依据SIFT 算法的排球运动员急停起跳动作识别方法
2023-12-27 05:05侯皖东
新乡学院学报 2023年12期
侯皖东
(安徽文达信息工程学院体育教学部,安徽 合肥 230000)
通过对运动过程的细致观察和精确测量,可以更好地理解运动员的动作和技巧,进行改进和提高。排球运动要求运动员具备高度的技巧和策略, 急停起跳是排球比赛中常用的一种技术动作, 它对于运动员的爆发力、协调性和反应速度都有很高的要求。在排球运动员的训练中, 准确识别和评估运动员的急停起跳动作是非常重要的。 它可以帮助教练员和运动员更好地理解运动员的技术缺陷, 从而进行有针对性的训练和改进。 细致观察和精确测量运动过程不仅可以用于排球运动员的训练和比赛, 还可以广泛应用于其他运动项目的科学训练和比赛策略的制定。
目前相关领域学者对人体动作识别研究成果很多:文献[1]提出了一种基于改进3D 卷积网络的人体动作识别方法。融合多级特征和多组通道注意力特征,对3D 卷积网络进行改进, 建立了视频人体动作识别模型,实现人体动作识别。 文献[2]提出了一种基于三维卷积神经网络(3DCNN)的人体动作识别方法。 采用Leaky ReLU 激活函数, 实现对静态神经元的修复,深度提取影像间时空信息, 以丰富网络的特征结构。 同时, 结合分批规范化过程, 对信息素点进行规整再分配, 从而有效地实现了特征的抽取, 加快了算法的收敛。然而,上述两种方法在处理长时间序列的效率和复杂动作的鲁棒性, 以及数据样本质量和数量对识别精度方面存在一定的局限性。为此,本文提出一种基于尺度不变特征转换(SIFT)算法的动作识别方法。 针对排球运动员急停起跳动作区域,提取多元动作特征数据,并结合SIFT 算法,提取急停起跳动作特征,实现动作识别,提高动作识别的效率。
1 基于SIFT 算法的排球运动员急停起跳动作识别方法
1.1 排球运动员急停起跳动作区域提取
为对排球运动员急停起跳动作进行有效识别,首先通过构建图像获取模型, 对急停起跳动作的运动区域进行提取,并将识别动作与背景进行分离处理,从而提高识别效果。通过设置图像阈值,将目标识别动作与背景图像进行分割,有效提高后续识别的精度[3-5]。 对此,需要对排球运动员急停起跳动作的图像进行采集,通过综合动作信息数据库、设备模型以及其他模型,获取急停起跳动作的结构数据以及边缘特征。 通过对特征进行扫描,并与动作标识信息进行匹配,从而实现识别对象的图像获取。对此,构建出的图像获取模型具体工作流程如图1 所示[6]。
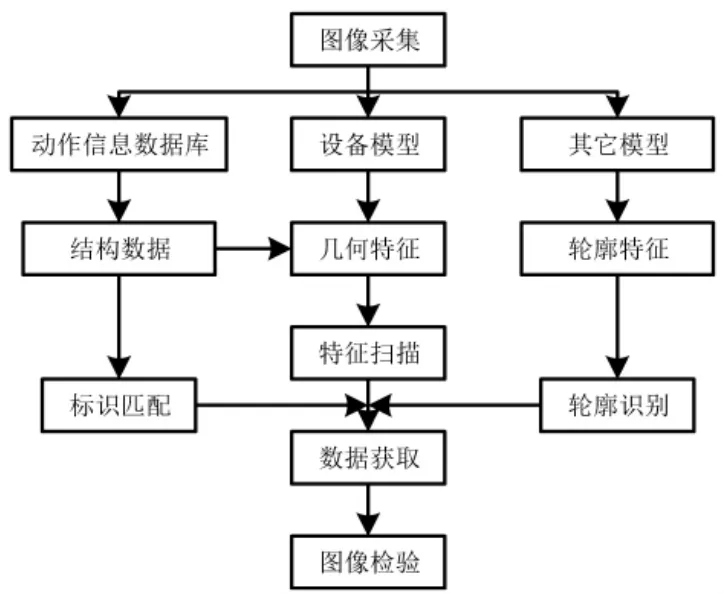
图1 图像采集流程
