
联合哨兵卫星系列雷达与光学影像的洞庭湖水域面积变化高时空分辨率监测
2024-01-01 13:32宋利娟景海涛徐嘉慧陈探张大鹏宋春桥
遥感学报 2023年11期
宋利娟,景海涛,徐嘉慧,陈探,张大鹏,宋春桥
1.河南理工大学 测绘与国土信息工程学院,焦作 454000;
2.中国科学院南京地理与湖泊研究所 流域地理学重点实验室,南京 210008
1 引言
湖泊是淡水资源的重要组成部分,在调节河川径流、提供生活水源和维持生态平衡等方面发挥作用(宋春桥 等,2020;Wang 等,2014;马荣华 等,2011;王桥,2021)。近年来,在全球气候变暖和人类活动不断增强的共同影响下,大多数湖泊都呈现不同程度的扩张或萎缩(Pekel 等,2016;Cai 等,2016;杨桂山 等,2010;谭志强等,2017)。对湖泊进行高时空分辨率制图和动态监测,对于管理区域水资源和理解湖泊水文与气候变化的关系具有重要意义。目前,可获取的遥感卫星种类和数量不断增加,遥感监测已经成为地表水变化监测的重要技术手段。与传统的实地测量相比较,遥感技术具有成本低、范围广和更新快的优势(Yang 等,2017;高耶 等,2019;岩腊 等,2020)。
作为中国第二大淡水湖泊,洞庭湖是长江中游重要的调蓄湖泊,在调节长江径流、保持生物多样性和发展区域经济等方面具有举足轻重的作用(Yang 等,2021;Li 等,2018)。洞庭湖流域降水的季节变化十分显著,使得湖区的水体动态变化周期明显、幅度较大(杜涛 等,2012;李景刚等,2009;谢文君 等,2017;Wang 等,2022)。目前,大量研究利用MODIS 影像和Landsat 影像开展洞庭湖水体变化的遥感监测,由于光学影像易受到恶劣天气影响,导致可用影像数量减少,大多数研究集中在长时序的年际或月度水域面积变化研究。例如,李景刚等(2010)利用MODIS 数据产品对2000 年3 月—2008 年12 月间洞庭湖区水域面积的变化特征和趋势进行了监测和分析;成功等(2015)使用监督分类方法从Landsat 影像中提取1996 年—2014 年洞庭湖主要水域面积信息,结合该区域的气候和经济发展对水域面积变化的影响进行探讨。上述研究为深入了解洞庭湖水文动态做出了重要贡献。然而,由于MODIS 影像空间分辨率较低,为250 m,存在混合像元的影响,导致水体提取精度偏低;Landsat 影像具有30 m 的空间分辨率,但是时间分辨率较低,且容易受到云雾雨雪等恶劣天气的影响,无法用于监测洞庭湖水体的年内及月内动态变化(Li等,2021;Yang等,2020;王诗蕾 等,2021;余姝辰 等,2019;张猛 等,2017)。Sentinel-1 雷达卫星全天候、全天时不间断运行,不易受到天气和云层的影响,便于连续监测湖泊水域范围,特别是对于属于季风气候区的洞庭湖。已有研究利用Sentinel-1 影像对洞庭湖进行水域面积变化监测,例如:李军等(2020)选择2017年6月4日、6月28日、7月10日以及7 月22 日等4 期Sentinel-1 影像,对洞庭湖区域进行了洪涝灾害信息的提取与分析;Xing 等(2018)使用Sentinel-1 影像生成10 m 分辨率的2016 年洞庭湖月度地表水范围,分析了年内地表水动态;Zhu 等(2019)利用Sentinel-1 影像提取水体范围,分析了2015 年6 月—2019 年3 月洞庭湖水域月度面积变化。这些探索性研究多是对洞庭湖进行多时相或者月尺度水域面积变化分析,但未能在较长时间序列中捕获月内水域范围动态变化的细节信息。因此,本研究拟利用哨兵系列卫星的多传感器特征,集成雷达与光学影像各自的优势,构建10 m 分辨率的更高时频湖泊水域面积变化的遥感监测方案,深入了解洞庭湖水域面积变化情况。
