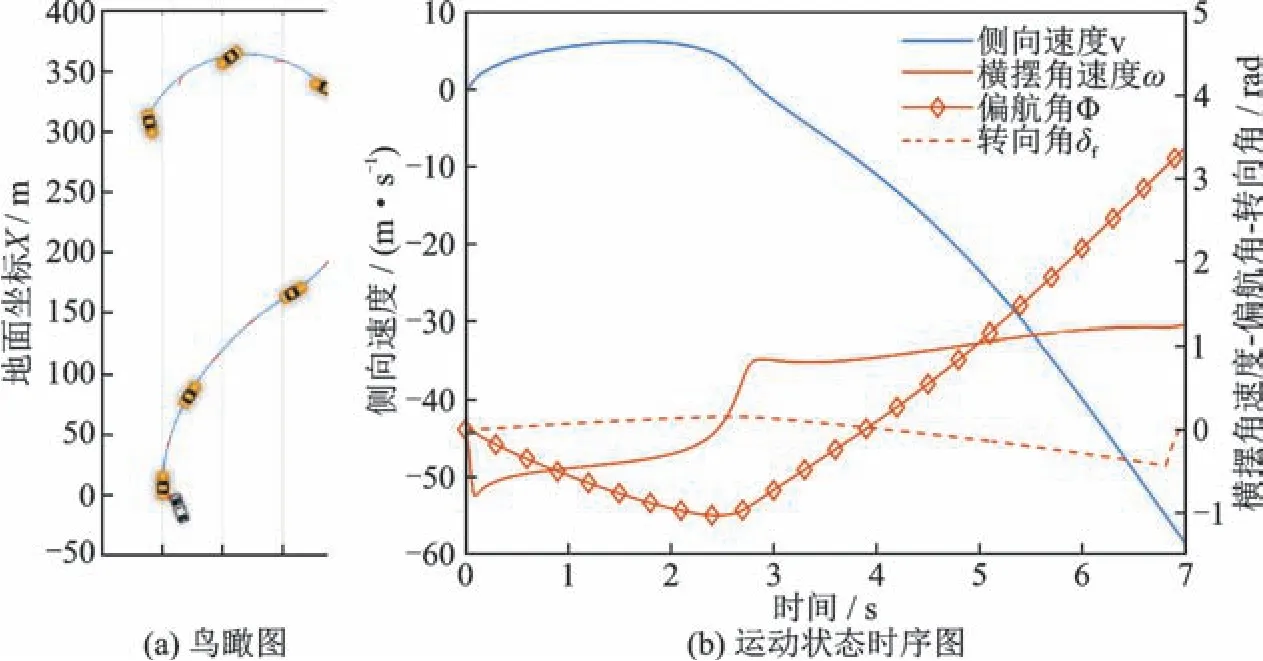
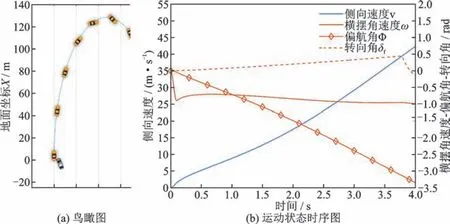
首先从受力情况分析PIT 实施后目标车辆失稳的机理。图2 (a)为目标车后保险杠受到撞击的情况。假设车辆的纵向速度与前轮转向角不变,汽车受到持续时间在0.1 s 的侧向撞击力作用后:车身产生正向侧向速度vy与极大的负向横摆角速度ω1;后轴发生了剧烈侧向滑动,后轮侧向力进入饱和区。此时,前、后轴均有正向的侧偏角并受到向右的地面侧向反作用力FY1,FY2,且FY1 图2 目标车辆失稳过程力学分析Fig.2 Mechanical analysis of the instability process of the target vehicle 图3 (a)为碰撞前警车的受力状态,汽车有正的横摆角速度ω与负的质心侧偏角(侧向速度vy向右),离心力向右,并与前、后轴的地面侧向反作用力平衡;图3 (b)中警车的前保险杠受到撞击力作用,横摆角速度ω在极短的时间内变为负值,并产生向左的离心力侧向分量Fj,车身侧向速度vy在撞击作用下骤增;在横摆角速度ω的作用下,前轴侧偏角β1增大,后轴侧偏角β2减小,车身回正力矩Ta=FY1a1-FY2a2>0 使横摆角 图3 警车稳定过程力学分析Fig.3 Mechanical analysis of the stability process of the police vehicle 速度ω略微减小(a1,a2分别为质心到前轴距离与质心到后轴距离)。如图3(c)所示,碰撞结束一段时间后,离心力的侧向分量Fj使向右的侧向速度vy不断减小,甚至变为较小的正值,前、后前轴产生方向相反的侧偏角,此时的车身回正力矩为Ta=FY1a1+FY2a2>0,极大地减少了横摆角速度,车身的横摆运动得到抑制,汽车逐渐恢复稳定。 假设车辆追逐发生在平直路面上,路面中心线定义为地面坐标系X轴,目标车辆车速u保持不变。 根据图4 所示二自由度单轨模型与车身坐标系下的力与力矩平衡有: 图4 二自由度单轨模型Fig.4 Single track model 式中m为 车辆质量;Jz为 横摆转动惯量;a1,a2分别为质心到前轴距离与质心到后轴距离;u为车辆纵向速度;v为车辆侧向速度;ω为横摆角速度;δf为前轮转向角;Ff,Fr分别为前、后轮侧偏力;αf,αr分别为前、后轮侧偏角。 根据魔术公式,轮胎侧偏力为[9]: 式中μf,Nf,Df,Bf分别为前轮的路面峰值附着系数、峰值因子、形状因 子与刚度因子;μr,Nr,Dr,Br分别为后轮的路面峰值附着系数、峰值因子、形状因子与刚度因子。 目标车辆驾驶人在发生撞击后试图反打转向盘修正车辆偏航角Φ,由于车辆追逐发生在平直道路,因此偏航角偏差e=0-Φ。考虑驾驶人反应时间τr与转向增益kp,可得: 驾驶人的偏航角修正行为存在延迟,由于人类改变转向角的频率不超过3 Hz[10],因此延迟可用其泰勒展开式的线性项来近似代替。 得到前轮转向角微分方程为: 联立式(1)~(8)得到人车耦合模型微分方程: 假设:车辆的纵向速度u不变;车辆的前轮转向角δf很小;不考虑驾驶人操纵行为,可得到二自由车辆动力学模型: 式中β为质心侧偏角。 图5 给出了典型路面条件下轮胎侧偏力与侧偏角之间的关系。