基于二维扫描声呐MS1000 的跨海高铁水下测绘研究
2023-12-19 10:27莫中生张云鹏
铁道勘察 2023年6期
莫中生 张云鹏 吴 昊
(中铁第六勘察设计院集团有限公司,天津 300308)
引言
随着我国“八纵八横”高速铁路网中长期规划的实施,我国高铁建设由传统的陆地建设,逐步迈入跨海建设。 福厦高速铁路是我国首条设计时速350 km 的跨海高铁,也是“八纵八横”主通道之一“沿海通道”的重要组成部分。 福厦高铁湄洲湾跨海大桥全长14.7 km,其中海域路由长10.8 km,连接福建省的莆田市和泉州市,是国内首座跨海高铁矮塔斜拉桥。 大桥主体跨度180 m,跨越湄洲湾规划3 000 t 级航道,桥面以上塔高30 m,共有28 根斜拉索,施工精度高、技术难度大。 在大桥施工过程中,水下测绘方面需要完成的工作如下。
(1)施工之前,对大桥设计路由区域的海床进行海底地形、地貌和障碍物调查,探明有无“深沟、凹坑、沉船、礁石、养殖区、水下构筑物”等影响施工和船舶行驶安全的因素。
(2)在施工中,对“挖泥机械抓斗”进行水下导航定位,指挥其在限定区域之内进行基坑开挖和疏浚作业。
(3)在施工中,对“水泥压块、防护网、重力锚”等水下构筑物进行水下导航定位,指挥吊机将其敷设至设计区域。
(4)在施工后,对桥墩基础进行冲刷监测,测量其冲刷或淤积厚度,以及分布范围。
以上4 项工作,传统的水下测绘方法为潜水员携带照明、通讯设备,使用测深杆、测绳、钢尺、吊锤、倾斜仪等设备,以人工测量、目视观察、触觉探摸、视频录像等手段进行。 湄洲湾三面环山,南北长约33 km,东西宽约30 km,受台湾海峡湍流和岛礁环流的联合影响,湄洲湾海域内水动力环境强劲,泥沙运移频繁,水体悬移质和含沙量均超过10 g/L,水体能见度极低,导致潜水员有效目视距离不足20 cm,水下视频录像难度大,只能趁高平潮和低平潮的憩流间隙进行测量,极大影响了施工进度。
“二维扫描声呐MS1000”基于“低频水声回波成像”的原理,在360°旋转云台的控制下,可以对“扇面区域”和“全圆区域”100 m 距离范围内的海底地貌、水下构筑物情况进行扫描成像,能够直观地显示海底地形地貌和大桥墩台基础的水下状态。 国内外学者已经基于MS1000 在海洋石油工程、港口码头工程、海洋科学调查等领域进行广泛深入的研究,总结了很多成功的案例。 