因此,本研究的主要目标如下:(1)基于高时空分辨率的Sentinel-1影像构建2017年—2020年洞庭湖水体淹没面积的密集时间序列;(2)提出一种通过利用某个区块面积与Sentinel-1 全幅影像提取的湖泊面积的统计拟合关系建立经验模型重建完整湖泊面积的方法,从而加密湖泊水体面积时间序列;(3)联合完整提取的Sentinel-1/2 面积和借助区块拟合的Sentinel-1/2 面积数据,重建湖泊水域面积密集时间序列,开展洞庭湖2017 年—2020 年时段的年内和年际水体变化的精细分析。本研究旨在利用有效的遥感数据重建高时空分辨率湖泊水域面积变化时间序列,增进对洞庭湖水文状况的科学理解。
2 研究区概况与数据源
2.1 研究区概况
洞庭湖(112°06′ E—113°09′ E,28°42′ N—29°32′ N)位于长江中游荆江段南岸,是目前与长江依旧保持自然连通的两大湖泊之一,由东、西、南洞庭湖3 个湖区组成(图1)。洞庭湖北面以松滋、太平、藕池(三口)分泄长江水入湖,西南面承纳湘、资、沅、澧(四水)及汨罗江等小支流。该湖泊经治理和调蓄后,由城陵矶分泄湖水排入长江。洞庭湖区的年平均气温16.8 ℃,月平均气温5.8℃—27.3 ℃(黄菊梅 等,2013)。受亚热带季风气候的影响,洞庭湖面积季节性变化十分显著,水域面积在7—8 月最大,在11 月—次年2 月为最小(王威 等,2020;Yang 等,2020)。自2003 年三峡大坝运行以来,洞庭湖的水文特征发生了巨大的变化,调节江河径流和蓄水防洪的能力正不断减弱。为了更加全面地了解洞庭湖的变化规律,对洞庭湖的湖区面积进行更高时间、空间分辨率遥感监测具有十分重要的意义。
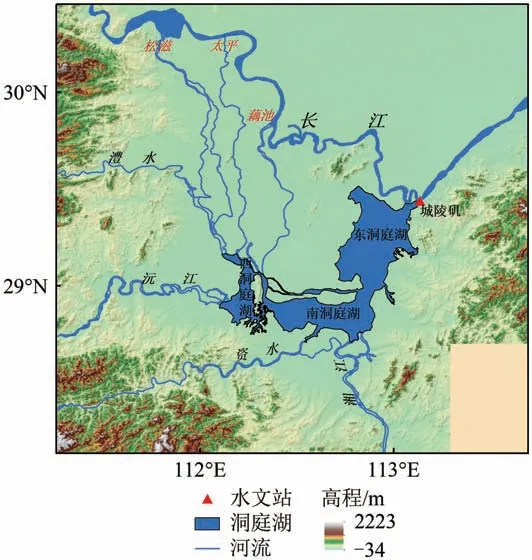
图1 研究区概况图Fig.1 Overview map of the study area
2.2 数据源
GEE(Google Earth Engine)云平台具有庞大的遥感影像数据集和高性能的计算能力,为快速地进行遥感数据分析提供了一种新途径(Gorelick等,2017;Tamiminia等,2020)。本研究采用集成在GEE 数据库中的Sentinel-1 雷达影像,Sentinel-2和Landsat 8 光学影像作为研究数据,进行洞庭湖水域面积的提取和重建。2017 年—2020 年的Sentinel-1、Sentinel-2和Landsat 8卫星的影像数量和良好的观测数量如表1所示。

表1 Sentinel-1、Sentinel-2和Landsat 8的影像信息和数量统计Table 1 Image information and number statistics of Sentinel-1,Sentinel-2 and Landsat 8
Sentinel-1由2014年4月3日发射的Sentinel-1A和2016 年4 月25 日发射的Sentinel-1B 两颗卫星系统组成,属于主动式微波遥感卫星(Torres 等,2012;Li 等,2018)。单颗卫星重访周期为12 d,两个卫星互补的重访周期为6 d,空间分辨率为10 m×10 m。Sentinel-1 携带C 波段合成孔径雷达SAR(Synthetic Aperture Radar),提供VV和VH两种极化方式。已有地表水提取研究表明,VV 极化用于水体提取具有更精确的结果(Twele 等,2016;Markert 等,2020)。因此,本研究仅采用VV 极化数据进行水域范围提取。Sentinel-1 覆盖洞庭湖的影像可分为两种类型:一种是完全覆盖洞庭湖的Sentinel-1 影像(简称为Sentinel-1 F),用于提取整个湖区的面积,时间分辨率多为12 d,由于存在影像缺失的情况,导致某些观测日期间隔>12 d;另一种是部分覆盖洞庭湖的Sentinel-1 影像(简称为Sentinel-1 P),不能应用于洞庭湖区域水体变化的研究,但是可以用于提取洞庭湖的部分区域的水体面积。Sentinel-1 F 和Sentinel-1 P 在洞庭湖的覆盖情况如图2(b)—(c)所示。