可以发现轮胎力曲线存在增长区域与衰减区域,例如:干燥路面下,后轮轮胎力曲线在侧偏角0~0.14 rad 时,轮胎力位于增长区域其曲线斜率为正;侧偏角大于0.14 rad 后,轮胎力位于衰减区域其曲线斜率为负。 图5 魔术公式轮胎模型Fig.5 Magic Formula Tire Model 平衡点(β*,ω*)为F(β,ω)=0 的解,基于李雅普诺夫第一法判断系统在平衡点处的稳定性,其稳定性由对应的雅可比矩阵决定[11]: 式中C*f,C*r分别为前、后轮在平衡点处轮胎侧偏力关于侧偏角的一阶导数。如果平衡点为稳定结点,则雅可比矩阵J的迹与行列式分别满足: 对PIT 撞击后目标车辆与警车的横向稳定性进行分析。为简化分析,这里提出一个合理的理想化假设:轮胎侧偏力关于侧偏角的一阶导数在撞击发生时可瞬间改变,由线性区瞬间进入饱和区,即使在车辆运动状态还未变化时。 (a)目标车辆:假设目标车辆前轮转向角为0 并保持不变,此时(0,0)为平衡点。在极其短暂的撞击发生后,相当于在平衡点处施加一个扰动,前轮侧偏力仍保持在增长区域C*f>0,后轮侧偏力瞬间进入衰减区域C*r<0,此时Tr(J)<0,Det(J)<0,特征值为实数,且符号相反。此时平衡点为鞍点,车辆失稳。 (b)警车:假设警车的前轮转向角很小并保持不变,(β*,ω*)为平衡点,汽车做稳定的圆周运动。在极其短暂的撞击发生后,相当于在平衡点处施加一个扰动,前轮侧偏力瞬间进入衰减区域Cf*<0,后轮侧偏力保持在增长区域Cr*>0,由图5 可见轮胎侧偏力衰减区域轮胎力达到饱和,其斜率极小。因此|Cf*|≫|Cr*|。 由 于|Cf*| 极 小 且 小 于0,则 有(a1+a2)2Cf* Cr*>-mu2a2Cr*,又 因 为mu2a1Cf*<0,易 得Tr(J)<0,Det(J)>0。此时平衡点为稳定结点。 碰撞车辆模型是一种描述车辆碰撞作用阶段车辆动力学特性的数学模型,发生在车辆碰撞接触瞬间到脱离接触瞬间。这一期间极其短暂,通常在100 ms 以内。根据碰撞过程中的车辆物理特性与试验数据,做出以下假设与简化[12]: (1) 大量的车对车碰撞试验表明,在车体最大变形时刻车体相对于碰撞接触瞬间的横摆角位移约2°~5°,且碰撞作用时间极短,因此可忽略碰撞作用期间的车辆横向位移与横摆角位移; (2)在碰撞作用阶段,碰撞车辆所受的碰撞冲击力极大,其数量级远超过车辆的轮胎力、空气阻力等力,因此忽略碰撞冲击力以外的冲量; (3)在碰撞作用阶段,碰撞冲击力作用点、车辆侧倾中心与车辆质心三者的高度相同,忽略碰撞冲击力产生的侧倾力矩,简化为二维碰撞车辆模型; (4)碰撞只损坏相碰撞的局部部位,车辆的结构参数不变。 如图6 所示,目标车辆偏航角为0,以撞击点处的 公 法 线n与 公 切 线τ 建 立n-τ 平 面 坐 标 系,Pn与Pτ分别为撞击点的法向冲量与切向冲量,车1 为目标车辆,撞击点到质心的切向距离为d1,到质心的法向距离为B/2,其中B为车1 车身宽度;车2 为警车,其偏航角为Φ2,撞击点到质心的直线距离为d2,撞击点相对于车2 车辆坐标系的弧度为ξ。 图6 二自由度非对心碰撞车辆模型Fig.6 2DOF non-central collision vehicle model 根据动量与角动量定理,可得: 式中m1,m2分别为车1、车2 的车辆质量;J1,J2分别为车1、车2 的横摆转动惯量;v10τ,v10n,v20τ,v20n分别为车1、车2 撞击前在公切线τ与公法线n方向上的车速;v1τ,v1n,v2τ,v2n分别为车1、车2 撞击后在公切线τ与公法线n方向上的车速以上6 个方程,碰撞前两车的6 个运动状态量均为已知,碰撞过程中的2个冲量与碰撞后两车的6 个运动状态量为未知,这里引入两个附加条件: (1)撞击点处法向弹性恢复系数: 式中V10n,V20n为两车撞击前在撞击点处的法向速度;V1n,V2n为两车撞击后在撞击点处的法向速度。 