成二辉等介绍了MS1000 在海底管道泄漏点查找中的应用情况[1];李东德等介绍了二维扫描声呐在海底管道隐患治理中客观性和功效性的评价方法,指出其在浑浊水域中的高分辨率优势[2];施军使用实时扫描声呐解决了软体铺排常规监测方法的滞后性问题,实现了水下铺排过程中的实时监控[3];左光磊等使用MS1000 对已建成水下沉箱进行探测,并对沉箱的安装质量进行评价[4];周梦樊等通过二维实时声呐技术在浑水域实现了精细检测,解决了浑水域修复施工的难题[5];李军通过对扫描声呐系统工作原理和特点进行研究,总结出一整套应用于近平台钻井船精细地貌调查方法,有效解决了常规物探精度较的难题[7];刘畅研究实现了对二维图像声呐检测对象的精确定位,从而提高了水下工程检测的准确性[6];淳明浩等使用扫描声呐技术解决了平台周边100 m 范围的测量盲区问题[8]。
借鉴前人在相关领域的研究成果,将二维扫描声呐MS1000 应用于湄洲湾跨海大桥的水下测绘工作中,对其硬件组成、技术原理和精度指标等进行详细介绍。 根据大桥施工中各道工序的具体需求,系统总结了MS1000 在每项工序水下测绘工作中的使用方法,以期对未来的工程应用提供借鉴。
1 MS1000 系统介绍
“MS1000 二维扫描声呐系统”是一款高精度海洋测绘声呐设备[9],主要由4 个部分组成[10],声呐探头、甲板单元、采集电脑、通讯电缆,MS1000 系统组成见图1。
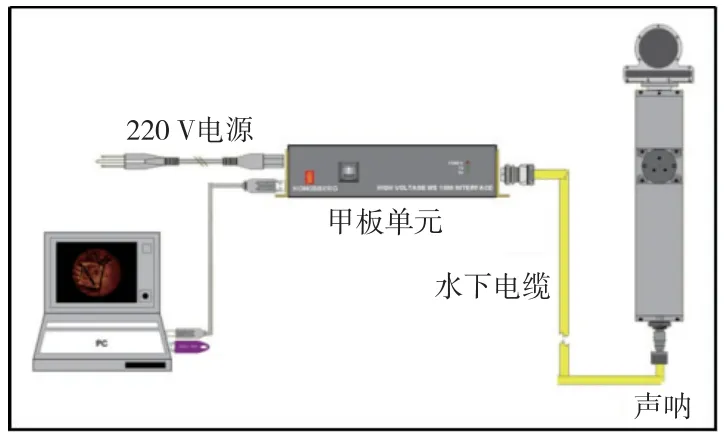
图1 MS1000 系统组成
MS1000 的换能器声波基阵开角为30°[11],波束间夹角为0.9°,扫宽和分辨率能够满足50 m 水深范围内海底高清成像,最大量程可达100 m。 MS1000 采用主动式呈像技术。 首先,MS1000 以300~1200 kHz 的频率范围发射水声脉冲并聆听回波[12];然后,声波在传播途中遇到无法穿透或绕射的物体或海底时发生反弹,形成回波被声呐基阵接收[13];声呐探头随操作云台按照设定的步进角度旋转,重复声波脉冲的发射和接收步骤,完成部分圆或全圆范围的扫测[14];最后,根据不同反射体回波的能量强度和时间延迟,进行灰度渲染后呈像[15]。 此时,利用影像结合GPS 实时采集的位置信息,就可以进行目标位置量取、形状勾绘,获取目标物体或目标范围的绝对地理坐标[16]。MS1000 的主要性能指标见表1[17]。

表1 MS1000 主要性能指标
2 工程应用
