
基于Jetson Nano的农业监测系统的设计与实现
2024-01-03 08:42荆旭君郭永刚
现代计算机 2023年21期
荆旭君, 郭永刚*,李 峰
(1. 西藏农牧学院水利土木工程学院,林芝 860000;2. 西藏土木水利电力工程技术研究中心,林芝 860000)
0 引言
随着物联网、大数据和人工智能等技术的现代农业管理系统的逐步发展,很多学者为了更好地了解农田环境信息,设计农业监测系统旨在通过实时监测和分析农田环境参数,为农作物提供良好的生长环境,保障农产品的质量,提高农业生产效率[1-4]。人工智能技术在智能农业监测系统方面有着广泛的应用前景,可以帮助人们更加准确、及时地分析预测农作物生长环境,有效地降低自然环境造成的损失[5-6]。丁奇安等[7]采用优化后的模型,利用Jetson Nano在嵌入式开发平台上进行了有效的推理验证;许龙铭等[8]利用Jetson Nano 平台驱动进行实时目标检测,通过搭建的卷积神经网络模型,主要完成水果识别;李扬等[9]将改进后的模型在Jetson Nano 2款嵌入式开发板上进行测试,充分利用图像识别技术提取草莓各阶段生长状况;黄河清等[10]在嵌入式平台Jetson Nano 优化算法后,试验结果表明,目标检测系统对柑橘果实的识别平均准确率达93.01%。目前大多数的学者研究倾向于用目标检测技术监测某种水果特征,测试结果单一。本文将Jetson Nano 迁移到农作物病虫害的监测,通过对多种农作物虫害相关的图像进行识别,可以快速准确地发现和定位农作物虫害(主要利用目标检测技术进行虫害识别)。
综上所述,结合大量设计及实际应用,本文研究并设计了一款基于Jetson Nano 的农业监测系统。相比现有智能农业监测系统,该设计通过Jetson Nano 识别虫害信息,通过智能手机和Web 网页实现数据共享和交互操作,系统的总体框架如图1 所示。借助人工智能技术,智能农业监测系统可以不断地学习和优化决策模型,提高预测和管理建议的准确性[11-12]。此外,通过分析历史数据和现有农业知识,系统还可以辅助农业科研、政策制定和市场分析等工作[13]。
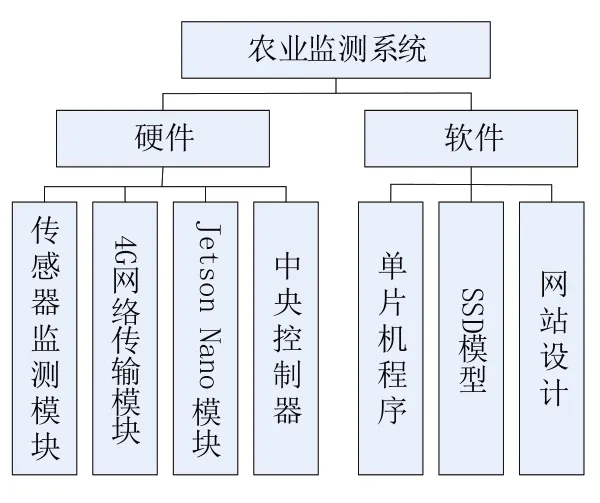
图1 农业监测系统总体架构图
1 系统硬件结构设计
1.1 系统总体架构