其中: (2)撞击面库仑摩擦系数: 联立上述方程,写为矩阵形式: 其中: 在碰撞前各车辆的运动状态量给定后,可用数值迭代方法计算碰撞过程中的冲量与碰撞后的各车辆运动状态量,得到如图7 所示的结果。 图7 不同条件下法向碰撞冲量与碰撞前两车侧向间距关系图Fig.7 Relationship between normal collision impulse and lateral distance between two vehicles before collision under different conditions 由图7 左图可知,碰撞发生前警车前轮转向角为8°,表明碰撞效能与碰撞前的两车侧向间距以及两车纵向车速相关;碰撞前两车纵向车速一定时,随着两车侧向间距的增大,碰撞效能提升。这是由于较大的侧向间距可提供更长的时间用于增加警车的横摆角速度与偏航角,使警车撞击点处的法向速度更大,产生较大的角冲量。碰撞前两车侧向间距一定时,两车纵向车速从30 km/h 增加到60 km/h,碰撞效能增加显著。这是由于车速提升后,警车的横摆角速度大幅增加,提升纵向车速增加了警车在撞击点法向的速度分量(偏航角减小量很小),导致撞击点出的角冲量增大。但从90 km/h 增加到120 km/h 时碰撞效能增幅很小。这是由于随着车速提升,稳态横摆角速度增益(也称为转向灵敏度)减小,碰撞前的横摆角速度与偏航角难以进一步增大,同时警车的侧向速度较大(方向与碰撞方向相反),共同抑制了碰撞效能的增加。因此,增大碰撞前增大两车侧向间距与警车纵向车速可以有效增强碰撞效能,但纵向车速超过60 km/h后,提高车速对增强碰撞效能的作用十分微弱。从图7 右图可知两车的纵向车速均为90 km/h,表明碰撞效能还与碰撞前警车的前轮转向角相关。两车侧向间距一定时,警车前轮转向角从4°增加到8°时,碰撞效能略有增加。这是由于随着前轮转向角增加,碰撞前警车的横摆角速度与偏航角增大,增加了警车在撞击点法向的速度分量。前轮转向角从8°增加到20°时,碰撞效能几乎不变。这是由于前轮侧向轮胎力饱和,转向灵敏度下降,横摆角速度与偏航角难以进一步增大,抑制了碰撞效能的增加。因此,警车驾驶人在实施PIT 时,采用8°的前轮转向角就能拥有较好的碰撞效能。 综上所述,碰撞前两车的侧向间距、警车的纵向车速与前轮转向角三者是影响碰撞效能的三个重要因素,其中碰撞前的两车侧向间距是其中最显著的因素。因此,采取给定警车前轮转向角(δf=8°)并调节碰撞前两车侧向间距以获得所需法向碰撞冲量的方法,来规划与实施PIT。 在确定撞击冲量Pn后,联立式(9)和式(22)可得目标车辆PIT 行为动力学模型: 当t≤0.1 s 时: 当t>0.1 s 时: 车辆对碰时静止车辆产生的加速度如图8 所示[13],因此碰撞过程中的碰撞冲击力可用正弦函数拟合: 图8 受撞击车辆的加速度测量值Fig.8 Measurement of acceleration of the impacted vehicle 碰撞的接触时间为0.1 s,Fn在(0 s,0.1 s)时间段产生的冲量恰好为Pn。 