湄洲湾海域的海水最大流速可达3 m/s,最大潮差可达7 m。 崎岖的海底地形在湍急洋流的冲刷下,导致水体浑浊,传统潜水探摸测绘的有效作业时间平均每日不足2 h。 小潮期作业时间较长,每日可达5~6 h;大潮期只有高平潮期可以作业,每日约1.5 h,低平潮期转流时长只有20 min。 MS1000 系统不受洋流和泥沙的影响,可以全天候作业,只需要控制其水下的姿态即可。 MS1000 扫测时常规的安装方式为“座底式”,使用三脚架将其悬吊于顶部,然后将三脚架释放至海床[18]。 三脚架坐底后,在洋流的冲击下极易摔倒,且无法及时随船舶行进,为了保证扫测成像质量,并提高扫测效率,采用一种“配重悬吊”安装方式。 焊接一个40 cm×40 cm×150 cm 的钢结构吊笼,下部配重铁块,整体质量约1 t。 将MS1000 悬挂于吊笼顶部,声呐换能器使用旗绳在吊笼四角并拉紧。 扫测作业时,将吊笼整体吊至扫测区域,根据声呐图像调整下放深度、扫测量程、能量强度、灰度阈值等参数。
(1)海底地形、地貌、障碍物调查
沿大桥设计路由中线两侧50 m 范围布设测线,测线间隔5 m,测量船按4 km/m 航速匀速行驶,实时调整MS1000 的偏距和入水深度,尽量使其位于测线正上方。 经调查,大桥设计路由区域海底地形整体平坦,未见明显起伏和沟壑;海底以粉砂、砾砂为主[19],可见明显的底层洋流搬运泥沙痕迹(见图3);在KP2+150 处发现有大量散落的人工渔礁,呈线状分布,长度约150 m,单体直径约2 m,判断为混凝土结构,泥面以下的分布情况待查(见图2);在KP3+146 处中线右侧24 m 位置发现一艘小型沉船,长约5 m,宽约1.5 m,判断为木质渔船,泥沙掩埋不深,应为沉没不久(见图3)。
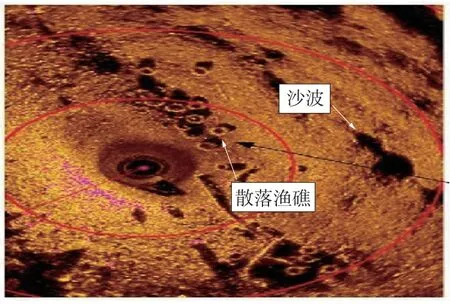
图2 沙波地貌和散落渔礁
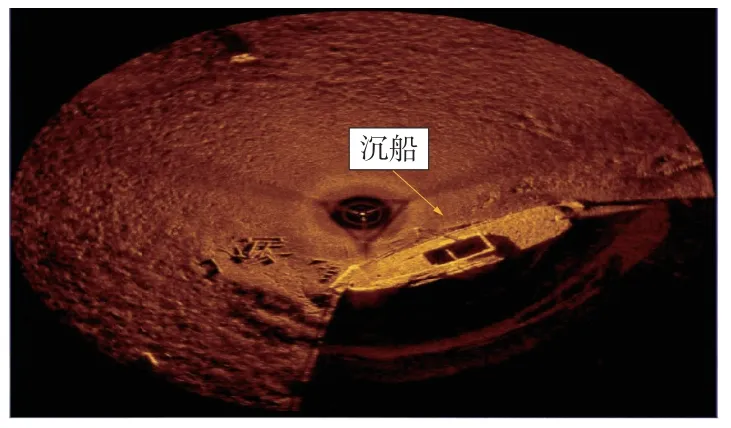
图3 海底沉船位置示意
(2)海底养殖区木桩群调查
湄洲湾水域内遍布海带、紫菜、牡蛎等各种养殖区,当地渔民一般采用“木桩串连方式”,将长约5 m的木桩插入海床下约3 m,木桩间隔1~3 m,以钢缆、绳索串联,分布范围从几百米到几千米不等,高潮时会完全淹没,低潮时部分会露出水面,给施工船舶造成了很大的风险[20]。 另外,湄洲湾养殖年代久远,期间产权更替频繁,造成海底木桩群分布不明,施工船舶不敢贸然进入。 趁高平潮憩流间隙,在当地渔民向导的带领下,将MS1000 悬吊于木桩群可能存在区域,缓慢调整其入水深度,采用“360°全圆”扫测模式,设扫描步进为1(°)/s,发现可疑区域后,再减慢为0.25(°)/s。