
高垄畦沟小型农业作业机器人设计与试验
2023-12-14 11:50岑华
安徽农业科学 2023年23期
关键词:设计
摘要 针对高垄畦沟小型农业作业机器人的设计内容进行研究,首先阐述了整体结构设计,其次阐述了关键部件设计,再次阐述了多体动力学性能分析,最后提出了行驶稳定性试验。在此期间设计了一种较小的轮式机器人。为了论证该机器人的可用性和实用性,使用RecurDyn仿真软件对机器人可能应用到的田垄结构动力学和运动学进行仿真建模。仿真结果表明,此次设计的机器人模型可以达到转向半径超过0.8 m的实际需求,并按照田垄结构来进行直线上的工作,在此期间移动平台的侧倾角不会超过3°,且该移动平台所支持的作业速度上限为1.0 m/s。田间试验结果表明,当该移动植保机作业速度为1.0 m/s时,最大侧倾角为14.00°。
关键词 高垄畦沟;小型移动平台;仿真试验;设计
中图分类号 S 22 文献标识码 A 文章编号 0517-6611(2023)23-0198-05
doi:10.3969/j.issn.0517-6611.2023.23.045
Design and Experiment of Small Agricultural Robot for High Ridge Furrow
CEN Hua
(Guangxi Modern Polytechnic College, Hechi, Guangxi 547000)
Abstract In this paper, the design content of small agricultural robot for high ridge furrow was studied. Firstly, the overall structure design was described. Secondly, the design of key components was elaborated. Thirdly, the multi-body dynamic performance analysis was elaborated. Finally, the driving stability experiment was proposed. During this period, we designed a small-size wheeled robot. In order to demonstrate the usability and practicability of this robot, this paper mainly used RecurDyn simulation software to simulate the dynamics and kinematics of the field ridge structure that the robot might applied. Through the simulation results, it could be judged that the robot model in this design could reach