在非线性系统中给定某个初始条件x0,考虑其附近的一个点x0+δ0,其中初始的分离δ0是非常小 的。令δn表 示 迭 代n次 后 的 分 离,如 果|δn|≈|δ0|enλ,那 么λ被称为 李雅普诺 夫指数[14]。李雅普诺夫指数可用于描述系统受到扰动后的初值与原初值的轨道随时间收敛或发散的平均指数速率。当最大李雅普诺夫指数小于0 时,系统的相轨道收敛到稳定结点;当李雅普诺夫指数大于0 时,系统是不稳定的或混沌的。虽然李雅普诺夫指数主要用于判断系统是否混沌,但也可用于非线性系统的稳定性分析[8]。 对于一个n维的非线性动力学系统,在给定的初始条件下,将其假设为一个各主轴长度为Pi(t)(i=1,2,…,n)的n维超椭球体,并观察超椭球体的长期演化规律。超椭球体在无限时间内主轴扩张或收缩的平均速率称为李雅普诺夫指数,第i维李雅普诺夫指数定义为: 虽然计算李雅普诺夫需要选定一条基准轨迹,但李雅普诺夫指数与所选轨迹无关,是非线性系统的全局属性[15]。该项属性为车辆稳定性研究带来了便利。 李雅普诺夫指数的符号可表示系统的稳定性,负值表征超椭球体趋于收缩。如果系统所有的李雅普诺夫指数均为负值,则系统向平衡点指数级收敛。对于3 维及以上的系统,正的李雅普诺夫指数表征系统是混沌的,不稳定的。一般情况下李雅普诺夫指数无法直接解析求解,因此通常采用数值计算系统模型或时间序列的方式求解李雅普诺夫指数。 用Wolf 等[16]总结的正交化GSR 法来数值计算李雅普诺夫指数,按表1 与表2 给定目标车辆、驾驶人与轮胎的参数。 表1 目标车辆与驾驶人的参数[17]Tab.1 Parameters of target vehicle and driver[17] 表2 轮胎模型参数[4]Tab.2 Parameters of tire model[4] (a) 已知路面附着条件μ(如表3 所示)与驾驶人反应时间τr=0.2 s,研究不同纵向车速u下法向碰撞冲量对目标车辆稳定性的影响。其中目标车辆的纵向车速在20~120 km/h 之间,每一步增加5 km/h;目标车辆侧后部受到的法向碰撞冲量在100~2500 (N·s)之间,每一步增加10 (N·s),GSR法的计算步长设置为0.1 s,总时间为100 s。 表3 常见路面峰值附着系数[18]Tab.3 Peak adhesion coefficient of common road surfaces[18] 图9 为在不同路面附着条件下,目标车辆纵向车速与法向碰撞冲量对其横向稳定性的影响。首先,路面附着系数越高,目标车辆的稳定区域越大,需要更大的碰撞冲量才可将其截停;同时稳定区域的最大李雅普诺夫指数也更小,意味着高附着路面的车辆能更快地恢复到稳定状态。其次,可以发现路面附着系数在0.6~0.9 时,车速对车辆稳定性的影响较为明显,而路面峰值附着系数在0.1~0.2 时,车速对稳定性的影响较弱。这是由于低附着路面所能提供的轮胎力很小,低速下横摆运动所产生的离心力足以使前、后轮进入饱和区,车辆极易失控。最后,在不同路面附着条件下,能最快向稳定结点收敛的车速不同,例如:路面峰值附着系数在0.9 时,车速为90 km/h 时车辆能最快的恢复到稳定状态;路面峰值附系数在0.1 时,车速为20 km/h 时车辆能最快的恢复到稳定状态。 