基于滑模控制器的压电执行器线性化控制研究
2024-01-02 11:16凌金成刘志强周振华周民瑞
压电与声光 2023年6期
凌金成,刘志强,2 ,周振华,2,周民瑞
(1. 长沙理工大学 汽车与机械工程学院,湖南 长沙 410114;2. 机械装备高性能智能制造关键技术湖南省重点实验室,湖南 长沙 410114)
0 引言
压电陶瓷具有纳米级分辨率、高精度[1]、大输出力[2]及宽带宽[3]等优点,被广泛应用于微定位[4]、微操作[5]和微组装的各种精密系统[6]的致动器中。但压电陶瓷具有严重的迟滞非线性现象[7],如果没有合适的控制方案,利用压电陶瓷驱动的精密系统,其精度和速度等性能会急剧下降。因此,建立最优的模型和控制方法,减小迟滞非线性,提高压电驱动平台的精度,一直是热门研究课题。
为了更好地描述非线性迟滞问题,实际应用中需要通过建立非线性模型和控制来提高控制精度。国内外学者主要在现象模型上做了大量的研究,因为现象模型是不考虑其工作原理,将迟滞曲线看成数学问题。现象建模得到广泛应用,其简单性和准确性使其在工程应用上具有物理建模所不具备的优势。一般现象模型根据数学模型不同分为微分类迟滞模型和积分类迟滞模型。常见的微分类模型有Duhem模型[8]、Dahl模型[9]、Bouc-Wen(B-W)模型[10]等,常见的积分模型有Prandtl-Ishlinski模 型[11]、Preisach模型[12]等。压电陶瓷运动时,不同频率下其迟滞非线性表现出率相关特性,因此在建模过程中需要加入率相关影响因子。文献[13-15]在频率相关迟滞模型方面进行了较多研究。在建立模型过程中,模型的参数辨识很重要,国内外学者主要通过改进基于最小二乘法、粒子群算法、神经网络算法、遗传算法、免疫算法和蚁群算法等来获取很好的参数,提高建模精度,更好地拟合非线性迟滞模型。在迟滞控制方面有前馈控制、反馈控制[16]及前馈反馈复合控制。前馈反馈复合控制是前馈和反馈控制方法相结合的控制方案,是目前应用最广的控制方法。前馈反馈复合控制一般通过逆模型前馈补偿快速减小迟滞误差,为减小开环逆补偿下各种扰动的影响,在逆模型基础上加入反馈控制,以实现前馈反馈复合控制。