通过上述图像采集流程可以看出, 从动作信息数据库中提取到人体结构动作数据, 并与识别对象动作的轮廓识别结果进行标识匹配[7]。 通过将文字标识以及急停起跳动作的分解动作轮廓数据进行匹配, 将标识匹配结果作为同一组数据进行存储, 方便后续对动作进行识别时可以直接将轮廓匹配结果与识别对象进行对比。在急停起跳动作的轮廓提取中,需要先将识别对象动作的轮廓从图像中进行抽取[8]。 为提高轮廓抽取效果,针对图像边界点进行膨胀操作处理,扩充完成后的动作视频序列为
其中,u代表动作视频序列,v代表膨胀操作扩充参数,b代表人体结构动作要素,ω代表排球运动员动作图像边界点,z代表图像轮廓腐蚀参数。通过上述操作不仅提高轮廓的抽取效果, 也能对动作区域的尺寸进行统一调整,从而得到大小相同的运动区域图像数据。由于排球运动员在做急停起跳动作时,动作幅度较大,运动视频中每帧图像的动作均有所不同。 因此为保证动作区域的提取效果, 采用帧间差分法对运动视频中的图像进行处理
其中,xk+d和xk分别代表排球运动员视频序列中的第k+d帧图像以及第k帧图像,T表图像静止阈值。 当D>0 时, 表示第k+d帧图像与第k帧图像的像素值为非静止状态,此时需要对其进行二次分帧处理,从而得到新的分帧图像。 当D=0 时,表示此时分帧处理后的图像像素值均为静态, 可以对其进行动作区域提取处理。 通过上述操作获取到的图像即为差分图像, 可以从该图像集合中选取一组具有动作变化的图像作为提取对象[9]。 考虑到每个差分图像中所包含的动作信息数据均有所不同, 因此通过权重分配的方式, 将动作区域与图像位置信息进行匹配处理。 处理公式为
其中,和分别代表向前传播与向后传播的动作视频序列,ut代表提取完动作区域的视频序列,和分别代表输入参数和输出参数,bi代表动作像素的坐标位置信息,ϖ代表差分图像数据的位置分布权重。 通过上述步骤即可将位置分布权重重新分配给不同的差分图像,以保证每组差分图像中,动作区域与背景区域的权重具有明显差异。 通过对位置分配权重设定阈值, 即可实现对于动作区域的有效提取[10]。
1.2 基于SIFT 算法的急停起跳动作特征提取
由于SIFT 算法具备较高的匹配性能,可以针对图像之间的平移或变化情况进行特征点匹配。 因此针对上文中划分出的动作区域图像,采用SIFT 算法对排球运动员的急停起跳动作特征进行提取。 通过生成尺度空间,并对极值点进行定位,从而生成关于急停起跳动作的关键点描述。为方便提取,首先构建出人体有向时空骨架图,通过提取人体骨骼线条以及关节节点位置,将急停起跳动作图像中的动作结构进行简化处理。 以常规的人体骨架为例, 通过将人体骨架简化为一个躯干以及两条腿和两条手臂,突出关键关节节点,来描述运动员的动作信息。 人体骨骼关节的具体简化效果如图2 所示。