图9 不同路面条件下,最大李雅普诺夫指数与法向碰撞冲量、车速的关系Fig.9 Relationship between the maximum Lyapunov exponent and normal collision impulse and vehicle speed under different road conditions 为了获得全工况下精准截停技术操作指导性原则,在x-y平面上绘制图9 中最大李雅普诺夫指数为0 的等高线,将所有结果重叠后得到图10。图10中曲线的上半部分为目标车辆的失稳区域,下半部分为稳定区域;曲线表示不同路面附着条件下,使目标车辆失稳所需最小法向碰撞冲量,即成功实施PIT 所需的侧向碰撞冲量。在获得了截停所需碰撞冲量后,根据图7 即可规划警车的撞击路径。 图10 不同路面条件下,车速与失稳条件的关系Fig.10 Relationship between vehicle speed and instability conditions under different road conditions (b) 已知目标车辆纵向车速u与附着条件μ,研究不同驾驶人反应延迟时间下法向碰撞冲量对目标车辆稳定性的影响。其中目标车辆驾驶人反应延迟时间在0.1~1 s 之间,每一步增加0.05 s;目标车辆侧后部受到的法向碰撞冲量在100~2000 (N·s)之间,每一步增加50 (N·s),GSR 法的计算步长设置为0.1 s,总时间为100 s。 图11 为不同路面附着条件下,目标车辆驾驶人反应延迟时间与法向碰撞冲量对其横向稳定性的影响。驾驶人反应延迟时间是评价驾驶人驾驶水平的指标之一。但图11 显示驾驶人的驾驶人水平对截停所需碰撞冲量的影响很小,因此在规划PIT 时无需考虑目标车辆驾驶人的驾驶水平。但目标车辆在稳定状态下驾驶人反应延迟时间对最大李雅普诺夫指数的大小有影响,即稳定收敛速度与驾驶人反应延迟时间有关。 图11 不同路面条件下,最大李雅普诺夫指数与法向碰撞冲量、驾驶人反应时间的关系Fig.11 The relationship between the maximum Lyapunov exponent and normal collision impulse and driver reaction time under different road conditions 根据第3 节的分析,可将图10 作为精准截停技术操作指导性原则。验证过程如下:当目标车辆行驶在干沥青路面(μ=0.9),纵向车速为80 km/h时,查图10可得PIT 使目标车辆失稳的法向碰撞冲量边界条件为920 (N·s)。为了避免数值插值带来的误差,分别选取910和930 (N·s)的法向碰撞冲量进行仿真实验。 取路面峰值附着系数μ=0.9,纵向车速为80 km/h,法向碰撞冲量为910 (N·s) ,GSR 法的计算步长设置为0.01 s,总时间为100 s。图12 在7.45 s后所有的李雅普诺夫指数均变为负值,系统向稳定结点指数级收敛。观察图13(a)可发现目标车产生了类似“双移线试验”的运动轨迹,可见驾驶人的方向修正操作使车辆由“失稳”变为可控。图13(b)中0~2 s 驾驶人通过反向打转向盘,使车辆的横摆角速度迅速减小,在第6 s 时车辆恢复到稳定状态。 图13 目标车辆运动状态演化Fig.13 Evolution of motion state of target vehicle 取路面附着系数μ=0.9,纵向车速为80 km/h,法向碰撞冲量为930 (N·s) ,GSR 法的计算步长设置为0.01 s,总时间为100 s。