主瓣掩护式干扰下单脉冲雷达目标检测方法
2023-12-27 07:18张庭赫黄学宇张启亮
空军工程大学学报 2023年6期
张庭赫,黄学宇,张启亮
(空军工程大学防空反导学院,西安,710051)
当干扰从旁瓣进入时,自适应凹口位于旁瓣区域,常规自适应波束形成技术(adaptive digital beam forming,ADBF)能在干扰方向形成零陷,有效抑制旁瓣干扰[1]。此外,旁瓣对消[2-3]、旁瓣匿影[4-5]等抗干扰技术也能对旁瓣干扰起到较好抑制作用。然而,当干扰从主瓣方向进入时,干扰信号会获得与目标信号相近的增益,造成信干噪比下降,主瓣方向偏移等问题,增加了雷达干扰对抗难度[6]。
针对主瓣干扰抑制问题,研究人员提出了一系列有效方法。其中阻塞矩阵(blocking matrix processing,BMP)[7-8]方法和特征投影(eigen-projection matrix processing,EMP)[9-10]方法因操作简单,便于工程实现而被广泛应用。文献[11]提出了一种EMP预处理零陷加深(EMP zero deepening,EMPZD)算法,通过加深零陷降低干扰对天线自适应方向图的影响。文献[12]提出了一种单脉冲雷达空域滤波(monopulse radar spatial filtering,MRSF)算法,利用改进型最小方差无偏估计(minimum variance distortionless response,MVDR)算法对接收信号进行波束间空域滤波,令输出信号的改善因子最大化。文献[13]通过改进阻塞矩阵(improved BMP,IMBMP)算法以得到比传统BMP算法更强的抗干扰性能。文献[14]利用主瓣干扰对消(mainlobe jamming cancellation,MLC)算法对主瓣干扰进行处理。文献[15]提出了一种将BMP与协方差矩阵重构(covariance matrix reconstruction,CMR)结合的BMP-CMR算法,可有效改善天线自适应方向图。文献[16]提出一种基于大孔径辅助阵列天线的抗干扰方法,运用自适应信号处理算法对主天线与辅助天线接收到的信号进行自适应干扰抑制,其抗干扰性能主要由辅助天线孔径决定。
通过对上述方法进一步分析可知,主瓣掩护式干扰背景下的目标检测性能主要受限于天线孔径及目标与干扰视线夹角。针对此问题,本文提出一种基于分布式辅助天线的改进型单脉冲雷达抗主瓣掩护式干扰方法。对比文献[16],本文方法中的辅助天线为孔径更小的单天线,且辅助天线数量不会受到阵元间距等参数限制。
1 信号模型
本文提出的分布式多天线系统由1个主天线和2个辅助天线组合而成。主天线为均匀阵列单脉冲天线,包含M1×M2个阵元;2个辅助天线均为抛物面天线。辅助天线1与主天线的距离为D1,辅助天线2与主天线的距离为D2。该系统如图1所示。

图1 分布式多天线系统组成框图
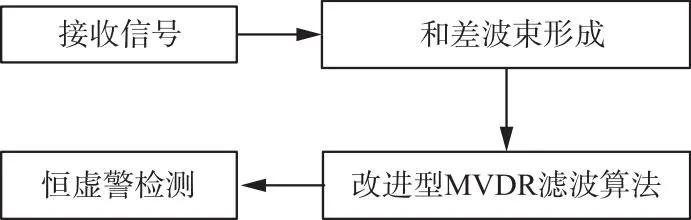
图2 算法流程图
主瓣干扰背景下,该系统的接收信号可表示为:
X=GS+N
(1)
式中:X=[x∑,xΔε,xΔd,xa1,xa2];G为增益矩阵;S为目标信号和干扰组成的矩阵;N表示各个接收通道内的噪声。此处假设各通道内的噪声为独立同分布零均值高斯噪声。
增益矩阵G可表示为:
G=[gj,gt]
(2)
式中:gj=[g∑j,gΔej,gΔbj,gΔdj,gaj1,gaj2]T为干扰增益向量;gt=[g∑t,gΔet,gΔbt,gΔdt,gat1,gat2]T为目标信号增益向量。g∑j、gΔej、gΔbj、gΔdj分别代表干扰和通道增益、俯仰差通道增益、方位差通道增益、双差通道增益[12]。gaj1、gaj2分别代表辅助天线1,辅助天线2产生的干扰增益。g∑t、gΔet、gΔbt、gΔdt分别代表目标信号和通道增益、俯仰差通道增益、方位差通道增益、双差通道增益。gat1、gat2分别代表辅助天线1、2产生的目标信号增益。
接收信号S可以表示为:
(3)
式中:Q为快拍数。
2 算法原理
本文通过对分布式多天线系统输出信号进行波束域自适应滤波处理抑制干扰信号,并进一步利用恒虚警检测准则检测目标信号。算法流程见图1。
2.1 改善因子
抗干扰改善因子(electronic counter-countermeasure improvement factors,EIF)[17]是衡量雷达抗干扰措施对抗干扰性能改善程度的重要指标。通常用采取了抗干扰措施的输出信干比(signal to jamming ratio,SJR)与输入SJR的比值来计算EIF。但在实际中,干扰与噪声很难分离,因此,本文用信干噪比(signal to jamming plus noise ratio,SJNR)代替SJR计算EIF,此时计算公式为:
(4)
式中:SJNRI和SJNRO为采用抗干扰措施前后的SJNR。
2.2 空域滤波
本文对接收信号X进行波束域滤波以抑制干扰信号。为了EIF最大化,滤波器参数需满足如下优化模型:
(5)
式中:gt为目标信号的增益矢量;w为待求空域滤波器。约束条件wHgt=1用于保证滤波器对目标信号保持恒定增益。
用拉格朗日乘子法求解该优化模型,定义:
ζ=wHXXHw+λ(wHgt-1)
(6)