综上分析,为更好地描述非线性迟滞问题,本研究基于传统的B-W模型[17],建立与Hammerstein结构相结合的模型。因为传统的B-W模型是利用一个具有迟滞形状参数的非线性微分方程来描述迟滞特性,根据选择不同迟滞形状的参数,可以得到各种形状的迟滞环,而且它只需要用一个辅助的非线性微分方程来描述迟滞行为,计算效率较高,逆模型求解也较方便。但该模型关于中心点严格对称,对于非对称迟滞特性的拟合精度有限,并且该模型未加入频率影响因子,达不到率相关效果,故需与Hammerstein结构[18]相结合加入一个二阶非线性系统,实现率相关。本研究在传统的B-W模型中加入二阶系统,利用粒子群算法辨识参数,在滑模反馈时利用卡尔曼做状态预估,实现前馈加滑模反馈复合控制。基于本研究提出的Hammerstein结构模型,对比研究了前馈补偿、前馈加比例、积分、微分(PID)控制反馈补偿、前馈加滑模控制反馈补偿3种控制方法的效果。
1 B-W率相关模型建立
1.1 传统B-W模型
传统 B-W模型是分别对线性分量和磁滞分量进行建模,表示为微分方程。经典的B-W模型(CBW)模型已广泛应用于具有迟滞特性的非线性系统中[19],在用于表征压电执行器(PEA)的迟滞非线性时,可采用迟滞算子和位移算子建立模型,具体形式为
Y(t)=KU(t)+H(t)
(1)
(2)

CBW模型涉及参数少,易建立逆模型,但是模型的参数未涉及频率相关,如果直接描述非线性迟滞模型,在不同频率激励输入时难以得到较高的拟合度,因此需加入率相关模型。
1.2 建立率相关的B-W模型