the actual demand that the turning radius exceeded 0.8 m, and it could operate on the straight line according to the field ridge structure, and the roll angle of the mobile platform would not exceed than 3 ° during this period, the upper limit of operation speed supported by the mobile platform was 1.0 m/s. The field test results showed that the maximum roll angle of the mobile plant protection machine was 14.00° when the working speed was 1.0 m/s.
Key words High ridge furrow;Small mobile platform;Simulation experiment;Design
基金项目 2021年广西高校中青年教师科研基础能力提升项目(2021KY1420);2022年广西高校中青年教师科研基础能力提升项目(2022KY1438)。
作者简介 岑华(1977—),男,广西河池人,教授,从事机械CAD/CAM技术、智能控制与机器人技术研究。
收稿日期 2022-12-07
随着时代的发展与进步,垄作法也需要针对水土保持特性来进行适当改变。鉴于高垄畦沟独特的特点,需要针对田间管理机械进行适当改良。某地是我国著名的农业种植基地,所种植的农产品种类较多。考虑到农业作业的困难性,我国学术界提出了小型农业作业机器人的设计,以期能通过轮式机器人来改善农作物的成活率,避免虫害对农田造成过多的破坏。成艳真[1]构建了一种导苗管式机器人,试验表明这种机器人操作较为便捷,它能提升农作物的移栽工作效率。全武生等[2]设计了500 kV四分裂输电线路防震锤检修机器人,这种机器人具有较强的自动作业能力。于庚等[3]提出了深海作业型机器人总体设计,并进行了性能分析。鲍明松等[4]设计了一种复合式的农业耕耘培土机,但是针对田间管理方面的设计成果仍然存在部分缺陷。
在植保工作中使用的移动平台是目前我國学术界和研究专家急于突破的领域方向,传统的植保设备包含无人机植保和高地植保设备[5],因为农作物种植通常是以山丘丘陵为主的田垄,因此高地植保设备难以投入到田间作业中,难以满足农产品后期的植保工作需求。目前,我国在农业作业期间仍然采用以人工式打药机为主的植保工作体系,但是因为农作物的种类多样且数量较大,因此需要投入较多的劳动力,并且在人力工作期间也容易对部分农作物造成损伤。
为了有效解决此类问题,笔者提出了一种以三轮结构为主体架构的移动平台。该平台具有较强的田头转向功能,因其自身具备稳定的临界条件,这些条件能够帮助移动平台计算并分析侧倾角的上限,若车速发生变化则移动平台也会随之开展动力分析和运动分析,确保移动平台能够在田垄作业期间正常进行工作。为了确保该平台的实用性和稳定性,笔者通过相关的试验方案来论证该平台设计成果是否可靠。