w=λ(XXH)-1gt
(7)
将式(7)代入式(5),得到:
(8)
将式(8)代入式(7)有:
(9)
则滤波输出为:
s=wHX
(10)
2.3 恒虚警检测
本文利用恒虚警检测算法进行目标检测。恒虚警检测器原理如图3所示。

图3 恒虚警检测器原理框图
图3中xn(n=1,2,…,N)为前沿滑窗的参考单元电压,yn(n=1,2,…,N)为后沿滑窗的参考单元电压。P为被检测单元功率。基于信号瞬时功率进行目标检测时,自适应判决准则为:
(11)
式中:Pth为功率检测门限。
对Pth进行计算时,假设所有采样单元内的噪声为独立同分布零均值复高斯噪声,即X~CN(0,σ2/2),Y~CN(0,σ2/2)。其中σ2为噪声方差。则被检测单元噪声功率PN服从指数分布[18],且其概率密度函数可以表示为:
(12)
因此,虚警率Pfa与检测门限Pth的关系可表示为:
(13)
由式(12)解得门限Pth为:
Pth=-σ2lnPfa
(14)
工程运用中,σ2可通过最大似然估计法计算,即:
(15)
(16)

结合式(14)与式(15),可确定检测门限为:
(18)
3 仿真验证
3.1 参数设置
假设本文提出的分布式多天线系统由1个阵元数80×80的主天线和2个辅助天线组成。其中主天线的阵元间距为半波长,辅助天线与主天线的位置关系见图1。D1=20 m,D2=30 m。主天线和2个辅助天线的俯仰维、方位维波束指向均为0°,3 dB波束宽度均为1°。2个辅助天线的方向图建模为sinc函数,且增益均为38 dB。快拍数Q=2 000。信号空间存在1个目标信号和1个与目标信号互不相干的主瓣干扰信号。其中目标信号的波长为0.05 m,干扰信号来向的俯仰角和方位角均为0°,噪声为独立同分布的高斯白噪声,接收信号的SJR为-30 dB。目标雷达截面积变化规律符合Swerling I模型。验证EIF和检测概率随目标角度的变化情况时,目标信号俯仰角和方位角均在-0.5°~0.5°范围内,按步进量0.05°进行取值,信噪比为20 dB;验证EIF和检测概率随SNR的变化情况时,目标信号俯仰角和方位角均为0.5°,信噪比在-10 dB~10 dB范围内,按步进量1 dB进行取值。
3.2 计算EIF
为验证所提算法的抗干扰性能,以输出EIF为标准,将所提算法的输出EIF作对比。其中,MRSF算法所用天线为与主天线规格相同的单脉冲天线。根据式(4),分别计算6种算法的输出EIF,进行1 000次蒙特卡洛实验取均值。不同算法的输出EIF随目标信号俯仰角和方位角的变化曲线见图4。
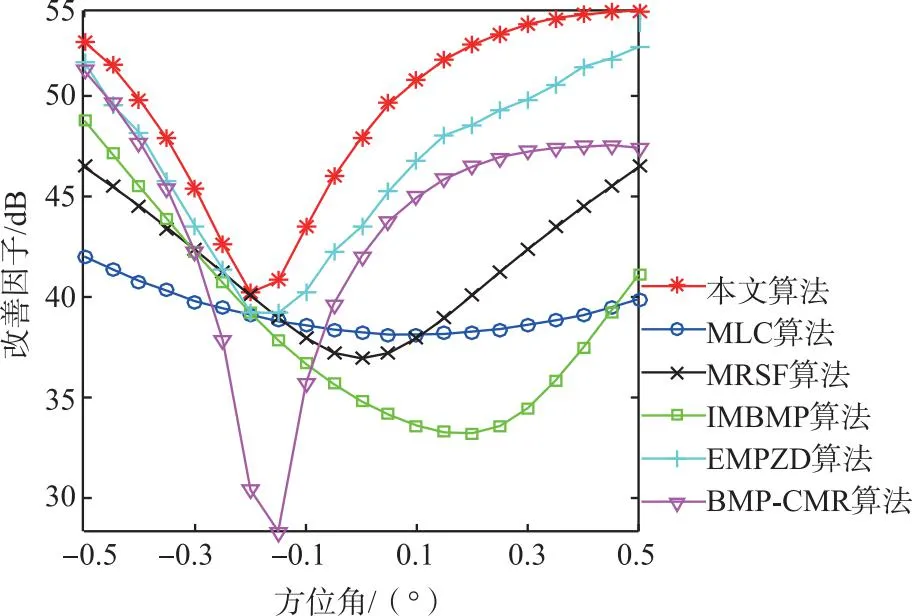
(a)俯仰角为0.15°
从图4可看出,当干扰从主瓣方向进入时,6种算法的输出EIF均有波动。此外,在同等条件下,本文算法的输出EIF在各角度下均高于另外5种算法,证明本文算法抗干扰性能更强。