图2 人体有向时空骨架图简化效果
将人体骨骼进行简化处理,得到关键关节节点,然后采用SIFT 算法生成二维尺度空间,即
其中,I(x,y)代表运动区域原始图像,σ代表图像变化尺度,G(x,y,σ)代表高斯卷积核。 图像变化尺度越大,说明尺度空间中整体特征越明显,对于其他噪声的抵抗能力也就越强。则在该二维尺度空间中,可以求出运动区域原始图像中每个像素点对应的SIFT 特征点信息
其中,m(x,y)代表SIFT 特征点对应的灰度梯度幅值,θ(x,y)代表灰度梯度方向,Lx和Ly分别代表像素点(x,y)对应的二维尺度。 通过上述公式即可求出运动区域图像中每帧图像对应的灰度梯度幅值以及灰度梯度方向,然后对极值点进行定位处理。通过检测二维尺度空间中的极值大小, 将对比度较低或不明显的极值点进行剔除,保留极值较为明显的点,从而获取关键点的尺度空间值。 由此构建出的急停起跳动作特征矩阵表达式为Eedge=[lmn]M×N,其中,M×N代表矩阵尺寸,lmn代表矩阵中的动作特征元素。以关键特征点为中心的二维尺度空间中, 通过对特征点的梯度进行集成处理,可以得到动作特征参数
其中,λ代表急停起跳动作特征参数,Lm代表梯度集成尺度,K代表特征维度,ξ代表图像边缘强度。 通过上述步骤即可提取出急停起跳动作特征, 获得动作特征参数,为后续的动作识别提供帮助。
1.3 急停起跳轮廓检测与动作识别
在完成了对于急停起跳动作的特征提取后, 通过检测动作的轮廓曲线,并对轮廓波域进行平滑处理,从而实现动作识别。由于在排球运动员的运动视频中,存在非急停起跳动作的其他运动动作, 为保证对于急停起跳动作的识别效果,引入动作相关度这一参数,用于表征急停起跳动作与其他动作之间的相关程度。 在二维尺度空间内,将获取到的急停起跳动作特征向量进行组合,获得急停起跳动作图像的轮廓波域矩阵
其中,H代表急停起跳动作图像的轮廓波域矩阵,γi代表动作特征向量,Ip代表识别对象动作与非识别对象动作之间的相关度,λi和λj分别代表识别对象动作特征以及错误动作特征。 对上述公式进行一阶泰勒展开, 可以得到急停起跳动作轮廓波域的特征函数
其中,P(i)代表急停起跳动作的轮廓波域偏导函数,d代表人体动作的协方差,p m(m)和p n(n)分别代表特征概率密度函数以及噪声概率密度函数。 通过上述公式即可构建出急停起跳动作的轮廓波域特征函数,从而实现对识别动作的轮廓检测。 为获取更为准确的动作识别结果, 通过求取识别动作轮廓边缘特征的跟踪信息,对轮廓波域进行平滑处理,即