1 整体结构设计
1.1 整体结构
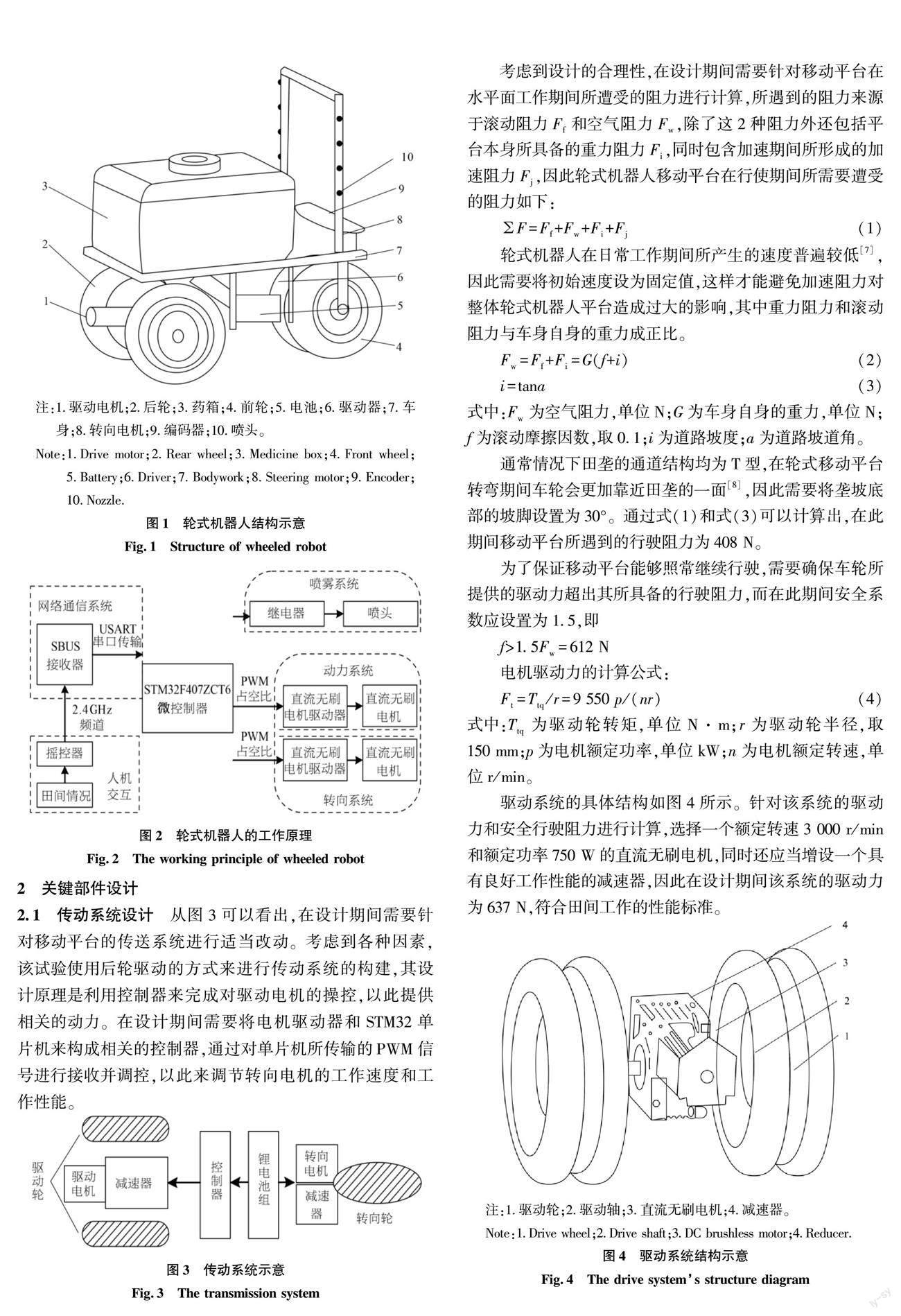
此次设计中机器人移动平台的关键性参数如下:型号轮式,质量60 kg,长×宽×高1.0 m×0.4 m×0.9 m,平均作业速度0.3 m/s,轴距0.6 m,后轮间距0.2 m,质心高度0.21 m。
移动平台包含传动系统、喷药系统、转向系统和车身构成,具体如图1所示。其中,传统系统由驱动减速器和驱动电机构成,车身包含龙门架和车架等,而转向系统包含转向减速器、前轮转角传感器等[6]。
1.2 工作原理
在实际工作期间,工作人员会利用网络通信系统对轮式机器人进行有效控制,而构成网络通信系统的核心在于SBUS接收器。这种接收器能够通过串口传输与微控制器之间形成有效互动,而其中的遥控器和工作人员则构成了人机交互,这样才能够支持工作人员随时针对田间情况进行操作,通过2.4 GHz频道和串口传输来完成对整个喷雾系统和动力系统的控制,具体工作原理如图2所示。其中,动力系统和转向系统在实际工作期间主要通过直流电流和驱动器来进行工作,最终通过遥控系统与喷药系统、动力系统和转向系统的连接来完成对轮式机器人的控制。
2 关键部件设计
2.1 传动系统设计
从图3可以看出,在设计期间需要针对移动平台的传送系统进行适当改动。考虑到各种因素,该试验使用后轮驱动的方式来进行传动系统的构建,其设计原理是利用控制器来完成对驱动电机的操控,以此提供相关的动力。在设计期间需要将电机驱动器和STM32单片机来构成相关的控制器,通过对单片机所传输的PWM信号进行接收并调控,以此来调节转向电机的工作速度和工作性能。
考虑到设计的合理性,在设计期间需要针对移动平台在水平面工作期间所遭受的阻力进行计算,所遇到的阻力来源于滚动阻力Ff和空气阻力Fw,除了这2种阻力外还包括平台本身所具备的重力阻力Fi,同时包含加速期间所形成的加速阻力Fj,因此轮式机器人移动平台在行使期间所需要遭受的阻力如下:
F=Ff+Fw+Fi+Fj(1)
轮式机器人在日常工作期间所产生的速度普遍较低[7],因此需要将初始速度设为固定值,这样才能避免加速阻力对整体轮式机器人平台造成过大的影响,其中重力阻力和滚动阻力与车身自身的重力成正比。
Fw=Ff+Fi=G(f+i)(2)
i=tana(3)
式中:Fw为空气阻力,单位N;
G为车身自身的重力,单位N;
f为滚动摩擦因数,取0.1;
i为道路坡度;
a为道路坡道角。
通常情况下田垄的通道结构均为T型,在轮式移动平台转弯期间车轮会更加靠近田垄的一面[8],因此需要将垄坡底部的坡脚设置为30°。通过式(1)和式(3)可以計算出,在此期间移动平台所遇到的行驶阻力为408 N。
为了保证移动平台能够照常继续行驶,需要确保车轮所提供的驱动力超出其所具备的行驶阻力,而在此期间安全系数应设置为1.5,即
f>1.5Fw=612 N
电机驱动力的计算公式:
Ft=Ttq/r=9 550 p/(nr)(4)