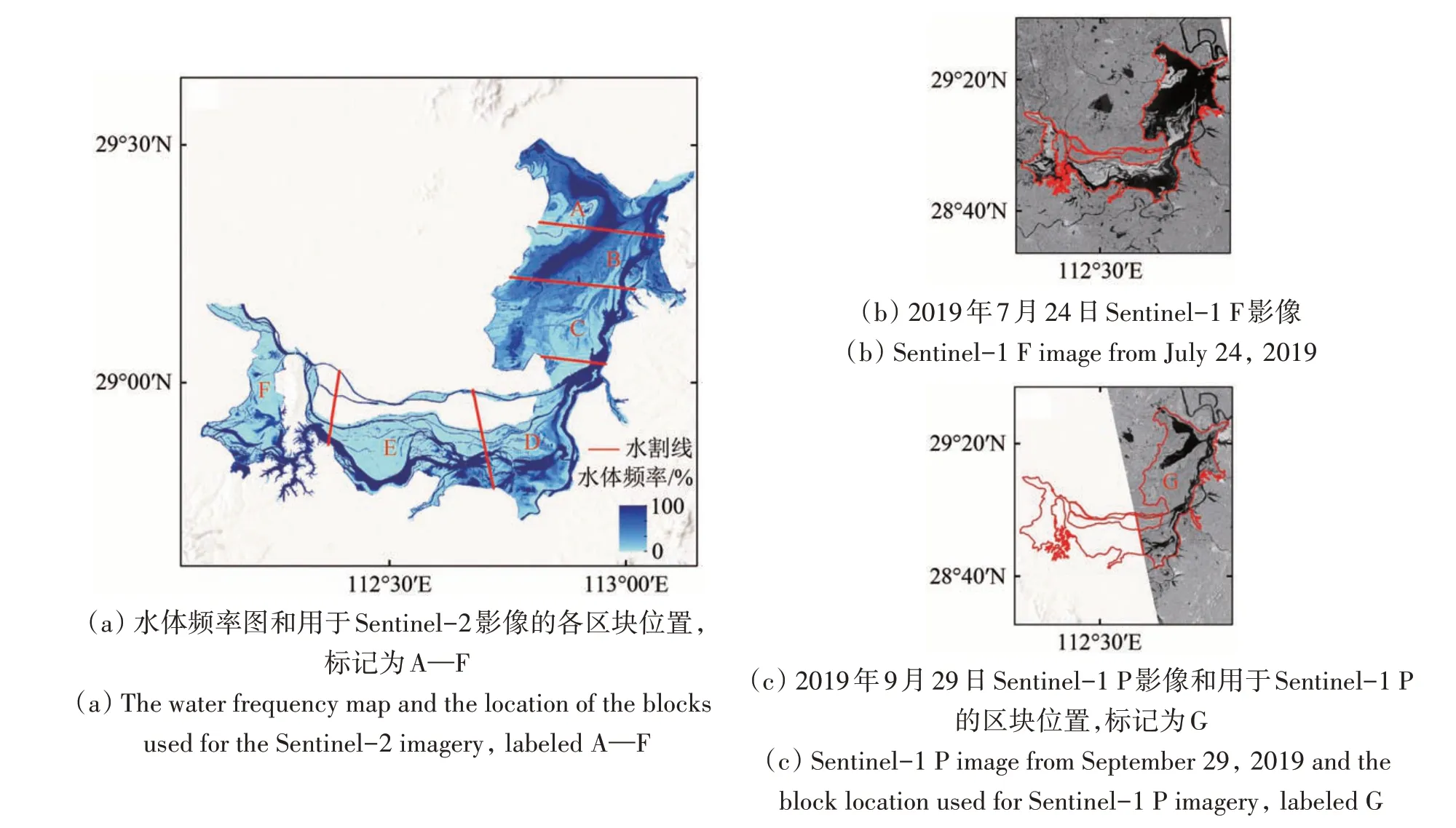
图2 用于Sentinel-1/2影像面积重建的洞庭湖各区块位置Fig.2 Location of each block for the area reconstruction of the Sentinel-1/2 image in Dongting Lake
Sentinel-2由2015年6月23日发射的Sentinel-2A和2017年3月7日发射的Sentinel-2B两颗卫星系统组成(European Space Agency,2015;Drusch 等,2012)。每颗Sentinel-2卫星都搭载一个多光谱成像仪MSI(Multi-Spectral Instrument),可提供13 个光谱波段,波长范围440—2200 nm(Vuolo 等,2016)。一颗卫星时间分辨率为10 d,两颗卫星组合后可以形成5 d 的重访周期,包含10 m、20 m和60 m 等3 种不同的地面空间分辨率。本研究选取Sentinel-2 影像内空间分辨率均为10 m 的B3(Green)和B8(NIR)波段进行水域范围提取。一景Sentinel-2 影像可以将洞庭湖完全覆盖,但是光学影像容易受到云雨等恶劣天气的影响,导致可用影像数量较少。
Landsat 8 是在2013 年2 月11 号发射成功的地球观测卫星,是Landsat 系列的第八颗卫星(Wulder 等,2019)。Landsat 8 卫星携带陆地成像仪OLI(Operational Land Imager)和热红外传感器TIRS(Thermal Infrared Sensor),卫星重访周期为16 d。OLI 包括9 个波段(B1—B9),其中有一个全色波段B8(15 m),其他波段空间分辨率为30 m;TIRS包括两个100 m的TIR波段(B10—B11)(Loveland 和Irons,2016)。本研究选取Landsat 8影像中分辨率均为30 m的B3(Green)和B5(NIR)波段进行水域范围提取。由于洞庭湖水域范围沿经向跨越多景Landsat 8 影像,因此无法获取同一天内覆盖洞庭湖全区的观测影像。将Landsat 8轨道号(Path/Row)为123/40和124/40的两景影像镶嵌才可以完整覆盖洞庭湖,但这两景影像获取时间间隔最少为16 d。本研究使用Landsat 8 影像主要是为了联合Sentinel-1、Sentinel-2和Landsat 8等构建卫星虚拟星座进行湖泊水体密集时间序列变化观测的讨论,故而关于Landsat 8 影像的重建湖泊面积的内容仅在5.2节的讨论中出现。
3 研究方法
3.1 基于Sentinel-1雷达影像提取水域面积
在Sentinel-1 雷达影像中,由于水体反射率更弱,水体呈黑色或颜色较暗区别于非水域。为了提高非水体和水体的差异,将SAR 影像的灰度值数据转换成以dB 为单位的后向散射系数(陈赛楠和蒋弥,2021;Li 等,2020)。接着,根据日期和研究范围筛选影像之后,采用7×7像素的Gamma—Map滤波窗口来降低散斑噪声并保留图像边缘信息。该滤波方法已经可以通过GEE 云平台实现。对于VV 极化图像,后向散射系数<-18—15 dB 或更低的像素被认为是水体(Markert等,2020;Manjusree等,2012)。SAR 影像中地物的灰度值和邻域的散射特征有关,易受水中植被的影响,后向反射信息混杂。Edge Otsu 算法是为每个场景生成唯一阈值的理论,最初由Donchyts 等(2016)提出。该算法采用Canny Edge filter 强调元素索引,提取图像的边缘特征,进行地物之间的分类(Setiawan等,2017)。为了更加准确的提取每一景Sentinel-1影像中的水体范围,本研究采用Edge Otsu 算法计算自适应阈值提取水体。