在驱动电压作用下压电陶瓷将产生迟滞,且迟滞的形状与输入信号的频率有关,这种率相关迟滞非线性特性严重影响压电陶瓷的应用。为了能准确描述压电陶瓷迟滞非线性,本研究采用Hammerstein模型结构(见图1)描述压电陶瓷驱动微定位平台的率相关迟滞特性。图1中,u为输入电压,H为迟滞模型,Y为CBW模型输出,G(s)为二阶系统,y为输出位移。Hammerstein模型是块连接结构的非线性模型,由一个静态非线性函数串联一个线性动态模块组成。静态非线性环节采用B-W迟滞模型描述,线性动态环节等效为一个二阶线性时不变系统。二阶系统动力学方程为
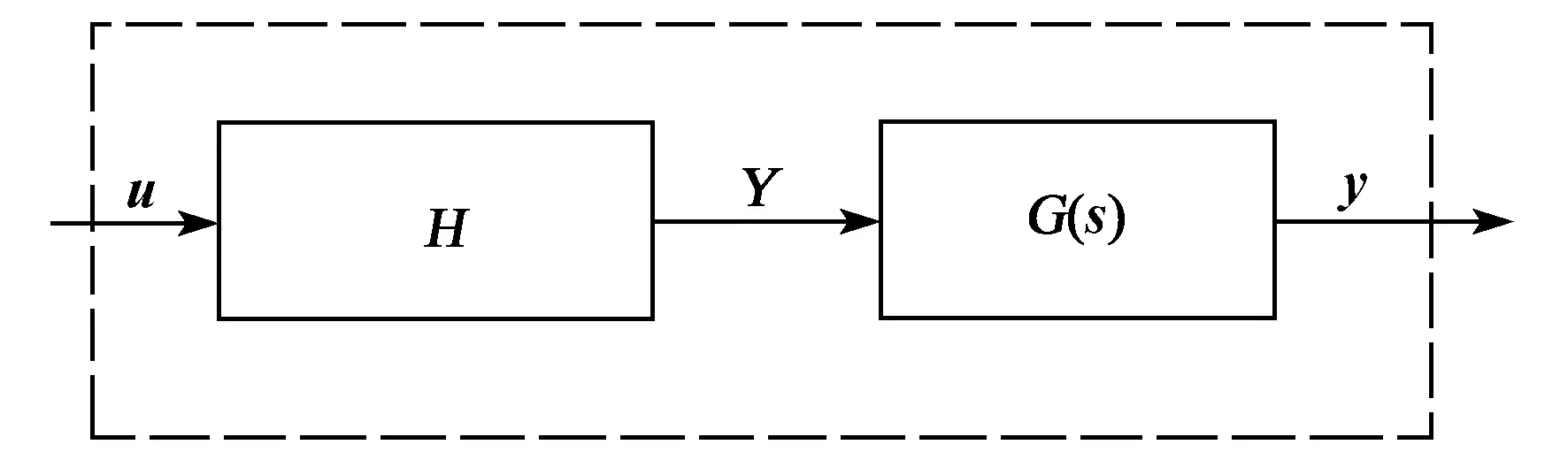
图1 Hammerstein-模型结构框图
(3)
Y(t)=KU(t)+H(t)
(4)
(5)
式中:M,B,K1分别为迟滞系统等效的质量、阻尼、刚度;Y(t)为CBW模型输出。加入二阶系统后能更好地描述迟滞模型非线性系统,具有较高的拟合度,实现率相关的跟踪。
2 迟滞非线性复合补偿控制器设计
本文采用迟滞前馈补偿与滑模控制反馈补偿复合控制策略,使用B-W逆模型对压电执行器的静态迟滞非线性进行补偿。滑模控制器先通过状态空间方程对ARX动态迟滞率相关模型进行描述,然后通过卡尔曼滤波器对动态率相关性的状态变量进行预测,再将预测的状态矩阵反馈到滑模控制器进行反馈补偿,形成一个前馈和反馈相结合的复合控制系统。
2.1 CBW逆模型的前馈补偿控制
前馈逆模型补偿控制能够通过期望位移来输入控制电压,可有效降低PEA的迟滞非线性[20],且迟滞模型的解析逆模型存在与否决定了逆模型前馈控制器设计和实现的难度。基于所提出的CBW模型和二阶系统设计逆模型,具体控制结构如图2所示。前馈控制器为
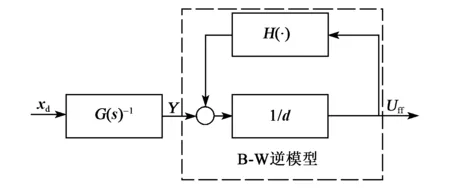
图2 逆控制模型
(6)
由于Uff(t)与H(t)不可同时获得,但在采样频率较高时有:
H(t)≈H(t-1)
(7)
因此逆模型前馈补偿为
(8)
(9)
式中:xd(t)为期望位移;Uff为前馈控制的输出电压;t为采样的顺序点。
2.2 卡尔曼观测器设计
