基于无人机技术的电梯井道巡检与建模系统设计与优化
2023-12-14 15:12胡欣
价值工程 2023年34期
胡欣
(日立楼宇技术(广州)有限公司,广州 510000)
0 引言
电梯作为现代城市生活不可或缺的一部分,为人们提供了便捷的垂直交通方式。然而,电梯井道的安全性和可靠性对于使用者的生命和财产安全至关重要。因此,对电梯井道的巡检和维护显得尤为重要。传统的巡检方法通常依赖于人工勘测,存在着效率低下、成本高昂、安全风险大等问题,限制了其应用范围和效果。通过结合激光雷达、摄像头和其他传感器,无人机可以实时采集井道内的数据,并借助先进的算法生成高精度的三维模型。这一模型不仅可用于巡检任务,还可作为未来维护和改进的基础。本研究的目标是设计和优化一种基于无人机技术的电梯井道巡检与建模系统,以克服传统方法的限制,提高效率、降低成本,并增强安全性[1]。下文将详细介绍系统的设计和优化过程,以及实验结果的分析,展示了这一系统在电梯领域的潜在应用前景。
1 电梯井道巡检系统设计
以某小区居民2 号楼为例,楼层共计22 层,地下2层,共24 层。电梯井道巡检系统的设计需要考虑无人机平台、传感器配置、飞行控制系统、数据传输与存储以及详细的巡检流程,如图1 所示。无人机起落平台在2 号楼顶。

图1 基于无人机技术的电梯井道巡检设计
1.1 无人机平台设计
图2 为无人机平台的设计,其中包括了各种关键组件和传感器,如激光雷达、摄像头、温度湿度传感器等。这些传感器将为无人机提供必要的数据,用于飞行控制系统的操作和路径规划,同时还能实时传输和存储这些数据,以供后续分析使用。因此,这些传感器的配置是确保整个系统高效运行的关键因素。

图2 无人机平台设计图
1.1.1 传感器配置 在居民小区2 号楼无人机平台的设计中,选择和配置合适的传感器至关重要,以确保系统可以获取准确而全面的井道数据。激光雷达传感器:在无人机上安装高精度激光雷达传感器,用于生成2 号楼井道的三维地图和距离数据。这有助于检测井道内的障碍物和设备磨损情况[2]。摄像头和机器视觉系统:配备高分辨率摄像头和机器视觉系统,以捕捉图像和视频数据,用于视觉检查和分析。这有助于检测设备的状态和损坏。温度和湿度传感器:添加温度和湿度传感器,以监测井道内的环境条件,提供温度和湿度等数据,以便预防潮湿或高温环境对电梯设备的影响[3]。
1.1.2 飞行控制系统 2 号楼电梯井路径规划:开发路径规划算法,以确定无人机的飞行路径,涵盖整个井道,楼层22 层,地下2 层,共24 层。考虑井道的几何特性和障碍物位置,以确保安全飞行。遥感避障:配备遥感避障技术,以自动检测并规避井道内的障碍物,确保飞行安全。
1.1.3 数据传输和存储 设计数据传输和存储系统,以确保采集到的数据能够及时传输和安全存储:实时数据传输:配备实时数据传输系统,将采集到的数据传输至地面控制终端,以便实时监测。数据存储:需要具备数据存储设备,将采集的数据进行存储,以便后续分析和建模。
1.2 巡检流程设计
1.2.1 站点选择和悬停策略 制定站点选择策略,确定无人机在井道内的巡检站点,并设计悬停策略以确保数据采集的全面性:每个楼层为一个站点,共24 个站点。站点位置:基于井道的几何特性,确定巡检站点的位置,以确保覆盖井道的所有关键区域。2 号楼电梯进的站点设置在每层的中点。悬停策略:确定无人机在2 号楼电梯井每个站点的悬停时间为10-20 秒,以充分采集数据并执行所需任务[4]。
1.2.2 数据采集流程 设计详细的数据采集流程,包括激光雷达扫描、图像采集、温湿度记录等,以确保获取完整的巡检数据。
1.2.3 巡检结束条件 站点巡检完毕:所有巡检站点都完成数据采集。安全条件满足:机体当前与井道顶部的距离落入安全距离范围[5]。接收到巡检结束指令:从地面控制终端接收到巡检结束指令。电梯井道巡检系统的设计需要综合考虑无人机平台、传感器配置、飞行控制系统、数据传输与存储以及详细的巡检流程,如图3 所示,以确保安全高效的巡检和数据采集[6]。

图3 巡检流程
2 实验环境的搭建和实验数据采集
共设立24 个悬停点,数据采集在24 个悬停点进行采集。
2.1 数据采集起始点 无人机机体坐标系Bcoor 建立完成。世界坐标系Gcoor 初始化。激光雷达中心在世界坐标系的坐标:O1(0,0,3.5 米)。无人机机体坐标系在世界坐标系的坐标:O 无(0,0,3.0 米)。
2.2 第一站数据采集 2 号楼电梯井地下第二层为第一站点,高度尺寸:Z1=3.2 米。激光雷达数据采集点(X1i,Y1i):(2.0 米,1.5 米),(2.5 米,2.0 米),(3.0 米,2.5 米),...