3.2 基于Sentinel-2 和Landsat 8 光学影像提取水域面积
本研究采用McFeeters(1996)提出的应用范围较广的归一化差异水体指数(NDWI)提取洞庭湖水域范围,NDWI 表达式如式(1)所示。通过水体反射率最大的绿色波段和水体反射率最小的近红外波段之间的比值,有效增强了非水体和水体像元之间的差异。通常情况下,NDWI提取水体像素选择0 作为分割阈值(NDWI>0 为水体,NDWI<0 为非水体),但是由于地物类型复杂,水体和其他地物之间的分割阈值不稳定,实际应用中需要根据情况对阈值做出调整。因此,本研究采用3.1节中提到的Edge Otsu算法计算水体提取的自适应阈值,更准确地提取出水体范围。具体计算公式如下:
式中,ρGreen为光学影像在绿光波段的反射率,ρNIR为光学影像在近红外波段的反射率。
3.3 联合Sentinel-1/2影像重建更密集的湖泊水域面积时间序列
经过洞庭湖的Sentinel-1 F 和Sentinel-1 P 影像数量相近,但Sentinel-1 P 影像不能完整覆盖洞庭湖,导致无法对洞庭湖的水体动态变化进行密集监测。而Sentinel-2 光学影像容易受到云、云阴影或冰的影响,这导致在整个洞庭湖区域完成湖泊水体的提取是具有挑战的。为了充分利用Sentinel-1/2 的清晰影像估算完整湖泊面积,本研究提出了一种根据湖面局部区块面积和全湖总面积之间的拟合关系的方法,以重建洞庭湖区域Sentinel-1 P 影像和部分云遮盖影响的Sentinel-2影像对应监测日期的完整湖泊面积。该方法分为4 个步骤,具体如下:首先,对2017 年—2020 年Sentinel-1 F影像提取的水体淹没范围(栅格类型)进行叠加计算,生成洞庭湖水体频率图。其次,对于Sentinel-1 P 影像,将其覆盖范围作为局部区块提取面积(图2(c));对于Sentinel-2影像,根据水体频率图和湖区(东、南、西洞庭湖)分布特征,将洞庭湖划分为6个区块,用于提取Sentinel-2清晰影像对应的水域面积,各区块位置如图2(a)所示。再次,基于Sentinel-1 F 影像提取的湖泊区块面积和总面积构建统计拟合模型。拟合曲线为一次线性函数和二次多项式函数两种形式。最后,结合从部分可用的Sentinel-1/2 影像中提取的区块面积和回归拟合模型,重建与该区块观测时间对应的完整湖泊面积数据。当Sentinel-1和Sentinel-2影像出现在同一天时,面积数据保留的顺序为Sentinel-1提取的淹没面积(Sentinel-1 F)>Sentinel-2提取的淹没面积(Sentinel-2 F)>Sentinel-1 区块面积重建的淹没面积(Sentinel-1 P)>Sentinel-2区块面积重建的淹没面积(Sentinel-2 P)。最后,将所有基于Sentinel-1和Sentinel-2提取的淹没面积和拟合面积进行联合,构建洞庭湖密集面积时间序列。
由于不同区块与总湖泊面积呈现出不同的拟合关系,本研究在进行区块拟合时的判断标准是优先保留R2值大的区块对应的拟合结果。如果遇到R2值相同的情况,则优先保留由一次线性函数模型拟合的湖泊面积结果。另外,对于Sentinel-2影像来说,需要注意的划分原则如下:(1)每个区块中应充分包含水体频率介于0—100%的所有像元,以便更好地表征局部湖区与全湖水体淹没范围联动变化特征;(2)每个局部区块的大小应该至少占湖泊总面积的10%,因为如果区块过大,仍然会导致获取无云遮盖区块Sentinel-2 影像较难,而如果范围设置过小,区块面积难以客观刻画随整个湖区水域面积变化而变化的信息,统计拟合模型可用性降低。在本研究中,区块A、B 和C 位于东洞庭湖,D 和E(形似河流的区域不包括在E 区块内)位于南洞庭湖,F 位于西洞庭湖,分别占湖泊总面积的14%、15%、18%、18%和17%。G区块位于Sentinel-1 P覆盖的洞庭湖区域,占湖泊总面积的64%。