实际应用中,误差的主要来源于建立描述迟滞特性的数学模型与压电陶瓷执行器实际输出的误差、压电陶瓷执行器工作过程中其他行为的影响以及外界的干扰与系统测量噪声的影响。前面两种误差主要为建模控制上的影响,外界干扰与系统测量噪声会直接影响反馈信号的准确度,为了减小外界干扰的误差影响,本文引入卡尔曼观测器对信号进行观测预估,提高了测量精度。
压电陶瓷执行器的迟滞率相关采用ARX模型描述,因此,在设计卡尔曼观测器中利用ARX模型进行离散化得到的状态空间矩阵方程为:
(10)
式中:A、B、C为ARX方程离散化的状态空间矩阵系数;xk为线性时不变系统的状态变量;uk为CBW模型的输出分量;yk为输出位移量。
本文使用离散卡尔曼预测得到的状态变量xk为
(11)
式中:w,v分别为过程噪声和测量噪声,都是为零均值不相关的高斯白噪声,在卡尔曼观测中方差分别用Q和R表示;uk为CBW模型的输出量;yK为测量的位移值。状态变量的推算公式如下:
(12)
式中:PK,DK分别为预测误差方差矩阵和预测误差方差更新矩阵;KK为卡尔曼增益矩阵;YK,XK分别为先验状态变量和估计状态变量。UK在为CBW模型的输出量;yK为测量的位移值。
2.3 S型滑模控制器设计
B-W模型的逆模型属于开环控制,抵抗外部干扰的能力差。本文设计了一种基于S型函数的滑模控制来消除剩余的滞后部分,提高控制器的鲁棒性,实现高信号跟踪精度。具体控制策略如图3所示。图中,r(t)为期望位移信号,X(t)为卡尔曼观测的状态矩阵,y(t)为执行器实际输出位移信号,Y(t)为CBW静态模型输出信号,Ufb为滑模控制输出的电压信号,Uff为逆模型输出的电压信号。X1、X2、X3分别为卡尔曼观测器输出的位移、速度、加速度值,X1、X2可由状态矩阵直接输出,根据二阶系统可得到X3=Y(t)-BX2-K1X1,r1、r2、r2分别为期望的位移、速度、加速度值。

图3 基于滑模控制策略模型
为了设计S型滑模控制器,定义误差函数为