图14 中李雅普诺夫指数λ1为正值,表征系统是不稳定的。观察图15(a)可发现目标车产生了类似“问号”的运动轨迹,发生了严重的过多转向,驾驶人失去对车辆的控制。图15 (b)中0~2 s 驾驶人通过反向打转向盘,使车辆在第2.45 s横摆角速度降为0,但此时车辆侧向速度为4.5 m/s,后轮轮胎力工作在饱和区,车辆发生过多转向,在第3.3s前轮也进入饱和区,车辆处于失控状态。 图14 目标车辆失稳工况李雅普诺夫指数谱Fig.14 Lyapunov exponent spectrum of target vehicle under unstable conditions 图15 目标车辆失稳运动状态演化Fig.15 Evolution of unstable motion state of target vehicle 如果进一步将法向碰撞冲量增大到1020 (N·s),观察图16(a)可发现目标车产生了类似“鱼钩”的运动轨迹,车辆发生了严重的过多转向,驾驶人失去对车辆的控制。图16(b)中0~3.8 s 驾驶人通过反向打转向盘试图修正车辆偏航角,但第0.1 s 撞击结束后车辆的前、后轮均已进入饱和区,轮胎力产生的横摆力矩极小,车辆处于失控状态。 图16 目标车辆失稳运动状态演化Fig.16 Evolution of unstable motion state of target vehicle 基于二维人-车耦合动力学模型对精准截停技术原理进行分析;运用李雅普诺夫指数探讨目标车辆的失稳边界条件,其中,最大李雅普诺夫指数用于判断车辆的稳定性,以及描述轨线向稳定点收敛的速度。研究发现:在PIT 中,纵向车速与路面附着系数是影响目标车辆失稳边界条件的重要因素,而驾驶人反应延迟时间对其几乎没有影响(即截停所需的碰撞冲量与目标车辆驾驶人的驾驶水平无关),但驾驶人反应延迟时间与目标车辆稳定状态下的收敛速度有关。 对目标车辆失稳因素分析表明,不同条件下成功实施精准截停技术的边界侧向碰撞冲量有所不同,执法人员应根据具体条件规划和掌握作业时机。PIT 行为与车辆变道、匝道汇入车辆、别车等工况类似,分析结果与结论也可作为提升车辆主动安全性的理论依据。

2.2 人-车耦合动力学模型
2.3 目标车辆与警车横向稳定性分析
2.4 二维碰撞车辆模型


3 目标车辆稳定性分析
3.1 李雅普诺夫指数
3.2 目标车辆李雅普诺夫指数稳定性分析




4 PIT 目标车辆稳定性仿真分析
4.1 法向碰撞冲量910(N·s),目标车辆逃脱截停仿真

4.2 法向碰撞冲量930( N·s),目标车辆成功截停仿真

5 结 论
猜你喜欢
湖南工业大学学报(2023年4期)2023-06-09
当代水产(2022年3期)2022-04-26
佳木斯大学学报(自然科学版)(2022年1期)2022-01-14
自动化学报(2019年8期)2019-09-15
博客天下(2014年24期)2014-09-25
西安交通大学学报(2014年7期)2014-04-16
物理通报(2011年8期)2011-01-24
空间控制技术与应用(2010年5期)2010-12-23
海外文摘(2009年11期)2009-12-31
海外文摘(2009年10期)2009-12-23