3.4 精度评定
为验证Sentinel-1和Landsat 8影像的分类精度,通过目视解译将Sentinel-2 影像提取的湖泊水体范围作为地面真实的对比数据。由分类图的交叉对照样本数和参考数据组成的混淆矩阵,最常用来证明分类的准确性(Steinhausen 等,2018)。本研究创建二分类混淆矩阵,选取4个归一化系数进行水体提取精度评估,分别为生产者精度(PA)、用户精度(UA)、总体分类精度(OA)和Kappa系数。
4 结果与分析
4.1 基于Sentinel-1 影像的洞庭湖水体面积时间序列变化特征
基于Sentinel-1影像的2017年—2020年洞庭湖的水域面积变化具有明显的年内和年际特征,如图3所示。可见:4—9月为丰水期,10月—次年3月为枯水期,水域面积在646.15—2264.09 km2波动;由于季风气候的影响,7 月洞庭湖的水域面积明显扩大;湖泊水域面积变化也存在明显的年际波动,2017年和2020年的水域面积较大,2018年和2019年的水域面积较小。利用10 m分辨率的Sentinel-1影像提取的湖泊水体,能够尽可能地提取出湖区的细小水体,对水域范围的刻画更加精确。观测到的最小水域面积是在2017年12月25日(图3(b))。可见,仅通过几个狭窄弯曲的河道连接着湖泊。最大的水域面积出现在2020年7月30日(图3(c))。可见,重新连接了所有的洪泛区,形成了一个水面连续的大湖。最大水域面积与最小水域面积之比为3.50。12 d 后,面积扩张最快的为369.23 km2,从2018年6月23日的955.77 km2到2018年7月5日的1325.00 km2,变化率达到39.63%;面积下降最快的是439.83 km2,从2019年8月29日的1175.10 km2到2019年9月10日的735.27 km2,变化率达到59.82%。这些监测结果能够更清晰地解释洞庭湖的动态变化,为快速水文监测的应用提供了参考。
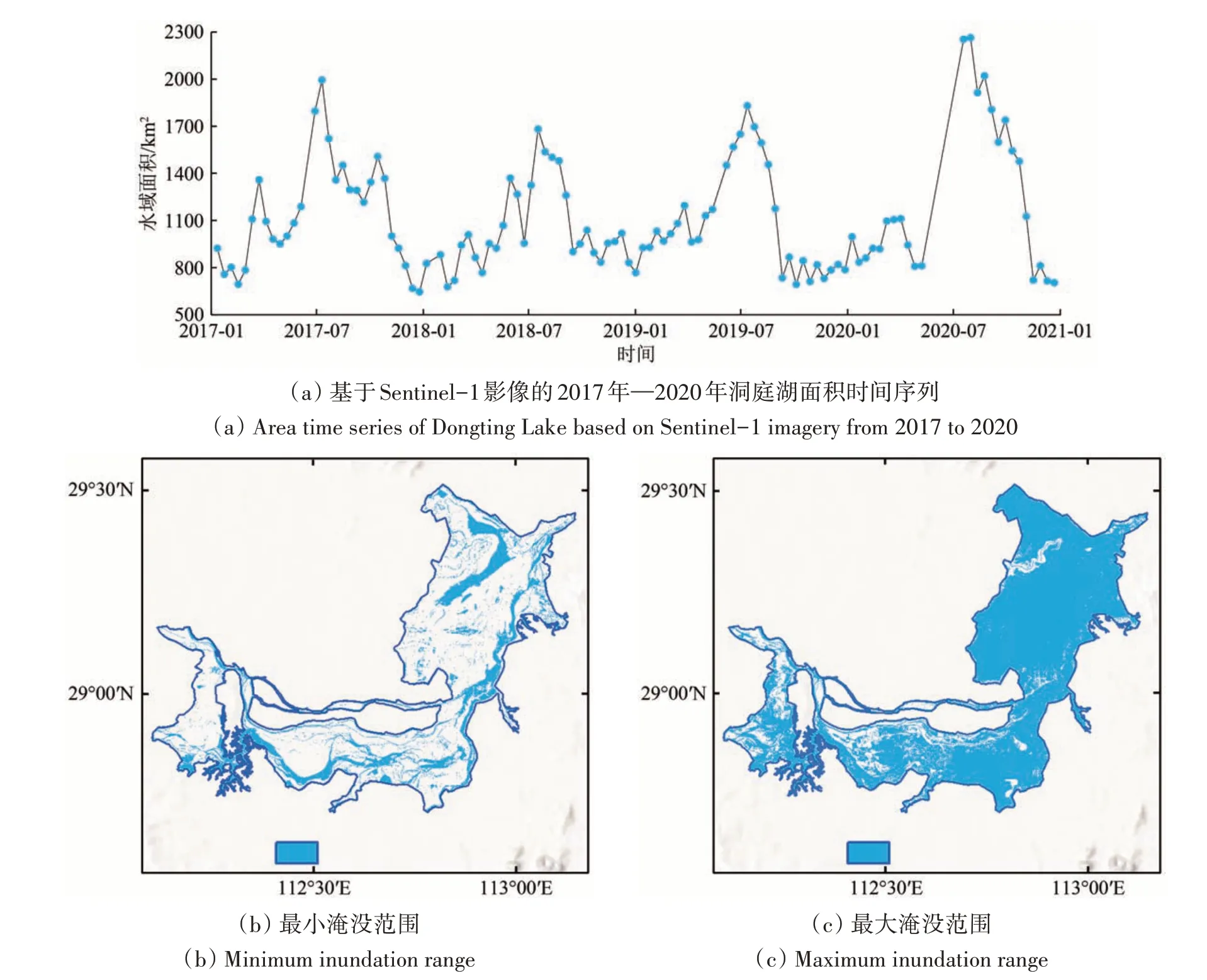
图3 基于Sentinel-1影像的2017年—2020年洞庭湖水体淹没面积时间序列Fig.3 Time series of inundation area in Dongting Lake based on Sentinel-1 images from 2017 to 2020
4.2 联合Sentinel-1/2影像的密集湖泊面积时间序列重建分析
基于洞庭湖区域Sentinel-1 构建的水体频率图和湖区分布特征,用于重建部分清晰Sentinel-1/2影像对应洞庭湖区域的各区块位置和大小如图2所示。各区块面积与总面积的拟合曲线呈显著正相关关系(P<0.01),区块A、B、C、D、E、F、G的拟合R2值分别为0.97、0.96、0.96、0.98、0.89、0.81、0.99(图4)。拟合曲线包括两种类型,即线性函数(C,D,G)和二次多项式函数(A,B,E,F)。对于用于Sentinel-2 影像的各区块来说,F区块与总面积的相关性较弱,这可能主要是由于西洞庭湖永久水面积所占比例较小,大部分拟合点聚集在图4(F)的左下角;D 区块主要包含连接东洞庭湖和南洞庭湖的河道,始终处于永久水所占比例较大的状态,与总面积的拟合系数R2值最高,为0.98。各区块的平均R2值为0.94,表明所提出的区块拟合方法能够较好地重建洞庭湖的完整水域面积时间序列。