(13)
为了减小控制器的稳态误差,定义积分滑动面为

(14)
式中λ为正常数。为控制效果更好,在控制规律函数上选择幂指数趋近律函数为控制函数:
(15)
式中η为增益ε(0<ε<1)的常数,其决定滑动面的收敛速度。
(16)
根据滑模规律可得:
(17)
将误差一阶导数替换,得到基于幂次趋近律的控制输出:
(18)
前馈加反馈控制可得总输出为
U=Uff+Ufb
(19)
为了证明控制系统的稳定性,定义李雅普诺夫函数V=s/2,其一阶导数为
-η|s|t+1≤0
(20)
根据李雅普诺夫定理可知,控制系统稳定。
3 模型仿真与分析
3.1 模型参数辨识与验证
根据前面的建模和压电陶瓷执行器[20]可知,传统的B-W模型(见式(1)、(2))需要利用智能算法对α、β、γ和K4个参数进行辨识,本文采用粒子群算法辨识上述4个参数的最优值。1995年,Eberhart和Kenndy提出了粒子群算法。粒子群算法(PSO)本质上是一种随机搜索算法,一种智能优化技术。该算法具有概念简明,参数设置少,易实现,精度高和收敛快等优点,已被广泛应用于优化问题和搜索问题中。具体的辨识步骤为:
1) 首先对压电执行器施加幅值为100 V,频率为1 Hz的正弦激励信号,并同步采集与激励信号对应的位移量[20-21]。
2) 在Matlab程序上设置PSO的迭代次数、粒子数量、粒子的初始速度将压电陶瓷执行器的实际位移与CBW模型输出位移的均方根误差作为算法停止条件。
根据上述步骤可辨识得到1 Hz单频激励的传统B-W模型参数,也称作率无关参数。本文研究辨识得到K=0.065 493 211 703 623,α=-0.032 622 992 806 397,β=0.029 945 089 706 869,γ=-0.052 690 344 204 044。将上述辨识得到的参数输入到CBW模型中,然后用1 Hz,的正弦信号激励得到的模型输出如图4所示。其中最大误差为0.290 87 μm,误差均方根为0.086 022 μm。