光电位置传感器记录的偏差值:(0,0)。
2.3 飞行与悬停第二站数据采集 第二站悬停点为2号电梯井地下第一层。飞行至高度Z2 估计,Z2 估计=6.2 米。
激光雷达数据采集点(X2i,Y2i):(2.1 米,1.6 米),(2.6米,2.1 米),(3.1 米,2.6 米),...
光电位置传感器记录的偏差值:(0.1 米,0.1 米)。
IMU 输出的翻滚角Φ2=5 度,俯仰角θ2=3 度,偏航角Ψ2=10 度。激光雷达到底坑的高度H2=6.0 米。
2.4 重复数据采集 最后点为2 号楼电梯井第22 层,依次飞行至高度Zn 估计,Zn 估计可以是任何站点的高度估计值,例如Z3 估计=8.5 米。激光雷达数据采集点(Xni,Yni)根据站点位置不同而变化。光电位置传感器记录的偏差值也会根据站点位置不同而变化。IMU 输出的姿态角度信息也会随着站点的改变而变化。下面是一些采集到的数据示例,以站点2 为例:站点2 的激光雷达数据采集点:(2.1 米,1.6 米),(2.6 米,2.1 米),(3.1 米,2.6 米),...
站点2 的光电位置传感器记录的偏差值:(0.1 米,0.1米)。IMU 输出的姿态角度信息:Φ2=5 度,θ2=3 度,Ψ2=10度。激光雷达到底坑的高度H2=6.0 米。这些数据将用于构建井道的三维网格模型和建立井道的三维模型,从而提供了井道的详细信息,包括其尺寸、形状以及任何不规则结构的位置。这些数据将与设计模型进行比较,以确定是否需要进行土建返工或对电梯井道的设计进行修正[7]。
3 基于无人机技术的电梯井道巡检与建模系统的优化方案
3.1 数据预处理
3.1.1 坐标系校准 根据小区2 号楼楼梯井的情况,使用差分全球定位系统(DGPS)或基站定位技术,提供更准确的无人机位置信息,确保机体坐标系Bcoor 和世界坐标系Gcoor 的校准更加准确。DGPS 或基站定位系统输出的无人机位置坐标数据。
3.1.2 高度估计优化 按照小区2 号楼的地理位置和小区情况,整合气压计、激光高度计以及地形地图数据,进行高度估计,进一步提高高度估计的准确性[8]。气压计、激光高度计输出的高度数据,地形地图数据。
3.1.3 传感器误差修正 使用传感器融合算法,结合激光雷达数据和光电位置传感器数据,进行误差修正,校正位置信息。激光雷达采集的距离数据,光电位置传感器记录的位置偏差[9]。
3.2 电梯井道三维建模方法
3.2.1 多传感器融合 使用扩展卡尔曼滤波(EKF)或粒子滤波(PF)算法,将激光雷达数据、光电位置传感器数据和IMU 输出的姿态角度信息融合,提高建模精度。激光雷达采集的三维坐标点云,光电位置传感器记录的位置信息,IMU 输出的姿态角度数据。
3.2.2 自动特征提取 使用计算机视觉算法,如结构光投影或深度学习神经网络,进行井道内不规则结构和障碍物的自动特征提取。激光雷达采集的点云数据、图像数据。
3.2.3 实时建模 开发实时三维建模软件,将无人机采集的数据实时转化为建模结果,提供实时可视化。无人机采集的数据,实时建模软件生成的建模结果。
3.3 三维建模精度优化
3.3.1 数据点密度增强 减小激光雷达扫描间隔,增加扫描层数,以提高数据点的密度。激光雷达采集的三维坐标点云。
3.3.2 建模算法改进 对三维建模算法进行改进,以提高建模精度。