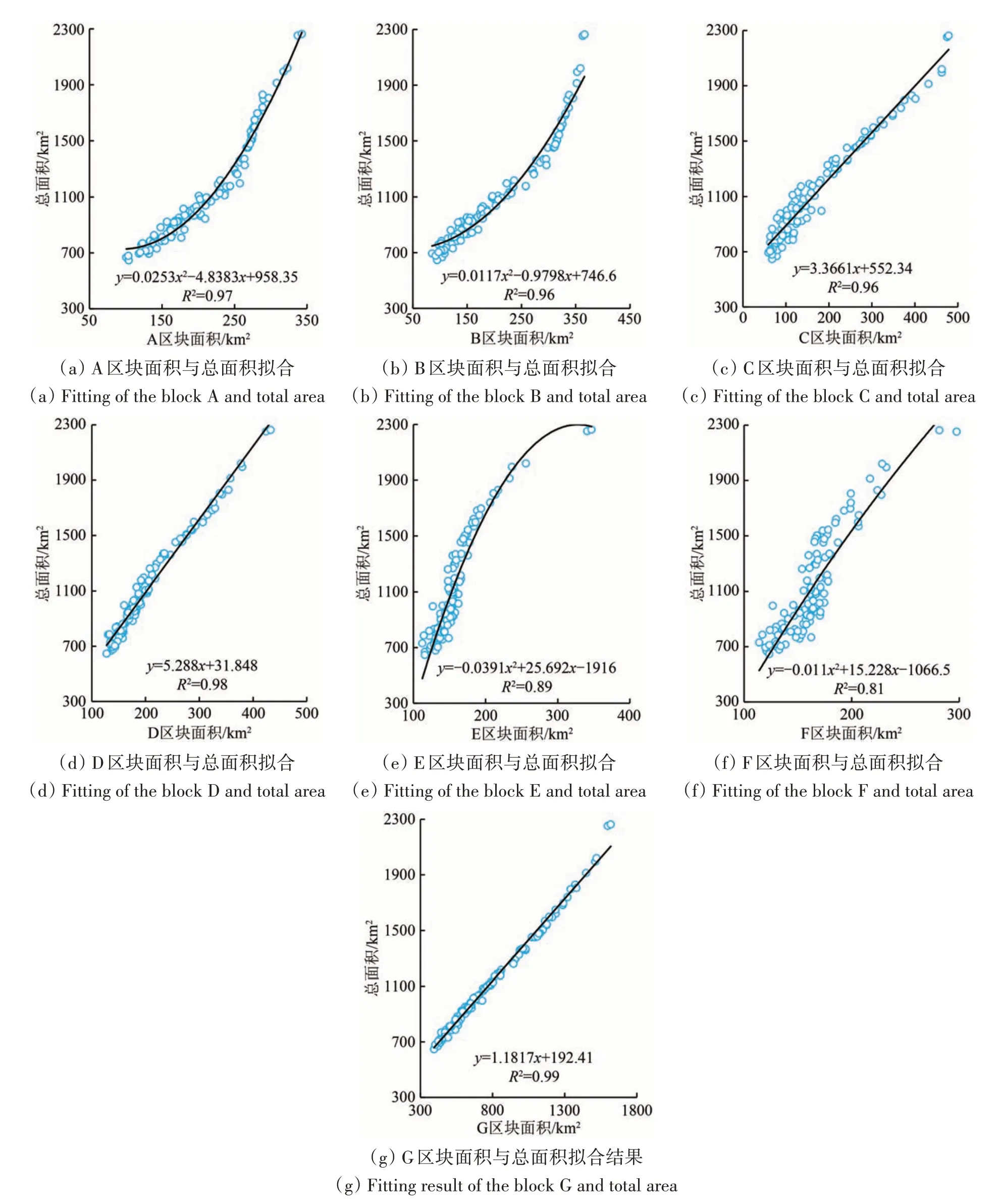
图4 用于重建部分可用Sentinel-1/2影像对应洞庭湖面积的每个区块面积和湖泊总面积的7条拟合曲线Fig.4 Seven fitting curves of the block and total lake area corresponding to the area reconstruction of Dongting Lake for partial clear Sentinel-1/2 image
在本研究中,119 景Sentinel-1 影像和38 景Sentinel-2 影像用于提取区块面积借助由拟合关系建立的经验模型重建湖泊完整面积。此外,在2017 年—2020 年,38 景Sentinel-2 影像可用于提取洞庭湖完整面积。虽然Sentinel-2 影像数量较少,但面积时间序列的变化趋势与Sentinel-1 影像相同。因此,Sentinel-1 和Sentinel-2 影像可以结合,对洞庭湖进行更深入的观测。将完全提取的湖泊面积与借助区块拟合的面积数据相结合,构建基于Sentinel-1/2 的水域面积密集时间序列,详见图5。加密后,一个月内可用观测影像平均有6 景,一个月观测次数最多有10 景,时间间隔为3—6 d。一个月内洞庭湖地表水域面积也是相当剧烈,如图5(b)所示。可见:一个月内最大面积与最小面积的平均比率为1.36;地表水域最剧烈的波动发生在11 月,比率为1.52。此外,地表水月均面积7 月最大为1874.68 km2,12 月最小为745.23 km2。2017年—2020年洞庭湖平均水域面积为1147.13 km2。与4.1 节基于Sentinel-1 影像提取的洞庭湖水体面积变化相比,充分利用所有可用Sentinel-1 和Sentinel-2 影像提取的水体面积变化可将水体观测的时间分辨率由12 d 提高到3—6 d。洞庭湖具有高频波动的特点,密集时间序列的构建对于水资源管理具有深远的意义。
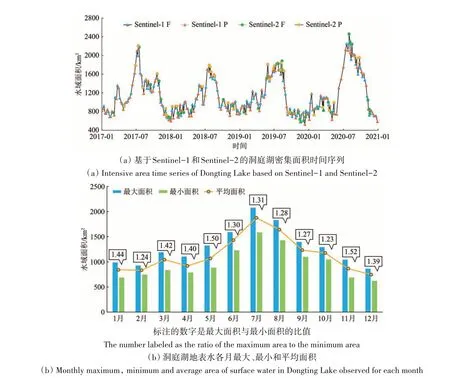
图5 结合所有可用Sentinel-1/2影像的2017年—2020年洞庭湖水域面积密集时间序列Fig.5 Density time series of water area in Dongting Lake combined with all available Sentinel-1/2 images from 2017 to 2020
4.3 洞庭湖季节性空间分布变化特征分析
基于Sentinel-1影像的2017年—2020年洞庭湖各月水体淹没频率变化,如图6所示。由图6可知,洞庭湖的水域面积存在明显的年内变化。6—8 月处于丰水期,东、西、南洞庭湖相互连接,形成一个连续的湖面,而在枯水期12 月—次年2 月只有几条细窄的河道和东洞庭湖的“钳形”湖泊。各月水体淹没频率变化的主要特征是从湖区中心河道到两侧水体淹没频率逐渐减小,湖区内深蓝色是年内永久水域(包括流入湖中的河流支流和湖泊的稳定部分),白色区域是年内非水域,其他区域颜色由浅蓝到深蓝属于季节性水域。永久水域面积为580.50 km2,占洞庭湖总面积的21.29%;非水域面积占比最小,面积为246.56 km2;季节性水域面积占比最大,面积为1899.94 km2。永久水域和非水域在年内不会发生水陆性质变化,洪水风险较低;而季节性水域淹没风险较高,应提前做好防洪准备。此外,洞庭湖水域变化特征表现出明显的区域差异,季节性水域变化大多发生在东和南洞庭湖,西洞庭水域空间范围相对稳定。
5 讨论
5.1 洞庭湖面积提取结果的精度验证