经扫测,在大桥路由区域的KP0+734~ KP1+863、KP2+397~KP3+055、KP6+024~KP8+547 等3 处区域存在大范围木桩群,见图4、图5。 此3 处木桩群均横向穿越大桥设计路由,分布宽度距离设计轴线超过50 m。 其中,第3 处木桩群范围最大,长约1 500 m,宽约140 m,呈长方形分布,斜向跨越大桥路由中线,此处水深较深,低潮时木桩群也不会露出水面,高潮时水深为3~5 m。

图4 木桩群低潮时露出水面

图5 木桩群声呐影像
(3)水泥压块安装
为防止急速洋流对桥墩基础附近海床的冲刷,造成凹坑、塌陷等风险,需要在桥墩基础四周30 m×30 m范围内铺设水泥压块。 水泥压块入水后,MS1000 跟随其悬吊于正上方,采用10~20 m 小扫测量程,以确保清晰看到桥墩基础的边沿。 在声呐图像上实时量取当前水泥压块至桥墩基础外沿的距离,以及当前压块至已经铺设的相邻压块的距离,确认好位置,将压块铺放至指定位置(见图6、图7)。 传统人工潜水方式需要先将压块盲铺至大概位置,由潜水员在水下测量当前压块至临近压块和桥墩的距离、方位和相互关系,然后再重新起吊下放,一般需要往复3~5 次才能铺设到位。 在MS1000 的辅助下,只需1 次即可完成,并且大幅降低了潜水员与水下吊装的风险,将120~180 d 的工期缩短至14 d。
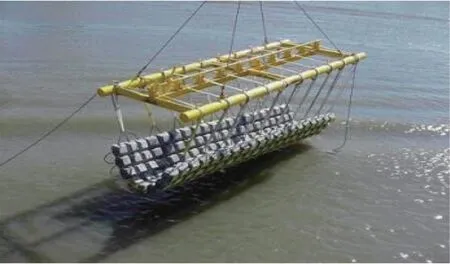
图6 水泥压块
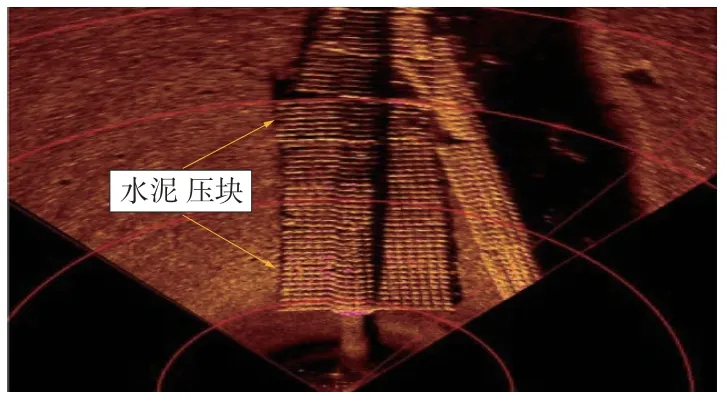
图7 水泥压块声呐影像
(4)桥墩基础基坑挖掘实时
桥墩基础施工前,要在设计位置处进行水下基坑挖掘作业,基坑尺寸为20 m×25 m×5 m。 将MS1000 置于基坑区域一侧,下放至距海底约2 m 高度,距设计位置水平距离约15 m,设置扫测量程为80 m,扫测频率为900 kHz。 首先使用“360°全向”模式快速扫描确定基坑区域;再使用“扇面”模式缩短扫测量程至50 m,设置扫描步进为0.45(°)/s,重点扫描挖掘区域。 机械抓斗在声呐影像上会呈现红色的强反射,结合其外部形状, 可以直接观察其所在的位置。 使用MS1000 软件的区域测量功能圈绘出当前的挖掘区域,并实时测量其长、宽和深度,实时调整抓斗的挖掘位置(见图8、图9)。

图8 挖掘机械抓斗
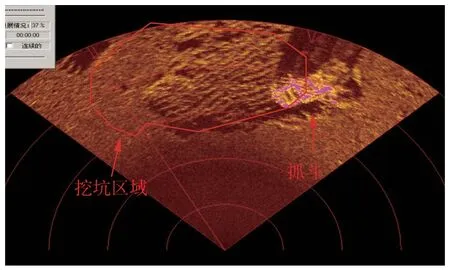
图9 抓斗和基坑声呐影像
(5)重力锚水下安装