本文综合分析农作物生长环境中的电导率、pH 值和虫害等相关参数,并且考虑各电路之间的信号干扰、各个传感器和主控制芯片电源共用等因素,将电路进行模块化设计,方便电路之间进行信号传送[14]。如图2 所示,本系统的设计核心是一套覆盖农田环境的传感器网,以STC12C5A60S2 作为主控制系统,采用土壤温湿度传感器、风速风向变送器、光照温湿度传感器以及Jetson Nano 作为农田环境监测模块,通过接入不同类型的传感器和设备,系统可以监测各种作物生长情况和各种农业生长环境信息,利用RS-485 串口,通过modbus 总线读取传感器数据,最终由4G 网络通信模块将数据发送到远程计算机[15]。本次设计选择一块封闭式、免维护的12 V 蓄电池以及太阳能板作为监测系统的电源,提供12 V 电压以保证传感器工作稳定,电源电路设计了稳压处理,12 V 电压通过稳压电路后再输出。
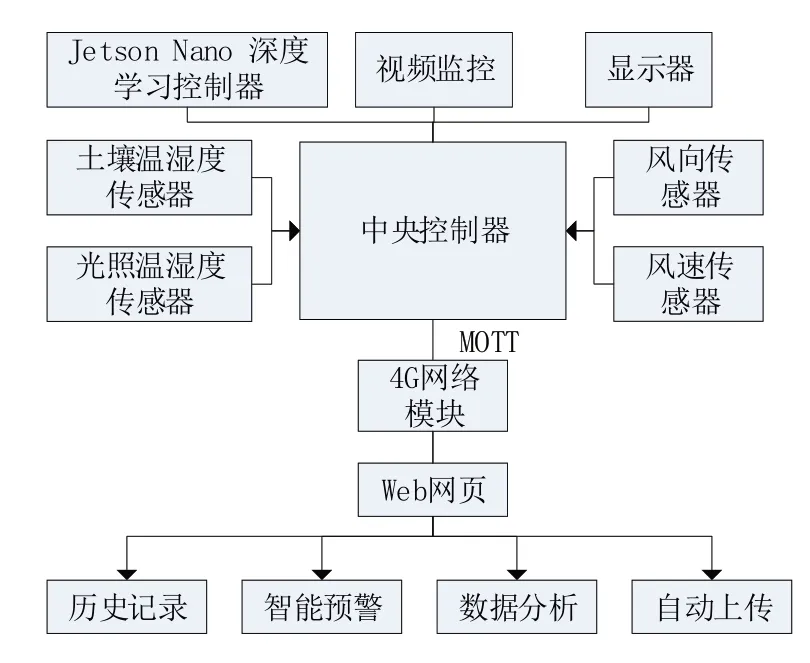
图2 农业监测系统硬件架构图
1.2 RS-485通信模块
TTL to RS485 module 模块是RS-485 通信模块的一种常用的通信模块,其主要作用是实现不同设备之间的数据传输和通信[16]。TTL 电平信号通常用于单片机内部的数据传输,而RS-485 电平信号则用于单片机与外部设备之间的通信。如图3 所示,TTL to RS485 模块通常由一个MAX3845 芯片和一些外围电路组成,其中RXD1、TXD1 管脚是发送和接收引脚,直接连接与STC12C5A60S2单片机的P1.1和P1.2 I/O口,其中A1 端和B1 端分别是接收和发送的差分信号端,直接与传感器的A 端和B 端相连,由一个0.1 μF 的电容进行滤波,可以提供稳定的电源和保证信号质量。

图3 TTL to RS485 module 模块电路图
1.3 传感器监测模块
为了监测土壤的温湿度、电导率、pH 值等数据,需要土壤综合传感器,可以感应并测量出土壤温湿度、pH 值、电导率等参数的变化,提供土壤状况的实时数据;光温湿度传感器可以测量周围环境的光、温度、湿度等信息,根据周围环境状况的变化,提供相关研究参数的实时变化;风速和风向变送器是测量气体流体中的风速和风向的传感器,根据气体流体的速度变化,将风速和风向转换成标准电信号输出。这些传感器通常由两个部分组成,一个是感应器,另一个是数据采集器。如表1所示,传感器的技术参数保证了传感器监测模块在农田环境中稳定工作。如图4所示,将所有传感器组合在一条RS-485 总线上,通过RS-485 通信模块将数据传输到单片机或其他设备进行分析处理。