其中,a代表信息熵向量,G代表轮廓平滑参数,R代表动作轮廓线的角点特征参数,υ(i)代表平滑处理结果。 通过上述步骤即可完成对于急停起跳动作轮廓波域的平滑处理, 从而得到更为清晰的动作轮廓曲线。 将急停起跳动作的轮廓曲线与原始视频中动作序列中的轮廓曲线进行对比,结合动作相关度这一指标,即可从原始视频序列中识别出急停起跳动作[15]。
完成排球运动员急停起跳动作的有效识别后,后通过对动作轮廓波域进行平滑处理, 得到识别对象动作的轮廓数据。 将动作区域提取以及特征提取等相关内容进行结合,设计基于SIFT 算法的排球运动员急停起跳动作识别方法。
2 实验论证
2.1 实验说明
为验证提出的基于SIFT 算法的排球运动员急停起跳动作识别方法的有效性, 实验选取了2 种常规的急停起跳动作识别方法作为对比对象, 分别为基于计算机视觉的急停起跳动作识别方法和基于分层运动姿态的急停起跳动作识别方法。通过构建实验平台,采用3 种识别方法对同一组动作视频进行识别, 对比不同识别方法的实际性能。
2.2 实验准备
实验选取的实验数据集为KTH 数据集,该数据集是目前规模较大的人体动作数据集。 数据集中针对不同的人体动作均包含1 000 组以上的动作数据, 且每组动作数据均有不同的运动场景, 具体包括固定室内场景、固定室外场景、人体穿着变化场景以及室外光照条件变化场景。 数据集中的人体动作姿态数据以视频数据为主,视频图像大小为160×120。 为保证实验结果的可靠性,实验从KTH 数据集中随机选取不同运动场景下, 包含急停起跳动作的运动视频数据作为实验对象,采用仿真软件对视频中的肢体动作进行建模,具体建模效果如图3 所示。
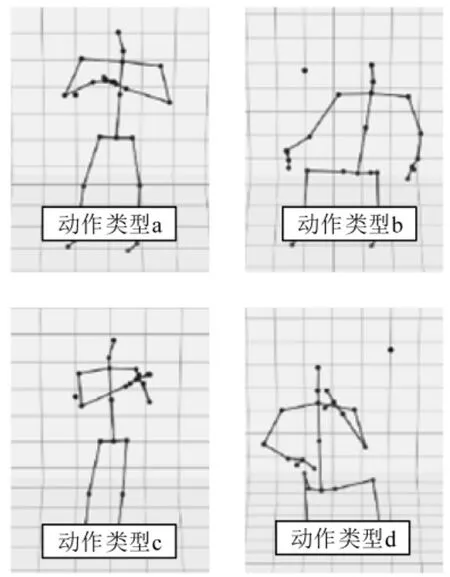
图3 数据集人体肢体动作建模结果
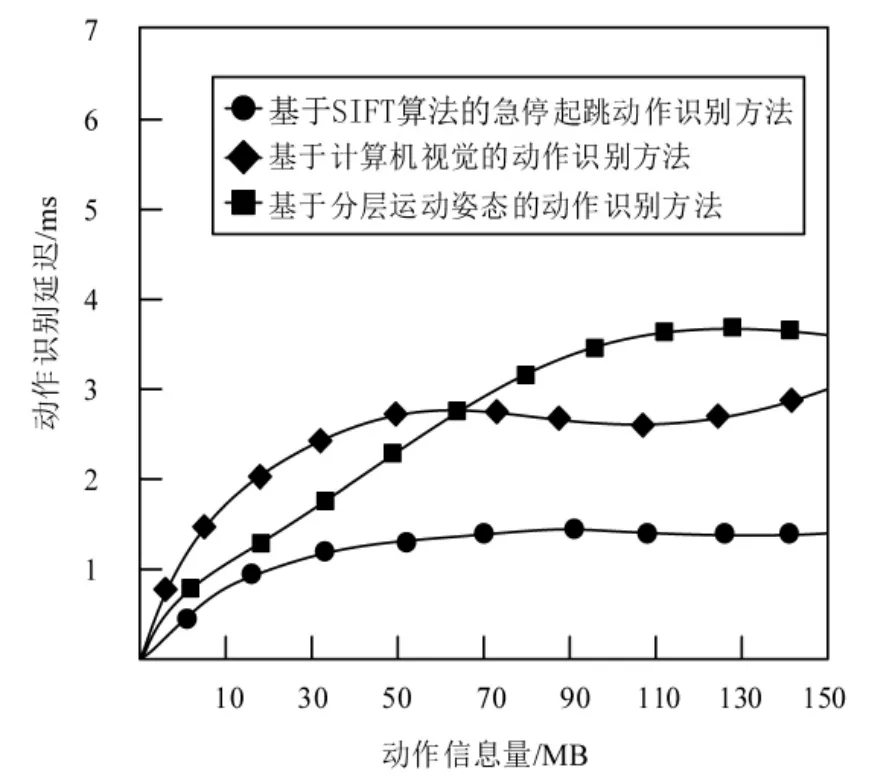
图4 图像帧数为60 时动作识别延迟对比结果
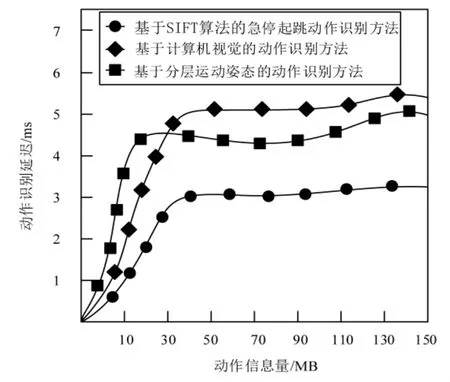
图5 图像帧数为90 时动作识别延迟对比结果

图6 图像帧数为120 时动作识别延迟对比结果
为保证实验效果, 实验针对建模完成的人体肢体关键部位进行编号, 方便对不同的动作进行分类以及规划处理。 人体关键点的编号结果如表1 所示。

表1 人体关键点编码结果
实验从原始数据集中, 共采集2 400 条排球运动员运动数据,动作类型包括跨步急停、跳步急停以及并步急停,每组运动数据均包括4 种不同的运动场景,具体数据集如表2 所示。
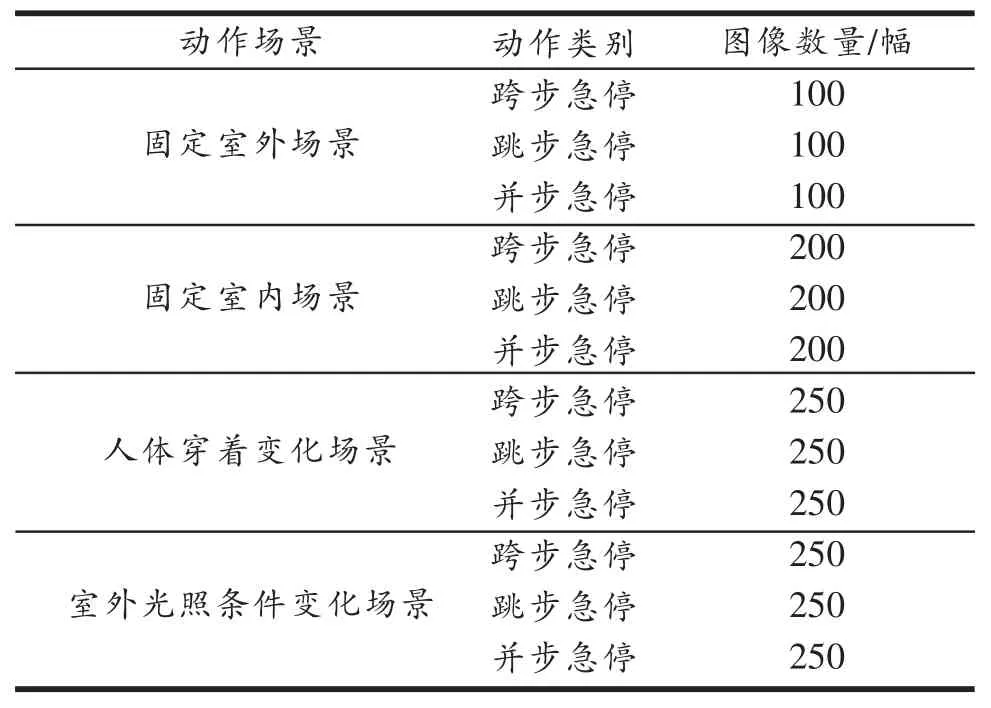