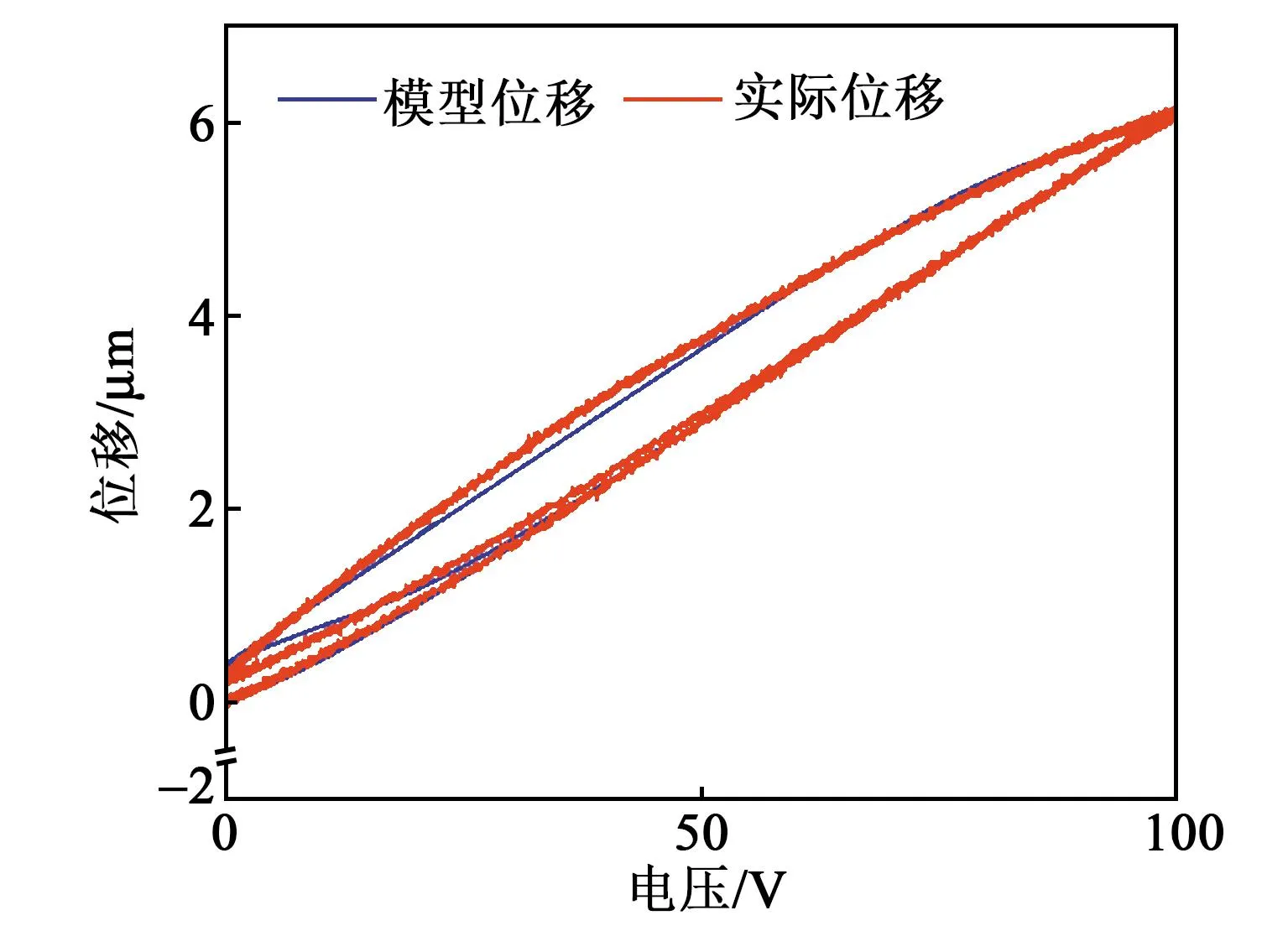
图4 1 Hz激励的模型位移与实际位移
由图4可看出,在1 Hz下跟踪效果较好,但随着频率改变,误差越来越大,因此需要加入Hammerstein结构模型,增强模型率相关跟踪,减小误差。Hammerstein结构模型跟踪步骤:
1) 首先将幅值为100 V、频率为0~100 Hz的扫频正弦电压作为激励输入传统B-W模型中,然后得到传统B-W模型输出。
2) 利用Matlab二阶系统参数辨识工具辨识参数,将传统B-W模型输出作为二阶系统的输入,将压电陶瓷执行器在0~100 Hz扫频激励下得到的实际位移作为二阶系统输出位移。辨识得到的二阶系统为
(21)
将辨识得到的二阶系统与传统B-W模型结合,然后进行验证,利用100 Hz的激励信号作为传统B-W模型的输入,得到实验数据进行验证,其中传统B-W模型的最大误差为 1.228 1 μm,误差均方根为0.654 95 μm。加入Hammerstein结构模型后,经误差分析可知,模型最大误差为0.419 95 μm,误差均方根为0.186 39 μm,跟踪误差减少了87.99%。因此,基于传统B-W模型的Hammerstein 结构模型能精确描述压电定位平台的迟滞非线性特性,具体跟踪效果如图5、6所示。

图5 迟滞模型的误差

图6 100 Hz下加入率相关系统轨迹对比
3.2 跟踪控制结果与分析
基于上面的参数辨识和模型设计,在Matlab程序中设计好控制器,仿真分析中,设计了前馈控制、前馈PID反馈控制,并与本研究设计的前馈滑模控制进行对比。仿真过程中分别输入幅值为6 μm、不同频率的正弦信号作为期望信号,再与模型输出的仿真轨迹进行对比,其跟踪效果与误差如图7-14所示。
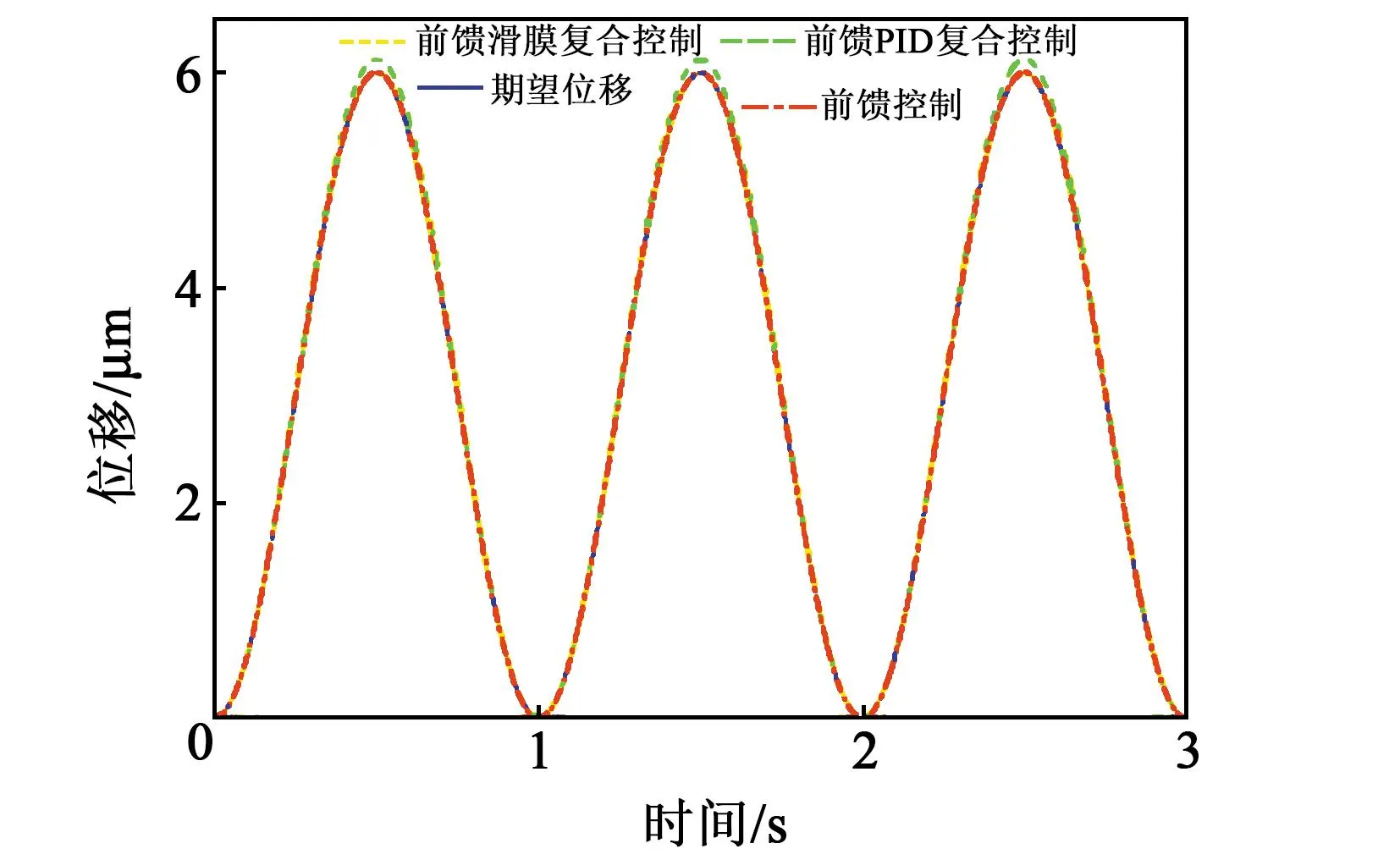
图7 1 Hz的跟踪效果