式中:Ttq为驱动轮转矩,单位N·m;
r为驱动轮半径,取150 mm;
p为电机额定功率,单位kW;
n为电机额定转速,单位r/min。
驱动系统的具体结构如图4所示。针对该系统的驱动力和安全行驶阻力进行计算,选择一个额定转速3 000 r/min和额定功率750 W的直流无刷电机,同时还应当增设一个具有良好工作性能的减速器,因此在设计期间该系统的驱动力为637 N,符合田间工作的性能标准。
2.2 转向系统设计
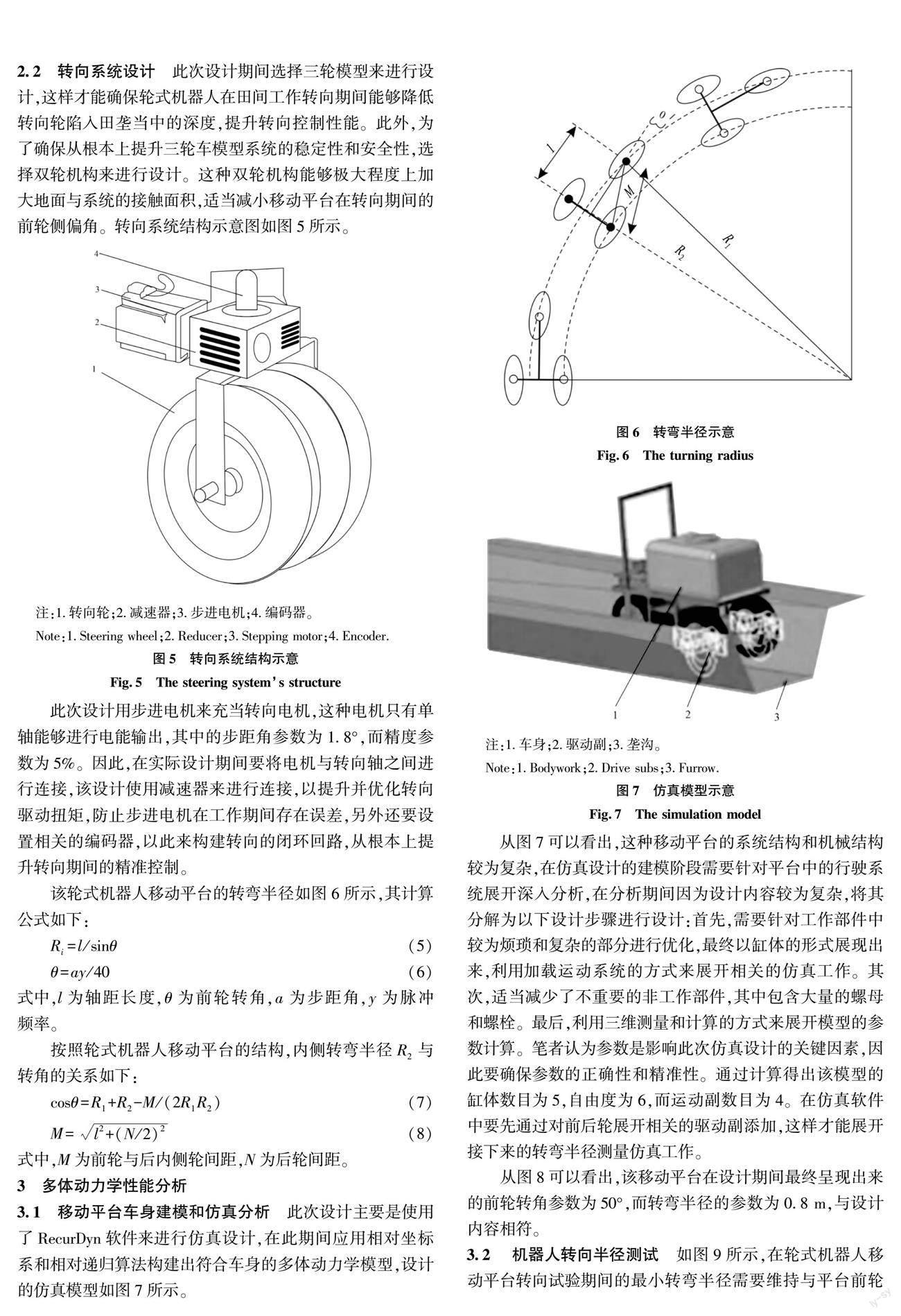
此次设计期间选择三轮模型来进行设计,这样才能确保轮式机器人在田间工作转向期间能够降低转向轮陷入田垄当中的深度,提升转向控制性能。此外,为了确保从根本上提升三轮车模型系统的稳定性和安全性,选择双轮机构来进行设计。这种双轮机构能够极大程度上加大地面与系统的接触面积,适当减小移动平台在转向期间的前轮侧偏角。转向系统结构示意图如图5所示。
此次设计用步进电机来充当转向电机,这种电机只有单轴能够进行电能输出,其中的步距角参数为1.8°,而精度参数为5%。因此,在实际设计期间要将电机与转向轴之间进行连接,该设计使用减速器来进行连接,以提升并优化转向驱动扭矩,防止步进电机在工作期间存在误差,另外还要设置相关的编码器,以此来构建转向的闭环回路,从根本上提升转向期间的精准控制。
该轮式机器人移动平台的转弯半径如图6所示,其计算公式如下:
Ri=l/sinθ(5)
θ=ay/40(6)
式中,l为轴距长度,θ为前轮转角,a为步距角,y为脉冲频率。
按照轮式机器人移动平台的结构,内侧转弯半径R2与转角的关系如下:
cosθ=R1+R2-M/(2R1R2)(7)
M=l2+(N/2)2(8)
式中,M为前轮与后内侧轮间距,N为后轮间距。
3 多体动力学性能分析
3.1 移动平台车身建模和仿真分析
此次设计主要是使用了RecurDyn软件来进行仿真设计,在此期间应用相对坐标系和相对递归算法构建出符合车身的多体动力学模型,设计的仿真模型如图7所示。
从图7可以看出,这种移动平台的系统结构和机械结构较为复杂,在仿真设计的建模阶段需要针对平台中的行驶系统展开深入分析,在分析期间因为设计内容较为复杂,将其分解为以下设计步骤进行设计:
首先,需要针对工作部件中较为烦琐和复杂的部分进行优化,最终以缸体的形式展现出来,利用加载运动系统的方式来展开相关的仿真工作。
其次,适当减少了不重要的非工作部件,其中包含大量的螺母和螺栓。
最后,利用三维测量和计算的方式来展开模型的参数计算。笔者认为参数是影响此次仿真设计的关键因素,因此要确保参数的正确性和精准性。通过计算得出该模型的缸体数目为5,自由度为6,而运动副数目为4。在仿真软件中要先通过对前后轮展开相关的驱动副添加,这样才能展开接下来的转弯半径测量仿真工作。
从图8可以看出,该移动平台在设计期间最终呈现出来的前轮转角参数为50°,而转弯半径的参数为0.8 m,与设计内容相符。
3.2 机器人转向半径测试