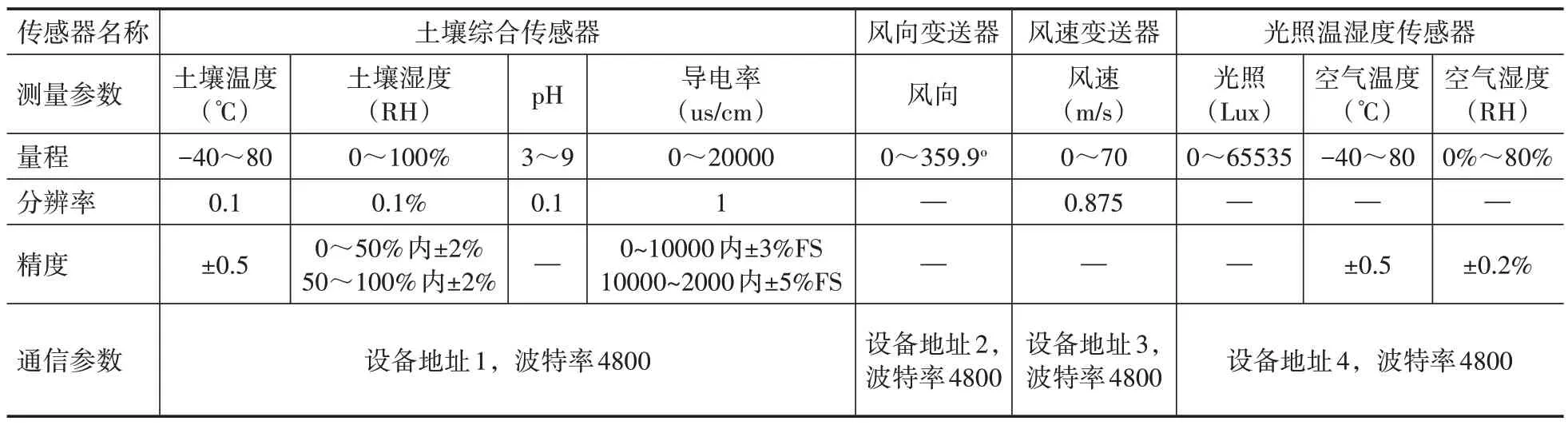
表1 各传感器技术参数

图4 传感器监测模块实物图
1.4 4G网络传输模块
4G 网络传输模块实现串口设备上传网络服务器,利用LTE Cat-1 网络互传数据所开发出的产品只需简单地设定AT 指令就可以方便地利用该产品在串口与网络之间实现双向的数据上传。农业监测系统需要实时收集传感器数据并将其传输至服务器。需要将WH-LTE-7S1网络传输模块、传感器与单片机连接,并通过TTL 串口实现数据通信,将收到的TTL 数据转换为4G 信号,通过无线网络将数据发送至远程服务器。
1.5 视觉处理单元模块
基于Jetson Nano 的虫害目标检测系统主要包括以下几个部分:图像采集模块、Jetson Nano开发板、AI 模型以及监测与控制系统[17-20]。如图5所示为Jetson Nano工作流程,图像采集模块进行初始化,保证正常运行后,利用图像采集器对不同的虫害进行动态拍摄,它基于Jetson Nano 的SSD 图像识别技术实现,将图像进行预处理,再通过深度学习模型训练对目标进行定位分类。明确植物虫害的分类信息并进行训练,再采用重复验证方式进行分类并归集处理。通过不断训练,提高系统对图像的识别率。
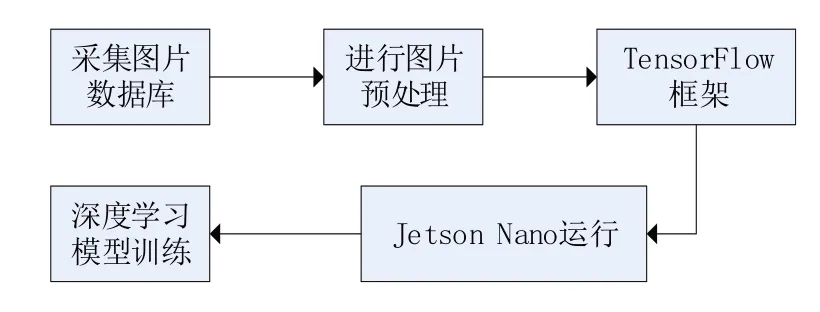
图5 Jetson Nano工作流程图
2 系统软件设计
2.1 单片机软件设计
传感器和Jetson Nano 软件程序在Keil 中使用STC 系列单片机配套的开发环境编程,主要采用模块化进行设计,对传感器数据采集、目标检测系统以及4G 网络通信上传部分分别使用C语言编程,各个功能模块单独工作,方便调试和采集。系统完整程序的工作流程图如图6 所示。该部分主要是完成了传感器监测系统各部分初始化,获取传感器和Jetson Nano 数据程序、显示数据程序、发送数据和其他函数程序的调用,风速、风向、光照温湿度和土壤中的温度、湿度、电导率以及pH 值信号的采集。主程序是整个控制系统的运行步骤,体现了农业监测系统的控制过程。
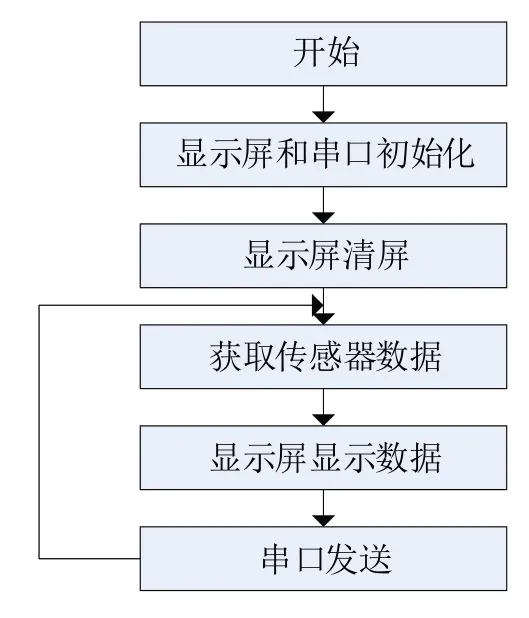
图6 单片机程序流程图
2.2 Web网页设计