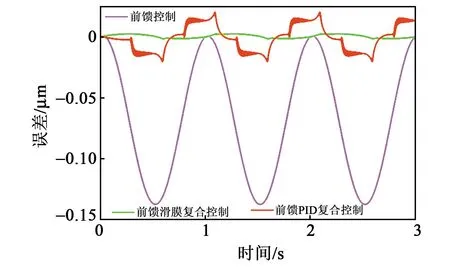
图8 1 Hz跟踪误差

图9 10 Hz的跟踪效果
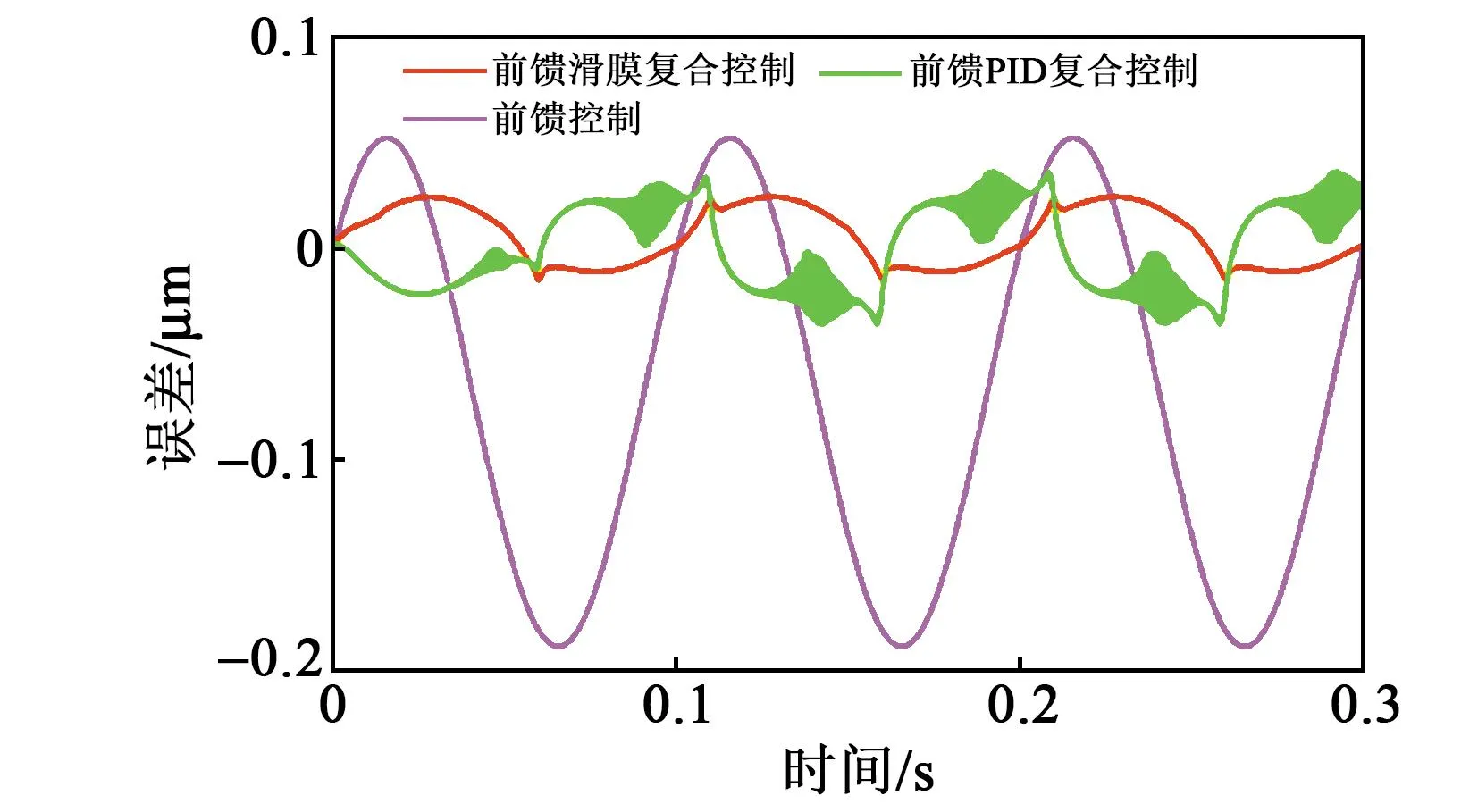
图10 10 Hz的跟踪误差
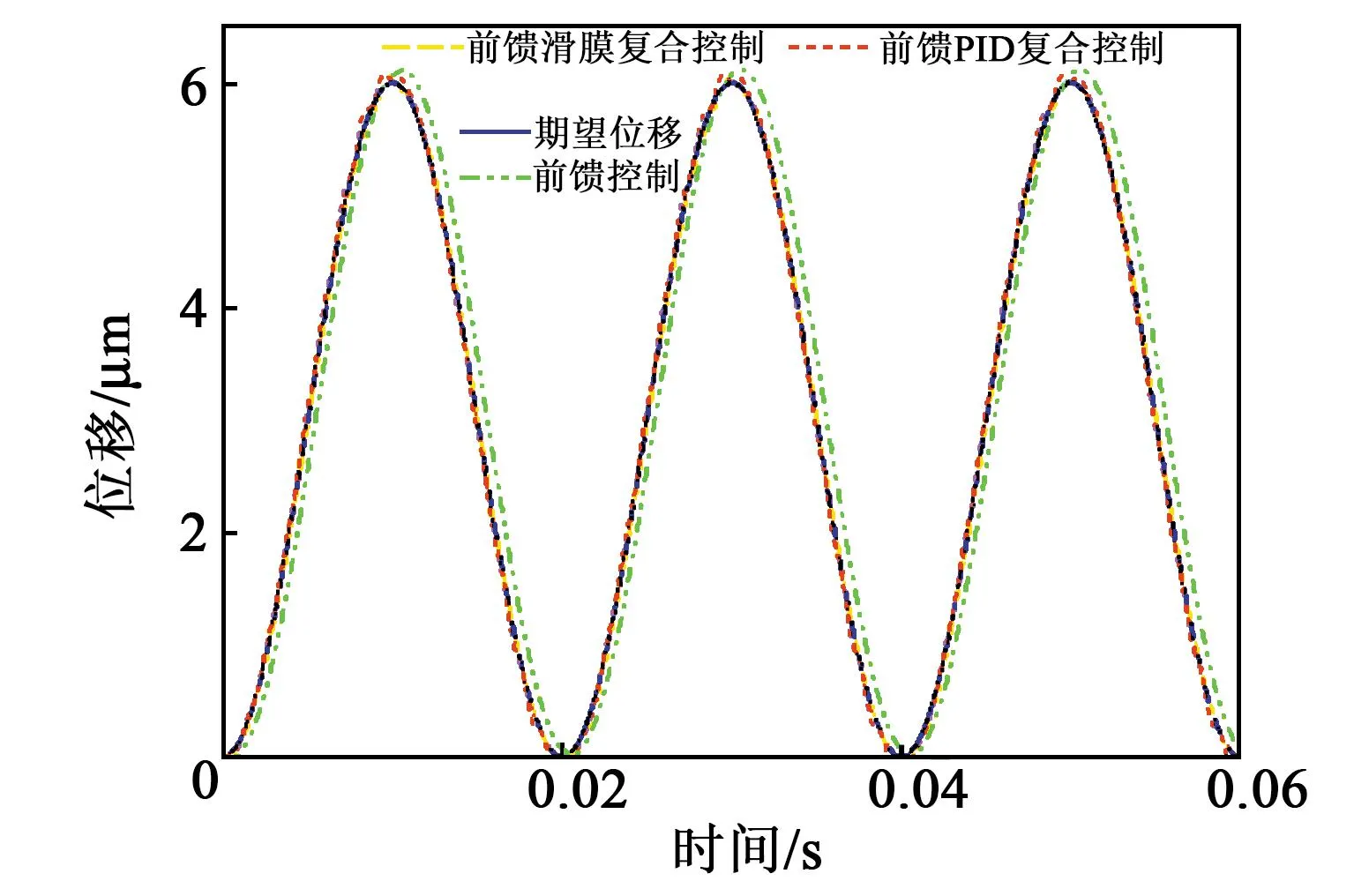
图11 50 Hz的跟踪效果
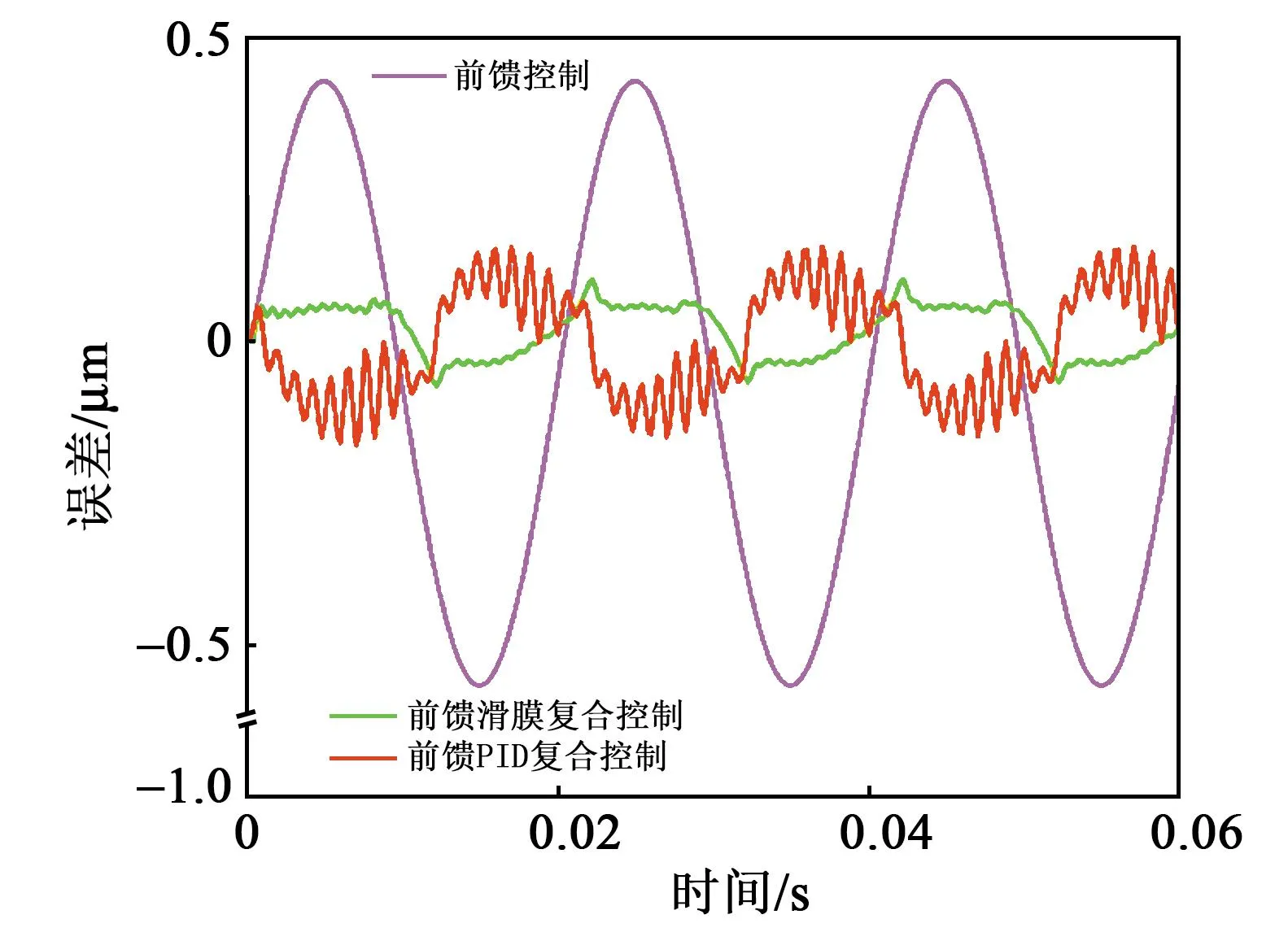
图12 50 Hz的跟踪误差

图13 90 Hz的跟踪效果

图14 90 Hz的跟踪误差
由图7-14可看出,基于传统的B-W模型Hammerstein结构的前馈补偿、 PID 反馈复合控制方法与本文提出的基于传统的B-W模型Hammerstein结构的滑模控制补偿方法都能实现实时跟踪控制。但在不同频率正弦信号输入下,本文提出的基于传统的B-W模型Hammerstein结构的滑模控制补偿跟踪均方根误差远小于其他两种控制方法,在1 Hz时,跟踪的均方根误差仅0.001 592 3 μm,基本能跟踪上,效果非常明显。
虽然跟踪均方根误差随频率增加而增大,但在正弦信号90 Hz激励下,本文提出的控制方案跟踪均方根误差为 0.073 625 μm。在很多实际工程应用中,反馈测量精度约为0.1 μm。相对于基于传统的B-W模型Hammerstein结构的前馈补偿控制方法,在90 Hz时跟踪均方根误差精度提高87.99%。相对于前馈补偿与 PID 反馈复合控制方法,在90 Hz时跟踪均方根误差精度提高58.69%。因此,与其他两种方法相比,本文提出的模型与控制方案精度更高。表1为3种控制方法的均方根误差对比。

表1 3种控制方法的均方根误差对比
4 结束语