如图9所示,在轮式机器人移动平台转向试验期间的最小转弯半径需要维持与平台前轮转角之间的同向性,在此情况下进行一圈低速自转能够获得转向内侧车轮与外侧车轮之间所生成的内外侧轨迹,在这种情况下需要针对这种内外侧轨迹进行测量[9],通过测量结果能够得出移动平台在维持前轮转角为50°时内轮转弯半径为0.78 m,这样才能符合相关的转向半径标准。
3.3 移动稳定性临界条件分析
移动平台侧向倾斜角是评估移动平台安全稳定性的关键指标,倾斜角的增加能够提升移动平台的侧翻概率,车身自身出现侧翻的临界条件是要确保重心低于地轮,如图10所示。
因为移动平台需要采取相关的农业作业,在作业工作阶段平台若出现抖动的情况会导致作业质量严重下降或上升,因此在此次仿真分析期间需要针对轮式机器人在不同速度条件下所产生的侧倾角方差来充当相对标准的移动平台指标。该指标能够评估并代表该平台所具备的平稳性指标,需要针对平稳性相对较高的移动速度范围进行适当定位。
3.4 垄间行走仿真分析
在进行田间工作期间轮式机器人的平稳性与田间平稳性和车辆行驶速度之间存在着必然的关联性,因此需要针对不同速度条件下的行驶速度和稳定性进行分别记录[10]。此次仿真分析期间设置了0.8、1.0、1.3 m/s 3种速度(图11),要确保轮式机器人在垄间行驶期间的侧倾角上限为±2°左右,这样才能确保车身所呈现的振动趋势与起伏状态相同,因为垄沟底部的平稳性相对较高,因此在侧倾角和振幅上限都会随着车速波动而改变。此次仿真分析在采集期间需要用3种不同的田垄参数来进行仿真,对轮式机器人垄间行驶速度进行仿真分析,测试出其中的侧倾角变化和移动稳定性变化,如图12所示。当轮式机器人的速度较高时,侧倾角和其方差也会显著增加,而行驶的平稳性则会随之降低。
4 行驶稳定性试验
4.1 试验方法 在试验期间因为农田作业后期在实验基地展开,因此主要通过直线行驶和田间试验(图13)2种试验方法来开展试验。通过定速行驶试验方法开展测试,利用电子陀螺仪对不同速度条件下车身侧倾角的参数来进行测量,通过最终得出的测量数据来分辨并判断出轮式机器人在垄间行驶速度上限,针对机器人在进行田间转向期间所存在的缺陷测量车身侧倾角上限并及时修正。
4.2 田间试验
4.2.1 田间匀速行驶试验。
轮式机器人在匀速行驶期间所展开的试验方法是遥控式测试法,这种方法主要是通过电子陀螺仪针对轮式机器人在不同速度条件下行驶所呈现出的侧倾角,具体如图14所示。
如图14所示,在试验期间侧倾角所呈现出来的波动相对较小,当速度参数为0.8 m/s时,侧倾角上限为10.30°(图14a);当速度参数为1.0 m/s时,侧倾角上限为11.70°(图14b);当速度参数为1.3 m/s,侧倾角上限达到14.00°(图14c)。在此期间要确保试验结果与仿真结果存在同向性,因此在实际仿真期间轮式机器人的最佳作业速度为1.0 m/s左右。
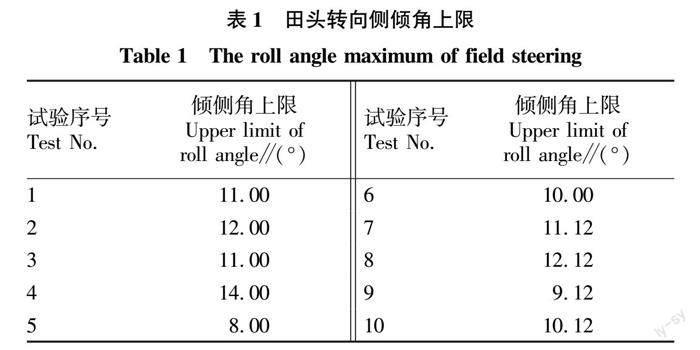
4.2.2 最大侧倾角试验。
在进行侧倾角上限试验期间将移动作业速度上限设置为1.0 m/s,通过若干次试验结果后将田间转向侧倾角上限测试数据如表1所示。