为辅助施工船就位,需要在水下安装2 只300 t 重力锚(命名为1 号、2 号),呈并联式摆放,坐底后方位角设计为真北340°,迎合主流向方向。 根据锚缆拉力计算,2 只重力锚的安装方位偏差不能超过20°,否则其摩擦力和抓地力将无法抵御洋流推力,出现溜锚后船舶失位的风险。 因此,需要在重力锚安放过程中监控其方位角度,并确认其最终的坐底方位。 将重力锚吊至海床上方1 m 后,再将MS1000 吊至重力锚侧边,距重力锚约10 m,设置扫描量程为40 m,频率为700 kHz,扫描速度为0.45(°)/s。 从声呐图像上量取重力锚短边中点至长边中点的方位角,指挥绞车收放钢缆,使2 只锚块的方位角度在误差允许范围内。 待重力锚自沉入泥稳定后,再次量取其方位角度,与设计角度比对,作为最终的坐底方位角。 重力锚安装示意见图10、重力锚声呐影像见图11。
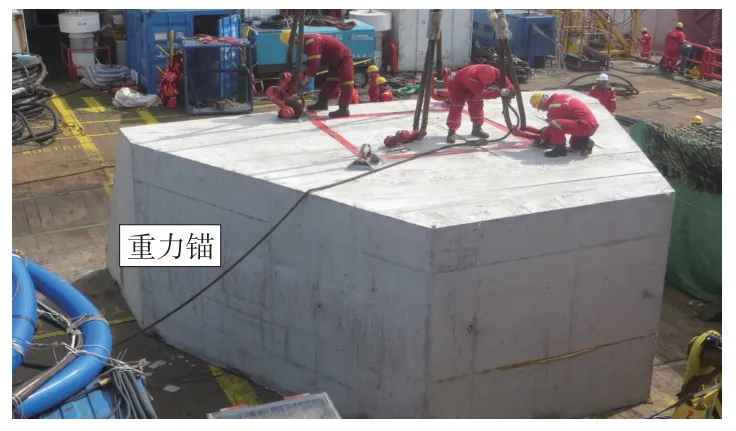
图10 重力锚安装示意
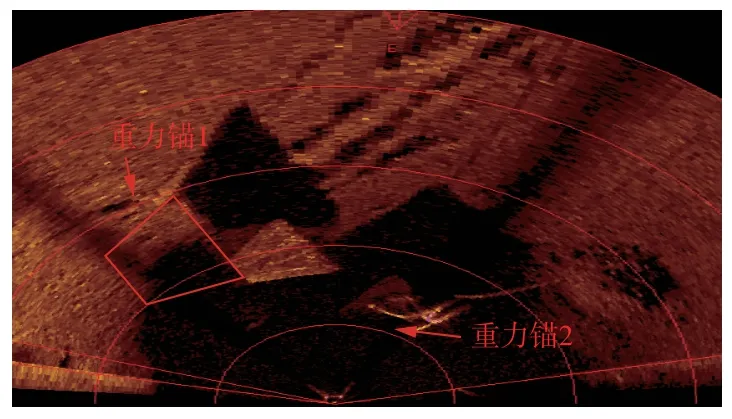
图11 重力锚声呐影像
(6)防护网水下安装
为防止桥墩基础施工时周边泥沙的快速淤积和渔业捕捞网具的干扰,需要在施工区域四周安装水下防护网。 单张防护网高约3 m,长约20 m。 为防止防护网遗失和破损,需要定期检查其水下状态。 将MS1000 从其外侧吊放至距海底约5 m 处,施工船采用动力定位模式沿防护网外侧缓慢航行。 在航行过程中,MS1000 会受水流和推进器涡流影响而转动,使用“360°全向”模式扫测,设置扫描量程为50 m,扫描频率根据实时图像情况调整为800~1 000 kHz,扫描速度为0.9(°)/s。 防护网在声呐图像上呈现强反射,对比松软海床的回波图像,防护网的声呐影像清晰易判别,防护网安装示意见图12,防护网声呐图像见图13。

图12 防护网安装示意

图13 防护网声呐图像
(7)桥墩基础冲刷监测
泉州港为湄洲湾内最大港口, 年吞吐量约1.2 亿t,其3 000 t 级航道横向穿越大桥的12 号和13 号桥墩。 受湾内水动力环境和航道疏浚的联合影响,此处区域的海底冲刷较其他区域更为强烈,故需要对12 号和13 号桥墩基础进行长期冲刷监测,分析其冲淤规律。 采用“潜水安装”的方式,将MS1000 固定于桥墩结构外侧。 为尽量减少桥墩本身对声波的遮挡,将换能器伸出桥墩约2 m,距离海底约5 m。 采用360°全圆观测模式,设置扫描量程为50 m,扫描频率为1 200 kHz,步进速度0.25(°)/s。 在桥墩上方安装控制机柜,内置采集电脑,每12 h 扫测1 次。 