针对传统的B-W模型无法精确表征压电陶瓷执行器非对称、率相关迟滞非线性特性,本文提出了一种基于传统的B-W模型Hammerstein结构新模型,并且利用粒子群算法辨识模型参数。在参数辨识后,通过与文献[20]的实际测量数据对比发现,本文提出的模型在迟滞非线性描述上与传统的模型相比更精确。在1 Hz单频静态激励下,模型的描述均方根误差为0.086 μm;在100 Hz 高频激励下,模型的均方根误差为0.186 μm,与100 Hz下传统模型均方根误差为0.654 95 mm相比,其精度得到提升。本文提出了前馈滑模复合控制方法,也同时设计了前馈和前馈PID复合控制两种控制器并进行对比。在1 Hz、10 Hz、50 Hz、90 Hz下,本文提出的控制方法的模型跟踪误差分别为0.001 592 3 mm、0.014 714 mm、0.047 274 mm、0.073 625 mm;前馈控制的模型跟踪误差分别为0.084 091 mm、0.109 21 mm、0.35816 mm、0.608 97 mm;前馈PID反馈复合控制的模型跟踪误差分别为0.010 823 mm、0.020 86 mm、0.088 56 mm、0.178 88 mm。通过误差分析对比发现,在1~100 Hz激励下,对比跟踪均方根误差,本文提出的控制策略比前馈控制和PID前馈复合控制的误差低,提高了 PEA 的定位精度和跟踪性能,能够应用于宽频带、高速精密定位控制及主动振动控制等领域。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21
遥测遥控(2022年1期)2022-02-11
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
自动化学报(2017年2期)2017-04-04
中学生数理化·七年级数学人教版(2016年2期)2016-05-30
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
电测与仪表(2015年21期)2015-04-09
新高考·高二数学(2014年7期)2014-09-18