表2 排球运动员四种不同的运动场景数据
实验共分为2 个阶段进行, 分别为算法训练阶段以及样本测试阶段。在算法训练阶段,通过随机调取原始数据集中的动作视频数据, 针对3 种识别方法进行训练,并将训练集输出的数据作为网络输入值,对算法进行迭代优化处理。针对提出的动作识别算法,将算法迭代次数设为150 次, 将灰度直方图中的方向数量设为4,方向角ϕ的取值范围设为[-90°~+90°],每个SIFT 描述算法中均包含64 个梯度直方图。 待算法训练成熟后, 采用3 种识别方法对实验测试样本数据进行识别。
为保证实验结果的科学性, 本次实验通过改变原始数据集中的图像帧数, 将其分别调整到60、90 和120 帧,从而提高算法对于样本数据的识别难度。 对于帧数越高的样本数据图像, 算法识别出急停起跳动作的延迟时间也需要延长。 最后通过对比不同算法的识别延迟, 比较不同方法对于急停起跳动作的实际识别性能。
2.3 识别效率对比结果
实验选取的对比指标为急停起跳动作的识别效率,具体衡量指标为动作识别延迟,延迟越低代表识别方法的识别效率越高。 具体识别结果如下图所示。
根据实验结果可以看出, 随着图像帧数的不断增加,动作识别方法的识别延迟明显增加。通过观察动作识别延迟曲线可以明显看出,基于SIFT 算法的排球运动员急停起跳动作识别方法的识别延迟明显低于2 种常规的识别方法,且识别延迟曲线变化较为平缓,未出现较大浮动的波动。 可以证明提出的动作识别方法在识别效率上具备更大的优势。
3 结束语
对于排球运动员来说, 掌握准确的起跳技术和动作是至关重要的,它直接影响到发力和攻击的效果。为了提高排球运动员急停起跳动作识别效率, 提出了基于SIFT 算法的排球运动员急停起跳动作识别方法。膨胀操作处理图像边界点, 提取排球运动员急停起跳动作区域。构建人体有向时空骨架图,基于SIFT 算法,提取排球运动员急停起跳动作特征, 通过平滑处理动作轮廓波域,识别排球运动员急停起跳动作。实验结果表明, 提出的方法能够有效提高排球运动员急停起跳动作识别效率。
猜你喜欢
上海人大月刊(2022年4期)2022-04-14
学校教育研究(2022年2期)2022-03-22
作文通讯·初中版(2022年2期)2022-02-05
装备制造技术(2020年1期)2020-12-25
人大建设(2020年5期)2020-09-25
人大建设(2020年5期)2020-09-25
武术研究(2020年2期)2020-04-21
甘肃教育(2020年22期)2020-04-13
制造技术与机床(2019年11期)2019-12-04
当代教育理论与实践(2015年9期)2015-12-16