使用网络传输装置,将采集数据传输至陆地分析中心。 使用后处理软件,将数据进行滤波、纠正、融合、镶嵌等处理,并生成三维渲染图。 通过3 个月的扫测数据分析,12 号桥墩涨潮流方向的冲刷凹坑范围较大,长约50 m,平均深度为0.5 m,最深处为0.8 m;落潮流方向冲刷范围较小,平均深度为0.2 m。 由此可见,水泥压块起到了很好的防护作用,12 号桥墩四周没有出现大范围的遗失或陷落,见图14。 13 号桥墩四周未见明显冲刷,仅有两处微小的浅坑,深度约为0.2 m,见图15。
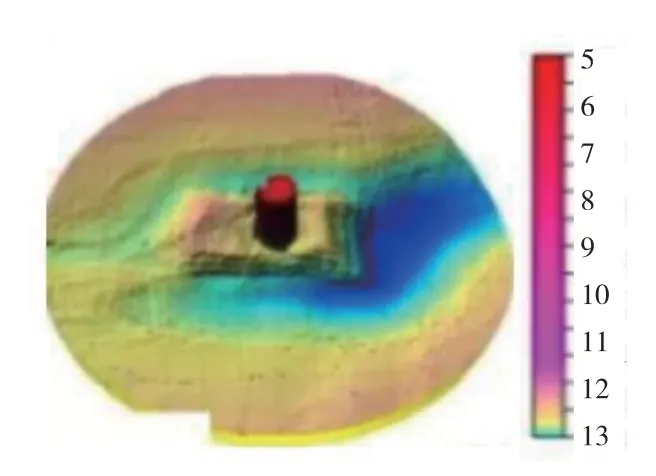
图14 12#桥墩周边冲刷(单位:m)
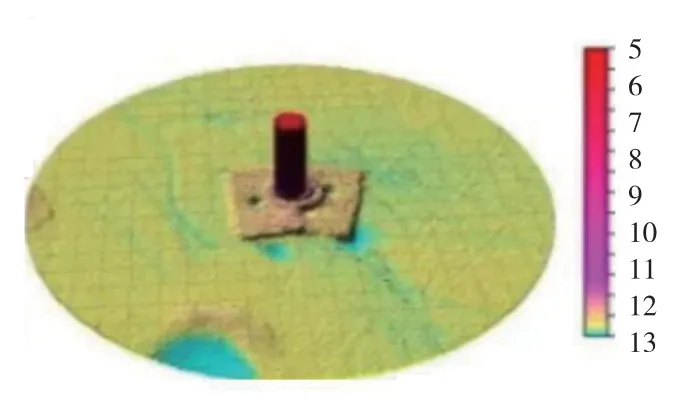
图15 13#桥墩周边冲刷(单位:m)
3 结语
以福厦高铁湄洲湾跨海大桥为例,介绍了“二维扫描声呐MS1000” 水下测绘方面的应用。 通过MS1000 扫测调查,在大桥设计路由区域共发现散落渔礁1 处、海底沉船1 艘、海底养殖区木桩群3 处。 在MS1000 的辅助下,将原本120~180 d 的水泥压块铺设时间缩短为14 d,极大提高了施工效率。
MS1000 具有安装简单、使用方便、图像清晰、测量精度高等优点,它不受潮流、风浪等外部因素制约,有效解决了高铁跨海大桥建设中潜水探摸不直观、无法整体描述施工情况的弊病。 尤其对于水体浑浊、能见度低等可视调查无法开展的区域,MS1000 大幅降低了潜水员水下作业的强度和风险,为指导现场施工提供了很大的帮助。 在未来的研究和应用中,还可以探索“水下六维姿态传感器”“光纤罗经”“惯性导航系统”“超短基线USBL 水下定位系统”等组合导航定位系统与MS1000 的融合使用,为高铁跨海建设提供更高效、快捷、直观、精确的海洋测绘手段。
猜你喜欢
山西冶金(2023年11期)2024-01-07
汽车工程师(2023年11期)2023-11-15
机械工业标准化与质量(2023年7期)2023-09-25
时代汽车(2023年2期)2023-02-11
江苏安全生产(2022年11期)2023-01-11
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小猕猴智力画刊(2017年6期)2017-07-03
故事作文·高年级(2016年8期)2016-08-25
现代工业经济和信息化(2016年7期)2016-05-17
小小说月刊·下半月(2015年2期)2015-05-14