在洞庭湖区域内生成1000 个随机样本点,利用相同或相近观测日期的Sentinel-2 光学影像人工解译结果对基于Sentinel-1 和Landsat 8 影像提取的水体结果进行精度验证。选取10 幅影像进行验证(5 幅Sentinel-1 影像和5 幅Landsat 8 影像),定量精度评价结果如表2 所示。用于精度评估的Sentinel-1、Sentinel-2和Landsat 8影像之间的时间差≤2 d,可在一定程度上避免由于获取时间不一致导致的水体提取结果差异。对于Sentinel-1 的精度评价结果,平均PA 值和平均UA 值比较接近,分别为88.19%和89.75%。洞庭湖区域平均OA 值为94.04%,Kappa 系数为0.85。对于Landsat 8 的精度评价结果,平均PA 值和平均UA 值分别为83.67%和97.18%。洞庭湖区域平均OA 值为94.22%,Kappa 系数为0.86。水体提取的偏差主要发生在少数细小水体和陆地—水体边界处。OA 和Kappa 系数的高精度验证了动态地表水面积提取方法的可行性和有效性,说明基于Sentinel-1 和Landsat 8 影像提取的水体结果是理想的。

表2 混淆矩阵用于洞庭湖水体提取算法的精度评价Table 2 Accuracy evaluation of the confusion matrix applied to the water extraction algorithm in Dongting Lake
5.2 联合Landsat 8影像补充洞庭湖水域面积时序分析
光学遥感卫星容易受云雾天气的影响,尤其是洪水期间,无法获取完整覆盖洞庭湖区域的影像。由Sentinel-1、Sentinel-2 和Landsat 8 等卫星可以构成卫星虚拟星座,对洞庭湖区域进行密集时间序列观测。本研究为了讨论结合Landsat 8 影像进行洞庭湖面积时间序列加密观测的可行性,对2017年—2020年经过洞庭湖区域的Landsat 8影像进行筛选和部分区块水域面积计算,共有48 景Landsat 8 影像可以提取局部洞庭湖面积并用于重建完整湖泊面积。根据Landsat 8 在洞庭湖的分布规律和洞庭湖水体频率图,重新确定一个新的区块拟合模型用于Landsat 8 影像提取区块面积拟合完整湖泊面积,如图7(a)所示。将4.2 节构建的Sentinel-1/2 面积时间序列(蓝色)和Landsat 8 重建的面积时间序列(黄色)相结合,构建密集时间序列,如图7(c)所示。虽然Landsat 8(30 m)和Sentinel-1/2(10 m)的空间分辨率不同,但是其估算的水体面积变化趋势与Sentinel-1/2保持一致。与使用Landsat 系列卫星进行洞庭湖水域面积变化观测的研究相比,本研究使用的高时空分辨率的哨兵影像可以观测到洞庭湖月内水域面积的动态变化特征(王威 等,2020;Yang 等,2020;崔亮等,2015)。此外,Landsat 8影像与Sentinel-1/2影像分布日期不同,与Sentinel-1/2 结合进行密集时间序列的构建,可以更加详细地研究洞庭湖区域水体动态变化特征。与基于Sentinel-1和Sentinel-2影像提取的洞庭湖水体面积变化相比,结合Landsat 8 影像的水体面积变化可在某些月将水体观测的时间分辨率提高,但是对于水体面积的月内均值和年平均值变化影响不大。
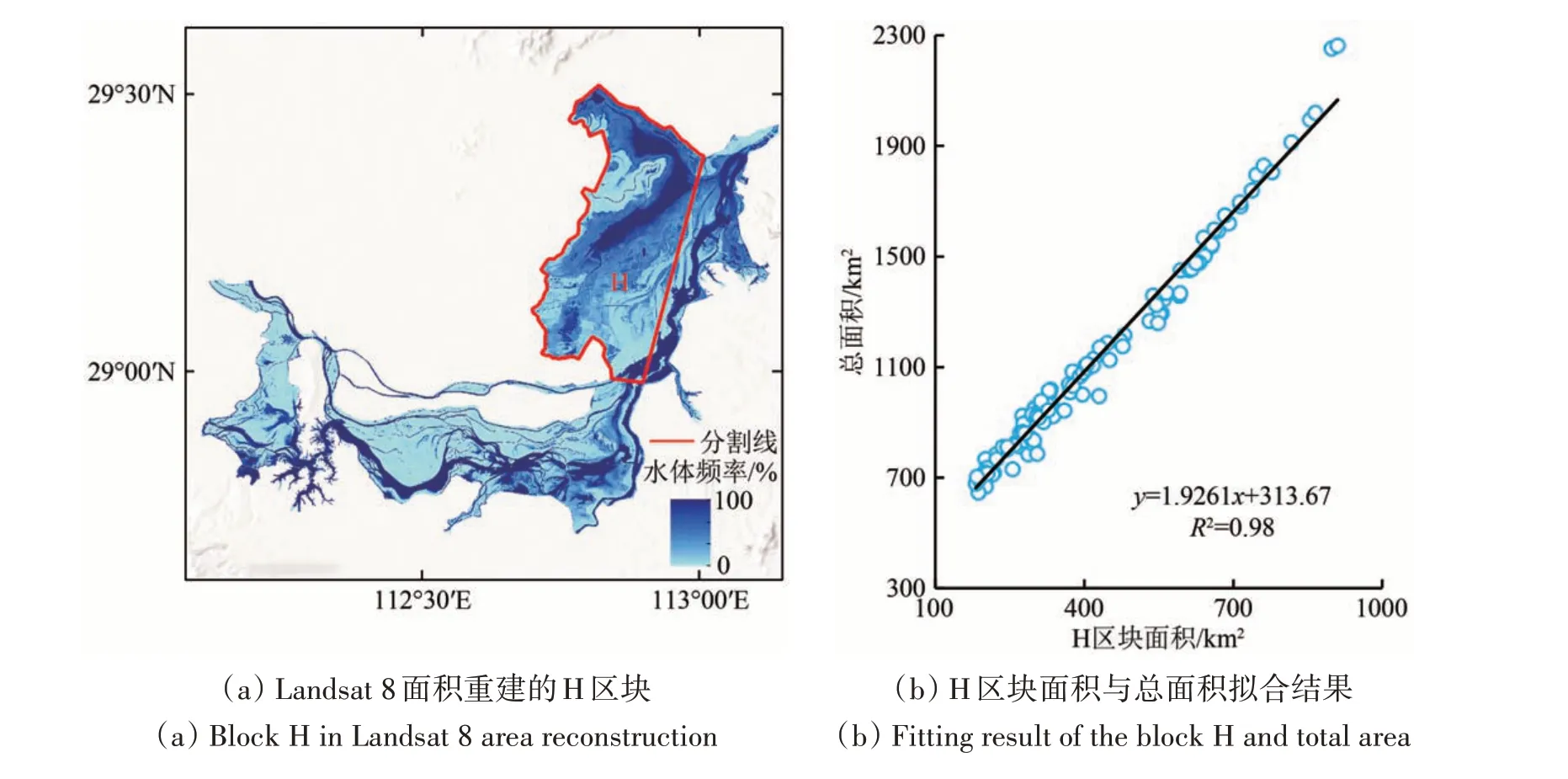
图7 联合Sentinel-1/2和Landsat 8的洞庭湖水域面积密集时间序列Fig.7 Intensive time series of Dongting Lake inundated area by joint Sentinel-1/2 and Landsat 8