本文采用MySQL 数据库,用于存储传感器监测模块和Jetson Nano 采集到的数据,并向用户提供响应速度快、查询质量高的数据服务。Web 网页主要由前端交互界面和后端数据处理两部分组成,在计算机终端登录本系统后,能够浏览系统数据监测界面,并在此界面查询各个传感器和Jetson Nano 的监测数据,具有访问快捷、操作简单的优点,如图7所示。为了提高用户体验,还设计了用户交互功能,通过智能手机扫描二维码可以随时查看农田环境信息,帮助用户轻松掌握各个环境参数。

图7 Web网页数据监测界面
3 目标检测技术在植物虫害检测中的应用
3.1 植物虫害检测功能设计
Jetson Nano 开发板负责图像处理和目标检测任务,搭载了强大的GPU,可以快速运行深度学习和计算机视觉算法。植物虫害目标检测采用SSD模型,本文的SSD是在原有SSD目标检测架构的基础上进行优化。最初SSD 采用在ImageNet 上预先训练的VGG 模型并将VGG 模型的全连接层更换为全卷积层,最终增加部分新卷积层来继续对图像进行特征提取。如图8 所示,经过模型训练,不同角度、光照条件和背景环境条件下,可以成功识别出这些与植物颜色比较相近的虫害。模型分析图像,识别出图像中的害虫,并将识别结果以边界框、标签等形式标记在原始图像上,同时记录识别到的虫害数量、位置等信息(SSD300 中的300 表示输入图像的尺寸为300×300)。为了能够有效地验证植物虫害识别的效果,选用18 种昆虫特征图,每一层特征图上的先验框尺寸为

图8 视觉识别检测目标图
式中:Sk表示先验框大小相对于图片的比例;Smin和Smax表示比例的最小值与最大值均为超参数;其中里面取0.2 和0.9;Sk为第k个特征参数图像上验框的最大尺寸占原始图像边长的比例;m表示选取的检测特征图的数量减去1;k为特征图的序号。
3.2 植物虫害检测测试结果
本文选取了7839 张图片作为训练集,首先将每一张图片进行了标注,随机打乱顺序后抽取其中90%(大约7055 张图片)作为训练集,选择其中10%(大约784张图片)作为测试集,总共进行了200 次epoch 训练,每一次训练,都会进行一次验证。表2 展示了训练过程中每个epoch训练完成后网络的损失函数值和平均精确率,为了便于观察测试集、平均精确率和验证集数据变化,每进行10 次训练,在表格中记录一次数据,SSD-loss、SSD-mAP、SSD-val-loss 分别代表SSD在训练集上损失函数值、SSD的平均精确度、SSD在测试集上的损失函数值。