通过相关试验测量出轮式机器人在进行田间转向期间车身的侧倾角上限为14.00°,并且在实际试验期间车身并没有发生侧翻的现象。综上可知,此次设计较为成功,能够在田间工作期间完成常规的农业作业,并且难以发生侧翻的现象,能够满足大多数农户对轮式机器人的使用需求和移动平台对轮式机器人的运动需求。通过测试能够得出轮式机器人在水平面工作期间可以达到的最小转弯半径参数为0.8 m,当车身速度参数为1.0 m/s、侧倾角上限参数为14.00°时,轮式机器人在实际工作期间表现出较强的运动稳定性和转弯性能。
5 结论
(1)考虑到农业作业所处的工作环境需要针对传动系统和转向系统进行新的仿真设计,要确保能够符合预期的作业效果,确保能够符合机器人田间直线行驶和田头转向等基本需求。
(2)主要使用RecurDyn仿真软件来开展相关的仿真试验,要确保前轮转角参数与转弯半径符合预期的设计,要确保在垄间行走期间轮式机器人的稳定性。
(3)利用不同的试验手段針对轮式机器人的稳定性来进行相关的测试,以确保轮式机器人在田间行驶期间的功能和性能符合相关标准,测试结果表明该机器人和其移动平台可以在田垄间行驶并拥有较高的稳定性和安全性,摇摆的幅度相对较小,并不会破坏农作物。
参考文献
[1] 成艳真.基于VR场景设计的采摘机器人协同作业分析[J].农机化研究,2020,42(12):194-199.
[2] 全武生,江维,张安,等.500kV四分裂输电线路防震锤检修机器人机型设计与优化[J].电力科学与工程,2020,36(4):70-78.
[3] 于庚,凌宏杰,王志东,等.深海作业型机器人总体设计及性能分析[J].舰船科学技术,2020,42(7):90-95.
[4] 鲍明松,孙洪阳,孙增良,等.无人机与消防机器人协同侦察灭火作业系统设计[J].电子测试,2020(7):130-132.
[5] 苑葵,李素静.基于PLC的采摘机器人作业路径避障系统设计[J].农机化研究,2020,42(10):247-250.
[6] 李贇钊,袁锐波,徐成现.草莓采摘机器人行走机构设计[J].农业装备与车辆工程,2021,59(8):69-72.
[7] 何东健,张庭锋,李邦国,等.除草机器人机器视觉自动导航技术研究[J].安徽农业科学,2020,48(18):201-205.
[8] 陈思羽,邱学华,陈晨.智能草莓田间管理机器人的设计[J].安徽农业科学,2019,47(10):179-181.
[9] 王先伟,吴明晖,周俊,等.采茶机器人导航避障及路径规划研究[J].农业装备与车辆工程,2019,57(12):121-124.
[10] 林鹏.一种灵巧作业机器人的设计与标定方法[D].大连:大连理工大学,2019.
猜你喜欢
河北画报(2020年8期)2020-10-27
现代装饰(2020年7期)2020-07-27
流行色(2020年1期)2020-04-28
电子制作(2019年19期)2019-11-23
电子制作(2019年15期)2019-08-27
电子制作(2019年7期)2019-04-25
艺术启蒙(2018年7期)2018-08-23
海峡姐妹(2017年7期)2017-07-31
Coco薇(2017年5期)2017-06-05
商周刊(2017年26期)2017-04-25