特征提取算法:改进了特征提取算法,以提高井道内各种特征(如管道、电缆等)的准确识别。新的特征提取算法可以表示为以下数学公式:
其中:F(x,y)表示特征提取函数,用于检测井道内的特征。x 和y 是特征的坐标。x0和y0是特征的中心坐标。σ是特征的标准差,控制特征的分布范围。
壁厚处理算法:改进了壁厚处理算法,以更准确地考虑井道壁的厚度对建模的影响。新的壁厚处理算法可以表示为以下数学公式:
其中:T(x,y,z)表示壁厚处理函数,用于校正井道壁的厚度。x、y 和z 是井道内的坐标,其中z 表示垂直方向。T0是壁厚处理前的原始厚度。k 是衰减系数,用于考虑井道壁的吸收特性。
这些优化方案将有助于提高基于无人机技术的电梯井道巡检与建模系统的效率、精度和可靠性,为电梯维护提供更全面和准确的数据,从而提高电梯系统的可靠性和安全性水平[10]。
3.3.3 故障检出过程 根据上面的模拟,电梯巡检机器人的故障监测,主要是为在发生故障前及时发现不对等的信息,将其故障点的位置进行提前定位,在同样的监测时间内对每组机器人进行检查,通过对故障出现较多次数的第四个周期进行测试,分别验证不同检测方法对故障次数的检出效果,以第200 组数据产生的故障信息为例,具体如图4 所示。低层为地下2 层+地上6 层,中层7-13 层,高层14-22 层。

图4 本文方法电梯巡检机器人的检测结果
为进一步验证本文方法对故障数据的定位效果,以发生故障的位置进行数据检测,在发生故障时的传感器温度达到40℃时,分别对传统方法与本文方法进行比较,二种检测方法能够提取的故障数据进行多轮验证,具体结果如表1 所示。
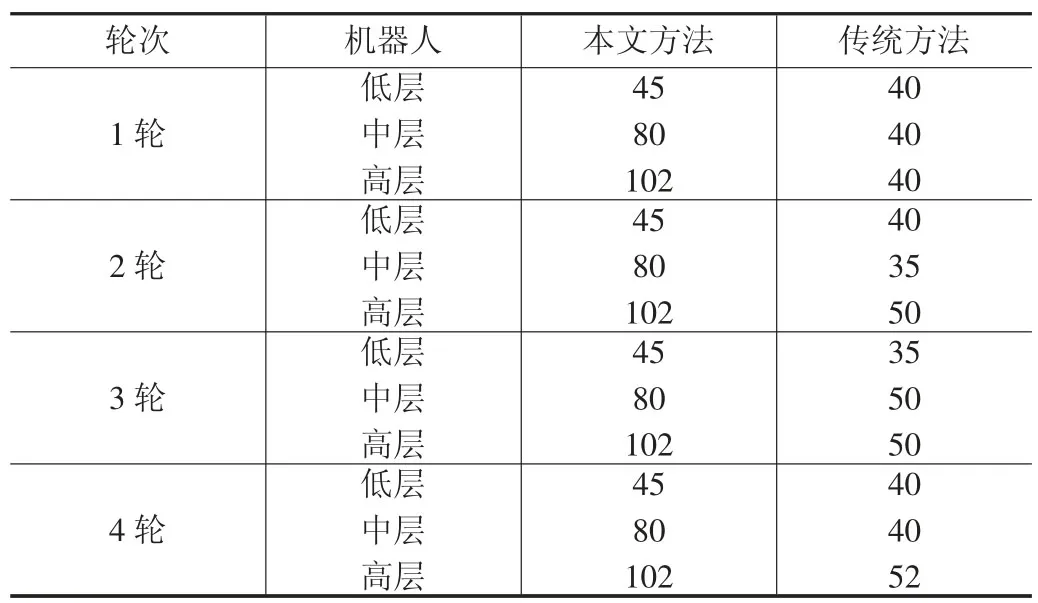
表1 不同方法下故障数据的检测结果
根据表1 中内容所示,对不同楼层内的电梯巡检机器人故障数据检测中,本文方法产生的数据结果与样本数据基本一致,能够对故障位置进行有效定位;而传统方法的检测数据存在丢失现象,在无法对所有的故障数据完成检出的前提下,不能对产生故障的位置进行定位,会造成巡检机器人发生故障。
4 结束语
本研究致力于推动电梯井道巡检与建模领域的创新,利用无人机技术实现了一种高效、安全且经济的解决方案。通过系统的设计与优化,成功地将无人机与传感器技术相结合,使其成为电梯井道巡检的强大工具。实验结果表明,无人机巡检系统在巡检效率和建模精度方面均取得了显著的进展,为电梯井道的维护和管理提供了全新的可能性。未来,将继续致力于改进系统性能,扩大应用范围,并进一步提高安全性。电梯井道巡检与建模系统将继续为城市生活的便捷和安全作出贡献,推动电梯技术领域的不断发展和创新。
猜你喜欢
北京测绘(2022年5期)2022-11-22
中国特种设备安全(2021年7期)2022-01-19
汽车观察(2021年8期)2021-09-01
中国特种设备安全(2019年11期)2020-01-16
中国特种设备安全(2019年10期)2020-01-04
电子制作(2019年14期)2019-08-20
中国交通信息化(2019年1期)2019-03-26
国际呼吸杂志(2019年1期)2019-01-28
电子制作(2018年16期)2018-09-26
中国自行车(2017年1期)2017-04-16