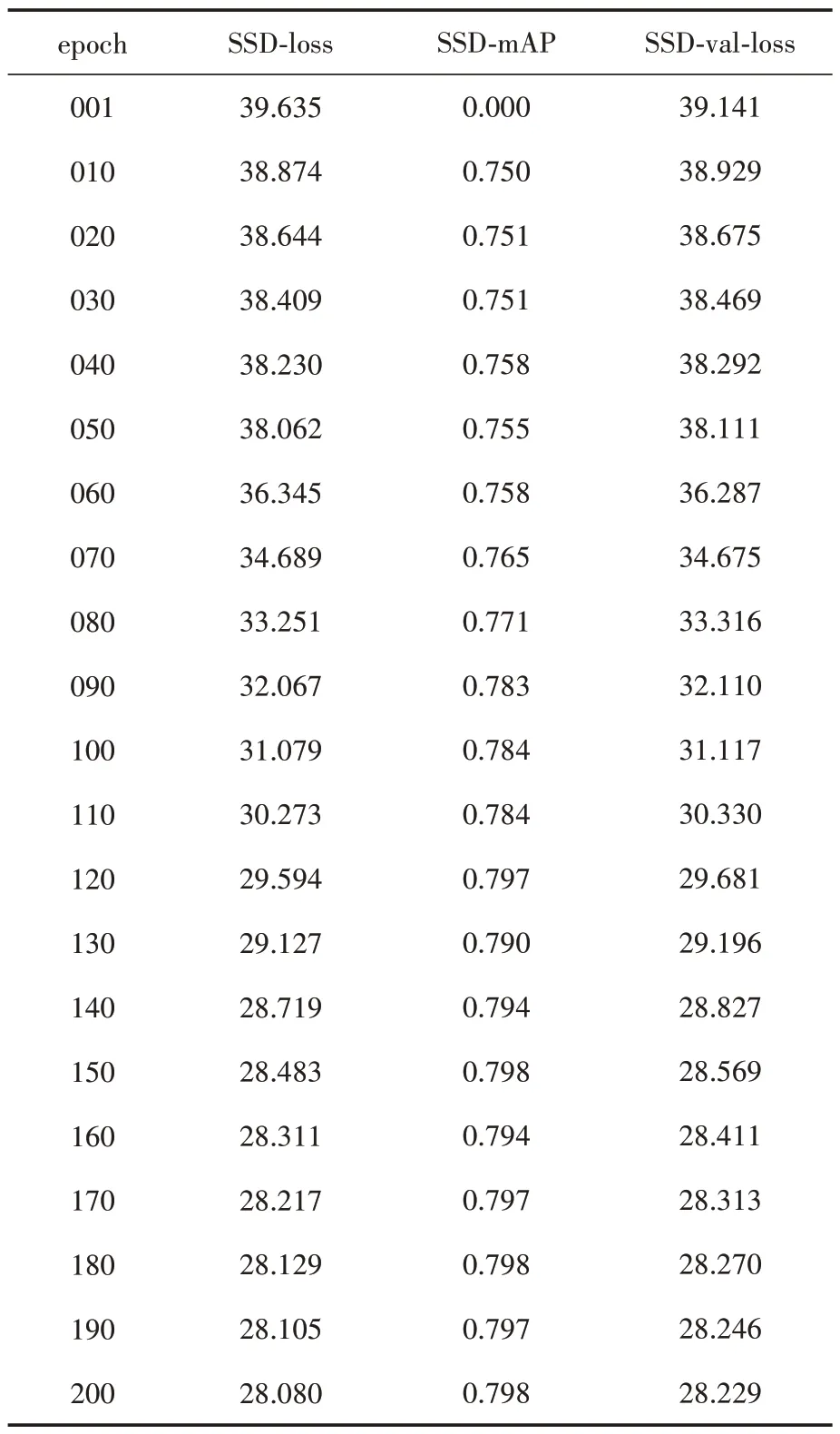
表2 各网络模型的损失函数值和平均精确度
网络学习模型在每个epoch 训练结束后计算出平均精度值和损失函数值,并绘制成折线图,图9 的左图中x轴代表训练的epoch,y轴为模型在测试集上的AP 值,右图中x轴代表训练的epoch,y轴为模型的loss值。SSD 网络模型训练和测试使用的输入图像分辨率为300*300。SSD 训练过程中每完成一个epoch 采集一次loss和mAP。训练初期loss呈现平缓下降的趋势,而精确率快速上升;训练达到50次以后,随着训练次数的逐渐增加loss值会逐渐减小,精确率变化率逐渐增大,在学习率衰减后loss快速下降,精确率快速上升,最终loss为28.0,mAP为0.80。

图9 SSD模型训练过程变化折线图
4 结语
本文从农业生产环境的实际应用角度出发,主要研发了基于Jetson Nano 的农业监控系统,以便实时准确监测农田环境数据。经过测试,系统已经实现设计需求,采集的数据精度较高。本文以农作物生长环境为研究对象,采用以RS-485 通信的传感器,通过串口接收、发送和上传数据,利用机器学习中的目标检测技术进行植物虫害方面的监测,检测结果是SSD300 训练过程中loss 和mAP 呈现出相关性,并搭建了简洁的Web 界面,以便于向用户呈现实时数据。针对现代农业监测系统的智能化特点,我们需要进一步推广目标检测技术在智能农业技术中的应用,可以通过应用目标检测技术继续检测农作物疾病和农作物长势,并且进一步研究基于Web 技术的多终端访问。基于Jetson Nano 的农业监测系统可以为实现可持续农业发展和现代农业的转型升级提供有力支撑。
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
今日农业(2021年17期)2021-11-26
河北果树(2020年4期)2020-11-26
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
今日农业(2019年13期)2019-08-12
时代英语·高一(2019年1期)2019-03-13
现代园艺(2017年22期)2018-01-19
现代园艺(2017年19期)2018-01-19
互联网天地(2016年2期)2016-05-04