Landsat 系列卫星是持续时间最长的对地球观测光学遥感卫星,对于湖泊水域面积变化的研究具有重要价值(Wulder等,2019)。已有研究表明,将Landsat 8、Sentinel-2A 和Sentinel-2B 结合可提供全球平均重访周期为2.9 d 的影像数据,开辟了高时空水体动态变化研究的可能性(Wulder 等,2019;Li和Roy,2017)。NASA/USGS Landsat 团队和ESA Sentinel-2团队成员合作证明了Landsat 8 OLI和Sentinel-2 MSI 影像提取各类地物提取结果在它们各自的不确定性范围内(Barsi等,2018;Pahlevan等,2018)。Landsat 9 卫星被放置在与Landsat 8卫星相差8 d 的轨道上,以增加观测的时间覆盖范围。随着2021年9月27日发射的Landsat 9的加入,构建的卫星虚拟星座将变得周期更短,提供接近2 d 时间间隔的影像。根据本研究提出的借助区块面积拟合湖泊完整水域面积的方法可以最大限度的利用雷达和光学遥感影像,为开展湖泊水体高时空监测提供可能。
6 结论
本研究首先基于高时空分辨率的Sentinel-1 SAR影像,构建了2017 年—2020 年洞庭湖水域面积密集时间序列,时间分辨率为12 d。为了提升洞庭湖水体面积动态变化监测频率,充分利用部分可用的Sentinel-1/2 影像,发展了一种借助湖泊局部区块面积重建完整湖区面积的方法。因此,联合Sentinel-1 和Sentinel-2 观测,为更精细地监测洞庭湖年内和年际水体变化特征。根据水体频率图划分的洞庭湖7个局部区块面积与整个湖泊总面积可获得良好的统计相关性,平均拟合R2为0.94。从2017年—2020年,共有119景Sentinel-1影像和38景Sentinel-2影像可用于提取洞庭湖区块完整水体淹没范围,从而重建整个湖区面积。通过联合Sentinel-1/2 的面积数据,研究区洞庭湖的月度可用观测影像平均为6 景,时间间隔为3—6 d,某些月高达10 余次监测,可以更为精细地刻画洞庭湖的水文动态。本研究构建了洞庭湖2017年—2020年高时空分辨率的水域淹没面积时间序列,结果表明在洞庭湖水域面积具有显著的季节性波动和年际变化。年尺度上,面积较大的是2017年和2020年,较小的是2018 年和2019 年;月尺度上,洞庭湖的丰水期为4 月至9 月,枯水期为10 月至次年3 月。水域面积在7 月达到峰值,11 月至2 月达到谷值。一个月内最大面积与最小面积的平均比率为1.36。地表水域最剧烈的波动发生在11 月,最大/最小比率为1.52。总之,2017 年—2020 年,洞庭湖的平均水域面积为1147.13 km2。与基于Sentinel-1/2影像构建的洞庭湖水体面积变化相比,结合Landsat 8影像的水体面积变化可在某些月可以将水体观测的时间分辨率提高,但是对于水体面积的月均值和年均值影响不大。
该研究为在缺乏完整影像数据的情况下,充分利用多源遥感数据重建兼具高空间分辨率与高时频信息的湖泊水域面积密集时间序列,提供一种有效途径。该方法能够更为精细地监测湖泊水体淹没范围的动态变化,未来研究将尝试拓展该方法应用到区域尺度湖泊水域面积变化遥感监测。
志 谢本研究使用的数据来源于Google Earth Engine平台,在此表示衷心的感谢!
猜你喜欢
小学生学习指导(低年级)(2021年10期)2021-11-01
水上消防(2020年5期)2020-12-14
金桥(2020年8期)2020-05-22
文史春秋(2019年11期)2020-01-15
少儿美术(快乐历史地理)(2019年4期)2019-08-27
智能城市(2018年7期)2018-07-10
阅读(低年级)(2018年4期)2018-05-14
小学阅读指南·低年级版(2017年2期)2017-03-23
音乐天地(音乐创作版)(2016年4期)2016-07-28
林业与生态(2016年3期)2016-02-27