为研究本文算法抗干扰性能与输入SNR的关系,计算不同SNR下本文算法与另外5种算法的输出EIF,并进行对比。进行1 000次蒙特卡洛实验,不同算法的输出EIF结果见图5。
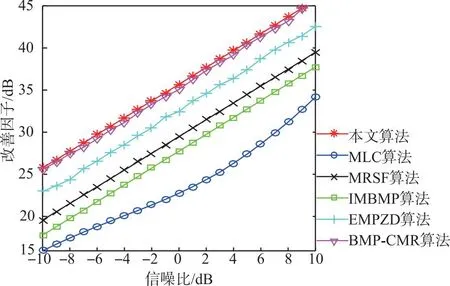
图5 固定角度下EIF随输入SNR的变化曲线
从图5可以看出,在目标角度不变的情况下,随着信噪比增大,输出EIF也随之增大,本文算法的输出EIF高于另外5种算法,证明了本文算法拥有更好的抗干扰性能。
3.3 检测概率计算
为验证所提算法的检测性能,将本文算法的检测概率分别与3.2节中5种算法进行比较,仿真参数相同。采用2.3节中的CA-CFAR算法计算检测概率,设参考单元为20个,保护单元为6个,虚警概率Pfa=1×10-6。在每个角度下进行1 000次蒙特卡洛仿真。6种算法的检测概率见图6。

(a)俯仰角为0.15°
从图6中的结果可看出,在主瓣干扰环境下,当目标信号与主瓣干扰的视线夹角接近时,6种算法的检测概率均有下降,且固定方位角时,MLC算法检测概率接近0。理论分析是此方位角下改善因子过低导致漏警,严重影响目标检测概率。从图6还可看出,相同条件下,本文算法的检测概率随着角度变化波动较小,检测概率高于另外5种算法,证明了本文算法检测性能更强。
为进一步观察本文算法检测概率与输入SNR的关系,计算6种算法的检测概率,对应的检测概率随SNR变化情况见图7。

图7 固定角度下检测概率随SNR的变化曲线
从图7可以看出,随着SNR增大,检测概率逐渐增大。且在相同条件下,本文算法检测概率相较于其他5种算法更高,与图5中改善因子相对应,证明所提算法检测性能良好。
4 结语
本文提出了一种基于分布式辅助天线的改进型单脉冲雷达抗主瓣掩护式干扰方法。与大多数文献中侧重于算法改进不同,本文从天线入手,将MRSF算法中的单脉冲天线改为分布式多天线,利用天线间的波程差,降低空域滤波时干扰的分离难度。该方法性能稳定、复杂度较低,由于不需要大孔径天线,因此相比于文献[16],本文方法更易于工程实现,由于本文方法中辅助天线数量不受限制,且该方法性能和天线数量成正比,因此理论上,本文方法的性能上限比文献[16]更高。仿真结果表明:相较于另外5种算法,所提方法可有效提升干扰视线夹角较小时的抗干扰性能和目标检测概率。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
航天控制(2020年5期)2020-03-29
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
中国交通信息化(2017年10期)2017-06-06
祖国(2016年20期)2016-12-12
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
现代防御技术(2014年6期)2014-02-28
电子设计工程(2014年18期)2014-02-27